


1 引言
(1)液压系统通过液压泵驱动,将液压泵的机械能转化为液体压力能后再通过液体压力能来驱动负载,中间存在能量的二次变换导致传动效率低。
(2)液压管道接触面处存在不可避免的液压油泄露,会对环境造成污染。
(3)液压油性能,尤其是粘滞性受温度影响较大,随着温度升高管道内液压油的粘滞阻力增大,摩擦损耗增大,发热会导致密封橡胶老化过快,从而导致密封失效[4],同时高温容易引发火灾。
目前对大型机械臂驱动系统的研究仅局限于液压系统的优化设计,没有跳出液压驱动系统的圈子,无法彻底避免液压传动系统的固有缺点。只有改变驱动方式才能从根本上解决问题,因此本文提出采用永磁同步电动机螺旋系统直驱机械臂取代液压驱动,如图1所示。
图1
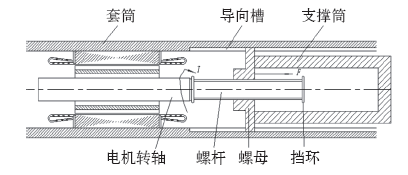
图1
永磁同步电机螺旋直驱结构示意图
Fig.1
Illustration of the structure of the permanent magnet synchronous motor with screw drive
2 参数转化和丝杠选用
本文以斗容为0.33m3的单动臂油缸挖掘机为例进行分析转化,其动臂油缸的参数见表1。
表1 挖掘机动臂油缸参数
Tab.1
| 名 称 | 参 数 |
|---|---|
| 活塞杆直径/mm | 65 |
| 缸桶直径/mm | 115 |
| 最大工作行程/mm | 900 |
| 工作油路压力/MPa | 26 |
| 活塞工作速度/(m/s) | 0.25 |
| 动臂提升时间/s | 3.3 |
| 动臂工作时间/s | 6.5 |
对于差动前进(即活塞的两侧同时进压力相同的油液)的活塞杆,其推力为
式中,A1为活塞无杆侧有效面积,m2;A2为活塞有杆侧有效面积,m2;p为供油压力(工作油压),MPa;d为活塞杆直径,m。
可得轴向推力为F = 86.276kN,则输出功率为P = Fv≈22kW,同步电动机额定功率为PN = Fv≈22kW。
选用导程为Ph = 20mm的滚珠丝杠副,由
得转速n = 750r/min,采用电动机丝杠螺杆直联,可得电机的额定转速nN = 750r/min。
根据滚珠丝杠设计原理,即
式中,F1,F2,…为轴向变化载荷,N;n1,n2,…为对应F1,F2,…时的转速,r/min;t1,t2,…为对应F1,F2,…时的时间,h。
表5 预期工作寿命Lh
Tab.5
| 应用场合 | 寿命/h |
|---|---|
| 普通机械 | 5 000~10 000 |
| 普通机床 | 10 000~20 000 |
| 数控机床 | 20 000 |
选择合适的系数并代入式(4)可得当量载荷C′am = 364.314kN,选用HFH63×20即可满足要求。
3 电磁设计
根据额定功率PN = 22kW,额定转速nN = 750r/min,将定子外径定为310mm,在保持气隙长度、空载反电动势和热负荷接近相等的情况下分别设计6极36槽和8极48槽两种不同极槽配合的永磁同步电动机,两台电动机的主要参数见表6。
表6 不同极槽配合方案参数比较
Tab.6
| 极槽配合 | 6极36槽 | 8极48槽 |
|---|---|---|
| 定子外径/mm | 310 | 310 |
| 定子内径/mm | 195 | 205 |
| 铁心长度/mm | 215 | 230 |
| 气隙长度/mm | 0.8 | 0.8 |
| 永磁体长度/mm | 84 | 64 |
| 永磁体宽度/mm | 7 | 6 |
| 空载反电动势/V | 203.3 | 203.5 |
| 热负荷/[A2/(cm·mm2)] | 1 003.13 | 934.68 |
| 额定转矩/N·m | 278.35 | 280.51 |
在Maxwell软件中建立模型,分别进行空载加零激励电流源仿真。空载仿真磁密云图分别如图2a、2b所示。
图2

