

1 引言
永磁同步直线电机是一种新型的直线驱动装置,具有大推力、大功率且动态响应好等优点。因此,被广泛应用于激光雕刻机、高速雕铣机等机床行业[1]。
2 PMSLM的二自由度矢量控制系统
2.1 PMSLM的数学模型
图1
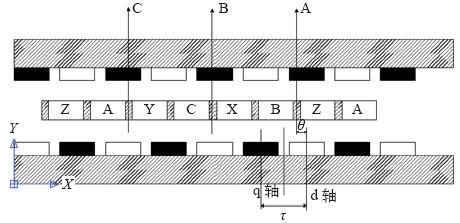
图1
表贴式永磁同步直线电机横截面示意图
Fig.1
Cross section of surface permanent magnet synchronous linear motor
在旋转坐标系下,PMSLM数学模型的电压、磁链、电磁推力和运动方程分别描述如下:
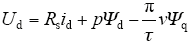
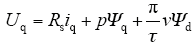
(1)电压方程为
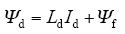
(2)磁链方程为

(3)电磁推力方程为
(4)运动方程为
2.2 PMSLM的二自由度控制器设计
图2
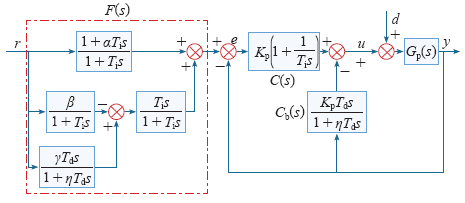
图2
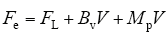
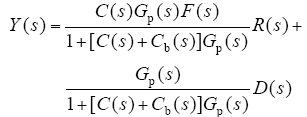
设定值滤波器型二自由度PID控制器
Fig.2
Set data filter type two degree of freedom PID controller
由图2可以计算出输入与输出的关系式为
其中

分析式(7)~式(10)可知,调整Kp、Ki、Kd可实现抗干扰特性最优;调整α、β、γ能使设定值跟随性能达到最佳(本文取α = 0.35,β = 0.008、γ = 1),从而实现双优控制。
3 基于遗传算法的PID控制参数优化
对于二自由度PID控制器参数的优化,本文首先采用传统经验整定方法确定3个控制参数的大致值;然后在此基础上,采用遗传算法进一步优化,得出一组最优的控制参数值。
遗传算法是一种高度并行、随机且具有很强容错能力的全局最优算法,适用于非线性的复杂问题的求解[13]。后续的仿真结果表明该算法非常适合解决参数优化的问题。
3.1 基于遗传算法对PID控制器参数的寻优
(1)确定优化参数以及参数数值范围,然后编码产生初始群体。将Kp、Ki、Kd确定为优化参数;参数寻优的数值范围设在传统整定出的3个参数值的附近,这样可避免局部收敛或者收敛时间过长;编码方式采用的是实数编码,进而产生初始群体。
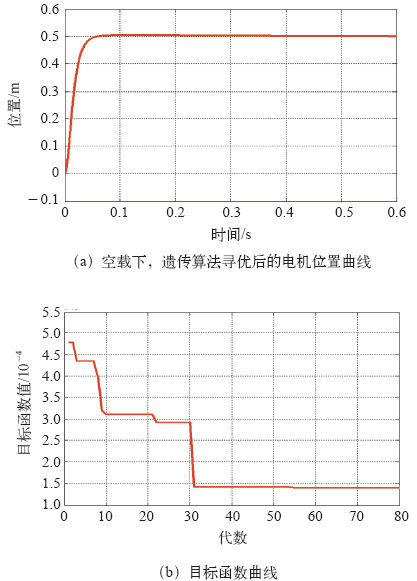
(2)适应度函数的构造。适应度函数指导着遗传算法进行不断搜索,它是评估选择操作的依据,反映群体中个体对环境适应能力的强弱[14]。本文的目标在于通过优化控制器参数值,使控制器输出的绝对误差与时间乘积的积分达到最小。因此,定义的目标函数为
适应度函数取目标函数的倒数。在优化过程中,用个体的适应度函数值去评价优良基因,从而为下面遗传算法的选择、复制操作做服务。
(3)选择策略与新个体的产生。选择策略采用的是适应度比例选择。它的主要思想是:计算每个个体的适应度值,求出个体在整个群体中被选择、复制的概率,此概率值与群体规模的乘积便是该个体复制到下一代的个数,进而产生新个体。
(4)交叉和变异算子的设计。本次采用的是两点(随机)交叉,交叉概率Pc = 0.90;接着以自适应变异概率Pm = 0.10 - [1∶1∶size]×(0.01)/size进行个体的基因变异。
(5)群体规模、算法执行最大迭代数的选取。群体规模的大小决定着遗传算法搜索性能优良程度。本文选取的群体规模size = 30,算法执行最大迭代数G = 80。
(6)重复上述选择、复制、交叉、变异操作,不断优化参数,直至参数收敛或达到预定的指标。
3.2 基于遗传算法优化PMSLM二自由度PID控制器参数的结构图
