

1 引言
随着现代控制理论的发展,为解决传统PI控制器的不足,大量学者开始结合现代控制理论研究新的控制器,如神经网络控制、预测控制、模糊控制、滑模控制(Sliding mode control,SMC)等[3⇓⇓-6];从首次提出到现在,经过长期的发展,SMC一直是控制领域无法绕开的话题。SMC也被称为变结构控制,因其对系统自身参数变化和外部扰动不敏感,具有响应快速、鲁棒性强和容易实现的优点,广泛应用于PMSM控制系统中,而且其控制的优越性也得到了证实[7]。但是传统SMC仍然存在问题,一是在满足稳定性条件下,必须使滑模切换增益大于系统不确定项的上界,这样会造成SMC产生严重的抖动[8]。二是由于传统SMC采取的滑模面是线性的,所以会存在收敛速度慢的问题,只有在时间趋于无穷时,误差才会收敛到零[9-10]。
在解决传统SMC问题的研究过程中,国内外学术专家付诸了很多的努力,也取得了诸多的研究成果。针对滑模抖振问题,研究发现是由于系统状态轨迹在滑模面上做高频切换运动而产生的,为了抑制因抖振产生的影响,文献[11]提出了一种基于新型变速趋近律的滑模控制器,选取变带宽的趋近方式,能够很好地抑制稳态转矩脉动。文献[12]提出采用可变边界层的饱和函数取代传统的符号函数来抑制抖振,虽然抖振在一定程度上能够得到抑制,但系统的响应速度比较慢。文献[13]提出采用分数阶终端滑模控制,并设计基于半正定屏障函数的自适应控制,对不确定扰动的上界进行估计来削弱不确定性因素对系统的影响,可以保证跟踪误差在有限时间得到收敛,避免过高的控制增益估计且削弱了系统抖振。文献[14]提出一种新型的模糊滑模速度控制器,通过系统状态量到达滑模面的距离和滑模增益来设定模糊规则,使得滑模趋近速度可以进行动态调整,然后选取连续的sigmoid函数取代不连续的符号函数,让系统可以进行平滑切换,提高了控制系统的响应速度并且增强了控制系统的抗干扰能力。
