

1 引言
伺服系统在数控机床、航空航天、军用武器随动系统以及机器人等领域具有极其广泛的应用[1⇓⇓-4]。近年来,永磁同步电机因高转矩电流比、转矩波动小、调速范围广等优点在工业领域获得了广泛应用[5-6]。随着科技的发展,工程中对于伺服控制系统的快速性、准确性和控制参数易于整定的需求也不断增加,另外在实际应用中永磁同步电机(Permanent magnet synchronous motor, PMSM)作为一个非线性、强耦合的时变复杂系统,会遭遇外部扰动(负载转矩的变化)和内部扰动(参数摄动)等干扰,使得PMSM控制技术一直都是研究热点。针对以上问题,学者们进行了大量研究,一方面,继续以经典的比例-积分-微分(Proportional-integral- derivative, PID)控制器为基础,研究控制参数的自整定[7]、参数辨识[8]等,另一方面则试图将一些先进的控制算法,如滑模变结构控制、自适应控制以及预测控制[9⇓⇓-12]等,应用在PMSM伺服系统中。
针对控制对象的外部和内部扰动,韩京清[13]在PID控制思想的基础上提出了自抗扰控制器(Active disturbance rejection control, ADRC)。ADRC将被控对象的各种不确定因素包括内部扰动和外部扰动归结为总扰动,采用扩张状态观测器(Extended state observer, ESO)对总扰动进行估计,然后进行扰动补偿。ADRC具有超调量小、精度高、抗干扰能力强和不严重依赖模型的特点,目前已经在电力系统、化工过程、精密加工机床等领域得到了推广和应用[14⇓⇓-17]。但由于ADRC采用了非线性函数,需要整定的参数过多,稳定性难以分析,限制了ADRC的工业应用前景。GAO[18]将ADRC进行了线性化处理,提出了线性自抗扰控制器(Linear active disturbance rejection control, LADRC),并提出了基于时间尺度的整定方法,将LESO和状态反馈的设计转化为控制器带宽(
本文将线性自抗扰控制理论应用于伺服驱动系统,设计了电流环一阶LADRC控制器、速度环一阶LADRC控制器以及位置环二阶LADRC控制器。其中,位置控制系统采用双环的结构,实现了位置和速度的复合精准控制,给出了相应的参数整定方法,与传统的伺服系统相比,需要调试的参数大大减少,并通过试验对LADRC的控制性能进行了研究。
2 线性自抗扰控制原理
以二阶系统为例,二阶系统微分方程一般形式为
式中,
将估计不准的部分
式中,
式中,x为列向量形式。其中
对该系统可建立线性扩张状态观测器(ESO)
式中,z为对x观测状态向量;
由式(6)中两式相减得到
该微分方程的解为
将
这里将该系统三个极点配置在相同位置,则该矩阵的特征多项式为
式中,
通过解式(9)可得
在观测器对总扰动f (即x3)进行观测之后,即可对控制器进行扰动补偿
式中,u为补偿后的输出,将补偿后的u代入式(2),得到
至此,包含扰动的二阶系统被化简为一个不含扰动的二阶系统。对于二阶系统,使用PD控制器设计
式中,r为参考值,一般为定值,则
配置上式极点为
得到PD参数值
式中,
3 伺服电机系统线性自抗扰控制器设计
3.1 电流环控制器设计
伺服系统dq轴电流表达式如式(17)所示
式中,以q轴电流控制为例实现线性自抗扰控制,uq相当于输入,称为u,
由于控制电流微分方程为一阶,在这里采用一阶线性自抗扰控制器。其原微分方程为
式中,b可根据实际测量获得,也可以进行估计,这里用b0作为b的估计值。其他估计不准的部分也可并入
令
可将微分方程化为状态空间方程
式中,
对该系统可建立线性扩张状态观测器(ESO)
由前文可知
展开上式为
在观测器对总扰动
式中,
对于一阶系统,使用P控制器设计
将上式写成传递函数形式为
式中,
3.2 速度环控制器设计
速度环经常会面临PMSM参数不确定、负载转矩变化等扰动。
根据电机动力学模型
式中,w为电机转速,
由微分方程可以得到速度环控制与电流环具有类似的形式,同样为一阶微分方程。其中电流
