

1 引言
矢量控制调速范围广,具有出色的稳态性能,但参数整定不当容易引起系统的超调和振荡,同时交、直轴变量存在耦合以及电流环的带宽一定程度上限制了系统的动态性能[14],增大比例增益可以提高系统动态响应,但代价是引入了噪声,从而影响系统的稳定性。直接转矩控制结构简单、有快速的动态响应,但是滞环比较器的使用,导致转矩脉动和磁链脉动较大,开关频率不固定,在一些高性能控制领域,应用受到限制。模型预测控制原理简单,且不需复杂的电流内环参数的整定,可以实现对指令信号无超调的快速跟踪。文献[18]将磁场定向控制和预测转矩控制在相同的实验条件下进行了比较,实验结果表明预测转矩控制比磁场定向控制的稳态性能略差,但在动态性能上有明显提高。
模型预测控制根据控制目标的不同分为转矩预测控制(Predictive Torque Control,PTC)[6,9,15]和电流预测控制(Predictive Current Control,PCC)[12,16-17]。其中基于空间矢量调制(SVPWM)的PCC根据模型预测方程得到电流跟踪所需要的电压指令,同时结合SVPWM技术将电压指令转换成开关状态,有效减少算法对实时性的要求,具有动态响应快,转矩脉动和磁链脉动比较小的优点,是一种理想的高性能永磁同步电机控制方法。但是这种方法依赖被控对象参数的精确性,一定程度上限制了它的实用性。很多文献针对这点对预测控制做出改进。文献[19]利用相邻周期的两个预测模型相减来消除恒定项,实现对电流的闭环控制。文献[20]基于无差拍预测控制原理,提出一种鲁棒电流预测控制算法。这两种方法都增强了系统在模型参数不准确时的稳定性。
相比模拟控制,数字控制具有抗干扰性强,噪声容限大,易于实现复杂算法、可重复编程等优点,但是在数字控制中,由于A-D转换时间、算法计算时间和零阶保持器等造成的延时,会减小系统带宽。甚至在某些情况下,系统会发生振荡甚至失去稳定性。
因此,本文提出一种基于一拍延时补偿的永磁同步电机电流预测控制。根据永磁同步电机模型,计算出前一时刻的反电动势项,经过一拍延时补偿,再将反电动势项带入当前时刻电压方程,消除反电动势项中参数误差的影响。不同于文献[19,20]中假设的反电势基本不变,本文考虑了反电势在过去3个控制周期的变化,进一步通过取平均值得到了更加平滑和精确的反电势估计。这种方法不仅消除了延时的影响,而且通过表达式可以看出,实际参与计算的只用到了定子电阻和电感参数,降低了模型预测控制对参数的依赖性。利用实验室一台1.5 kW的表贴式永磁同步电机在基于TMS320F28335 DSP的平台上完成实验。实验结果表明,系统在很宽的速度范围内均具有良好的动静态性能,并对电感参数具有很强的鲁棒性。
2 永磁同步电机数学模型
为了更好地分析所提出的方法,这里简化分析,在推导中作如下假设:
(1)定子绕组为Y型联结。
(2)反电动势为正弦,忽略饱和与谐波的影响。
(3)不计涡流和磁滞损耗。
(4)转子上无阻尼绕组,永磁体也无阻尼作用。
(5)励磁电流无动态响应过程。
永磁同步电机在同步旋转坐标系下的数学模型可以表达为
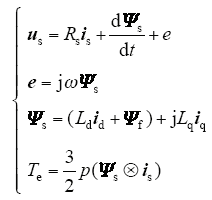
式中,us为定子电压矢量;Rs为定子电阻;e为反电动势;is、id、iq分别为定子电流矢量和d、q轴电流矢量;Ψs为定子磁链矢量;ω为转速;Ld、Lq为d、q轴电感;Ψf为永磁体磁链;Te为电磁转矩;p为极对数。
本文中实验使用的是表贴式永磁同步电机,所以电感可以简化为

电机的运动方程可表示为
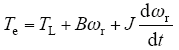
式中,TL为负载转矩;B为摩擦系数;ωr为转子机械角速度;J为转动惯量。
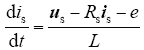