本文在模糊滑模控制的基础上,提出了一种改进的算法。一是在全局快速终端滑模控制的基础上,根据文献[20]所提趋近律,设计了一种新的复合趋近律,很大程度上提高了系统的收敛速度,为抑制抖振问题,采用将饱和函数放入幂次项中,实现了和幂次趋近律相同的性质,抖振也能得到很好的抑制。二是根据线性化反馈技术,以误差函数导数的绝对值为补偿构建了自适应干扰估计项,并将估计结果作为补偿传递到速度控制器,避免开关增益的使用,试验仿真表明,本文所设计速度控制器能使电机转动抖振得到有效削弱,电机控制系统的动态响应能力和稳定性得到提高。
2 PMSM数学模型
三相永磁同步电机是一种非线性、强耦合的多变量系统,并且结构较为复杂,为了便于分析,常常将三相PMSM看为理想型电机,同时满足理想条件。为了方便控制器的设计,需要选取合适的坐标变换对三相PMSM的数学模型进行解耦和降阶变换,本文采取同步旋转坐标系对其进行解耦与降阶,故PMSM的数学模型在d-q旋转坐标系下可以表示为
式中,
3 新型复合趋近律的设计与分析
3.1 传统滑模趋近律
一般来说,传统滑模控制器的设计主要有两个部分,一是滑模面的选取,二是趋近律的选择,前者保证系统误差的收敛,而后者则保证滑模趋近运动的动态品质。传统滑模趋近律通常选择高为炳院士提出的指数趋近律,如下所示
式中,
假设系统状态在t时刻到达滑模面,对式(2)在0到t进行积分可得到达时间t为
式中,
由式(3)可知,若要减小到达滑模面的时间,则需要增大
3.2 新型复合趋近律
基于上述指数趋近律的缺点,本文提出了一种新型复合趋近律
式中,
相比于符号函数,采用饱和函数可以保证在边界层里面使用线性控制,在边界层外面使用切换控制,从而可以抑制由于滑模面切换运动所带来的抖动。