3.3 位置环控制器设计
位置环控制同样可以看成由速度控制的一阶微分方程
位置环的LADRC设计同样可以采用前文所述一阶LADRC设计理论进行设计。
4 仿真分析
为了验证前文所提算法的性能,在永磁同步电机伺服控制系统中对算法进行仿真分析,仿真中所使用的PMSM参数如表1所示。
表1 PMSM仿真参数
| 参数 | 参数值 |
|---|---|
| 额定功率/W | 2 400 |
| 额定转速/(r/min) | 3 000 |
| 额定电流/A | 12 |
| 转矩系数/(N·m/A) | 0.625 |
| 相电阻/Ω | 0.145 |
| 永磁体磁链/Wb | 0.171 |
| 相电感/mH | 0.983 |
| 极对数 | 4 |
| 转动惯量/(kg·m2) | 1.857×10-4 |
仿真系统采用电流环、速度环、位置环三环闭环控制。各控制参数如表2所示。
表2 控制系统三环控制参数
| 参数 | 参数值 |
|---|---|
| 电流环系统增益b0 | 1 017.3 |
| 电流环LESO观测器带宽ω0/rad | 2 500 |
| 电流环控制器KP | 500 |
| 速度环系统增益b0 | 920.8 |
| 速度环LESO观测器带宽ω0/rad | 250 |
| 速度环控制器KP | 50 |
| 位置环系统增益b0 | 1 |
| 位置环LESO观测器带宽ω0/rad | 50 |
| 位置环控制器KP | 10 |
下面对比LADRC与PI控制器在电流环、转速环、位置环的控制效果。
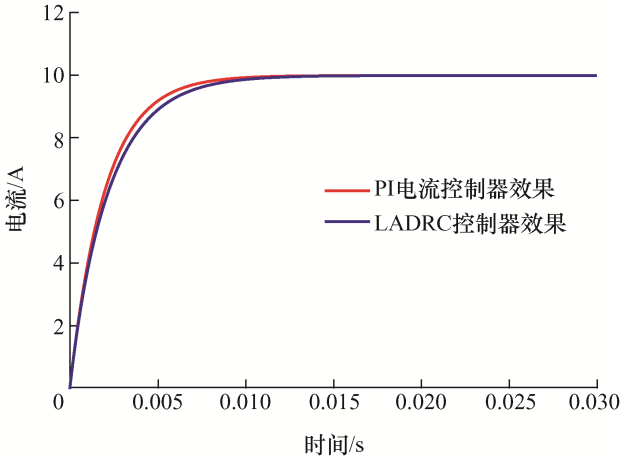
首先对比LADRC电流控制器与PI电流控制器的电流控制效果。如图1所示,阶跃电流幅值命令设为10 A,当LADRC电流环带宽与PI电流环带宽相同时,两种控制器的电流控制效果几乎等价,因此可以优先考虑PI控制器,以减少电流环计算量。
图1
保持上述LADRC和PI电流控制器参数不变,增加LADRC和PI速度控制器,并将LADRC和PI控制器的速度环带宽调节至相近,则基于PI电流环、速度环的转速控制效果;基于LADRC电流环、速度环的转速控制效果;基于LADRC速度环和PI电流环的转速控制效果如图2所示。
图2
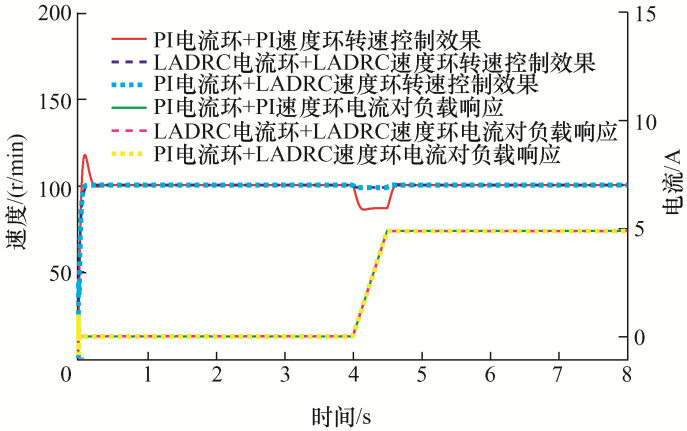
为了测试LADRC和PI速度控制器对扰动的鲁棒性,在t=4 s时开始增加电机负载,则电机电流也随之增加。如图2所示,随着负载和电流的爬升,基于PI速度控制器的转速有明显波动,而基于LADRC转速控制器的转速控制结果展现出明显的抗干扰性。
保持上述LADRC和PI控制器参数不变,增加LADRC和PI位置控制器,则基于PI电流、速度、位置控制器的位置环控制效果;基于LADRC电流、转速、位置控制器的位置环控制效果;基于LADRC电流、位置控制器和PI速度控制器的位置环控制效果如图3所示。
图3
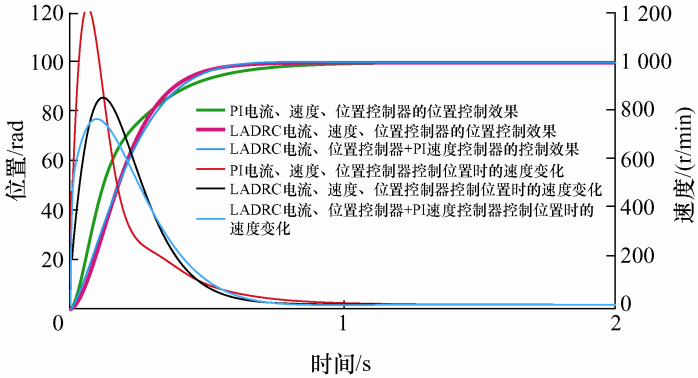
图4
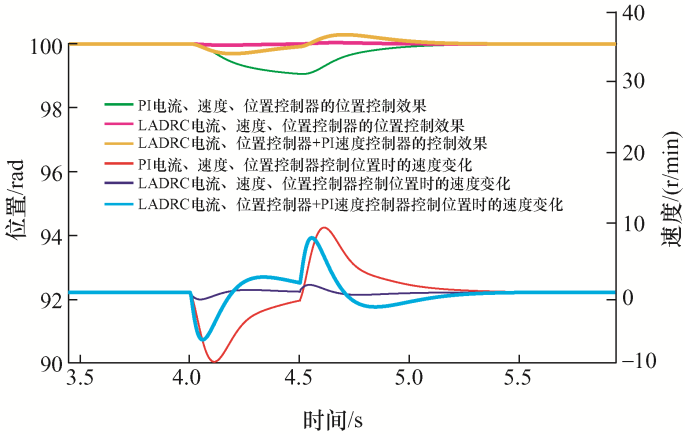
如图4所示,基于LADRC的三环控制对扰动具有很强的鲁棒性,在扰动下位置波动和转速波动都最小。基于LADRC电流、位置控制器和PI速度控制器的三环控制对扰动具有一定的鲁棒性。基于PI的三环控制对扰动的鲁棒性最弱。因此基于LADRC位置控制相对于PI控制器的位置控制也有明显的优势。
5 结论
本文将线性自抗扰控制理论应用在永磁同步电机控制系统中,给出了电流环、速度环和位置环的LADRC控制器设计方法。并通过分析仿真结果的方式探究了LADRC与PI控制器相互组合对伺服电机位置控制的影响,从仿真结果中得出以下结论。
(1) LADRC与PI作为电流内环效果几乎等价。
(2) 对于速度环与位置环而言,LADRC控制器的动态性能和对扰动的鲁棒性相对PI控制器具有明显的优势。
参考文献
永磁同步电机位置伺服系统改进变结构自抗扰控制
[J].
