1 引言
锂离子电池因其比能量高、自放电小等优点,被广泛用作电动汽车的动力电池[1 ] 。为了提高锂离子电池的利用率,保障电动汽车的运行安全,电池管理系统必须获取精确的电池荷电状态(State of charge,SOC)数据[2 ⇓ ⇓ -5 ] 。SOC表示电池使用一段时间或长期搁置不用后的剩余容量与额定容量的比值,常用百分数表示。SOC的大小无法直接进行测量,并且易受电池工作电流、电压和温度等因素的影响。因此,SOC的准确估计是电动汽车能否快速发展的重要因素之一[6 ] 。
为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] 。安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大。开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计。神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] 。卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计。目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] 。无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理。相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] 。
但是使用EKF和UKF估计SOC时,将系统噪声和测量噪声视为常数处理,不符合电池工作的实际情况[19 ] 。当电池工作环境发生变化时,周围的噪声会随着环境的变化而变化。针对在噪声影响多变的情况中SOC估计精度差的问题,本文采用Sage-Husa自适应算法与UKF相结合,提出了一种改进型的SH-AUKF算法,在估计过程中不断更新状态协方差和噪声协方差,以获得更加准确的SOC估计结果。此外,在改进算法中加入蒙特卡洛采样方法,进一步提高了算法的估计精度。
2 电池等效电路模型
2.1 建立电池状态空间模型
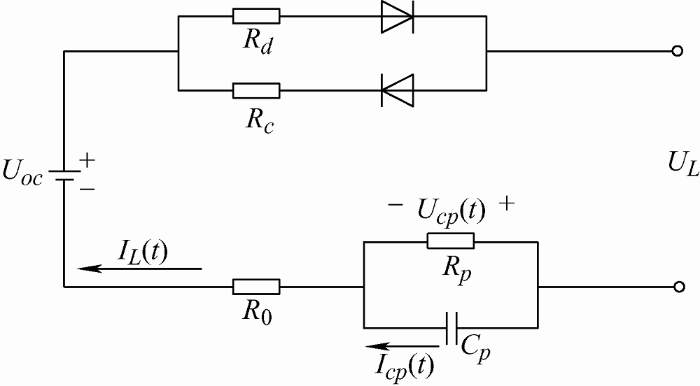
合适的电池模型是使用卡尔曼滤波法估计SOC的重要前提。目前,常用的电池等效电路模型有内阻模型、Thevenin模型、二阶RC模型以及PNGV模型。其中,Thevenin模型作为经典的电路模型,由于其简单、准确而被广泛使用。但是,Thevenin模型由于未考虑充电和放电过程中电池内阻的变化,忽略了充放电对电池容量的影响。为了更加准确地描述电池的充放电特性,在Thevenin模型的基础上增加了两个内阻,分别表示充电和放电过程中的电池内阻,如图1 所示。
图1
图1 中,$ U_{o c}$ $R_{0}$ $R_{p}$ $C_{p}$ $R_{d}$ $R_{c}$ $U_{L}$ $ I_{L}(t)$ $ I_{c p}(t)$ $C_{p}$ $ U_{c p}(t)$ $C_{p}$ $R_{d}$ $R_{c}$ $ R_{c d}(t)$ $R_{d}$ $R_{c}$ $ R_{c d}(t) = R_{d}$ $ R_{c d}(t) = R_{c}$
(1) $ I_{L}(t) \cdot\left[R_{0}+R_{c d}(t)\right]+U_{c p}(t)=U_{o c}-U_{L} $
(2) $ I_{L}(t)=I_{c p}(t)+\frac{U_{c p}(t)}{R_{p}}$
(3) $ I_{c p}(t)=C_{p} \cdot \frac{\mathrm{d} U_{c p}(t)}{\mathrm{d} t}$
设定等效电路模型中极化电容$ C_{p}$ $ U_{c p}(t)$
(4) $ \begin{array}{c} {\left[R_{0}+R_{c d}(t)\right] \cdot C_{p} \cdot \frac{\mathrm{d} U_{c p}(t)}{\mathrm{d} t}+} \\ {\left[1+\frac{R_{L}+R_{c d}(t)}{R_{p}}\right] \cdot U_{c p}(t)=U_{o c}-U_{L}} \end{array}$
(5) $\operatorname{SOC}(t)=\operatorname{SOC}\left(t_{0}\right)-\frac{1}{Q_{0}} \int_{t_{0}}^{t} \eta \cdot I_{L}(t) \mathrm{d} t$
(6) $E_{m}(t)=f[\operatorname{SOC}(t)]$
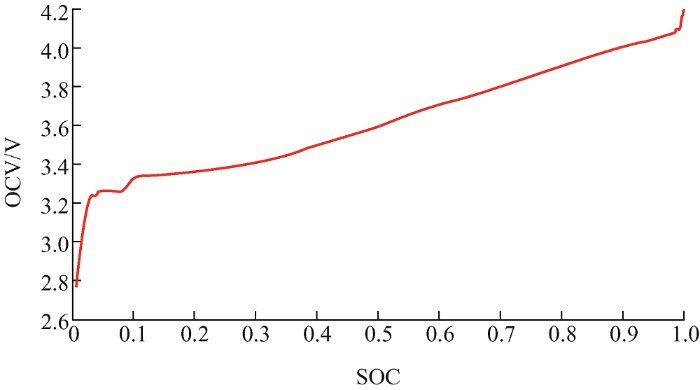
式中,$\operatorname{SOC}(t)$ t 时刻的SOC;$\eta $ $Q_{0}$ $f[\operatorname{SOC}(t)]$ 表1 所示。电池的开路电压与SOC之间的关系曲线如图2 所示。
图2
通过Matlab自带的Curve Fitting曲线拟合工具箱,得到SOC-OCV的多项式拟合关系
(7) $\begin{array}{c} U_{o c}(\mathrm{SOC})=2.641+1.714 \cdot x-3.512 \cdot x^{2}+ \\ 5.708 \cdot x^{3}-5.068 \cdot x^{4}+1.867 \cdot x^{5} \end{array}$
式中,$ U_{o c}(\mathrm{SOC})$ x 为电池荷电状态。将式(1)~(6)线性化、离散化处理,得到电池的状态方程为