由式(4)可知,新型复合趋近律由三部分构成,当系统状态远离滑模面时,
为验证所提趋近率的效果,在Simulink中进行仿真,不同趋近率下滑模函数的收敛过程如图1所示。
图1
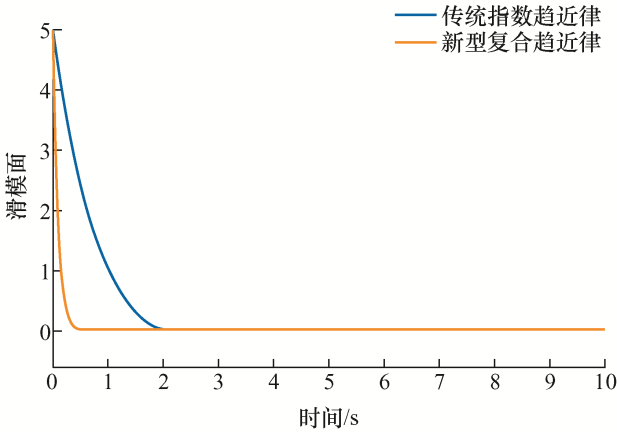
由图1可知,与传统指数趋近律相比,新型复合趋近律的趋近速度和响应速度有明显的提升。
4 自适应全局快速终端模糊滑模控制器的设计与分析
4.1 传统滑模控制器
定义电机系统的状态变量为
式中,
根据式(1)和式(6)可知
定义
传统滑模控制一般选取滑模面为
式中,
选取指数趋近率使PMSM驱动系统具有较好的动态品质,故控制器的表达式为
式中,
q轴参考电流可由传统的滑模控制器获得
由滑模到达条件
4.2 全局快速终端滑模控制器
由于传统滑模控制器通常使用线性超平面,误差无法快速收敛至零界点。基于线性滑模表面和快速终端吸引子设计全局快速终端滑模控制器,以保证控制系统在有限时间内从任意初始状态迅速达到平衡状态。
定义全局快速终端滑模面函数为
式中,
在系统状态趋近于平衡点的情况下,收敛时间的确定由
联立式(7)、式(12)和式(13)可得全局快速终端滑模控制器(Global fast terminal sliding mode controller,GFTSMC)的表达式为
GFTSMC采取转速误差为状态变量构建滑模面,当转速误差沿滑模面运动到平衡点时,可以得到q轴参考电流。
加入新型复合趋近率得到速度控制器表达式为
4.3 稳定性证明
构建李雅普诺夫函数
故有
根据李亚普洛夫稳定性定理,全局快速终端滑模控制器是稳定的。
4.4 自适应扰动估计