An improved variable structure active disturbance rejection control for the permanent magnet synchronous motor position servo system
[J].
基于自抗扰的快速刀具伺服系统复合控制
[J].
Composite control based on active disturbance rejection for a fast tool servo system
[J].
改进自抗扰的PMSM双环伺服系统控制研究
[J].
Improved active disturbance rejection PMSM dual-loop servo system control research
[J].
Performance control of PMSM drives using a self-tuning PID
[C]//
On-line parameter identification for vector controlled PMSM drives using adaptive algorithm
[C]//2008 IEEE Vehicle Power and Propulsion Conference. Harbin,
Nonlinear speed control for PMSM system using sliding-mode control and disturbance compensation techniques
[J].DOI:10.1109/TPEL.2012.2206610 URL [本文引用: 1]
Combined speed and current terminal sliding mode control with nonlinear disturbance observer for PMSM drive
[J].DOI:10.1109/ACCESS.2018.2840521 URL [本文引用: 1]
A new design of PMSM robust current controller based on model-free adaptive control strategy
[C]//
Robust model predictive control for a three-phase PMSM motor with improved control precision
[J].DOI:10.1109/TIE.41 URL [本文引用: 1]
基于线性自抗扰技术的舰炮伺服系统仿真研究
[J].
Simulating investigation on naval gun servo system based on LADRC
[J].
An energy saving,factory-validated disturbance decoupling control design for extrusion processes
[C]//
Scaling and parameterization based controller tuning
[C]//
自抗扰与改进ESO并联的永磁同步电机矢量控制
[J].
Vector control of permanent magnet synchronous motor based on auto disturbance rejection and improved ESO
[J].
非最小相位系统的改进自抗扰控制及参数整定方法
[J/OL].
Improved active disturbance rejection control and parameter tuning method for non-minimum phase systems
[J/OL].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}