本文所研究的PMSLM矢量控制系统是一个三环控制系统。位置环的控制器是二自由度PID控制器,控制参数值采用遗传算法进行寻优,其余两个环的参数值采用传统的整定方法进行整定。基于遗传算法优化二自由度控制器的结构图如图3所示。
图3
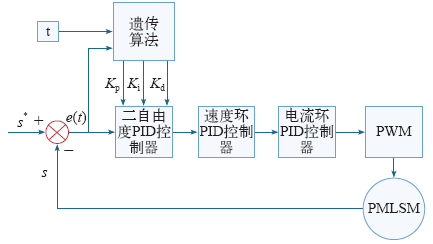
图3
基于遗传算法的二自由度PID控制参数优化
Fig.3
Optimization of two degree of freedom PID control parameters based on the genetic algorithm
4 仿真验证与结果分析
本文所研究的被控对象是表面双次级型动圈式无铁心永磁同步直线电机,样机结构参数见下表。
表 双次级永磁同步直线电机样机参数
Tab.
| 参 数 | 数 值 |
|---|---|
| 动子质量Mf /kg | 0.17 |
| 永磁体产生的磁链Ψf/Wb | 0.178 |
| 动子的绕组电阻Rs/Ω | 8.4 |
| 交轴电感Lq/H | 0.008 |
| 直轴电感Ld/H | 0.008 |
| 电机极对数P | 4 |
| 电机永磁体极距τ/m | 0.001 58 |
| 持续电流I/A | 1.8 |
| 峰值电流I/A | 5.3 |
图4
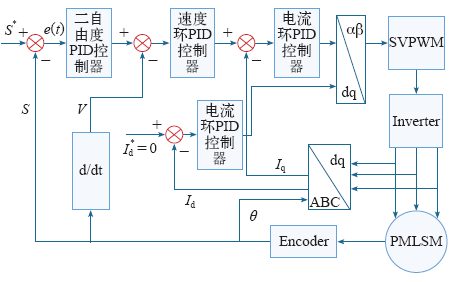
图4
永磁同步直线电机控制系统
Fig.4
Permanent magnet synchronous linear motor control system
图5
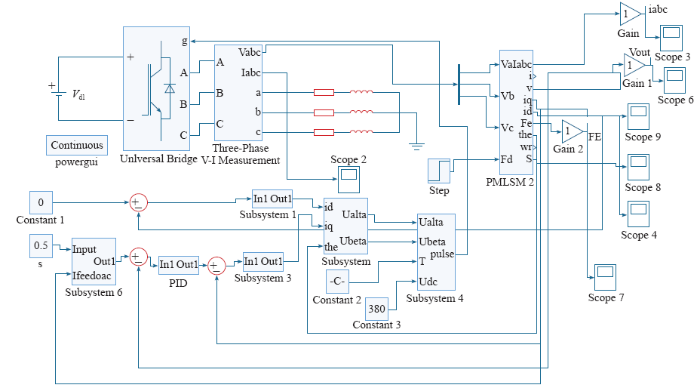
图5
基于遗传算法的PMSLM控制系统模型
Fig.5
The PMSLM control system model based on genetic algorithm
仿真实验的过程及结果如下:
实验一过程中,给定位置信号s = 0.5m,电机空载运行,采用传统Ziegler–Nichols整定法,获得的控制参数值分别为Kp = 80、Ki = 4、Kd = 0.003,此时,该PMSLM控制系统获得的位置跟随曲线结果如图6所示。
图6
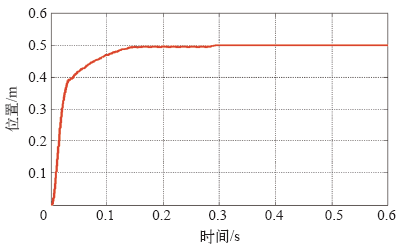
图6
空载时,传统PID控制下电机的位置曲线
Fig.6
Motor position curve based on traditional PID under no-load condition
图7
实验三过程中,在干扰情况下,进行了遗传算法和传统PID控制方法下的PMSLM对比仿真实验。其模型如图8所示。
图8
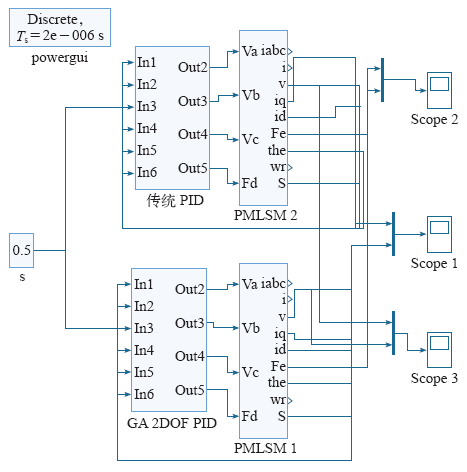
图8
基于遗传和传统算法的对比控制仿真模型
Fig.8
Motor contrast control simulation model under genetic and traditional algorithm
图9
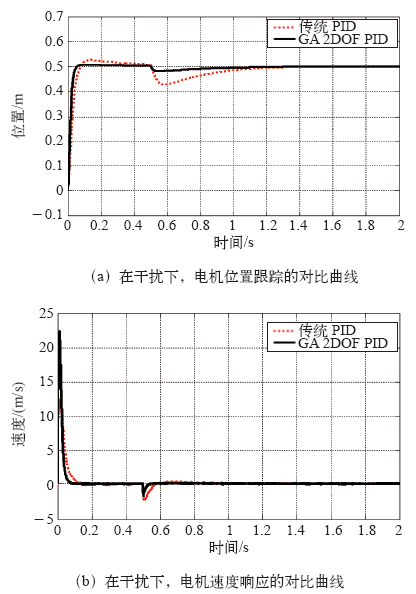
图9
在干扰下,电机位置跟踪和电机的速度响应对比曲线
Fig.9
Motor position tracking contrast curve and Motor speed of response contrast curve under the disturbance
5 结论
本文采用在传统PID控制器的基础上增加目标设定值滤波器的方法,建立了一种二自由度PID控制器,并采用遗传算法对该二自由度PID控制器的参数进行优化,得到了一组最优的参数值Kp = 101.147 8,Ki = 2.430 9,Kd = 0.166 7;接着,分别在空载和干扰情况下,将本文算法和传统PID算法进行了仿真对比实验,实验结果和响应曲线证明了本文基于遗传二自由度的优化算法能使永磁同步直线电机控制系统的设定值跟随随性能和干扰抑制特性达到共优。
参考文献
永磁直线同步电机推力波动约束