由于在电机运转过程中,伴随着不确定项,除了外部负载带来的扰动之外,还有自身内部参数的变化带来的扰动,为了便于分析,用
式中,
考虑扰动之后,根据式(15)设计滑模控制器为
由式(19)可知,将扰动当作已知量反馈到控制率中,当出现外部扰动时,控制器可以及时响应扰动的变化。
由于扰动
为消除系统抖振,
设基础的模糊系统由IF-THEN形式的模糊规则构成R(j):IF
选取乘积推理机、单值模糊器和中心平均解模糊器,则模糊系统的输出为
式中,
引入模糊向量
式中,
根据线性化反馈技术,并且采用模糊系统逼近,本文使用积分的方法对
在估计值
根据模糊逼近理论,自适应模糊系统可以实现使逼近误差非常小。因此
基于模糊理论设计如下系统。
根据模糊规则,以
式中,NB、
图2
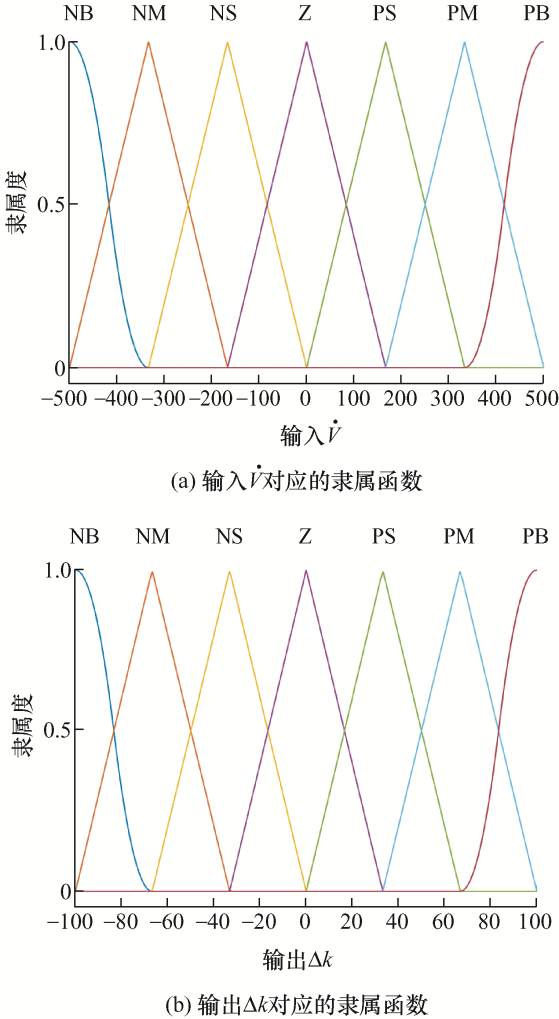
为了使估计值更靠近真实值,设计如下的模糊规则,如表1所示。为了使PMSM系统迅速调节到稳定状态,应该快速增大
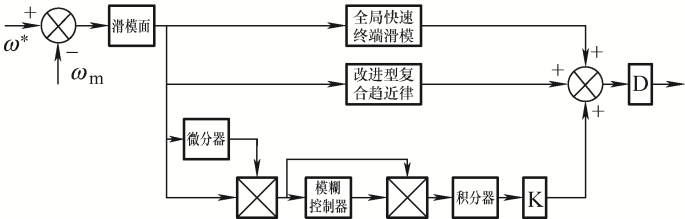
综上所述,自适应全局快速终端模糊滑模控制器(Adaptive global fast terminal fuzzy sliding mode controller,AGFTFSMC)结构图如图3所示。
图3
5 超螺旋滑模观测器的设计
由于传统滑模观测器观测的反电动势带有不连续的高频信号,这些高频信号的滤除过程会影响观测精度[21],故本文采用超螺旋滑模观测器代替传统滑模观测器。
超螺旋算法的数学表达式如下
式中,
式中,
式(27)所述系统中,由于原点是一个平衡点,所以该点在全局上具有逐渐趋近稳定的特性,故系统经过一段时间后,其状态变量的值将会趋向于零,并最终稳定在原点处。系统状态的稳定性可以通过控制系统的设计和参数调整来实现。