图3
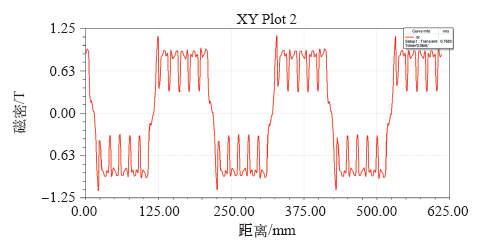
图3
6 极36 槽电机径向气隙磁密波形(有效值0.758 3T)
Fig.3
Radial air gap magnetic flux of 6-pole 36-slot motor (the effective value is 0.758 3T)
图4
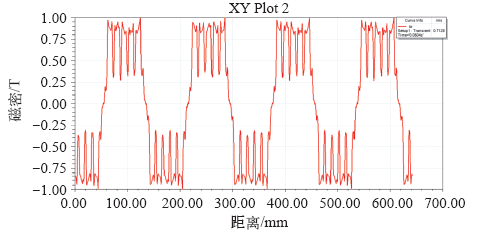
图4
8 极48 槽电机径向气隙磁密波形(有效值0.712 8T)
Fig.4
Radial air gap magnetic flux of 8-pole 48-slot motor (the effective value is 0.712 8T)
图5
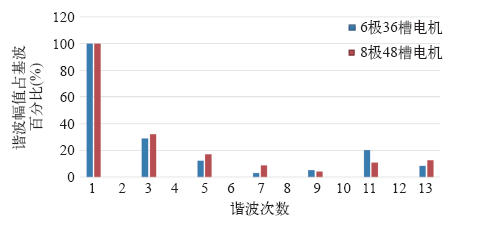
图5
各次谐波占基波百分比
Fig.5
The harmonics account for the percentage of the fundamental
图6

图6
6极36 槽电机齿槽转矩(14.671 3N)
Fig.6
Cogging torque of the 6-pole 36-slot motor (the effective value is 14.671 3N)
图7

图7
8极48 槽电机齿槽转矩(9.762 9N)
Fig.7
Cogging torque of the 8-pole 48-slot motor (the effective value is 0.712 8T)
4 优化处理
为降低齿槽转矩引起的转矩波动,本文采用转子冲片1.5倍不均匀气隙的方法对径向气隙磁密波形和齿槽转矩进行优化处理。所得空载径向气隙磁密进行谐波分解后如图8所示。
图8
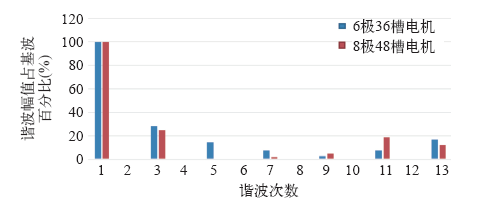
图8
1.5 倍不均匀气隙优化后的各次谐波占基波百分比
Fig.8
The harmonics account for the percentage of the fundamental when the uneven of air gap is 1.5
表7 不同电流角时额定电流下的转矩
Tab.7
| 电流角/(°) | 6极36槽电机转矩/N | 8极48槽电机转矩/N |
|---|---|---|
| 20 | 287.25 | 286.54 |
| 22.5 | 287.59 | 286.01 |
| 25 | 287.36 | 284.88 |
| 27.5 | 286.26 | 283.10 |
| 30 | 284.51 | 280.68 |
5 结论
本文对一台斗容为0.33m3的单动臂油缸液压挖掘机的液压参数进行转化,设计了不同极槽配合的两台永磁同步电动机,同时对电机进行分析和优化,得出如下结论:
(1)挖掘机用动臂油缸液压参数可经过合理的计算将轴向推力和运动速度转化为电动螺杆直驱用永磁同步电动机的功率和转速。
(2)通过仿真得到不同极槽配合下径向气隙磁密中3次谐波含量不同的结论,所设计的6极36槽电机谐波含量大于8极48槽电机谐波含量。
(3)3次谐波含量影响齿槽转矩的大小,3次谐波含量大的电机齿槽转矩大。
(4)通过转子冲片设计得到的不均匀气隙可以明显削弱径向气隙磁密中的3次谐波含量,同时减小齿槽转矩。
(5)永磁同步电动机螺杆直驱系统可以取代机械臂的液压驱动系统。
采用永磁同步电动机螺杆直驱系统代替液压驱动环节,不仅可以避免传动效率低、漏油污染环境、高温易发生火灾的问题,还对大型机械设备机械臂的精准数字控制提供了理论基础,具有重要意义。
参考文献
液压传动系统在工程机械中的应用研究
[J].
Research on application of hydraulic transmission system in engineering machinery
[J].
液压系统橡胶密封失效的原因分析及预防
[J].
Cause analysis and prevention of failure of rubber seal in hydraulic system
[J].
Fault diagnosis for heat pump swith parameter identification and clustering
[J].
DOI:10.1016/j.conengprac.2005.11.002
URL
[本文引用: 1]

Abstract
For reducing the energy consumption of heat pumps, fault detection and diagnosis (FDD) is fundamental. The FDD system presented is based on a gray-box process model, the parameters of which are identified online. The faults are classified from the parameters using clustering methods. Known clustering techniques have been simplified and new “vector clustering” techniques have been developed for classifying gradual faults. The FDD system has been tested in various real applications, for one of which the results are presented in this work. The contribution lies on the application side with a software tool developed for the fully automated training process.
电动推杆驱动串联双铰链柔性机械手的状态分析
[J].
State analysis of flexible manipulator driven by electric push rod in series
[J].
A new motor design for hermetic DC compressor
[C].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}