根据式(1),选择定子电流为状态变量,得到如下式所示的微分方程
3 带延时补偿的电流预测控制
3.1 总体结构框图
在本文提出的方法中,摒弃了磁场定向控制中的电流内环,利用预测控制的思想得到下一时刻电压矢量。整个控制系统仅有速度外环通过PI指令产生定子电流参考值,控制思想简单直接。
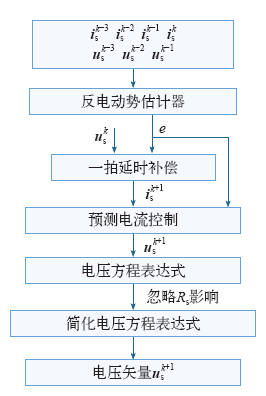
永磁同步电机电流预测控制的基本框图如图1所示。反电动势估计器根据当前以及之前时刻的电压和电流信息估算出反电动势项。利用反电动势和经过延时补偿的电流,由电流预测控制算法得到下一时刻的电压矢量。下面对方法做进一步详细介绍。
图1
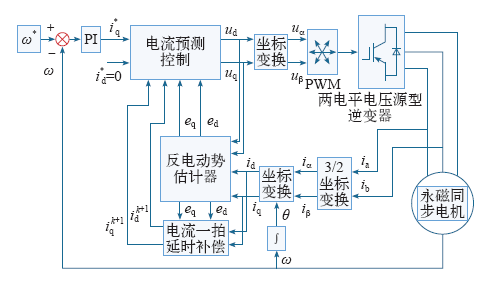
图1
永磁同步电机电流预测控制的系统框图
Fig.1
System diagram of predictive current control for PMSM drives
3.2 反电动势估计
根据式(4)可知,预测下一时刻定子电流时需要反电动势。但是采用式(1)计算反电动势时,因为用到电机电感参数和永磁体磁链,所以对电机的参数准确性要求很高。然而由于温度、饱和等因素的影响,电机的参数会发生变化,从而导致实验结果存在较大的误差。因此本文提出一种估算反电动势的方法,以减小电机参数不准确带来的影响。
对式(4)在k - 1到k时刻进行离散化,得到k - 1时刻的反电动势为

式中,Tsc是控制周期。由于 
同理,可以得到k - 2和k - 3时刻的反电动势为
在同步旋转坐标系下反电动势是直流量,将3个时刻的值相加求得平均值,可以得到更加平滑准确的反电动势估计为
3.3 延时补偿

图2
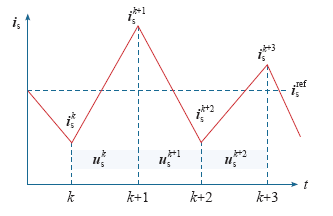
文献[24]提出了带宽扩展策略,在一个载波周期内实现定子电流的两次采样和PWM的两次更新。在保持开关频率不变的情况下,理论上可扩展电流环带宽一倍以上,大幅提高永磁伺服系统的动态性能。但这种方法占用系统资源较多,对控制器要求较高,并且在PWM调制频率一定的条件下无法进一步减小系统延时,同时一个周期内两次采样两次更新相对复杂。本文采用一种简单有效的一拍延时补偿方法。由式(4)可知,利用二阶欧拉离散法,根据k时刻的电流 



3.4 电流预测控制
图3为电流预测控制算法流程图。
图3
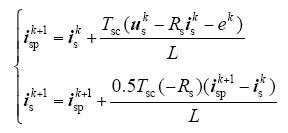
对式(4)在k到k+1时刻离散化,并将电流参考值 
将一拍延时补偿考虑进式(10)中,同时将反电动势的值代入,得到在下一时刻作用的电压矢量 
因为Rs
从式(13)可以很直观地看出,本文提出的方法仅用到了电感和电阻参数,对比传统的预测控制中需要电阻、电感和永磁体磁链,参数明显减少,由于参数误差导致性能下降的概率也大幅减小,物理意义十分明显。
0.458 1N·m,电流THD为7.345 2%。由此可见,本文所提方法的稳态性能优于文献[19]。限于篇幅,该仿真结果不再详细列出。
4 实验结果
为了验证文中所提控制算法的正确性,通过两电平交流调速平台对该方法进行了实验验证。实验控制平台的搭建如图4所示。逆变器的输出接一台1.5kW的表贴式永磁同步电机,电机通过磁粉制动器来加载。控制器采用32位浮点型DSP TMS320F28335,与以往定点DSP相比,该器件具有精度高、成本低、功耗小且A-D转换更精确快速等优点,同时运算频率高达150MHz,可以方便地实现文中的控制算法。另外在控制板上还扩展了4通道的DA,便于内部变量观测。实验中除定子电流采用电流探头直接测得外,其他变量都通过12位DA输出到示波器上显示。实验参数见下表,系统采样频率为10kHz。
图4
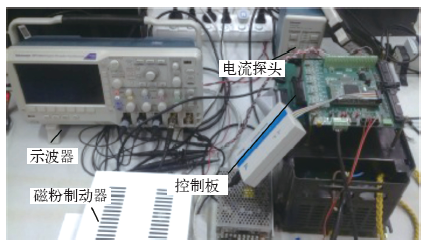
表 实验参数
Tab.