(8) $ \begin{array}{l} \left[\begin{array}{c} \operatorname{SOC}(k+1) \\ U_{c p}(k+1) \end{array}\right]=\left[\begin{array}{cc} 1 & 0 \\ 0 & \exp \left(-\frac{\Delta t}{R_{p} C_{p}}\right)\end{array}\right] \cdot\left[\begin{array}{c} \operatorname{SOC}(k) \\ U_{c p}(k) \end{array}\right]+\\ \left[\begin{array}{c} -\frac{\Delta t}{Q_{0}} \\ R_{p}\left[1-\exp \left(-\frac{\Delta t}{R_{p} C_{p}}\right)\right] \end{array}\right] \cdot I_{L}(k)+\left[\begin{array}{c} \omega_{1}(k) \\ \omega_{2}(k) \end{array}\right] \end{array}$
(9) $\begin{array}{c} U_{L}(k)=f[\operatorname{SOC}(k)]- \\ {\left[c+R_{c d}(t)\right] \cdot I_{L}(k)-U_{c p}(k)+v(k)} \end{array}$
式中,k 代表每一个时刻;$\left[\mathrm{SOC}(k), \quad U_{c p}(k)\right]^{\mathrm{T}}$ $ I_{L}(k)$ $ U_{L}(k)$ $\omega_{1}(k)$ $\omega_{2}(k)$ $ v(k)$
2.2 电池模型参数辨识
在SOC估计前,需要对第2.1节中考虑充放电过程的Thevenin模型的相关参数$ R_{0}$ $ R_{p}$ $ C_{p}$ $ R_{c}$ $ R_{d}$
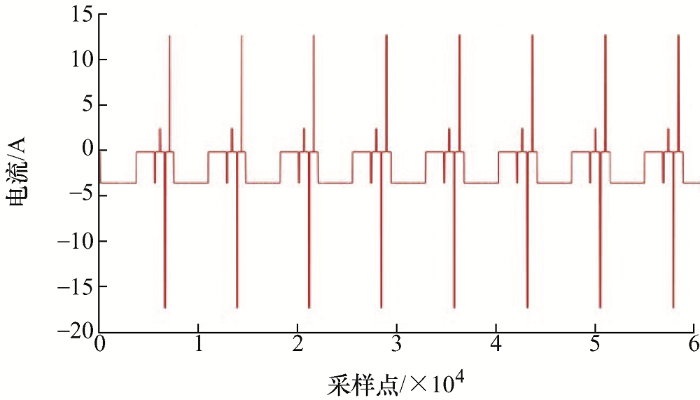
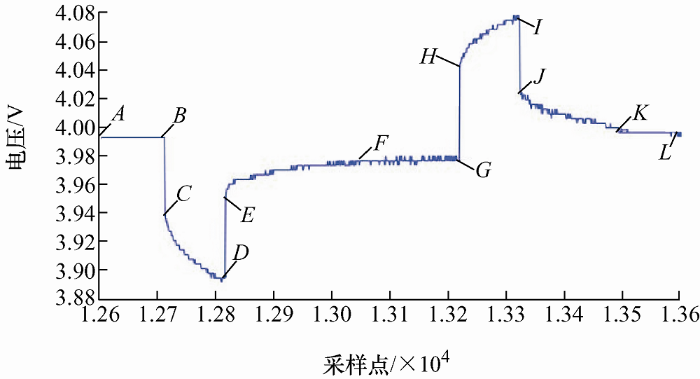
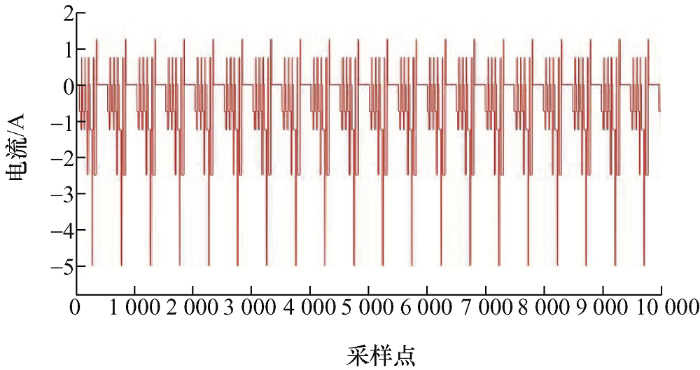
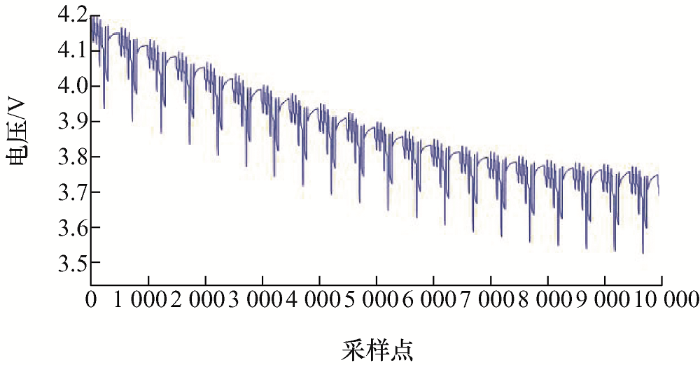
试验数据采用IEEE-DataPort网站公开的HPPC测试数据集进行参数辨识。该数据集在25 ℃室温环境下,对容量为3.2 A·h的18650型锂离子电池进行HPPC测试试验。充电和放电电流一般维持在1C (3.2 A)左右,瞬时最大充电电流可达4C (12.8 A)左右,瞬时最大放电电流可达5C (16 A)左右。每隔500 ms采集一次数据。电流变化曲线如图3 所示,电压变化曲线如图4 所示。选取任意SOC的电压脉冲曲线进行分析,如图5 所示。
图3
图4
图5
(1) 欧姆内阻。由图5 可知,AB 段为电池在静置状态的电压,即电池的电动势$ E_{m}$ BC 段表示电池在放电脉冲电流激励下,由于欧姆内阻$ R_{0}$ I ,可得欧姆内阻$ R_{0}$
(10) $R_{0}=\frac{U_{B}-U_{C}}{I}$
(2) 充放电内阻。针对充放电内阻的差异,去除公共欧姆内阻部分,可得充放电过程中的内阻差异。如图5 所示,DE 段表示在脉冲放电结束后,由于欧姆内阻的特性引起的电池端电压的瞬时快速上升。结合欧姆内阻$ R_{0}$ $ R_{d}$
(11) $R_{d}=\frac{U_{E}-U_{D}}{I}-R_{0}$
IJ 段表示在脉冲充电结束后,由于欧姆内阻的特性引起的电池端电压的瞬时快速下降。结合欧姆内阻$ R_{0}$ $ R_{c}$
(12) $R_{c}=\frac{U_{I}-U_{J}}{I}-R_{0}$
(3) 等效RC参数辨识。图5 中,CD 段由于极化效应的影响,电池的端电压在快速下降之后有一个缓慢下降的过程。EF 段表示电池静置,电压在RC 回路的影响下发生回弹。在整个脉冲放电过程中,极化RC 回路所处的状态可以看作是零状态响应,由此可知
(13) $ U_{p}=I R_{p}\left[1-\exp \left(-\frac{t}{\tau}\right)\right]$
(14) $ R_{p}=\frac{U_{F}-U_{E}}{I}$
式中, $ \tau=R_{p} C_{p}$ $ R_{p}$ $ C_{p}$
(15) $ C_{p}=\frac{\tau }{ R_{p}}$
运用最小二乘算法对模型的参数进行辨识和更新,辨识结果如表2 所示。
将式(7)与$ R_{0}$ $ R_{p}$ $ C_{p}$ $ R_{c}$ $ R_{d}$
3 基于SH-AUKF算法的锂离子电池荷电状态估计
UKF估计SOC时,需要提前设定系统的过程噪声和测量噪声。一般情况下,过程噪声和测量噪声被设置为定值。但是在实际中,电动汽车的运行状况和周围环境复杂多变,系统的过程噪声特性和测量噪声特性往往是未知的,甚至是时变的。如果噪声预设值与实际噪声特征不匹配,将产生较大的误差。为了降低系统噪声对SOC估计精度的影响,需要对系统噪声进行自适应估计。Sage-Husa自适应滤波算法由于计算量小、自适应效果好等优点,被广泛应用于噪声估计领域。本文将Sage-Husa自适应滤波算法与UKF相结合,在估计SOC的同时自适应估计系统噪声,提高SOC的估计精度。
3.1 UKF算法
UKF采用非线性无迹变换(UT)迭代技术,将确定的离散采样点直接逼近状态的后验分布。同时在迭代过程中,更新非线性模型的状态协方差和测量协方差。应用UKF在线估计SOC时,需要对式(8)和式(9)作如下处理,令
(16) ${{x}_{k}}=\left[ \begin{matrix} SOC(k) \\ {{U}_{cp}}(k) \\ \end{matrix} \right]$
(17) ${{A}_{k}}=\left[ \begin{matrix} 1 & 0 \\ 0 & \exp \left( -\frac{\Delta t}{{{R}_{p}}{{C}_{p}}} \right) \\ \end{matrix} \right]$
(18) ${{B}_{k}}=\left[ \begin{matrix} -\frac{\Delta t}{{{Q}_{0}}} \\ {{R}_{p}}\left[ 1-\exp \left( -\frac{\Delta t}{{{R}_{p}}{{C}_{p}}} \right) \right] \\ \end{matrix} \right]$
(19) ${{u}_{k}}=\left[ {{I}_{L}}(k) \right]$