[J].Force ripples such as slot force, end force and normal force are key factor which affect the properties of permanent magnet linear synchronous motor(PMLSM). In order to obtain a high speed and high precision direct driver system, a finite element model of PMLSM is created and the slot force is analysed firstly. The slot force curve is fitted and obtained using Fourier series secondly. Then, a current predictive model is designed to compensate the thrust ripple due to the slot force. Furthermore, a disturbance observer is designed to compensate the thrust ripples due to other elements. Experiments demonstrate that the compensating control theory and analysis method are effective, and the obtained formula can be utilized to compensate thrust ripples in practical application and improve the motion performance of PMLSM.
Thrust ripple suppression for permanent magnet linear synchronous motor
[J].Force ripples such as slot force, end force and normal force are key factor which affect the properties of permanent magnet linear synchronous motor(PMLSM). In order to obtain a high speed and high precision direct driver system, a finite element model of PMLSM is created and the slot force is analysed firstly. The slot force curve is fitted and obtained using Fourier series secondly. Then, a current predictive model is designed to compensate the thrust ripple due to the slot force. Furthermore, a disturbance observer is designed to compensate the thrust ripples due to other elements. Experiments demonstrate that the compensating control theory and analysis method are effective, and the obtained formula can be utilized to compensate thrust ripples in practical application and improve the motion performance of PMLSM.