| 参 数 | 数 值 |
|---|---|
| 电机额定电压Un /V | 380 |
| 电机额定功率Pn /kW | 1.5 |
| 直流母线电压Udc /V | 540 |
| 电机额定频率f /Hz | 100 |
| 电机极对数np | 4 |
| 电机定子电阻Rs /Ω | 0.4 |
| d轴和q轴电感L /mH | 4.41 |
| 电机额定转矩Tn /N·m | 9.55 |
| 永磁体磁链Ψsif /Wb | 0.212 5 |
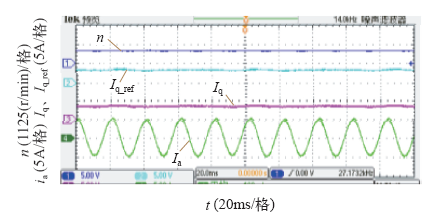
实验时共有4路示波器通道输出,其中通道1显示的是通过编码器测得的实际速度,通道2为q轴电流的参考值,通道3为q轴电流的实际值,通道4为电机a相电流。
4.1 稳态性能
图5
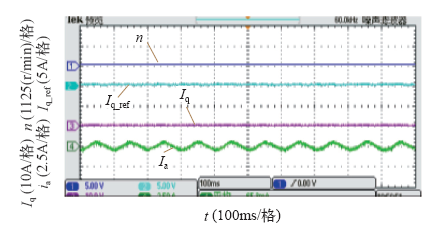
图6
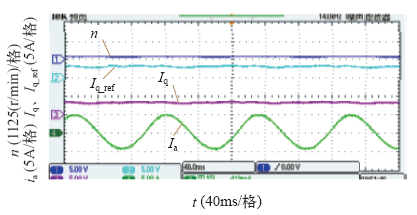
图7
为了分析文中所提方法的鲁棒性,将电感参数减小20%,与电感参数未变化的波形加以比较,如图8所示。通过对比发现,当电感参数在一定范围内变化时,转速的影响不大,电流的正弦度变化也不大。总体上来看,稳态性能良好,证明了所提方法的鲁棒性。
图8
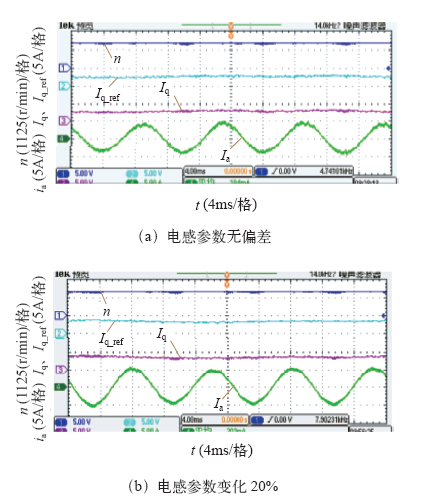
图8
1500r/min时带额定负载的稳态实验波形
Fig.8
Steady state of 1500r/min with 100% rated load
为了进一步分析稳态性能,针对定子电流做了FFT分析。图9为1 500r/min额定负载下的稳态定子电流。A相定子电流的THD为6.87%,电流谐波主要分布在采样频率10kHz及整数倍。
图9
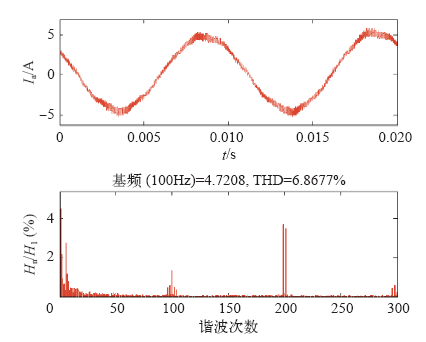
图9
1 500r/min带额定负载稳态电流THD分析
Fig.9
Steady state current THD analysis of 1500r/min with 100% rated load
4.2 动态性能
图10为PI调节器与本文所提出方法的q轴电流跟踪效果对比图。从图中可以看出,当参考电流在某一时刻由0A阶跃到6A时,改进的电流控制方法快速地达到给定值,而PI调节器的方法则要经过很长的调节时间才能达到稳定。可见,本文提出的方法有更好的动态性能。