(20) ${{y}_{k}}=\left[ {{U}_{L}}(k) \right]$
(21) ${{\omega }_{k}}=\left[ \begin{matrix} {{\omega }_{1}}(k) \\ {{\omega }_{2}}(k) \\ \end{matrix} \right]$
(22) ${{\nu }_{k}}=\left[ \nu (k) \right]$
加入系统过程噪声和测量噪声后,非线性电池动态系统模型状态方程和测量方程可表示为
(23) ${{x}_{k}}=f({{x}_{k-1}},{{u}_{k}})+{{\omega }_{k}}={{A}_{k}}\cdot {{x}_{k}}+{{B}_{k}}\cdot {{u}_{k}}+{{\omega }_{k}}$
(24) $\begin{matrix} {{y}_{k}}=g({{x}_{k}},{{u}_{k}})+{{v}_{k}}= \\ f[SOC(k)]-[{{R}_{L}}+{{R}_{cd}}(t)]\cdot {{u}_{k}}-{{U}_{cp}}(k)+v(k) \\ \end{matrix}$
式中,${{y}_{k}}$ ${{u}_{k}}$ f 为系统的状态函数;g 为系统的观测函数;${{\omega }_{k}}$ ${{v}_{k}}$ ${{\omega }_{k}}$ ${{v}_{k}}$ ${{Q}_{k}}$ ${{R}_{k}}$
(1) 初始化系统状态变量${{x}_{0}}$ ${{\bar{x}}_{0}}$ ${{P}_{0}}$
(25) ${{\bar{x}}_{0}}=E\text{(}{{x}_{0}}\text{)}$
(26) ${{P}_{0}}=E\text{ }\!\![\!\!\text{ (}{{x}_{0}}-{{\bar{x}}_{0}}\text{)(}{{x}_{0}}-{{\bar{x}}_{0}}{{\text{)}}^{\text{T}}}\text{ }\!\!]\!\!\text{ }$
(27) $\left\{ \begin{matrix} {{x}_{0,k-1}}={{{\hat{x}}}_{k-1}}\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \\ {{x}_{i,k-1}}={{{\hat{x}}}_{k-1}}+{{\text{(}\sqrt{\text{(}n+\lambda \text{)}{{P}_{k-1}}}\text{)}}_{i}}\ \ \ \ i=1n\ \ \ \ \ \ \ \\ {{x}_{i,k-1}}={{{\hat{x}}}_{k-1}}-{{\text{(}\sqrt{\text{(}n+\lambda \text{)}{{P}_{k-1}}}\text{)}}_{i}}\ \ \ \ i=n+12n \\ \end{matrix} \right.$
(28) $\left\{ \begin{matrix} \omega _{m}^{(0)}=\frac{\lambda }{n+\lambda }\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \\ \omega _{c}^{(0)}=\frac{\lambda }{n+\lambda }+1+\beta -{{\alpha }^{2}}\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \\ \omega _{m}^{(i)}=\omega _{c}^{(i)}=\frac{1}{2(n+\lambda )}\ \ \ \ i=1,2,\cdots,2n \\ \end{matrix} \right.$
式中,${{\omega }_{m}}$ 、${{\omega }_{c}}$ 分别为均值和方差的权重;n 是状态向量的维数;$\beta $ $\beta =2$ $\alpha $ $1\times \text{1}{{\text{0}}^{-4}}\le \alpha \le 1$ $\lambda $
(29) $\lambda ={{\alpha }^{2}}(n+\kappa )-n$
式中,$\kappa $
(3) 状态变量时间更新。每个Sigma点通过状态函数传递,计算得到$k$
(30) ${{x}_{i,k|k-1}}=f\text{(}{{x}_{i,k-1}},{{u}_{k}}\text{)}\ \ \ \ \ \ \ i=02n$
(31) ${{\hat{x}}_{k|k-1}}=\sum\limits_{i=0}^{2n}{\omega _{m}^{(i)}f({{x}_{i,k-1}},{{u}_{k}})}+{{q}_{k-1}}$
(32) ${{P}_{k|k-1}}=\sum\limits_{i=0}^{2n}{\omega _{c}^{(i)}({{x}_{i,k|k-1}}-{{{\hat{x}}}_{k|k-1}})}{{({{x}_{i,k|k-1}}-{{\hat{x}}_{k|k-1}})}^{\text{T}}}+{{Q}_{k-1}}$
式中,${{q}_{k-1}}$ ${{\hat{x}}_{k|k-1}}$ k -1时刻的状态值对k 时刻状态值的预测。
(4) 测量变量时间更新。每个Sigma点也通过测量函数传递,计算得到$k$
(33) ${{y}_{i,k|k-1}}=g({{x}_{i,k|k-1}},{{u}_{k}})$
(34) ${{\hat{y}}_{k|k-1}}=\sum\limits_{i=0}^{2n}{\omega _{m}^{(i)}g({{x}_{i,k|k-1}},{{u}_{k}})+{{r}_{k-1}}}$
式中,${{r}_{k-1}}$
(35) ${{K}_{k}}={{P}_{xy,k}}\cdot {{({{P}_{y,k}})}^{-1}}$