超螺旋滑模观测器设计如下所示
当超螺旋滑模观测器的估计误差到达滑模面时,可以得出估计值约等于真实值,即
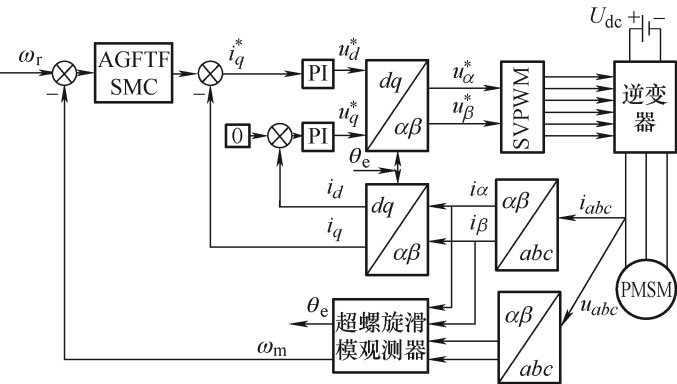
本文采用反正切函数来获得转子位置。永磁同步电机整体控制框图如图4所示。
图4
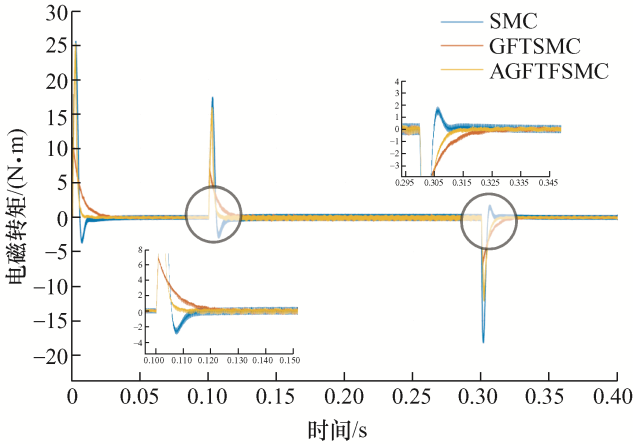
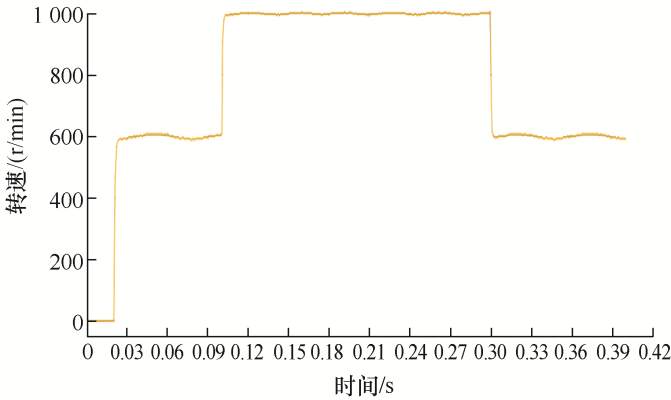
6 试验仿真及结果分析
6.1 仿真验证
在Matlab/Simulink中进行仿真研究,以验证本文所提改进算法的有效性,下面对SMC、GFTSMC、AGFTFSMC三种控制方式进行仿真对比试验,仿真中均采用超螺旋滑模观测器来获得转速和转子位置信息。
试验仿真中采用固定步长ode3算法,且固定步长时间设定为2×10-7 s,仿真时间设定为1 s,永磁同步电机参数如表2所示。
表2 永磁同步电机参数
| 参数 | 数值 |
|---|---|
| 永磁体磁链φf/Wb | 0.175 |
| 定子电感Ls/H | 0.008 5 |
| 额定电压Udc/V | 311 |
| 定子电阻Rs/Ω | 2.875 |
| 额定转速 | 1 000 |
| 转动惯量 | 0.003 |
| 极对数 | 4 |
图5
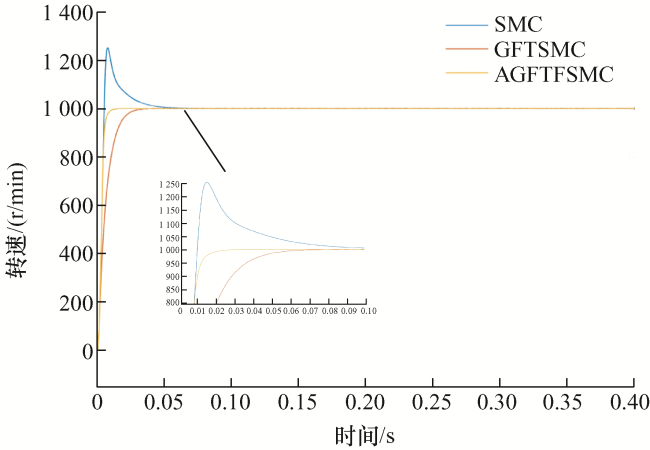
图6
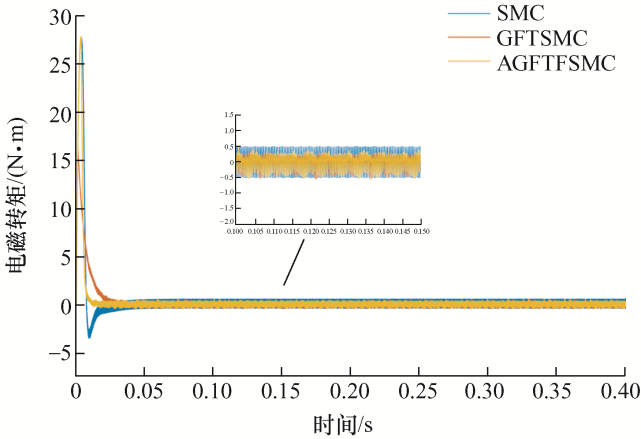
图7
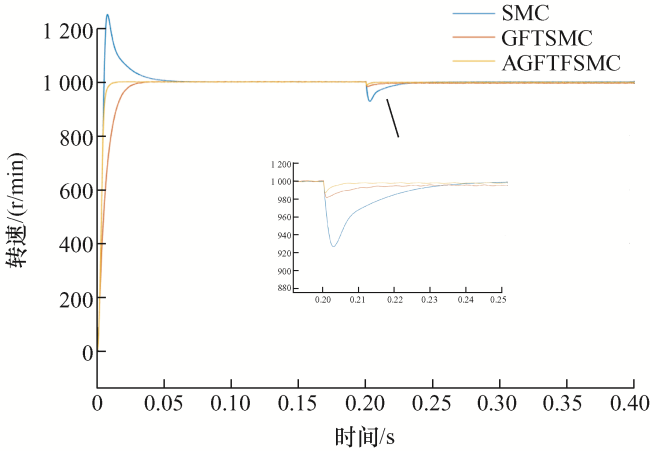
图8
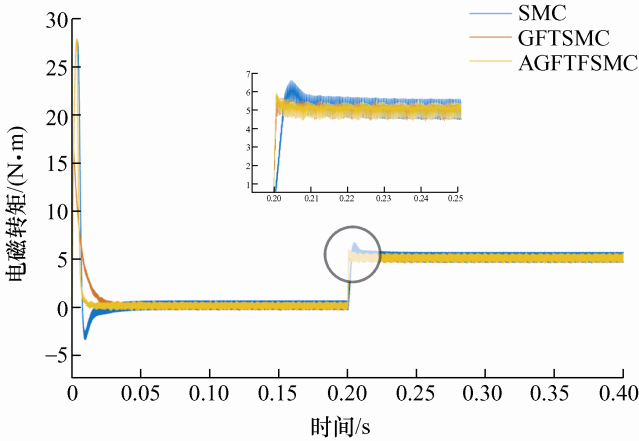
图9