图10
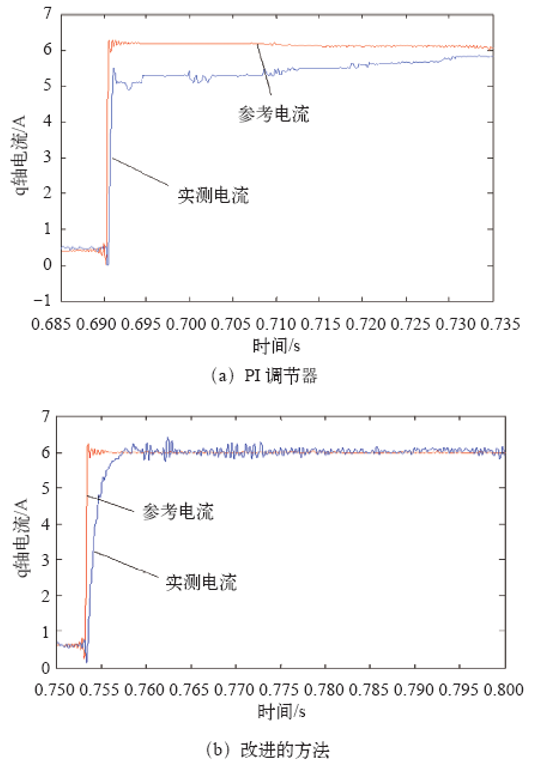
图11

图11
0~1500r/min空载起动波形
Fig.11
Starting response from 0 to 1500r/min without load
图12
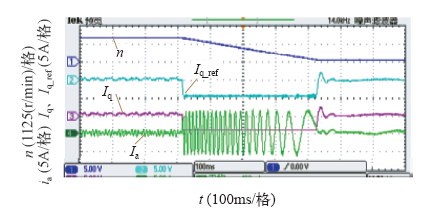
图12
1500r/min降到75r/min空载波形
Fig.12
Deceleration from 1500r/min to 75r/min without load
图13

为了直观的比较q轴电流的跟踪性能,图14为电机在1 500r/min时正反转波形,其中将示波器2、3通道的零位设置在同一位置。从图中可以看出,在额定负载情况下q轴参考值与实际值非常一致,跟踪性能良好。
图14
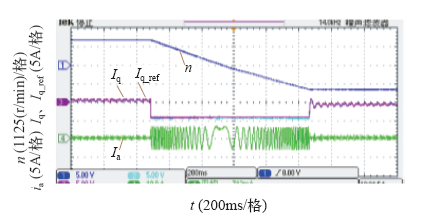
图14
2和3通道重合时1500r/min正反转波形
Fig.14
Reverse to forward operation at 1500r/min when channel 2 and 3 overlap
5 结论
本文针对永磁同步电机高性能调速,提出了一种考虑控制延时补偿的永磁同步电机电流预测控制方法。传统的矢量控制电流内环采用PI调节器,调整时间长且动态性能差。本文采用预测控制取代PI调节器来得到输出电压矢量。同时为了消除由于DSP更新机制、采样和滤波等造成的延时影响,采取了一种简单有效的一拍延时补偿方法。相比传统的预测控制算法,本文只需要电阻和电感参数,大大简化了对电机参数的依赖性。实验结果表明本文所提出的方法在高速和低速情况下都可以带额定负载稳定运行并且具有良好的动态性能和稳态性能,同时该方法具有较强的鲁棒性,为永磁同步电机高性能调速在实际中的应用提供了一种较好的解决方案。
参考文献
Development of PMSM drives for hybrid electric car applications
[J].DOI:10.1109/TMAG.2006.887718 URL [本文引用: 1]
稀土永磁同步电动机的节能应用
[J].
