电动飞机技术的发展研究
1
2019
... 随着电气化交通的迅速发展,电动飞机成为重要的发展趋势[1 ] ,机电作动器(Electro-mechanical actuator,EMA)作为关键执行机构,具有广阔的应用前景.永磁同步电机(Permanent magnet synchronous motor,PMSM)凭借高转矩密度、高功率密度等优点,在航空EMA中广泛应用[2 ] . ...
电动飞机技术的发展研究
1
2019
... 随着电气化交通的迅速发展,电动飞机成为重要的发展趋势[1 ] ,机电作动器(Electro-mechanical actuator,EMA)作为关键执行机构,具有广阔的应用前景.永磁同步电机(Permanent magnet synchronous motor,PMSM)凭借高转矩密度、高功率密度等优点,在航空EMA中广泛应用[2 ] . ...
Design and testing of PMSM for aerospace EMA applications
1
2018
... 随着电气化交通的迅速发展,电动飞机成为重要的发展趋势[1 ] ,机电作动器(Electro-mechanical actuator,EMA)作为关键执行机构,具有广阔的应用前景.永磁同步电机(Permanent magnet synchronous motor,PMSM)凭借高转矩密度、高功率密度等优点,在航空EMA中广泛应用[2 ] . ...
NASA亚声速大型飞机电推进技术研究综述
1
2019
... 近年来,国内外都对EMA开展了大量研究.欧盟实施CleansSky和CleansSky 2计划,资助机电作动项目两项:西班牙研究与创新技术中心、意大利UMBRA CUSCINETTI SPA等单位联合进行“飞控系统机电作动器和电子控制单元开发”项目,研制周期为2017~2019年;意大利UMBRA CUSCINETTI SPA、贝加莫大学和英国ZETTLEX有限公司开展“高可靠带有监控的主控制面机电作动器”研究,研制周期为2016~2018年.美国国家航空航天局NASA也对亚声速大型飞机的电推进技术及电作动控制器开展研究[3 ] .2019年1月,航空发动机制造商Rolls-Royce公司宣布ACCEL(Accelerating the Electrification of Flight)计划,加速飞控系统的电气化.2019年8月,中国航空研究院在中国航空科学技术大会上发布了国内首部电动飞机发展白皮书[4 ] ,其中一个关键技术就是高效高功重比的电机驱动控制器.随着电动飞机的迅速发展,高动态性能的EMA将发挥更重要的作用. ...
NASA亚声速大型飞机电推进技术研究综述
1
2019
... 近年来,国内外都对EMA开展了大量研究.欧盟实施CleansSky和CleansSky 2计划,资助机电作动项目两项:西班牙研究与创新技术中心、意大利UMBRA CUSCINETTI SPA等单位联合进行“飞控系统机电作动器和电子控制单元开发”项目,研制周期为2017~2019年;意大利UMBRA CUSCINETTI SPA、贝加莫大学和英国ZETTLEX有限公司开展“高可靠带有监控的主控制面机电作动器”研究,研制周期为2016~2018年.美国国家航空航天局NASA也对亚声速大型飞机的电推进技术及电作动控制器开展研究[3 ] .2019年1月,航空发动机制造商Rolls-Royce公司宣布ACCEL(Accelerating the Electrification of Flight)计划,加速飞控系统的电气化.2019年8月,中国航空研究院在中国航空科学技术大会上发布了国内首部电动飞机发展白皮书[4 ] ,其中一个关键技术就是高效高功重比的电机驱动控制器.随着电动飞机的迅速发展,高动态性能的EMA将发挥更重要的作用. ...
电动飞机发展白皮书
1
2019
... 近年来,国内外都对EMA开展了大量研究.欧盟实施CleansSky和CleansSky 2计划,资助机电作动项目两项:西班牙研究与创新技术中心、意大利UMBRA CUSCINETTI SPA等单位联合进行“飞控系统机电作动器和电子控制单元开发”项目,研制周期为2017~2019年;意大利UMBRA CUSCINETTI SPA、贝加莫大学和英国ZETTLEX有限公司开展“高可靠带有监控的主控制面机电作动器”研究,研制周期为2016~2018年.美国国家航空航天局NASA也对亚声速大型飞机的电推进技术及电作动控制器开展研究[3 ] .2019年1月,航空发动机制造商Rolls-Royce公司宣布ACCEL(Accelerating the Electrification of Flight)计划,加速飞控系统的电气化.2019年8月,中国航空研究院在中国航空科学技术大会上发布了国内首部电动飞机发展白皮书[4 ] ,其中一个关键技术就是高效高功重比的电机驱动控制器.随着电动飞机的迅速发展,高动态性能的EMA将发挥更重要的作用. ...
电动飞机发展白皮书
1
2019
... 近年来,国内外都对EMA开展了大量研究.欧盟实施CleansSky和CleansSky 2计划,资助机电作动项目两项:西班牙研究与创新技术中心、意大利UMBRA CUSCINETTI SPA等单位联合进行“飞控系统机电作动器和电子控制单元开发”项目,研制周期为2017~2019年;意大利UMBRA CUSCINETTI SPA、贝加莫大学和英国ZETTLEX有限公司开展“高可靠带有监控的主控制面机电作动器”研究,研制周期为2016~2018年.美国国家航空航天局NASA也对亚声速大型飞机的电推进技术及电作动控制器开展研究[3 ] .2019年1月,航空发动机制造商Rolls-Royce公司宣布ACCEL(Accelerating the Electrification of Flight)计划,加速飞控系统的电气化.2019年8月,中国航空研究院在中国航空科学技术大会上发布了国内首部电动飞机发展白皮书[4 ] ,其中一个关键技术就是高效高功重比的电机驱动控制器.随着电动飞机的迅速发展,高动态性能的EMA将发挥更重要的作用. ...
Multi-level virtual prototyping of electromechanical actuation system for more electric aircraft
1
2018
...
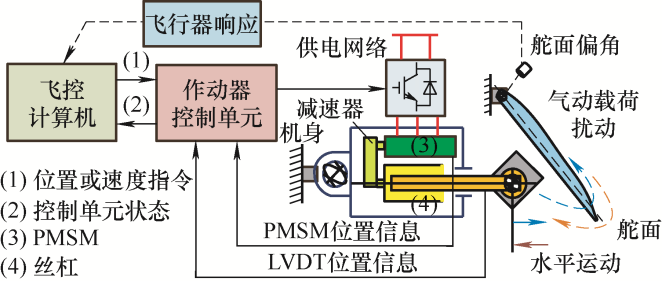
图1 是机电作动系统的示意图,包括飞控计算机、作动器控制单元、逆变电源、机械传动装置(减速器和丝杠)等组成部分,EMA通过控制电机驱动减速器、丝杠等机械传动装置,实现对舵面的驱动.由飞控计算机下达位置或者速度指令,作动器控制单元采集永磁同步电机的位置信息和线性可变差动变压器(Linear variable differential transformer,LVDT)的直线位移信息,完成高动态的位置或者速度闭环控制,使舵面偏转到指定的角度.