(36) $\left\{\begin{array}{l}\boldsymbol{P}_{y, k}=\sum_{i=0}^{2 n} \omega_{c}^{(i)}\left(\boldsymbol{y}_{i, k \mid k-1}-\hat{\boldsymbol{y}}_{k \mid k-1}\right)\left(\boldsymbol{y}_{i, k \mid k-1}-\hat{\boldsymbol{y}}_{k \mid k-1}\right)^{\mathrm{T}}+\boldsymbol{R}_{k-1} \\\boldsymbol{P}_{x y, k}=\sum_{i=0}^{2 n} \omega_{c}^{(i)}\left(\boldsymbol{x}_{i, k \mid k-1}-\hat{\boldsymbol{x}}_{k \mid k-1}\right)\left(\boldsymbol{y}_{i, k \mid k-1}-\hat{\boldsymbol{y}}_{k \mid k-1}\right)^{\mathrm{T}}\end{array}\right.$
(6) 更新$k$
(37) ${{\hat{x}}_{k}}={{\hat{x}}_{k|k-1}}+{{K}_{k}}({{y}_{k}}-{{\hat{y}}_{k|k-1}})$
(38) ${{P}_{k}}={{P}_{k|k-1}}-{{K}_{k}}{{P}_{y,k}}K_{k}^{\text{T}}$
k 时刻的状态变量估计值更新完成后,即可从${{\hat{x}}_{k}}$ k 时刻的SOC估计值。
3.2 AUKF算法
UKF估计SOC时,状态噪声协方差${{Q}_{k}}$ ${{R}_{k}}$ ${{Q}_{k}}$ ${{R}_{k}}$
(39) ${{Q}_{k}}={{Q}_{k-1}}+{{d}_{k-1}}({{K}_{k}}{{\varepsilon }_{k}}\varepsilon _{k}^{\text{T}}K_{k}^{\text{T}}+{{P}_{k}}-{{P}_{k|k-1}})$
(40) ${{R}_{k}}={{R}_{k-1}}+{{d}_{k-1}}({{\varepsilon }_{k}}\varepsilon _{k}^{\text{T}}-{{P}_{y,k}})$
(41) ${{\varepsilon }_{k}}={{y}_{k}}-{{\hat{y}}_{k|k-1}}$
(42) ${{d}_{k}}=(1-b){{(1-{{b}^{k+1}})}^{-1}}$
式中,${{d}_{k}}$ b 为遗忘因子,取值范围通常为0.95~0.99。
3.3 基于Sage-Husa的自适应UKF算法
在实际应用中,很多系统模型的观测噪声和激励噪声方差无法被确定,并且存在一系列的外来干扰因素,导致数学模型会发生变动。针对上述问题,Sage和Husa提出了Sage-Husa自适应滤波算法。Sage-Husa自适应滤波算法可以对噪声的变化量进行实时调整,有效滤除不规律扰动变量的影响,提高算法的抗干扰能力。
结合Sage-Husa噪声估计器和AUKF算法的优点,提出了一种改进型自适应算法——SH-AUKF算法。新算法在AUKF算法的基础上,引入Sage-Husa噪声估计器。在实时修正协方差矩阵${{Q}_{k}}$ ${{R}_{k}}$ ${{q}_{k}}$ ${{r}_{k}}$
(1) 计算状态方程中噪声${{q}_{k}}$
(43) ${{\bar{q}}_{k}}=(1-{{d}_{k}}){{\bar{q}}_{k-1}}+{{d}_{k}}({{\hat{x}}_{k}}-\sum\limits_{i=0}^{2n}{\omega _{m}^{(i)}\cdot f({{x}_{i,k-1}},{{u}_{k}})})$
(2) 计算状态方程中噪声的协方差${{\bar{Q}}_{k}}$
(44) $\begin{matrix} {{{\bar{Q}}}_{k}}=(1-{{d}_{k}}){{{\bar{Q}}}_{k-1}}+{{d}_{k}}\cdot [{{K}_{k}}{{\varepsilon }_{k}}\varepsilon _{k}^{\text{T}}K_{k}^{\text{T}}+{{P}_{k}}- \\ \sum\limits_{i=0}^{2n}{\omega _{c}^{(i)}\cdot ({{x}_{i,k|k-1}}-{{{\hat{x}}}_{k|k-1}})}{{({{x}_{i,k|k-1}}-{{{\hat{x}}}_{k|k-1}})}^{\text{T}}}] \\\end{matrix}$
(3) 计算测量方程中噪声${{r}_{k}}$
(45) ${{\bar{r}}_{k}}=(1-{{d}_{k}}){{\bar{r}}_{k-1}}+{{d}_{k}}({{y}_{k}}-\sum\limits_{i=0}^{2n}{\omega _{m}^{(i)}\cdot g({{x}_{i,k|k-1}},{{u}_{k}})})$
(4) 计算测量方程中噪声的协方差${{\bar{R}}_{k}}$
(46) $\begin{matrix} {{{\bar{R}}}_{k}}=(1-{{d}_{k}}){{{\bar{R}}}_{k-1}}+{{d}_{k}}\cdot [{{\varepsilon }_{k}}\varepsilon _{k}^{\text{T}}- \\ \sum\limits_{i=0}^{2n}{\omega _{c}^{(i)}\cdot ({{y}_{i,k|k-1}}-{{{\hat{y}}}_{k|k-1}})}{{({{y}_{i,k|k-1}}-{{{\hat{y}}}_{k|k-1}})}^{\text{T}}}] \\\end{matrix}$
将上述${{\bar{q}}_{k}}$ ${{\bar{Q}}_{k}}$ ${{\bar{r}}_{k}}$ ${{\bar{R}}_{k}}$
3.4 蒙特卡洛方法的运用
为了进一步提高新算法的估计精度和可靠性,引入了蒙特卡洛方法(Monte Carlo method)。蒙特卡洛方法是一种以概率统计理论为指导的数值计算方法。
在SOC估计过程中,对每一个时刻的SOC进行1 000次重复估计采样。最后,对每一个时刻的1 000次采样数据求算数平均值,作为该时刻最终的SOC近似估计值。每一个时刻的SOC近似估计值为