Energy conservation application of REPMSM
[J].
High performance VOC-FOC based wind generator system with induction machine
[C].
FOC and flux weakening for traction drive with permanent magnet synchronous motor
[J].
Model predictive direct torque control; part I: concept, algorithm, and analysis
[J].DOI:10.1109/TIE.2008.2007030 URL [本文引用: 2]
A novel duty cycle control strategy to reduce both torque and flux ripples for DTC of permanent magnet synchronous motor drives with switching frequency reduction
[J].
Sensorless direct torque and flux-controlled IPM synchronous motor drive at very low speed without signal injection
[J].
Predictive direct torque control for the PM synchronous machine
[J].DOI:10.1109/TIE.2005.855662 URL [本文引用: 2]
Predictive control of power converters and electrical drives
[M].
Predictive control in power electronics and drives
[J].
DOI:10.1016/j.isatra.2019.08.052
URL
PMID:31506164
[本文引用: 1]

Finite control set model-based predictive control techniques are distinguished by being an interesting alternative to traditional field oriented control techniques for multiphase drives due to their fast dynamic response and flexibility in the introduction of constraints. However, those predictive control techniques have some drawbacks regulating the (x-y) current components which can cause machine losses as well as a high computational burden. This paper presents a comparative study of an enhanced predictive current control technique with a conventional predictive control technique and two hybrid predictive control techniques applied to an asymmetrical six-phase induction motor drive in terms of current tracking, total harmonic distortion of stator currents and computational burden. Experimental results are reported to demonstrate the benefits of the different current control techniques by using the mean squared error and total harmonic distortion of stator currents as quality figures of merit and the number of floating point operations to measure the computational burden of each predictive control, thus concluding the advantages and limitations of each technique at transient and steady regimes.
A discrete-time predictive current control for PMSM
[J].DOI:10.1109/TPEL.63 URL [本文引用: 2]
Model predictive control—a simple and powerful method to control power converters
[J].DOI:10.1109/TIE.2008.2008349 URL [本文引用: 1]
Vector control methods for induction machines: an overview
[J].DOI:10.1109/13.925828 URL [本文引用: 1]
Model predictive direct torque control of a five-level anpc converter drive system
[J].DOI:10.1109/TIA.2012.2210174 URL [本文引用: 1]
Predictive current control of dual three-phase drives using restrained search techniques
[J].
DOI:10.1109/TIE.2010.2087297
URL
[本文引用: 1]
Predictive control techniques have recently been applied with success to conventional and multiphase electrical drives. The additional degrees of freedom in multiphase drives make the real-time implementation of optimal solutions difficult due to the increased number of iterations. This paper proposes a predictive control technique that reduces the available voltage source inverter switching states according to predefined constraints. The introduced method, called as restrained search predictive control, favors on-line implementation and improves the current tracking performance. Simulation and experimental results are provided to test the viability of the presented technique.
A predictive current control associated to EKF for high performance IPMSM drives
[C].
High-performance control strategies for electrical drives: an experimental assessment
[J].
DOI:10.1109/TIE.2011.2158778
URL
[本文引用: 1]
This paper presents a comparative study between field-oriented control (FOC) and Predictive Torque Control (PTC) applied to induction machines. Both strategies are implemented on the same experimental bench and similar tests are performed. Furthermore, they were previously adjusted to get an equivalent switching frequency at a specific operation point, achieving the fairest possible comparison at steady state. Experimental results verify that PTC can achieve results similar to FOC, possibly even improving performance in transient conditions.