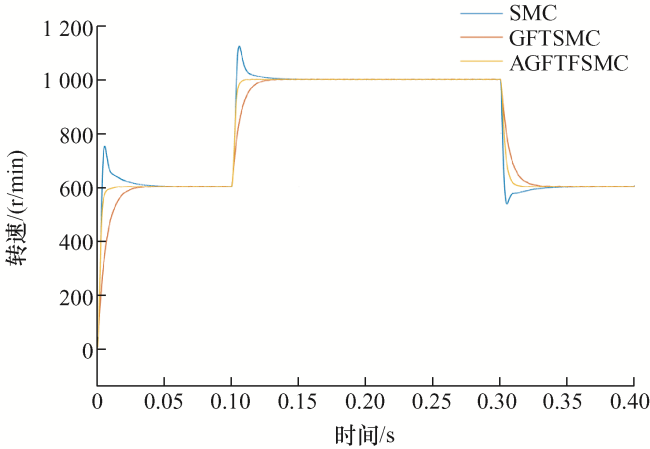
图10
6.2 试验验证
为了验证所提自适应模糊滑模控制器的可靠性,搭建永磁同步电机控制试验平台,如图11所示。该试验平台以TI公司TMS320F28335数字芯片为控制芯片,试验系统为模块化设计,共有三个主要部件组成,分别为DSP核心模块、IPM功率模块、电机试验平台。
图11
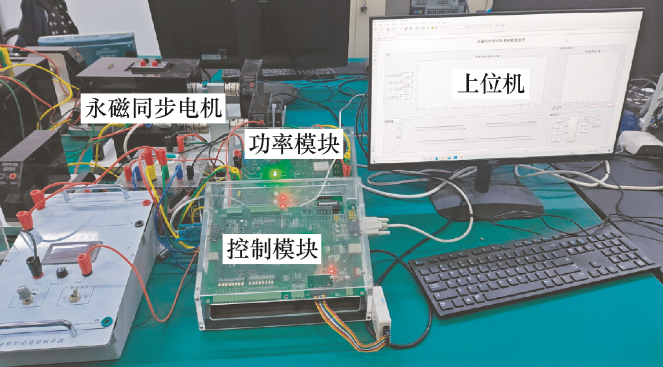
图12
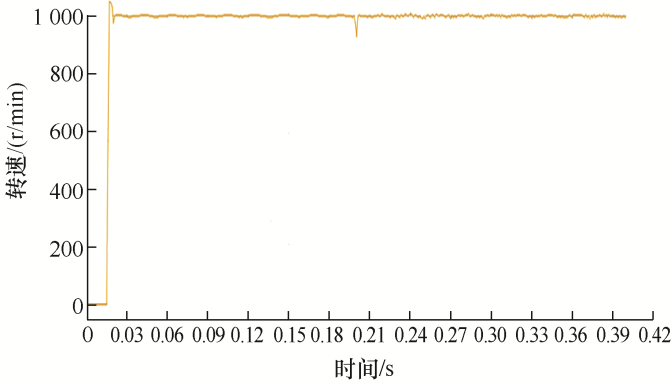
图13
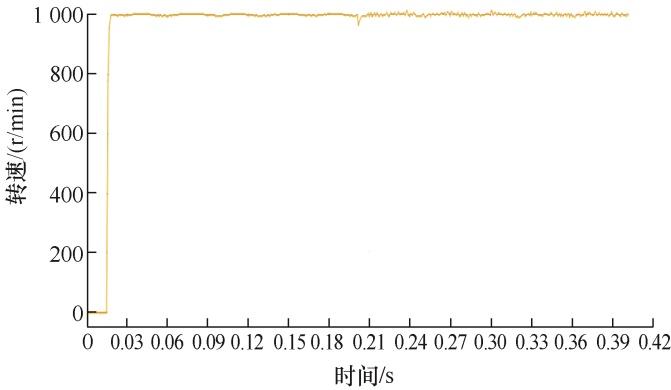
图14
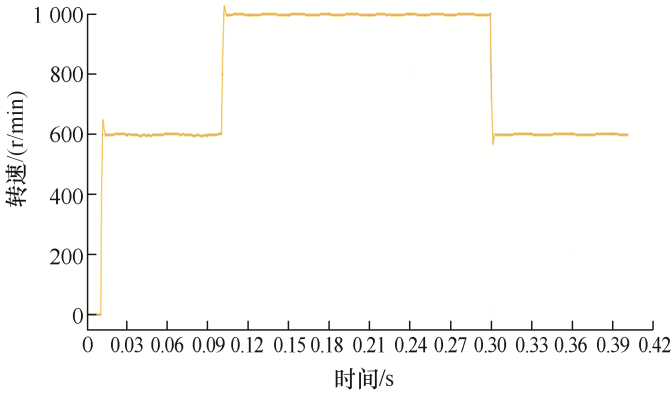
图15
7 结论
本文在全局快速终端滑模控制的基础上,设计改进型复合趋近律,结合模糊滑模控制,提出新型滑模控制器。并结合超螺旋滑模观测器进行了仿真试验,结论如下所述。
(1) 所提新型复合趋近律可以大幅缩短到达滑模面的趋近时间,并有效抑制滑模抖动,提高系统动态响应速度。
(2) 以函数导数绝对值构建的自适应扰动估计项,将扰动估计值反馈补偿到控制器中,加强了系统的抗扰能力。
(3) 试验结果表明,AGFTFSMC能应对各种工况,在抑制系统抖动的同时,转速没有出现超调,提高了系统的响应速度,改善了观测器的跟踪效果,超螺旋滑模观测器的观测精度得到提高,系统的抗扰动性能也得到加强,具有更优的动态性能。
参考文献
Saturated adaptive control of electrohydraulic actuator with parametric uncertainty and load disturbance
[J].