(47) ${{\bar{\hat{x}}}_{k}}=\frac{\sum\limits_{j=1}^{1\ 000}{x_{k}^{(j)}}}{1\ 000}$
式中,${{\bar{\hat{x}}}_{k}}$ k 个时刻的SOC估计值。在SOC估计时,加入蒙特卡洛方法,可以进一步减小随机噪声对估计结果的影响。同时,也降低了先验估计不准确对后验估计的影响。
4 仿真试验
国内外有许多研究机构开展过关于锂离子电池的动态工况测试试验,并将试验数据集公开发布在网上。本文采用马里兰大学先进生命周期工程中心的一组锂离子电池动态应力测试(Dynamic stress test,DST)工况数据集。该试验数据集通过模拟实际电动汽车行驶工况中的电流激励来获取锂离子电池的动态工作特性。在25 ℃环境下,18650型锂离子电池DST工况的电流动态特性如图6 所示,电压动态特性如图7 所示。图6 中,正电流表示电池充电,负电流表示电池放电。
图6
图7
4.1 未加入蒙特卡洛方法的SOC估计
基于锂离子电池DST工况试验数据,对本文所提出的SH-AUKF算法的估计效果进行验证,SOC初始值为1。同时,将UKF、AUKF、SH-AUKF三种算法的估计效果进行对比。
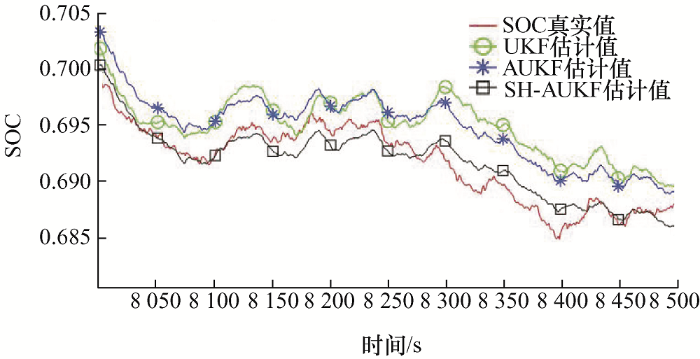
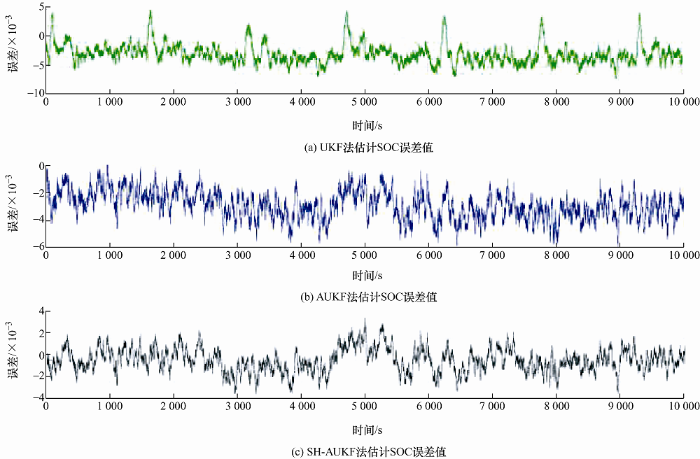
DST工况下,UKF、AUKF、SH-AUKF估计SOC的结果如图8 所示,估计误差曲线如图9 所示。
由图8 可知,UKF、AUKF和SH-AUKF均可准确、有效地估计SOC。从图9 中可以看出,UKF的估计误差在-6×10-3 到5×10-3 区间内;AUKF的估计误差在-6×10-3 到1×10-3 区间内,SH-AUKF的估计误差稳定在±3×10-3 区间内。对三种算法的估计误差和精度做进一步分析可知,与UKF相比,SH-AUKF的估计精度提高了45.4%;与AUKF相比,SH-AUKF的估计精度提高了14.3%。
图8
图9
为了更直观地比较三种算法对SOC的估计效果,本文引入了最大误差值(Max error)、平均绝对误差值(Mean absolute error,MAE)和均方根误差值(Root mean square error,RMSE)对三种算法进行综合评价,如表3 所示。
表3 中,Max error为最大绝对误差值,表示一组数据中测量值与真值的最大偏离量;MAE为绝对误差的平均值,该指标更好地反映了预测值误差的实际情况;RMSE是观测值与真值偏差的平方和与观测次数N 比值的平方根,用来衡量观测值同真值之间的偏差。
对于Max error、MAE、RMSE三种指标,数值越小,证明算法的估计效果越好。UKF、AUKF、SH-AUKF三种算法的指标分析如下。
其中,E UKF 、E AUKF 、E SH-AUKF 表示不同指标下的误差值。综上所述,SH-AUKF对SOC的估计误差最小,并且准确性和稳定性优于UKF和AUKF。
4.2 加入蒙特卡洛方法的SOC估计
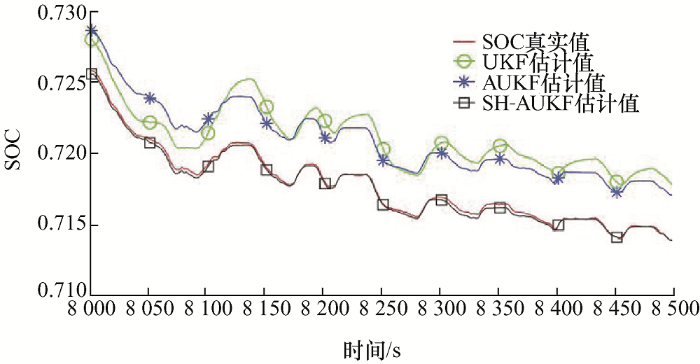
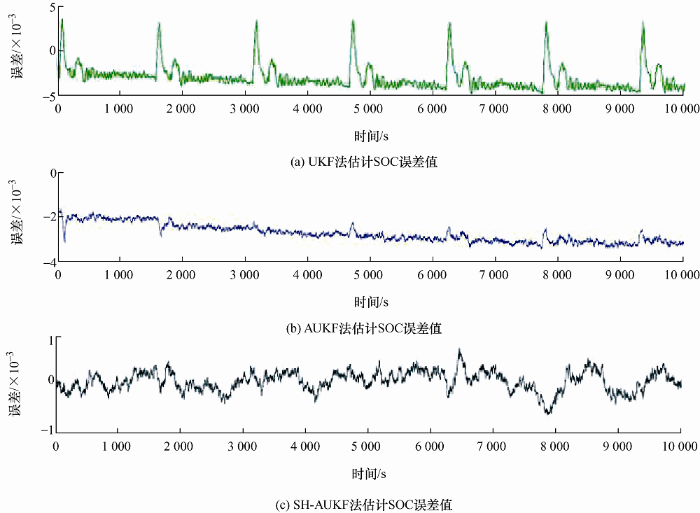
将SH-AUKF算法与蒙特卡洛采样定理相结合,在估计SOC的过程中,对每一个时刻的SOC估计值进行1 000次重复采样。三种算法对SOC的估计曲线如图10 所示,估计误差曲线如图11 所示。Max Error、MAE和RMSE的指标数据如表4 所示。
图10
图11
如图10 所示,加入蒙特卡洛方法后,UKF、AUKF、SH-AUKF三种算法估计SOC的曲线更为平滑,有效地减小了噪声对SOC估计的影响。从图11 中可以看出,UKF的估计误差在±5×10-3 区间内;AUKF的估计误差的区间为-3.5×10-3 到-2×10-3 ;SH-AUKF的估计误差在±1×10-3 区间内。
如表4 所示,加入蒙特卡洛方法后,UKF、AUKF、SH-AUKF三种算法的指标分析如下。
其中,E UKF 、E AUKF 、E SH-AUKF 表示不同指标下的误差值。相较于UKF和AUKF,SH-AUKF对SOC的估计误差更小,精度更高,体现了Sage-Husa自适应算法的优越性。
为了说明蒙特卡洛方法的优势,对第4.1节和4.2节中的SH-AUKF估计SOC的数据进行了比较分析,如表5 和表6 所示。其中,方案一为未加入蒙特卡洛方法的试验数据,方案二为加入蒙特卡洛方法的试验数据。
如表5 和表6 所示,加入蒙特卡洛方法后,SH-AUKF的估计误差区间缩小了66.6%;Max error减小了82.1%;MAE减小了81.2%;RMSE减小了50%。因此,在SOC估计中引入蒙特卡洛方法处理数据,可以有效地降低系统噪声的干扰,提高估计精度。
5 结论
针对锂离子电池SOC估计精度差的问题,本文将蒙特卡洛方法与SH-AUKF算法相结合来解决随机噪声对SOC估计精度的影响。在DST工况下,验证了新算法的估计效果,主要体现在以下几个方面。
(1) 在UKF中加入了Sage-Husa噪声估计器,提出了SH-AUKF算法。通过对不确定的噪声系统进行统计并不断迭代更新,实现$ Q_{k}$ $ R_{k}$
(2) 采用Max error、MAE、RMSE三种误差指标,对估计效果进行定量分析。结果表明,SH-AUKF的三种误差指标最小,估计效果最优;AUKF估计效果次之;UKF估计效果最差。
(3) 为了进一步减小噪声对SOC估计精度的影响,将蒙特卡洛方法与SH-AUKF算法相结合。试验结果表明,加入蒙特卡洛方法后,SH-AUKF的SOC估计曲线更为光滑,更加贴近真实值。同时,SH-AUKF的估计误差区间由±3×10-3 缩小到±1×10-3 ,估计精度提升了66.6%,有效降低了噪声干扰的偶然性和突发性对SOC估计的影响。
综上所述,将蒙特卡洛方法与SH-AUKF算法相结合用于SOC估计,可以降低系统噪声的干扰,提高估计精度。
参考文献
View Option
[1]
林成涛 , 王军平 , 陈全世 . 电动汽车SOC估计方法原理与应用
[J]. 电池 , 2004 , 34 (5 ):376 -378 .