图1 机电作动系统示意图<sup>[<xref ref-type="bibr" rid="b5">5</xref>]</sup> ![]()
本文以机电作动系统a的自抗扰控制(Active disturbance rejection control,ADRC)为主线,综述了PMSM驱动中抗扰的主要挑战及现有解决方案,阐述了基于ADRC的PMSM伺服系统的强抗扰反馈控制律,位置、速度、电流各环路的扰动观测及抑制策略,最后对伺服系统的ADRC控制进行总结,展望航空机电作动未来的抗扰技术发展趋势. ...
电机气隙磁场调制行为及其转矩分析
1
2020
... (2) 未建模动态.PMSM是一个非线性、强耦合的系统,无论是三相定子坐标系还是旋转坐标系下的数学模型,都有假设及前提条件,并进行了不同程度的简化[6 ] .同时,EMA中采用减速器、丝杠等机械传动装置,由于齿轮间隙、摩擦力等因素,使整个机电作动系统呈现出明显的非线性特性,而机械部分的许多动态特性在建模时被忽略.可见,PMSM构成的机电作动系统的数学模型与实际系统之间存在未建模部分,使用数学模型描述时存在未建模动态[7 ] . ...
电机气隙磁场调制行为及其转矩分析
1
2020
... (2) 未建模动态.PMSM是一个非线性、强耦合的系统,无论是三相定子坐标系还是旋转坐标系下的数学模型,都有假设及前提条件,并进行了不同程度的简化[6 ] .同时,EMA中采用减速器、丝杠等机械传动装置,由于齿轮间隙、摩擦力等因素,使整个机电作动系统呈现出明显的非线性特性,而机械部分的许多动态特性在建模时被忽略.可见,PMSM构成的机电作动系统的数学模型与实际系统之间存在未建模部分,使用数学模型描述时存在未建模动态[7 ] . ...
关于反馈的作用及能力的认识
1
2003
... (2) 未建模动态.PMSM是一个非线性、强耦合的系统,无论是三相定子坐标系还是旋转坐标系下的数学模型,都有假设及前提条件,并进行了不同程度的简化[6 ] .同时,EMA中采用减速器、丝杠等机械传动装置,由于齿轮间隙、摩擦力等因素,使整个机电作动系统呈现出明显的非线性特性,而机械部分的许多动态特性在建模时被忽略.可见,PMSM构成的机电作动系统的数学模型与实际系统之间存在未建模部分,使用数学模型描述时存在未建模动态[7 ] . ...
关于反馈的作用及能力的认识
1
2003
... (2) 未建模动态.PMSM是一个非线性、强耦合的系统,无论是三相定子坐标系还是旋转坐标系下的数学模型,都有假设及前提条件,并进行了不同程度的简化[6 ] .同时,EMA中采用减速器、丝杠等机械传动装置,由于齿轮间隙、摩擦力等因素,使整个机电作动系统呈现出明显的非线性特性,而机械部分的许多动态特性在建模时被忽略.可见,PMSM构成的机电作动系统的数学模型与实际系统之间存在未建模部分,使用数学模型描述时存在未建模动态[7 ] . ...
Robust speed regulation for PMSM servo system with multiple sources of disturbances via an augmented disturbance observer
1
2018
... 上述模型参数不确定性、未建模动态及时变负载波动等多源扰动的存在给EMA的高动态控制带来了新的挑战[8 ] .近年来,在控制理论学术界抗扰动控制受到高度重视[9 ] ,高增益观测器[10 ] 、自抗扰控制[11 ] 、等价输入扰动[12 ] 、基于扰动观测器的控 制[13 ,14 ] 等多种抗扰控制方法相继提出.其中,ADRC是中国科学院数学与系统科学研究院韩京清研究员在经典PID控制的思想上提出的一种新型控制结构,旨在解决控制系统中的扰动问题.ADRC不是建立在一个精确模型的基础上,它对不确定性具 有极强的耐受性[15 ] ,在包括航空航天[16 ] 、运动控 制[17 ,18 ] 在内的许多领域得到广泛关注. ...
多源干扰系统复合分层抗干扰控制理论:综述与展望
1
2011
... 上述模型参数不确定性、未建模动态及时变负载波动等多源扰动的存在给EMA的高动态控制带来了新的挑战[8 ] .近年来,在控制理论学术界抗扰动控制受到高度重视[9 ] ,高增益观测器[10 ] 、自抗扰控制[11 ] 、等价输入扰动[12 ] 、基于扰动观测器的控 制[13 ,14 ] 等多种抗扰控制方法相继提出.其中,ADRC是中国科学院数学与系统科学研究院韩京清研究员在经典PID控制的思想上提出的一种新型控制结构,旨在解决控制系统中的扰动问题.ADRC不是建立在一个精确模型的基础上,它对不确定性具 有极强的耐受性[15 ] ,在包括航空航天[16 ] 、运动控 制[17 ,18 ] 在内的许多领域得到广泛关注. ...
多源干扰系统复合分层抗干扰控制理论:综述与展望
1
2011
... 上述模型参数不确定性、未建模动态及时变负载波动等多源扰动的存在给EMA的高动态控制带来了新的挑战[8 ] .近年来,在控制理论学术界抗扰动控制受到高度重视[9 ] ,高增益观测器[10 ] 、自抗扰控制[11 ] 、等价输入扰动[12 ] 、基于扰动观测器的控 制[13 ,14 ] 等多种抗扰控制方法相继提出.其中,ADRC是中国科学院数学与系统科学研究院韩京清研究员在经典PID控制的思想上提出的一种新型控制结构,旨在解决控制系统中的扰动问题.ADRC不是建立在一个精确模型的基础上,它对不确定性具 有极强的耐受性[15 ] ,在包括航空航天[16 ] 、运动控 制[17 ,18 ] 在内的许多领域得到广泛关注. ...
Performance recovery of feedback-linearization-based designs
1
2008
... 上述模型参数不确定性、未建模动态及时变负载波动等多源扰动的存在给EMA的高动态控制带来了新的挑战[8 ] .近年来,在控制理论学术界抗扰动控制受到高度重视[9 ] ,高增益观测器[10 ] 、自抗扰控制[11 ] 、等价输入扰动[12 ] 、基于扰动观测器的控 制[13 ,14 ] 等多种抗扰控制方法相继提出.其中,ADRC是中国科学院数学与系统科学研究院韩京清研究员在经典PID控制的思想上提出的一种新型控制结构,旨在解决控制系统中的扰动问题.ADRC不是建立在一个精确模型的基础上,它对不确定性具 有极强的耐受性[15 ] ,在包括航空航天[16 ] 、运动控 制[17 ,18 ] 在内的许多领域得到广泛关注. ...
自抗扰控制器及其应用
1
1998
... 上述模型参数不确定性、未建模动态及时变负载波动等多源扰动的存在给EMA的高动态控制带来了新的挑战[8 ] .近年来,在控制理论学术界抗扰动控制受到高度重视[9 ] ,高增益观测器[10 ] 、自抗扰控制[11 ] 、等价输入扰动[12 ] 、基于扰动观测器的控 制[13 ,14 ] 等多种抗扰控制方法相继提出.其中,ADRC是中国科学院数学与系统科学研究院韩京清研究员在经典PID控制的思想上提出的一种新型控制结构,旨在解决控制系统中的扰动问题.ADRC不是建立在一个精确模型的基础上,它对不确定性具 有极强的耐受性[15 ] ,在包括航空航天[16 ] 、运动控 制[17 ,18 ] 在内的许多领域得到广泛关注. ...