基于参数辨识的PMSM电流环在线自适应控制
[J].In vector control system of PMSM, current controller performance will decline significantly because of changes in motor parameters, an on-line adaptive control of PMSM current-loop based on parameter identification is proposed. First stator resistance and permanent magnet flux linkage are identified using recursive least squares method with forgetting factor, and then d-q axis inductance are estimated using the same method base on the previous step, finally the PI parameters in real-time operating conditions could be obtained. Experimental results show that PI parameters can effectively adapt to change in working conditions and quickly achieve precise control of current.
On-line adaptive control of PMSM current-loop based on parameter indentification
[J].In vector control system of PMSM, current controller performance will decline significantly because of changes in motor parameters, an on-line adaptive control of PMSM current-loop based on parameter identification is proposed. First stator resistance and permanent magnet flux linkage are identified using recursive least squares method with forgetting factor, and then d-q axis inductance are estimated using the same method base on the previous step, finally the PI parameters in real-time operating conditions could be obtained. Experimental results show that PI parameters can effectively adapt to change in working conditions and quickly achieve precise control of current.
An adaptive sliding mode control scheme for induction motor drives
[J].
DOI:10.1016/j.isatra.2019.08.061
URL
PMID:31495590
[本文引用: 1]

The high-performance Direct Torque Control (DTC) requires accurate knowledge of flux and speed information. Furthermore, the elimination of sensors leads to reduced overall cost and size of the electric drive system and subsequently improving its reliability. This paper proposes an effective sensorless direct torque control scheme for induction motor drive. The proposed scheme consists of enhancing the decoupling structure and variable estimation as well. Therefore, an enhanced direct flux and torque control based on feedback linearization is implemented in one hand. This allows obtaining a linear decoupled control together with minimized flux and torque ripples. In another hand, a combined sliding mode observer and model reference adaptive system is associated with the control scheme as sensorless algorithms for rotor speed and flux estimation. This conjunction is intended to enhance the sliding mode observer performances especially at low speed operations and reduce its sensitivity to noise and system uncertainties as well. The effectiveness of the proposed control algorithm has been verified through simulation and experimental work using MATLAB/Simulink software and dSpace 1104 implementation board respectively.
PMSM伺服系统参数自适应全局滑模变结构位置控制器设计
[J].
Parameters adaptive global SMC position controller for PMSM servo system
[J].
PMSM stabilizer design based on backstepping
[C].
直驱阀用音圈电机的模糊非线性PID控制
[J].The hydrodynamic force disturbances in direct drive valve based on voice coil motor (VCM-DDV) have greater impact on system performance. There are some weaknesses in classic Proportion integration differentiation(PID)control. In this paper, a mathematical model of the VCM-DDV is established. A double-closed loop control structure composed of position loop and current loop is presented. A novel nonlinear PID (NLPID) control strategy is applied in position loop. Fuzzy control is used to achieve self-tuning of control parameters. The design method of NLPID controller in position loop is presented in detail. Simulation and experimental results show the control strategy has a better anti-interference and robustness, superior stability and dynamic performance than classic PID and fuzzy PID in the same disturbance.
A fuzzy nonlinear PID control of voice coil motor used in direct drive valve
[J].The hydrodynamic force disturbances in direct drive valve based on voice coil motor (VCM-DDV) have greater impact on system performance. There are some weaknesses in classic Proportion integration differentiation(PID)control. In this paper, a mathematical model of the VCM-DDV is established. A double-closed loop control structure composed of position loop and current loop is presented. A novel nonlinear PID (NLPID) control strategy is applied in position loop. Fuzzy control is used to achieve self-tuning of control parameters. The design method of NLPID controller in position loop is presented in detail. Simulation and experimental results show the control strategy has a better anti-interference and robustness, superior stability and dynamic performance than classic PID and fuzzy PID in the same disturbance.
异步电动机间接磁场定向的二自由度鲁棒控制器
[J].It is well known that the system performance of an induction motor with indirect field oriented control degrades under the variation of rotor resistance and in the presence of external load disturbance, and the shortage of the conventional robust control approaches in considering robust stability and robust performance simultaneously is introduced briefly. In order to solve these problems, Youla parameterization based two-degree-of-freedom controller using robust design method is studied, the feedback controller is design using H∞ mixed sensitivity to guarantee the robust stability and performance of feedback closed loop. The H2 optimization based feedforward controller is design to obtain the robust performance of tracking even under model error. Simulation results demonstrate that the proposed approaches can improve the system performance under plant parameter variation and external disturbance.