[本文引用: 1]
LIN Chengtao WANG Junping CHEN Quanshi . Methods for state of charge estimation of EV batteries and their application
[J]. Battery Bimonthly , 2004 , 34 (5 ):376 -378 .
[本文引用: 1]
[2]
谈发明 , 赵俊杰 , 王琪 . 动力电池SOC估计的一种新型鲁棒UKF算法
[J]. 汽车工程 , 2019 , 41 (8 ):944 -952 .
[本文引用: 1]
TAN Faming ZHAO Junjie WANG Qi . A novel robust UKF algorithm for SOC estimation of traction battery
[J]. Automotive Engineering , 2019 , 41 (8 ):944 -952 .
[本文引用: 1]
[3]
黄文华 , 韩晓东 , 陈全世 , 等 . 电动汽车SOC估计算法与电池管理系统的研究
[J]. 汽车工程 , 2007 , 29 (3 ):198 -202 .
[本文引用: 1]
HUANG Wenhua HAN Xiaodong CHEN Quanshi , et al . A study on SOC estimation algorithm and battery management system for electric vehicle
[J]. Automotive Engineering , 2007 , 29 (3 ):198 -202 .
[本文引用: 1]
[4]
王海群 , 王水满 , 张怡 . 基于SSRCKF算法估计锂离子电池的SOC
[J]. 电池 , 2019 , 49 (4 ):301 -304 .
[本文引用: 1]
WANG Haiqun WANG Shuiman ZHANG Yi . Estimation of SOC in Li-ion battery based on SSRCKF algorithm
[J]. Battery Bimonthly , 2019 , 49 (4 ):301 -304 .
[本文引用: 1]
[5]
李伟 , 刘伟嵬 , 邓业林 . 基于扩展卡尔曼滤波的锂电池SOC估计
[J]. 中国机械工程 , 2020 , 31 (3 ):321 -327 .
[本文引用: 1]
LI Wei LIU Weiwei DENG Yelin . SOC estimation for lithium-ion batteries baesd on EKF
[J]. China Mechanical Engineering , 2020 , 31 (3 ):321 -327 .
[本文引用: 1]
[6]
颜湘武 , 邓浩然 , 郭琪 , 等 . 基于自适应无迹卡尔曼滤波的动力电池健康状态检测及梯次利用研究
[J]. 电工技术学报 , 2019 , 34 (18 ):3937 -3948 .
[本文引用: 1]
YAN Xiangwu DENG Haoran GUO Qi , et al . Study on the state of health detection of power batteries based on adaptive unscented Kalman filters and the battery echelon utilization
[J]. Transactions of China Electrotechnical Society , 2019 , 34 (18 ):3937 -3948 .
[本文引用: 1]
[7]
安治国 , 田茂飞 , 赵琳 , 等 . 基于自适应无迹卡尔曼滤波的锂电池SOC估计
[J]. 储能科学与技术 , 2019 , 8 (5 ):856 -861 .
[本文引用: 1]
AN Zhiguo TIAN Maofei ZHAO Lin , et al . SOC estimation of lithium battery based on adaptive untracked Kalman filter
[J]. Energy Storage Science and Technology , 2019 , 8 (5 ):856 -861 .
[本文引用: 1]
[8]
黄凯 , 郭永芳 , 李志刚 . 动力锂离子电池荷电状态估计综述
[J]. 电源技术 , 2018 , 42 (9 ):1398 -1401 .
[本文引用: 1]
HUANG Kai GUO Yongfang LI Zhigang . Review of state of charge estimation methods for power lithium-ion battery
[J]. Chinese Journal of Power Sources , 2018 , 42 (9 ):1398 -1401 .
[本文引用: 1]
[9]
梁嘉宁 , 谭霁宬 , 孙天夫 , 等 . 基于容积卡尔曼滤波算法估计动力锂电池荷电状态
[J]. 集成技术 , 2018 , 7 (6 ):31 -38 .
[本文引用: 1]
LIANG Jianing TAN Jicheng SUN Tianfu , et al . Power lithium battery state of charge estimation cubature Kalman filtering
[J]. Journal of Integration Technology , 2018 , 7 (6 ):31 -38 .
[本文引用: 1]
[10]
李争 , 张丽平 . 基于无迹卡尔曼滤波的锂离子电池SOC估计
[J]. 电池 , 2018 , 48 (5 ):313 -317 .
[本文引用: 1]
LI Zheng ZHANG Liping . SOC estimation of Li-ion battery based on unscented Kalman filter
[J]. Battery Bimonthly , 2018 , 48 (5 ):313 -317 .
[本文引用: 1]
[11]
刘胜永 , 于跃 , 罗文广 , 等 . 基于自适应无迹卡尔曼滤波的锂电池SOC估计
[J]. 控制工程 , 2017 , 24 (8 ):1611 -1616 .
[本文引用: 1]
LIU Shengyong YU Yue LUO Wenguang , et al . Estimation of state of charge for lithium battery based on adaptive unscented Kalman filter
[J]. Control Engineering of China , 2017 , 24 (8 ):1611 -1616 .
[本文引用: 1]
[12]
赵云飞 , 徐俊 , 王霄 , 等 . 双自适应衰减卡尔曼滤波锂电池荷电状态估计
[J]. 西安交通大学学报 , 2018 , 52 (12 ):99 -105 .
[本文引用: 1]
ZHAO Yunfei XU Jun WANG Xiao , et al . An estimation method for state of charge of lithium-ion batteries using dual adaptive fading extendde Kalman filter
[J]. Journal of Xi’an Jiaotong University , 2018 , 52 (12 ):99 -105 .
[本文引用: 1]
[13]
朱丽群 , 张建秋 . 一种联合锂电池健康和荷电状态的新模型
[J]. 中国电机工程学报 , 2018 , 38 (12 ):3613 -3620 .