自抗扰控制器及其应用
1
1998
... 上述模型参数不确定性、未建模动态及时变负载波动等多源扰动的存在给EMA的高动态控制带来了新的挑战[8 ] .近年来,在控制理论学术界抗扰动控制受到高度重视[9 ] ,高增益观测器[10 ] 、自抗扰控制[11 ] 、等价输入扰动[12 ] 、基于扰动观测器的控 制[13 ,14 ] 等多种抗扰控制方法相继提出.其中,ADRC是中国科学院数学与系统科学研究院韩京清研究员在经典PID控制的思想上提出的一种新型控制结构,旨在解决控制系统中的扰动问题.ADRC不是建立在一个精确模型的基础上,它对不确定性具 有极强的耐受性[15 ] ,在包括航空航天[16 ] 、运动控 制[17 ,18 ] 在内的许多领域得到广泛关注. ...
Improving disturbance-rejection performance based on an equivalent- input-disturbance approach
1
2008
... 上述模型参数不确定性、未建模动态及时变负载波动等多源扰动的存在给EMA的高动态控制带来了新的挑战[8 ] .近年来,在控制理论学术界抗扰动控制受到高度重视[9 ] ,高增益观测器[10 ] 、自抗扰控制[11 ] 、等价输入扰动[12 ] 、基于扰动观测器的控 制[13 ,14 ] 等多种抗扰控制方法相继提出.其中,ADRC是中国科学院数学与系统科学研究院韩京清研究员在经典PID控制的思想上提出的一种新型控制结构,旨在解决控制系统中的扰动问题.ADRC不是建立在一个精确模型的基础上,它对不确定性具 有极强的耐受性[15 ] ,在包括航空航天[16 ] 、运动控 制[17 ,18 ] 在内的许多领域得到广泛关注. ...
Disturbance- observer-based control and related methods:An overview
1
2016
... 上述模型参数不确定性、未建模动态及时变负载波动等多源扰动的存在给EMA的高动态控制带来了新的挑战[8 ] .近年来,在控制理论学术界抗扰动控制受到高度重视[9 ] ,高增益观测器[10 ] 、自抗扰控制[11 ] 、等价输入扰动[12 ] 、基于扰动观测器的控 制[13 ,14 ] 等多种抗扰控制方法相继提出.其中,ADRC是中国科学院数学与系统科学研究院韩京清研究员在经典PID控制的思想上提出的一种新型控制结构,旨在解决控制系统中的扰动问题.ADRC不是建立在一个精确模型的基础上,它对不确定性具 有极强的耐受性[15 ] ,在包括航空航天[16 ] 、运动控 制[17 ,18 ] 在内的许多领域得到广泛关注. ...
A disturbance observer-based current-constrained controller for speed regulation of PMSM systems subject to unmatched disturbances
1
2021
... 上述模型参数不确定性、未建模动态及时变负载波动等多源扰动的存在给EMA的高动态控制带来了新的挑战[8 ] .近年来,在控制理论学术界抗扰动控制受到高度重视[9 ] ,高增益观测器[10 ] 、自抗扰控制[11 ] 、等价输入扰动[12 ] 、基于扰动观测器的控 制[13 ,14 ] 等多种抗扰控制方法相继提出.其中,ADRC是中国科学院数学与系统科学研究院韩京清研究员在经典PID控制的思想上提出的一种新型控制结构,旨在解决控制系统中的扰动问题.ADRC不是建立在一个精确模型的基础上,它对不确定性具 有极强的耐受性[15 ] ,在包括航空航天[16 ] 、运动控 制[17 ,18 ] 在内的许多领域得到广泛关注. ...
Active disturbance rejection control:Methodology and theoretical analysis
1
2014
... 上述模型参数不确定性、未建模动态及时变负载波动等多源扰动的存在给EMA的高动态控制带来了新的挑战[8 ] .近年来,在控制理论学术界抗扰动控制受到高度重视[9 ] ,高增益观测器[10 ] 、自抗扰控制[11 ] 、等价输入扰动[12 ] 、基于扰动观测器的控 制[13 ,14 ] 等多种抗扰控制方法相继提出.其中,ADRC是中国科学院数学与系统科学研究院韩京清研究员在经典PID控制的思想上提出的一种新型控制结构,旨在解决控制系统中的扰动问题.ADRC不是建立在一个精确模型的基础上,它对不确定性具 有极强的耐受性[15 ] ,在包括航空航天[16 ] 、运动控 制[17 ,18 ] 在内的许多领域得到广泛关注. ...
Active disturbance rejection control: Applications in aerospace
1
2018
... 上述模型参数不确定性、未建模动态及时变负载波动等多源扰动的存在给EMA的高动态控制带来了新的挑战[8 ] .近年来,在控制理论学术界抗扰动控制受到高度重视[9 ] ,高增益观测器[10 ] 、自抗扰控制[11 ] 、等价输入扰动[12 ] 、基于扰动观测器的控 制[13 ,14 ] 等多种抗扰控制方法相继提出.其中,ADRC是中国科学院数学与系统科学研究院韩京清研究员在经典PID控制的思想上提出的一种新型控制结构,旨在解决控制系统中的扰动问题.ADRC不是建立在一个精确模型的基础上,它对不确定性具 有极强的耐受性[15 ] ,在包括航空航天[16 ] 、运动控 制[17 ,18 ] 在内的许多领域得到广泛关注. ...
Active disturbance rejection control for PMLM servo system in CNC machining
1
2016
... 上述模型参数不确定性、未建模动态及时变负载波动等多源扰动的存在给EMA的高动态控制带来了新的挑战[8 ] .近年来,在控制理论学术界抗扰动控制受到高度重视[9 ] ,高增益观测器[10 ] 、自抗扰控制[11 ] 、等价输入扰动[12 ] 、基于扰动观测器的控 制[13 ,14 ] 等多种抗扰控制方法相继提出.其中,ADRC是中国科学院数学与系统科学研究院韩京清研究员在经典PID控制的思想上提出的一种新型控制结构,旨在解决控制系统中的扰动问题.ADRC不是建立在一个精确模型的基础上,它对不确定性具 有极强的耐受性[15 ] ,在包括航空航天[16 ] 、运动控 制[17 ,18 ] 在内的许多领域得到广泛关注. ...
无齿轮永磁曳引机无称重传感器自抗扰控制策略
1
2016
... 上述模型参数不确定性、未建模动态及时变负载波动等多源扰动的存在给EMA的高动态控制带来了新的挑战[8 ] .近年来,在控制理论学术界抗扰动控制受到高度重视[9 ] ,高增益观测器[10 ] 、自抗扰控制[11 ] 、等价输入扰动[12 ] 、基于扰动观测器的控 制[13 ,14 ] 等多种抗扰控制方法相继提出.其中,ADRC是中国科学院数学与系统科学研究院韩京清研究员在经典PID控制的思想上提出的一种新型控制结构,旨在解决控制系统中的扰动问题.ADRC不是建立在一个精确模型的基础上,它对不确定性具 有极强的耐受性[15 ] ,在包括航空航天[16 ] 、运动控 制[17 ,18 ] 在内的许多领域得到广泛关注. ...