永磁同步电机改进电流预测控制
[J].高性能永磁同步电机伺服系统要求有快速响应的电流内环以保证系统的高动态性能。传统PI调节器容易出现超调及振荡调整过程, 应用场合受到限制。传统的预测控制策略可实现快速的动态响应同时避免超调, 但依赖被控对象的精确数学模型。本文提出了一种改进的永磁同步电机电流环预测控制方法, 利用相邻周期的两个预测模型相减来消除恒定项, 实现对电流的闭环控制。相对于传统预测控制, 改进方法仅使用一个电机参数, 有效降低了对模型参数准确性的依赖, 同时闭环结构可避免出现稳态误差。相对于PI调节器, 改进方法在实现对电流指令快速跟踪的同时可避免超调和振荡调整过程, 动态控制性能更优。仿真和实验结果验证了所提方法的有效性。
An improved predictive current control method for permanent magnet synchronous motors
[J].高性能永磁同步电机伺服系统要求有快速响应的电流内环以保证系统的高动态性能。传统PI调节器容易出现超调及振荡调整过程, 应用场合受到限制。传统的预测控制策略可实现快速的动态响应同时避免超调, 但依赖被控对象的精确数学模型。本文提出了一种改进的永磁同步电机电流环预测控制方法, 利用相邻周期的两个预测模型相减来消除恒定项, 实现对电流的闭环控制。相对于传统预测控制, 改进方法仅使用一个电机参数, 有效降低了对模型参数准确性的依赖, 同时闭环结构可避免出现稳态误差。相对于PI调节器, 改进方法在实现对电流指令快速跟踪的同时可避免超调和振荡调整过程, 动态控制性能更优。仿真和实验结果验证了所提方法的有效性。
永磁同步电机电流预测控制算法
[J].在同步旋转轴系下,提出了一种基于无差拍算法的永磁同步电机离散化电流预测控制方法,来提高电机电流环的性能。基于电机数学模型,电流控制器根据电流给定和反馈值计算得到电压矢量,通过空间矢量脉宽调制模块将电压矢量转换为开关信号。引入了鲁棒电流预测算法,来减小预测模型参数误差对系统稳定性的影响。仿真和实验结果表明,与传统矢量控制相比,永磁同步电机电流预测控制算法有效地提高了伺服系统电流环的动态性能和稳态精度。
A predictive current control scheme for permanent magnet synchronous motors
[J].在同步旋转轴系下,提出了一种基于无差拍算法的永磁同步电机离散化电流预测控制方法,来提高电机电流环的性能。基于电机数学模型,电流控制器根据电流给定和反馈值计算得到电压矢量,通过空间矢量脉宽调制模块将电压矢量转换为开关信号。引入了鲁棒电流预测算法,来减小预测模型参数误差对系统稳定性的影响。仿真和实验结果表明,与传统矢量控制相比,永磁同步电机电流预测控制算法有效地提高了伺服系统电流环的动态性能和稳态精度。
PI type dynamic decoupling control scheme for PMSM high speed operation
[C].
Time delay compensation of digital control for DC switch mode power supplies using prediction techniques
[J].DOI:10.1109/TPEL.63 URL [本文引用: 1]
Analysis of one step delay in direct torque control of permanent magnet synchronous motor and its remedies
[C].
永磁交流伺服系统电流环带宽扩展研究
[J].在数字控制交流伺服系统中,制约电流环带宽的因素主要包括功率器件的开关频率和A/D采样时间、计算处理、PWM占空比更新等数字控制延时。开关频率的提高会带来开关损耗的增加,因此,在不改变功率器件开关频率的前提下扩展电流环的带宽很有必要。在同步旋转坐标系下的电流解耦控制基础上,分析了永磁交流伺服系统中电流采样和占空比更新方式产生的延时对电流环带宽的影响,并提出了带宽扩展策略,在一个载波周期内实现定子电流的双次采样和PWM占空比双次更新。在保持开关频率不变的情况下,理论上可扩展电流环带宽1倍以上,从而可以大幅提高永磁交流伺服系统的动态性能,仿真和实验结果验证了理论分析的正确性和方法的有效性。
Current loop bandwidth expansion for permanent magnet AC servo system
[J].在数字控制交流伺服系统中,制约电流环带宽的因素主要包括功率器件的开关频率和A/D采样时间、计算处理、PWM占空比更新等数字控制延时。开关频率的提高会带来开关损耗的增加,因此,在不改变功率器件开关频率的前提下扩展电流环的带宽很有必要。在同步旋转坐标系下的电流解耦控制基础上,分析了永磁交流伺服系统中电流采样和占空比更新方式产生的延时对电流环带宽的影响,并提出了带宽扩展策略,在一个载波周期内实现定子电流的双次采样和PWM占空比双次更新。在保持开关频率不变的情况下,理论上可扩展电流环带宽1倍以上,从而可以大幅提高永磁交流伺服系统的动态性能,仿真和实验结果验证了理论分析的正确性和方法的有效性。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}