表贴式永磁同步电机转速环复合PI无位置传感器控制
[J].
Sensorless control of surface mounted permanent magnet synchronous motor with speed ring compound PI
[J].
基于Elman神经网络的永磁直线同步电机互补滑模控制
[J].
Complementary sliding mode control of permanent magnet linear synchronous motor based on Elman neural network
[J].
基于PID型代价函数的永磁同步电机模型预测电流控制
[J].
Current control prediction of permanent magnet synchronous motor based on PID cost function
[J].
基于改进的滑模控制器和观测器的SPMSM控制
[J].
SPMSM control based on improved sliding mode controller and observer
[J].
感应电机电流环非线性积分滑模控制策略
[J].
Nonlinear integrated sliding mode control strategy for current loop of induction motor
[J].
双绕组永磁同步电机滑模变结构控制
[J].
Sliding mode variable structure control of double-winding permanent magnet synchronous motor
[J].
基于改进切换增益自适应率的欠驱动USV滑模轨迹跟踪控制
[J].
Sliding mode trajectory tracking control of underactuated USV based on improved switching gain adaptive rate
[J].
Sliding mode control in dynamic systems
[J].DOI:10.1080/00207179208934270 URL [本文引用: 1]
Simplified finite control set-model predictive control for matrix converter-fed PMSM drives
[J].DOI:10.1109/TPEL.2017.2696902 URL [本文引用: 1]
基于新型趋近律和混合速度控制器的IPMSM调速系统滑模变结构控制
[J].
Sliding mode variable structure control of IPMSM speed control system based on new approach law and hybrid speed controller
[J].
永磁同步电机无传感器控制的软开关滑模观测器
[J].
Sliding mode observer of soft switch for sensorless control of permanent magnet synchronous motor
[J].
永磁直线同步电机自适应分数阶终端滑模控制
[J].
Adaptive fractional terminal sliding mode control of permanent magnet linear synchronous motor
[J].
永磁同步电机模糊滑模速度控制器设计
[J].
Design of fuzzy sliding mode speed controller for permanent magnet synchronous motor
[J].
一种多幂次滑模趋近律设计与分析
[J].
Design and analysis of a multi-power sliding mode reaching law
[J].
永磁同步电机新型指数型自适应滑模观测器无传感器控制
[J].
Novel sensorless control of permanent magnet synchronous motor with exponential adaptive sliding mode observer
[J].
Robust ADRC for nonlinear time-varying system with uncertainties
[J].
永磁同步电机优化模型预测转矩控制
[J].
Improved model predictive torque control of permanent magnet synchronous motor
[J].
Nonlinear observer for tightly coupled integrated inertial navigation aided by RTK-GNSS measurements
[J].DOI:10.1109/TCST.87 URL [本文引用: 1]
一种可抑制逆变器非线性影响的永磁同步电机无位置传感器控制策略
[J].
A sensorless control strategy for permanent magnet synchronous motors that can suppress the nonlinear effects of inverters
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}