无齿轮永磁曳引机无称重传感器自抗扰控制策略
1
2016
... 上述模型参数不确定性、未建模动态及时变负载波动等多源扰动的存在给EMA的高动态控制带来了新的挑战[8 ] .近年来,在控制理论学术界抗扰动控制受到高度重视[9 ] ,高增益观测器[10 ] 、自抗扰控制[11 ] 、等价输入扰动[12 ] 、基于扰动观测器的控 制[13 ,14 ] 等多种抗扰控制方法相继提出.其中,ADRC是中国科学院数学与系统科学研究院韩京清研究员在经典PID控制的思想上提出的一种新型控制结构,旨在解决控制系统中的扰动问题.ADRC不是建立在一个精确模型的基础上,它对不确定性具 有极强的耐受性[15 ] ,在包括航空航天[16 ] 、运动控 制[17 ,18 ] 在内的许多领域得到广泛关注. ...
浅谈工程控制的信息问题
1
2016
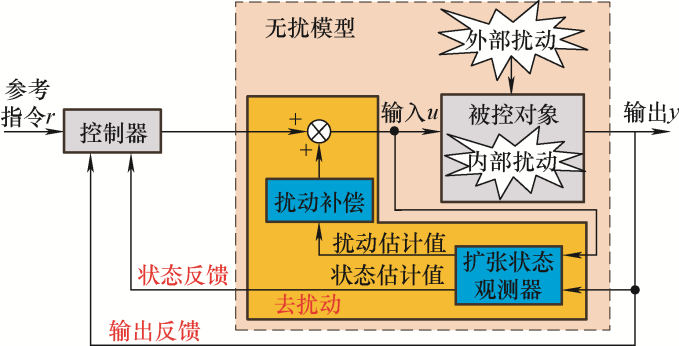
... 图2 中展示了ADRC架构,其并非特指某一特定运算的控制规律,而是一种二元控制架构[19 ] ,包括如下部分. ...
浅谈工程控制的信息问题
1
2016
... 图2 中展示了ADRC架构,其并非特指某一特定运算的控制规律,而是一种二元控制架构[19 ] ,包括如下部分. ...
Control theory,is it a model analysis approach or a direct control approach
1
1989
... ADRC与精确模型方法的思路差异在于ADRC是根据系统对信号的某一响应特征或者过程的某些实时信息来确定控制律,而不是用更高阶或更复杂的数学模型去描述系统中的非线性特性[20 ] . ...
Control theory,is it a model analysis approach or a direct control approach
1
1989
... ADRC与精确模型方法的思路差异在于ADRC是根据系统对信号的某一响应特征或者过程的某些实时信息来确定控制律,而不是用更高阶或更复杂的数学模型去描述系统中的非线性特性[20 ] . ...
1
2017
... 由文献[21 ]可知,早期对扰动的认识局限于狭义的扰动概念,狭义扰动来自系统外部,与系统的动态特性无关.随着抗扰理论的发展,出现了广义扰动的概念.ADRC中扰动是广义的概念,是标准型(串联积分型模型)之外的总扰动.根据文献[22 ]中内部扰动和外部扰动的定义,本文对EMA伺服系统位置环和速度环的扰动梳理如下. ...
1
2017
... 由文献[21 ]可知,早期对扰动的认识局限于狭义的扰动概念,狭义扰动来自系统外部,与系统的动态特性无关.随着抗扰理论的发展,出现了广义扰动的概念.ADRC中扰动是广义的概念,是标准型(串联积分型模型)之外的总扰动.根据文献[22 ]中内部扰动和外部扰动的定义,本文对EMA伺服系统位置环和速度环的扰动梳理如下. ...
自抗扰控制思想探究
1
2013
... 由文献[21 ]可知,早期对扰动的认识局限于狭义的扰动概念,狭义扰动来自系统外部,与系统的动态特性无关.随着抗扰理论的发展,出现了广义扰动的概念.ADRC中扰动是广义的概念,是标准型(串联积分型模型)之外的总扰动.根据文献[22 ]中内部扰动和外部扰动的定义,本文对EMA伺服系统位置环和速度环的扰动梳理如下. ...
自抗扰控制思想探究
1
2013
... 由文献[21 ]可知,早期对扰动的认识局限于狭义的扰动概念,狭义扰动来自系统外部,与系统的动态特性无关.随着抗扰理论的发展,出现了广义扰动的概念.ADRC中扰动是广义的概念,是标准型(串联积分型模型)之外的总扰动.根据文献[22 ]中内部扰动和外部扰动的定义,本文对EMA伺服系统位置环和速度环的扰动梳理如下. ...
A comparison of position control structures for ironless linear synchronous motor
1
2008
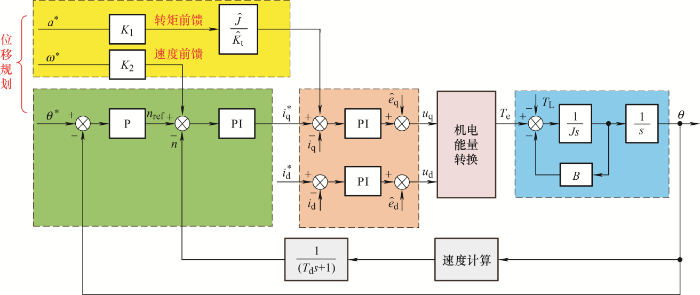
... 目前,机电作动PMSM伺服驱动中,最常用的是位置、速度、电流三闭环串级控制系统[23 ,24 ] , 如图3 所示.然而该架构在抗扰方面存在以下局限性:① 抗负载转矩T L 波动的能力弱;② 速度前馈和转矩前馈中需要用到惯量估计值
Modelling and simulation of flight control electromechanical actuators with special focus on model architecting,multidisciplinary effects and power flows
1
2017
... 目前,机电作动PMSM伺服驱动中,最常用的是位置、速度、电流三闭环串级控制系统[23 ,24 ] , 如图3 所示.然而该架构在抗扰方面存在以下局限性:① 抗负载转矩T L 波动的能力弱;② 速度前馈和转矩前馈中需要用到惯量估计值
基于自抗扰控制的双环伺服系统
1
2017
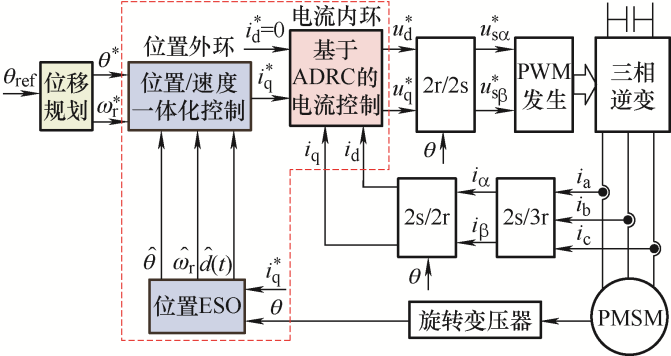
... 从式(2)可知,速度的积分是位置,故可以将速度和位置的微分方程视为两个一阶系统,设计成串级控制,也可以直接利用二阶模型一体化设计.文献[25 ]以提高伺服系统动态跟踪及抗扰性能为出发点,提出基于ADRC的PMSM双环伺服驱动系统,结构如图4 所示,通过位移规划解决定位过程中速度不可控的问题. ...