[本文引用: 1]
ZHU Liqun ZHANG Jianqiu . A new model of jointed states of charge and health for lithium batteries
[J]. Proceedings of the CSEE , 2018 , 38 (12 ):3613 -3620 .
[本文引用: 1]
[14]
熊瑞 , 何洪文 , 许永莉 , 等 . 电动汽车用动力锂电池组建模和参数辨识方法
[J]. 吉林大学学报 , 2012 , 42 (4 ):809 -815 .
[本文引用: 1]
XIONG Rui HE Hongwen XU Yongli , et al . Modeling and parameter identification approach for power battery pack used in electric vehicle
[J]. Journal of Jilin University , 2012 , 42 (4 ):809 -815 .
[本文引用: 1]
[15]
王霄 , 徐俊 , 曹秉刚 , 等 . 小波降噪卡尔曼滤波锂电池荷电状态估计
[J]. 西安交通大学学报 , 2017 , 51 (10 ):71 -76 .
[本文引用: 1]
WANG Xiao XU Jun CAO Binggang , et al . A Kalman filter SOC estimation method for lithium-ion batteries based on discrete wavelet transform denoising
[J]. Journal of Xi’an Jiaotong University , 2017 , 51 (10 ):71 -76 .
[本文引用: 1]
[16]
TANIM T R RAHN C D WANG C Y . State of charge estimation of a lithium ion cell based on a temperature dependent and electrolyte enhanced single particle model
[J]. Energy , 2015 , 80 :731 -739 .
DOI:10.1016/j.energy.2014.12.031
URL
[本文引用: 1]
[17]
RAGHAVAN A KIESEL P SOMMER L W , et al . Embedded fiber-optic sensing for accurate internal monitoring of cell state in advanced battery management systems part 1:Cell embedding method and performance
[J]. J. Power Sources , 2017 , 341 :466 -473 .
DOI:10.1016/j.jpowsour.2016.11.104
URL
[本文引用: 1]
[19]
ANDERSON R ZANE R PLETT G , et al . Life balancing—A better way to balance large batteries
[R]. SAE Tech. Paper , 2017 -01-1210,2017.
[本文引用: 1]
电动汽车SOC估计方法原理与应用
1
2004
... 锂离子电池因其比能量高、自放电小等优点,被广泛用作电动汽车的动力电池[1 ] .为了提高锂离子电池的利用率,保障电动汽车的运行安全,电池管理系统必须获取精确的电池荷电状态(State of charge,SOC)数据[2 ⇓ ⇓ -5 ] .SOC表示电池使用一段时间或长期搁置不用后的剩余容量与额定容量的比值,常用百分数表示.SOC的大小无法直接进行测量,并且易受电池工作电流、电压和温度等因素的影响.因此,SOC的准确估计是电动汽车能否快速发展的重要因素之一[6 ] . ...
Methods for state of charge estimation of EV batteries and their application
1
2004
... 锂离子电池因其比能量高、自放电小等优点,被广泛用作电动汽车的动力电池[1 ] .为了提高锂离子电池的利用率,保障电动汽车的运行安全,电池管理系统必须获取精确的电池荷电状态(State of charge,SOC)数据[2 ⇓ ⇓ -5 ] .SOC表示电池使用一段时间或长期搁置不用后的剩余容量与额定容量的比值,常用百分数表示.SOC的大小无法直接进行测量,并且易受电池工作电流、电压和温度等因素的影响.因此,SOC的准确估计是电动汽车能否快速发展的重要因素之一[6 ] . ...
动力电池SOC估计的一种新型鲁棒UKF算法
1
2019
... 锂离子电池因其比能量高、自放电小等优点,被广泛用作电动汽车的动力电池[1 ] .为了提高锂离子电池的利用率,保障电动汽车的运行安全,电池管理系统必须获取精确的电池荷电状态(State of charge,SOC)数据[2 ⇓ ⇓ -5 ] .SOC表示电池使用一段时间或长期搁置不用后的剩余容量与额定容量的比值,常用百分数表示.SOC的大小无法直接进行测量,并且易受电池工作电流、电压和温度等因素的影响.因此,SOC的准确估计是电动汽车能否快速发展的重要因素之一[6 ] . ...
A novel robust UKF algorithm for SOC estimation of traction battery
1
2019
... 锂离子电池因其比能量高、自放电小等优点,被广泛用作电动汽车的动力电池[1 ] .为了提高锂离子电池的利用率,保障电动汽车的运行安全,电池管理系统必须获取精确的电池荷电状态(State of charge,SOC)数据[2 ⇓ ⇓ -5 ] .SOC表示电池使用一段时间或长期搁置不用后的剩余容量与额定容量的比值,常用百分数表示.SOC的大小无法直接进行测量,并且易受电池工作电流、电压和温度等因素的影响.因此,SOC的准确估计是电动汽车能否快速发展的重要因素之一[6 ] . ...
电动汽车SOC估计算法与电池管理系统的研究
1
2007
... 锂离子电池因其比能量高、自放电小等优点,被广泛用作电动汽车的动力电池[1 ] .为了提高锂离子电池的利用率,保障电动汽车的运行安全,电池管理系统必须获取精确的电池荷电状态(State of charge,SOC)数据[2 ⇓ ⇓ -5 ] .SOC表示电池使用一段时间或长期搁置不用后的剩余容量与额定容量的比值,常用百分数表示.SOC的大小无法直接进行测量,并且易受电池工作电流、电压和温度等因素的影响.因此,SOC的准确估计是电动汽车能否快速发展的重要因素之一[6 ] . ...
A study on SOC estimation algorithm and battery management system for electric vehicle
1
2007
... 锂离子电池因其比能量高、自放电小等优点,被广泛用作电动汽车的动力电池[1 ] .为了提高锂离子电池的利用率,保障电动汽车的运行安全,电池管理系统必须获取精确的电池荷电状态(State of charge,SOC)数据[2 ⇓ ⇓ -5 ] .SOC表示电池使用一段时间或长期搁置不用后的剩余容量与额定容量的比值,常用百分数表示.SOC的大小无法直接进行测量,并且易受电池工作电流、电压和温度等因素的影响.因此,SOC的准确估计是电动汽车能否快速发展的重要因素之一[6 ] . ...
基于SSRCKF算法估计锂离子电池的SOC
1
2019
... 锂离子电池因其比能量高、自放电小等优点,被广泛用作电动汽车的动力电池[1 ] .为了提高锂离子电池的利用率,保障电动汽车的运行安全,电池管理系统必须获取精确的电池荷电状态(State of charge,SOC)数据[2 ⇓ ⇓ -5 ] .SOC表示电池使用一段时间或长期搁置不用后的剩余容量与额定容量的比值,常用百分数表示.SOC的大小无法直接进行测量,并且易受电池工作电流、电压和温度等因素的影响.因此,SOC的准确估计是电动汽车能否快速发展的重要因素之一[6 ] . ...