Two degree of freedom robust controller of induction motor with indirect feild oriented
[J].It is well known that the system performance of an induction motor with indirect field oriented control degrades under the variation of rotor resistance and in the presence of external load disturbance, and the shortage of the conventional robust control approaches in considering robust stability and robust performance simultaneously is introduced briefly. In order to solve these problems, Youla parameterization based two-degree-of-freedom controller using robust design method is studied, the feedback controller is design using H∞ mixed sensitivity to guarantee the robust stability and performance of feedback closed loop. The H2 optimization based feedforward controller is design to obtain the robust performance of tracking even under model error. Simulation results demonstrate that the proposed approaches can improve the system performance under plant parameter variation and external disturbance.
Two degree of freedom control using recurrent fuzzy neural networks for a class of nonlinear discrete time time delay systems
[C].
Analytical formulas for the new two degree of freedom smith predictor
[C].
基于谐振控制的表贴式永磁同步电机弱磁区电流谐波抑制
[J].This paper presents a PIR(proportional integral resonate) current control method for SPMSM(surface permanent magnet synchronous motors) in overmodulation range. The proposed method can effectively reduce THD(total harmonic distortion) of current and the torque ripple in the flux-weakening overmodulation region. In this paper, the mechanism of the disturbance rejection by the conventional method is analyzed, and a novel PIR controlled method is proposed to improve the ability of the system to reject period disturbance signals. Numerical simulations and experiments with a 7-kW prototype are carried out. The results show that the proposed method can effectively reduce harmonic current and torque ripple.
Current harmonic suppression in the Flux-weakening control of surface permanent magnet synchronous motors using resonant controllers
[J].This paper presents a PIR(proportional integral resonate) current control method for SPMSM(surface permanent magnet synchronous motors) in overmodulation range. The proposed method can effectively reduce THD(total harmonic distortion) of current and the torque ripple in the flux-weakening overmodulation region. In this paper, the mechanism of the disturbance rejection by the conventional method is analyzed, and a novel PIR controlled method is proposed to improve the ability of the system to reject period disturbance signals. Numerical simulations and experiments with a 7-kW prototype are carried out. The results show that the proposed method can effectively reduce harmonic current and torque ripple.
HF test current injection based self-sensing control of PMSM for low and zero speed rang using two-degree-of freedom current control
[C].
基于遗传算法的内埋式永磁同步电机参数辨识方法
[J].On account of the reverse salient pole characteristic and defects of the traditional parameter identification method, this article puts forward a parameter identification method based on genetic algorithms combine with the mathematical model of the motor. This method can identify the four parameters in same time such as the stator resistance, the d-axis inductance, the q-axis inductance and the permanent magnet flux. The signal used in the method are all can be directly detected the state variables so it can reduce the influence of the other disturbance on the motor parameters identification and improve the accuracy of the parameter identification. Simulation and experimental results show that the genetic algorithm to identify the parameters has a strong robustness and convergence. Four pending identification parameters can converge to the true value in a relatively short time and has a high accuracy no matter in the different speeds, loads and control strategies. It also overcomes the drawback of high requirements in the initial parameter values which in the commen genetic algorithm to identify.
Parameter identification of interior permanent magnet synchronous motors based on genetic algorithm
[J].On account of the reverse salient pole characteristic and defects of the traditional parameter identification method, this article puts forward a parameter identification method based on genetic algorithms combine with the mathematical model of the motor. This method can identify the four parameters in same time such as the stator resistance, the d-axis inductance, the q-axis inductance and the permanent magnet flux. The signal used in the method are all can be directly detected the state variables so it can reduce the influence of the other disturbance on the motor parameters identification and improve the accuracy of the parameter identification. Simulation and experimental results show that the genetic algorithm to identify the parameters has a strong robustness and convergence. Four pending identification parameters can converge to the true value in a relatively short time and has a high accuracy no matter in the different speeds, loads and control strategies. It also overcomes the drawback of high requirements in the initial parameter values which in the commen genetic algorithm to identify.
Optimization of induction motor control using genetic algorithms
[C].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}