基于自抗扰控制的双环伺服系统
1
2017
... 从式(2)可知,速度的积分是位置,故可以将速度和位置的微分方程视为两个一阶系统,设计成串级控制,也可以直接利用二阶模型一体化设计.文献[25 ]以提高伺服系统动态跟踪及抗扰性能为出发点,提出基于ADRC的PMSM双环伺服驱动系统,结构如图4 所示,通过位移规划解决定位过程中速度不可控的问题. ...
Disturbance/ uncertainty estimation and attenuation techniques in pmsm drives:A survey
1
2017
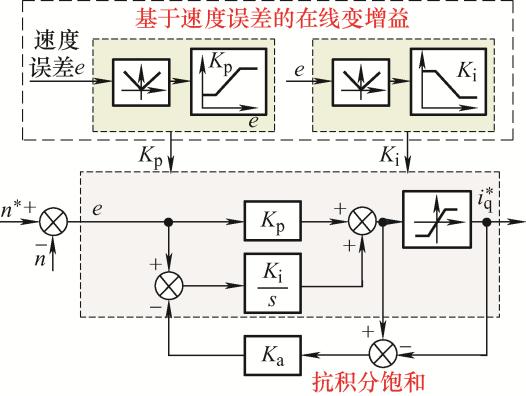
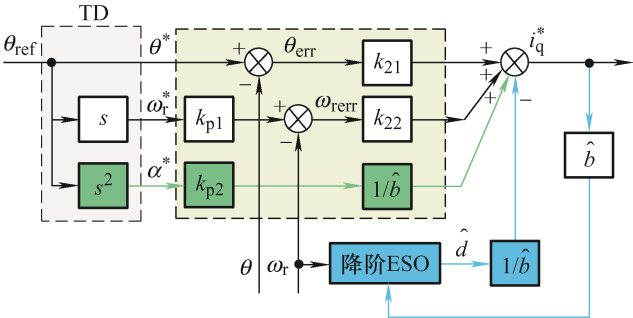
... 除了变增益抗积分饱和的改进PI控制器,为了扩宽位置环和速度环的频响、提高控制精度,国内外学者在运动控制的反馈控制律方面开展了大量研究[26 ] ,内模控制[27 ,28 ] 、滑模控制[29 ] 、鲁棒控制[30 ] 、分数阶控制[31 ] 、自抗扰控制[32 ,33 ] 等先进控制理论得到广泛关注.图6 是基于线性自抗扰控制(Linear ADRC, LADRC)的位置/速度复合控制的框图[34 ] ,可采用带宽化设计思路,参数整定简洁. ...
Fuzzy adaptive internal model control schemes for PMSM speed-regulation system
1
2012
... 除了变增益抗积分饱和的改进PI控制器,为了扩宽位置环和速度环的频响、提高控制精度,国内外学者在运动控制的反馈控制律方面开展了大量研究[26 ] ,内模控制[27 ,28 ] 、滑模控制[29 ] 、鲁棒控制[30 ] 、分数阶控制[31 ] 、自抗扰控制[32 ,33 ] 等先进控制理论得到广泛关注.图6 是基于线性自抗扰控制(Linear ADRC, LADRC)的位置/速度复合控制的框图[34 ] ,可采用带宽化设计思路,参数整定简洁. ...
基于三自由度内模控制的永磁同步电机矢量控制方法
1
2017
... 除了变增益抗积分饱和的改进PI控制器,为了扩宽位置环和速度环的频响、提高控制精度,国内外学者在运动控制的反馈控制律方面开展了大量研究[26 ] ,内模控制[27 ,28 ] 、滑模控制[29 ] 、鲁棒控制[30 ] 、分数阶控制[31 ] 、自抗扰控制[32 ,33 ] 等先进控制理论得到广泛关注.图6 是基于线性自抗扰控制(Linear ADRC, LADRC)的位置/速度复合控制的框图[34 ] ,可采用带宽化设计思路,参数整定简洁. ...
基于三自由度内模控制的永磁同步电机矢量控制方法
1
2017
... 除了变增益抗积分饱和的改进PI控制器,为了扩宽位置环和速度环的频响、提高控制精度,国内外学者在运动控制的反馈控制律方面开展了大量研究[26 ] ,内模控制[27 ,28 ] 、滑模控制[29 ] 、鲁棒控制[30 ] 、分数阶控制[31 ] 、自抗扰控制[32 ,33 ] 等先进控制理论得到广泛关注.图6 是基于线性自抗扰控制(Linear ADRC, LADRC)的位置/速度复合控制的框图[34 ] ,可采用带宽化设计思路,参数整定简洁. ...
Nonlinear speed control for PMSM system using sliding-mode control and disturbance compensation techniques
1
2013
... 除了变增益抗积分饱和的改进PI控制器,为了扩宽位置环和速度环的频响、提高控制精度,国内外学者在运动控制的反馈控制律方面开展了大量研究[26 ] ,内模控制[27 ,28 ] 、滑模控制[29 ] 、鲁棒控制[30 ] 、分数阶控制[31 ] 、自抗扰控制[32 ,33 ] 等先进控制理论得到广泛关注.图6 是基于线性自抗扰控制(Linear ADRC, LADRC)的位置/速度复合控制的框图[34 ] ,可采用带宽化设计思路,参数整定简洁. ...
Hybrid H∞ -based wavelet-neural- network tracking control for permanent-magnet synchronous motor servo drives
1
2010
... 除了变增益抗积分饱和的改进PI控制器,为了扩宽位置环和速度环的频响、提高控制精度,国内外学者在运动控制的反馈控制律方面开展了大量研究[26 ] ,内模控制[27 ,28 ] 、滑模控制[29 ] 、鲁棒控制[30 ] 、分数阶控制[31 ] 、自抗扰控制[32 ,33 ] 等先进控制理论得到广泛关注.图6 是基于线性自抗扰控制(Linear ADRC, LADRC)的位置/速度复合控制的框图[34 ] ,可采用带宽化设计思路,参数整定简洁. ...
Frequency domain modelling and control of fractional-order system for permanent magnet synchronous motor velocity servo system
1
2016
... 除了变增益抗积分饱和的改进PI控制器,为了扩宽位置环和速度环的频响、提高控制精度,国内外学者在运动控制的反馈控制律方面开展了大量研究[26 ] ,内模控制[27 ,28 ] 、滑模控制[29 ] 、鲁棒控制[30 ] 、分数阶控制[31 ] 、自抗扰控制[32 ,33 ] 等先进控制理论得到广泛关注.图6 是基于线性自抗扰控制(Linear ADRC, LADRC)的位置/速度复合控制的框图[34 ] ,可采用带宽化设计思路,参数整定简洁. ...
基于变结构自抗扰的永磁电动机速度控制系统
1
2015
... 除了变增益抗积分饱和的改进PI控制器,为了扩宽位置环和速度环的频响、提高控制精度,国内外学者在运动控制的反馈控制律方面开展了大量研究[26 ] ,内模控制[27 ,28 ] 、滑模控制[29 ] 、鲁棒控制[30 ] 、分数阶控制[31 ] 、自抗扰控制[32 ,33 ] 等先进控制理论得到广泛关注.图6 是基于线性自抗扰控制(Linear ADRC, LADRC)的位置/速度复合控制的框图[34 ] ,可采用带宽化设计思路,参数整定简洁. ...