Estimation of SOC in Li-ion battery based on SSRCKF algorithm
1
2019
... 锂离子电池因其比能量高、自放电小等优点,被广泛用作电动汽车的动力电池[1 ] .为了提高锂离子电池的利用率,保障电动汽车的运行安全,电池管理系统必须获取精确的电池荷电状态(State of charge,SOC)数据[2 ⇓ ⇓ -5 ] .SOC表示电池使用一段时间或长期搁置不用后的剩余容量与额定容量的比值,常用百分数表示.SOC的大小无法直接进行测量,并且易受电池工作电流、电压和温度等因素的影响.因此,SOC的准确估计是电动汽车能否快速发展的重要因素之一[6 ] . ...
基于扩展卡尔曼滤波的锂电池SOC估计
1
2020
... 锂离子电池因其比能量高、自放电小等优点,被广泛用作电动汽车的动力电池[1 ] .为了提高锂离子电池的利用率,保障电动汽车的运行安全,电池管理系统必须获取精确的电池荷电状态(State of charge,SOC)数据[2 ⇓ ⇓ -5 ] .SOC表示电池使用一段时间或长期搁置不用后的剩余容量与额定容量的比值,常用百分数表示.SOC的大小无法直接进行测量,并且易受电池工作电流、电压和温度等因素的影响.因此,SOC的准确估计是电动汽车能否快速发展的重要因素之一[6 ] . ...
SOC estimation for lithium-ion batteries baesd on EKF
1
2020
... 锂离子电池因其比能量高、自放电小等优点,被广泛用作电动汽车的动力电池[1 ] .为了提高锂离子电池的利用率,保障电动汽车的运行安全,电池管理系统必须获取精确的电池荷电状态(State of charge,SOC)数据[2 ⇓ ⇓ -5 ] .SOC表示电池使用一段时间或长期搁置不用后的剩余容量与额定容量的比值,常用百分数表示.SOC的大小无法直接进行测量,并且易受电池工作电流、电压和温度等因素的影响.因此,SOC的准确估计是电动汽车能否快速发展的重要因素之一[6 ] . ...
基于自适应无迹卡尔曼滤波的动力电池健康状态检测及梯次利用研究
1
2019
... 锂离子电池因其比能量高、自放电小等优点,被广泛用作电动汽车的动力电池[1 ] .为了提高锂离子电池的利用率,保障电动汽车的运行安全,电池管理系统必须获取精确的电池荷电状态(State of charge,SOC)数据[2 ⇓ ⇓ -5 ] .SOC表示电池使用一段时间或长期搁置不用后的剩余容量与额定容量的比值,常用百分数表示.SOC的大小无法直接进行测量,并且易受电池工作电流、电压和温度等因素的影响.因此,SOC的准确估计是电动汽车能否快速发展的重要因素之一[6 ] . ...
Study on the state of health detection of power batteries based on adaptive unscented Kalman filters and the battery echelon utilization
1
2019
... 锂离子电池因其比能量高、自放电小等优点,被广泛用作电动汽车的动力电池[1 ] .为了提高锂离子电池的利用率,保障电动汽车的运行安全,电池管理系统必须获取精确的电池荷电状态(State of charge,SOC)数据[2 ⇓ ⇓ -5 ] .SOC表示电池使用一段时间或长期搁置不用后的剩余容量与额定容量的比值,常用百分数表示.SOC的大小无法直接进行测量,并且易受电池工作电流、电压和温度等因素的影响.因此,SOC的准确估计是电动汽车能否快速发展的重要因素之一[6 ] . ...
基于自适应无迹卡尔曼滤波的锂电池SOC估计
1
2019
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
SOC estimation of lithium battery based on adaptive untracked Kalman filter
1
2019
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
动力锂离子电池荷电状态估计综述
1
2018
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
Review of state of charge estimation methods for power lithium-ion battery
1
2018
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
基于容积卡尔曼滤波算法估计动力锂电池荷电状态
1
2018
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
Power lithium battery state of charge estimation cubature Kalman filtering
1
2018
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
基于无迹卡尔曼滤波的锂离子电池SOC估计
1
2018
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
SOC estimation of Li-ion battery based on unscented Kalman filter
1
2018
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
基于自适应无迹卡尔曼滤波的锂电池SOC估计
1
2017
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
Estimation of state of charge for lithium battery based on adaptive unscented Kalman filter
1
2017
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
双自适应衰减卡尔曼滤波锂电池荷电状态估计
1
2018
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
An estimation method for state of charge of lithium-ion batteries using dual adaptive fading extendde Kalman filter
1
2018
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
一种联合锂电池健康和荷电状态的新模型
1
2018
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
A new model of jointed states of charge and health for lithium batteries
1
2018
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
电动汽车用动力锂电池组建模和参数辨识方法
1
2012
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
Modeling and parameter identification approach for power battery pack used in electric vehicle
1
2012
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
小波降噪卡尔曼滤波锂电池荷电状态估计
1
2017
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
A Kalman filter SOC estimation method for lithium-ion batteries based on discrete wavelet transform denoising
1
2017
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
State of charge estimation of a lithium ion cell based on a temperature dependent and electrolyte enhanced single particle model
1
2015
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
Embedded fiber-optic sensing for accurate internal monitoring of cell state in advanced battery management systems part 1:Cell embedding method and performance
1
2017
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
Power and thermal characterization of a lithium-ion battery pack for hybrid-electric vehicles
1
2006
... 为了提高SOC的估计精度,各国学者提出了多种多样的估算方法[7 -8 ] .安时积分法是最常用的估计方法,但需要精确的电流测量值,否则SOC估计误差会越来越大.开路电压法需要对电池长时间静置,确保电池电压稳定,因此无法实现SOC的在线实时估计.神经网络法、模糊逻辑法、支持向量机等虽然对SOC有较好的估计精度,但需要大量的数据进行训练[9 ⇓ ⇓ -12 ] .卡尔曼滤波法估计SOC的核心思想是对电池系统的状态做最小方差意义上的最优估计.目前,扩展卡尔曼滤波法(Extended Kalman filter,EKF)被较多应用于SOC估计中,但EKF通过泰勒级数展开对电池等效电路模型进行线性化处理,忽略二阶及高阶项的影响,不可避免地引入了线性化误差[13 ] .无迹卡尔曼滤波法(Unscented Kalman filter,UKF)通过无迹变换(Unscented transformation, UT)将均值和方差一步步向真实值逼近,无需对非线性系统进行线性化处理.相比于EKF,UKF具有更高的估计精度,可以有效减小EKF线性化带来的误差[14 ⇓ ⇓ ⇓ -18 ] . ...
Life balancing—A better way to balance large batteries
1
2017
... 但是使用EKF和UKF估计SOC时,将系统噪声和测量噪声视为常数处理,不符合电池工作的实际情况[19 ] .当电池工作环境发生变化时,周围的噪声会随着环境的变化而变化.针对在噪声影响多变的情况中SOC估计精度差的问题,本文采用Sage-Husa自适应算法与UKF相结合,提出了一种改进型的SH-AUKF算法,在估计过程中不断更新状态协方差和噪声协方差,以获得更加准确的SOC估计结果.此外,在改进算法中加入蒙特卡洛采样方法,进一步提高了算法的估计精度. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}