基于变结构自抗扰的永磁电动机速度控制系统
1
2015
... 除了变增益抗积分饱和的改进PI控制器,为了扩宽位置环和速度环的频响、提高控制精度,国内外学者在运动控制的反馈控制律方面开展了大量研究[26 ] ,内模控制[27 ,28 ] 、滑模控制[29 ] 、鲁棒控制[30 ] 、分数阶控制[31 ] 、自抗扰控制[32 ,33 ] 等先进控制理论得到广泛关注.图6 是基于线性自抗扰控制(Linear ADRC, LADRC)的位置/速度复合控制的框图[34 ] ,可采用带宽化设计思路,参数整定简洁. ...
针对时变输入的永磁同步电机改进型自抗扰控制器
1
2017
... 除了变增益抗积分饱和的改进PI控制器,为了扩宽位置环和速度环的频响、提高控制精度,国内外学者在运动控制的反馈控制律方面开展了大量研究[26 ] ,内模控制[27 ,28 ] 、滑模控制[29 ] 、鲁棒控制[30 ] 、分数阶控制[31 ] 、自抗扰控制[32 ,33 ] 等先进控制理论得到广泛关注.图6 是基于线性自抗扰控制(Linear ADRC, LADRC)的位置/速度复合控制的框图[34 ] ,可采用带宽化设计思路,参数整定简洁. ...
针对时变输入的永磁同步电机改进型自抗扰控制器
1
2017
... 除了变增益抗积分饱和的改进PI控制器,为了扩宽位置环和速度环的频响、提高控制精度,国内外学者在运动控制的反馈控制律方面开展了大量研究[26 ] ,内模控制[27 ,28 ] 、滑模控制[29 ] 、鲁棒控制[30 ] 、分数阶控制[31 ] 、自抗扰控制[32 ,33 ] 等先进控制理论得到广泛关注.图6 是基于线性自抗扰控制(Linear ADRC, LADRC)的位置/速度复合控制的框图[34 ] ,可采用带宽化设计思路,参数整定简洁. ...
A linear ADRC-based robust high-dynamic double-loop servo system for aircraft electro-mechanical actuators
2
2019
... 除了变增益抗积分饱和的改进PI控制器,为了扩宽位置环和速度环的频响、提高控制精度,国内外学者在运动控制的反馈控制律方面开展了大量研究[26 ] ,内模控制[27 ,28 ] 、滑模控制[29 ] 、鲁棒控制[30 ] 、分数阶控制[31 ] 、自抗扰控制[32 ,33 ] 等先进控制理论得到广泛关注.图6 是基于线性自抗扰控制(Linear ADRC, LADRC)的位置/速度复合控制的框图[34 ] ,可采用带宽化设计思路,参数整定简洁. ...
... 为了提高抗内部和外部总扰动的能力,自抗扰控制已用于伺服控制[43 , 68 ] .文献[69 ]用非线性ADRC取代传统的速度环,研究了调速系统抗电阻、电感参数摄动和负载转矩扰动性能,取得较好的控制效果.ESO是韩京清研究员在状态观测器的基础上提出的一种实用的扰动观测器[70 ] .文献[34 ]中通过ESO对PMSM伺服系统的扰动力矩进行估计,并依据观测的负载转矩对q 轴的电流指令进行修正,实现扰动力矩的抑制.文献[71 ]通过ESO估计系统扰动,通过对估计扰动量的前馈补偿,提高了速度环负载突变时的动态性能.图11 是基于位置信息和fal函数的非线性ESO,实现伺服系统的总扰动估计,ESO的输入是位置测量值θ 和q 轴电流指令值$i_{\rm{q}}^*$,输出变量 72 ]提出PMSM调速系统的模型补偿ADRC策略,将模型中已知部分补偿到ADRC中去,减小观测器的补偿量,提高了观测器的估计精度.文献[73 ]比较基于状态观测器的PD反馈控制和基于ESO的控制,提供一个新的抗扰思路.在不改变原状态观测器和PD反馈控制的基础上,通过增加扰动观测模块提高系统的抗扰性能. ...
Reference modulation for performance enhancement of motion control systems with nonlinear parameter variations
1
2019
... 线性控制中通常采用高控制增益来抑制闭环控制的误差.然而,高增益反馈存在一定的局限性[35 ] ,例如对噪声更加敏感.同时,线性控制律以指数形式渐进收敛,这一特性意味着闭环误差的收敛时间较长.自抗扰控制中,韩京清研究员提出非线性函数fhan,表达式如下 ...
An overview of recent advances in fixed-time cooperative control of multiagent systems
1
2018
... 近年来,为进一步加速误差收敛,许多学者开展利用有限时间收敛理论的反馈控制律研究,进而提高闭环控制的动态性能.有限时间控制能够保证闭环误差在有限时间内收敛到零[36 ] ,明显缩短闭环系统的动态调节时间.目前,应用最广泛的一种控制信号非连续有限时间控制是终端滑模控制[37 ] .与传统滑模控制相比,终端滑模引入非线性切换面,改善闭环系统的收敛性能和抗扰动性能,是典型的非连续控制.然而,非连续状态反馈控制方法在趋于稳态时易出现抖振现象,降低稳态控制精度. ...
非线性系统有限时间控制研究综述
2
2020
... 近年来,为进一步加速误差收敛,许多学者开展利用有限时间收敛理论的反馈控制律研究,进而提高闭环控制的动态性能.有限时间控制能够保证闭环误差在有限时间内收敛到零[36 ] ,明显缩短闭环系统的动态调节时间.目前,应用最广泛的一种控制信号非连续有限时间控制是终端滑模控制[37 ] .与传统滑模控制相比,终端滑模引入非线性切换面,改善闭环系统的收敛性能和抗扰动性能,是典型的非连续控制.然而,非连续状态反馈控制方法在趋于稳态时易出现抖振现象,降低稳态控制精度. ...
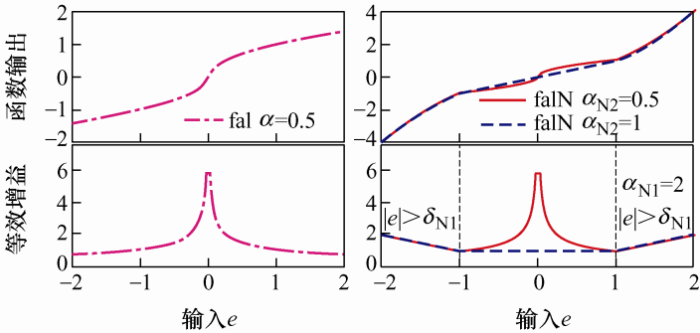
... 基于控制信号连续的有限时间控制作为一种介于光滑和非连续之间的非线性控制方法,兼具控制信号平滑和误差有限时间收敛的特性,基于齐次系统理论的控制是一种典型的有限时间收敛技术[37 ] ,在平衡点附近具备快速收敛及强抗扰的优势.基于齐次系统理论的闭环系统的有限时间收敛证明见文献[38 ].文献[39 ]针对电机的电流环设计有限时间收敛控制器,提高电流控制的动态性和参数摄动时的鲁棒性.文献[40 ]通过反步法设计有限时间位置控制器,仿真结果表明位置误差收敛速度更快.文 献[41 ]中利用基于齐次性方法的有限时间收敛速度控制器,并对系统误差的有限时间收敛性进行了证明,在理论方面为非光滑控制提供了有力的支撑.基于齐次的速度控制器由于非光滑特性具有更好的收敛和抗扰能力[41 ,42 ] .上述有限时间收敛控制均基于函数|e |α e ),其中参数α 的取值范围为0<α <1.非线性的fal函数是韩京清研究员提出的分段切换函数,其表达式如下 ...
非线性系统有限时间控制研究综述
2
2020
... 近年来,为进一步加速误差收敛,许多学者开展利用有限时间收敛理论的反馈控制律研究,进而提高闭环控制的动态性能.有限时间控制能够保证闭环误差在有限时间内收敛到零[36 ] ,明显缩短闭环系统的动态调节时间.目前,应用最广泛的一种控制信号非连续有限时间控制是终端滑模控制[37 ] .与传统滑模控制相比,终端滑模引入非线性切换面,改善闭环系统的收敛性能和抗扰动性能,是典型的非连续控制.然而,非连续状态反馈控制方法在趋于稳态时易出现抖振现象,降低稳态控制精度. ...
... 基于控制信号连续的有限时间控制作为一种介于光滑和非连续之间的非线性控制方法,兼具控制信号平滑和误差有限时间收敛的特性,基于齐次系统理论的控制是一种典型的有限时间收敛技术[37 ] ,在平衡点附近具备快速收敛及强抗扰的优势.基于齐次系统理论的闭环系统的有限时间收敛证明见文献[38 ].文献[39 ]针对电机的电流环设计有限时间收敛控制器,提高电流控制的动态性和参数摄动时的鲁棒性.文献[40 ]通过反步法设计有限时间位置控制器,仿真结果表明位置误差收敛速度更快.文 献[41 ]中利用基于齐次性方法的有限时间收敛速度控制器,并对系统误差的有限时间收敛性进行了证明,在理论方面为非光滑控制提供了有力的支撑.基于齐次的速度控制器由于非光滑特性具有更好的收敛和抗扰能力[41 ,42 ] .上述有限时间收敛控制均基于函数|e |α e ),其中参数α 的取值范围为0<α <1.非线性的fal函数是韩京清研究员提出的分段切换函数,其表达式如下 ...
1
1997
... 基于控制信号连续的有限时间控制作为一种介于光滑和非连续之间的非线性控制方法,兼具控制信号平滑和误差有限时间收敛的特性,基于齐次系统理论的控制是一种典型的有限时间收敛技术[37 ] ,在平衡点附近具备快速收敛及强抗扰的优势.基于齐次系统理论的闭环系统的有限时间收敛证明见文献[38 ].文献[39 ]针对电机的电流环设计有限时间收敛控制器,提高电流控制的动态性和参数摄动时的鲁棒性.文献[40 ]通过反步法设计有限时间位置控制器,仿真结果表明位置误差收敛速度更快.文 献[41 ]中利用基于齐次性方法的有限时间收敛速度控制器,并对系统误差的有限时间收敛性进行了证明,在理论方面为非光滑控制提供了有力的支撑.基于齐次的速度控制器由于非光滑特性具有更好的收敛和抗扰能力[41 ,42 ] .上述有限时间收敛控制均基于函数|e |α e ),其中参数α 的取值范围为0<α <1.非线性的fal函数是韩京清研究员提出的分段切换函数,其表达式如下 ...
A novel mixed cascade finite-time switching control design for induction motor
1
2019
... 基于控制信号连续的有限时间控制作为一种介于光滑和非连续之间的非线性控制方法,兼具控制信号平滑和误差有限时间收敛的特性,基于齐次系统理论的控制是一种典型的有限时间收敛技术[37 ] ,在平衡点附近具备快速收敛及强抗扰的优势.基于齐次系统理论的闭环系统的有限时间收敛证明见文献[38 ].文献[39 ]针对电机的电流环设计有限时间收敛控制器,提高电流控制的动态性和参数摄动时的鲁棒性.文献[40 ]通过反步法设计有限时间位置控制器,仿真结果表明位置误差收敛速度更快.文 献[41 ]中利用基于齐次性方法的有限时间收敛速度控制器,并对系统误差的有限时间收敛性进行了证明,在理论方面为非光滑控制提供了有力的支撑.基于齐次的速度控制器由于非光滑特性具有更好的收敛和抗扰能力[41 ,42 ] .上述有限时间收敛控制均基于函数|e |α e ),其中参数α 的取值范围为0<α <1.非线性的fal函数是韩京清研究员提出的分段切换函数,其表达式如下 ...
永磁同步电机伺服系统的有限时间位置控制
1
2010
... 基于控制信号连续的有限时间控制作为一种介于光滑和非连续之间的非线性控制方法,兼具控制信号平滑和误差有限时间收敛的特性,基于齐次系统理论的控制是一种典型的有限时间收敛技术[37 ] ,在平衡点附近具备快速收敛及强抗扰的优势.基于齐次系统理论的闭环系统的有限时间收敛证明见文献[38 ].文献[39 ]针对电机的电流环设计有限时间收敛控制器,提高电流控制的动态性和参数摄动时的鲁棒性.文献[40 ]通过反步法设计有限时间位置控制器,仿真结果表明位置误差收敛速度更快.文 献[41 ]中利用基于齐次性方法的有限时间收敛速度控制器,并对系统误差的有限时间收敛性进行了证明,在理论方面为非光滑控制提供了有力的支撑.基于齐次的速度控制器由于非光滑特性具有更好的收敛和抗扰能力[41 ,42 ] .上述有限时间收敛控制均基于函数|e |α e ),其中参数α 的取值范围为0<α <1.非线性的fal函数是韩京清研究员提出的分段切换函数,其表达式如下 ...
永磁同步电机伺服系统的有限时间位置控制
1
2010
... 基于控制信号连续的有限时间控制作为一种介于光滑和非连续之间的非线性控制方法,兼具控制信号平滑和误差有限时间收敛的特性,基于齐次系统理论的控制是一种典型的有限时间收敛技术[37 ] ,在平衡点附近具备快速收敛及强抗扰的优势.基于齐次系统理论的闭环系统的有限时间收敛证明见文献[38 ].文献[39 ]针对电机的电流环设计有限时间收敛控制器,提高电流控制的动态性和参数摄动时的鲁棒性.文献[40 ]通过反步法设计有限时间位置控制器,仿真结果表明位置误差收敛速度更快.文 献[41 ]中利用基于齐次性方法的有限时间收敛速度控制器,并对系统误差的有限时间收敛性进行了证明,在理论方面为非光滑控制提供了有力的支撑.基于齐次的速度控制器由于非光滑特性具有更好的收敛和抗扰能力[41 ,42 ] .上述有限时间收敛控制均基于函数|e |α e ),其中参数α 的取值范围为0<α <1.非线性的fal函数是韩京清研究员提出的分段切换函数,其表达式如下 ...
A speed control for a PMSM using finite-time feedback control and disturbance compensation
2
2009
... 基于控制信号连续的有限时间控制作为一种介于光滑和非连续之间的非线性控制方法,兼具控制信号平滑和误差有限时间收敛的特性,基于齐次系统理论的控制是一种典型的有限时间收敛技术[37 ] ,在平衡点附近具备快速收敛及强抗扰的优势.基于齐次系统理论的闭环系统的有限时间收敛证明见文献[38 ].文献[39 ]针对电机的电流环设计有限时间收敛控制器,提高电流控制的动态性和参数摄动时的鲁棒性.文献[40 ]通过反步法设计有限时间位置控制器,仿真结果表明位置误差收敛速度更快.文 献[41 ]中利用基于齐次性方法的有限时间收敛速度控制器,并对系统误差的有限时间收敛性进行了证明,在理论方面为非光滑控制提供了有力的支撑.基于齐次的速度控制器由于非光滑特性具有更好的收敛和抗扰能力[41 ,42 ] .上述有限时间收敛控制均基于函数|e |α e ),其中参数α 的取值范围为0<α <1.非线性的fal函数是韩京清研究员提出的分段切换函数,其表达式如下 ...
... [41 ,42 ].上述有限时间收敛控制均基于函数|e |α e ),其中参数α 的取值范围为0<α <1.非线性的fal函数是韩京清研究员提出的分段切换函数,其表达式如下 ...
A non-smooth composite control approach for direct torque control of permanent magnet synchronous machines
1
2019
... 基于控制信号连续的有限时间控制作为一种介于光滑和非连续之间的非线性控制方法,兼具控制信号平滑和误差有限时间收敛的特性,基于齐次系统理论的控制是一种典型的有限时间收敛技术[37 ] ,在平衡点附近具备快速收敛及强抗扰的优势.基于齐次系统理论的闭环系统的有限时间收敛证明见文献[38 ].文献[39 ]针对电机的电流环设计有限时间收敛控制器,提高电流控制的动态性和参数摄动时的鲁棒性.文献[40 ]通过反步法设计有限时间位置控制器,仿真结果表明位置误差收敛速度更快.文 献[41 ]中利用基于齐次性方法的有限时间收敛速度控制器,并对系统误差的有限时间收敛性进行了证明,在理论方面为非光滑控制提供了有力的支撑.基于齐次的速度控制器由于非光滑特性具有更好的收敛和抗扰能力[41 ,42 ] .上述有限时间收敛控制均基于函数|e |α e ),其中参数α 的取值范围为0<α <1.非线性的fal函数是韩京清研究员提出的分段切换函数,其表达式如下 ...
Weight-transducerless control strategy based on active disturbance rejection theory for gearless elevator drives
2
2017
... fal函数可用于状态误差反馈非线性控制,基于fal函数的反馈控制律的有效性已经在多个应用得到验证[43 ,44 ] .然而,经过研究发现,在闭环系统的误差远离平衡点时,函数|e |α e )(0<α <1)的控制效率低于光滑函数(1<α ). ...
... 为了提高抗内部和外部总扰动的能力,自抗扰控制已用于伺服控制[43 , 68 ] .文献[69 ]用非线性ADRC取代传统的速度环,研究了调速系统抗电阻、电感参数摄动和负载转矩扰动性能,取得较好的控制效果.ESO是韩京清研究员在状态观测器的基础上提出的一种实用的扰动观测器[70 ] .文献[34 ]中通过ESO对PMSM伺服系统的扰动力矩进行估计,并依据观测的负载转矩对q 轴的电流指令进行修正,实现扰动力矩的抑制.文献[71 ]通过ESO估计系统扰动,通过对估计扰动量的前馈补偿,提高了速度环负载突变时的动态性能.图11 是基于位置信息和fal函数的非线性ESO,实现伺服系统的总扰动估计,ESO的输入是位置测量值θ 和q 轴电流指令值$i_{\rm{q}}^*$,输出变量 72 ]提出PMSM调速系统的模型补偿ADRC策略,将模型中已知部分补偿到ADRC中去,减小观测器的补偿量,提高了观测器的估计精度.文献[73 ]比较基于状态观测器的PD反馈控制和基于ESO的控制,提供一个新的抗扰思路.在不改变原状态观测器和PD反馈控制的基础上,通过增加扰动观测模块提高系统的抗扰性能. ...
基于时变参数扰动观测器补偿的永磁同步电机非光滑速度调节器
1
2019
... fal函数可用于状态误差反馈非线性控制,基于fal函数的反馈控制律的有效性已经在多个应用得到验证[43 ,44 ] .然而,经过研究发现,在闭环系统的误差远离平衡点时,函数|e |α e )(0<α <1)的控制效率低于光滑函数(1<α ). ...
基于时变参数扰动观测器补偿的永磁同步电机非光滑速度调节器
1
2019
... fal函数可用于状态误差反馈非线性控制,基于fal函数的反馈控制律的有效性已经在多个应用得到验证[43 ,44 ] .然而,经过研究发现,在闭环系统的误差远离平衡点时,函数|e |α e )(0<α <1)的控制效率低于光滑函数(1<α ). ...
Tuning method aimed at optimized settling time and overshoot for synchronous proportional-integral current control in electric machines
3
2014
... 无论是三闭环串级伺服控制,还是双环伺服,电流环作为内环,决定着PMSM的转矩控制,而转矩控制的性能对外环的速度和位置响应影响很大,制约着位置控制的动态性能.为实现伺服驱动位置环的高带宽,要求内环能够精确、快速地控制PMSM的电磁转矩.为实现更高动态的转矩响应,近年来多种先进控制方法已应用于PMSM电流控制,包括优化PID控制[45 ] 、内模控制[46 ] 、无差拍控制[47 ] 、滑模控制[48 ] 、模型预测控制[49 ] 、有约束电流优化控制[50 ] 等. ...
... 针对电机驱动中定子电阻R s 的变化,一种解决措施是引入虚拟电阻来降低控制器对电阻参数摄动的敏感度[45 , 51 ] .文献[45 ]给出可以优化超调和调节时间的PI参数整定方法,而且文中也采用基于虚拟电阻的方法,提升电阻及电感摄动时的鲁棒性[52 ] .虚拟电阻使电流闭环系统的时间常数增大,提升参数鲁棒性的同时降低了电流控制的动态性能. ...
... .文献[45 ]给出可以优化超调和调节时间的PI参数整定方法,而且文中也采用基于虚拟电阻的方法,提升电阻及电感摄动时的鲁棒性[52 ] .虚拟电阻使电流闭环系统的时间常数增大,提升参数鲁棒性的同时降低了电流控制的动态性能. ...
Research on two-degree-of-freedom internal model control strategy for induction motor based on immune algorithm
1
2016
... 无论是三闭环串级伺服控制,还是双环伺服,电流环作为内环,决定着PMSM的转矩控制,而转矩控制的性能对外环的速度和位置响应影响很大,制约着位置控制的动态性能.为实现伺服驱动位置环的高带宽,要求内环能够精确、快速地控制PMSM的电磁转矩.为实现更高动态的转矩响应,近年来多种先进控制方法已应用于PMSM电流控制,包括优化PID控制[45 ] 、内模控制[46 ] 、无差拍控制[47 ] 、滑模控制[48 ] 、模型预测控制[49 ] 、有约束电流优化控制[50 ] 等. ...
永磁同步电机电流预测控制算法
1
2012
... 无论是三闭环串级伺服控制,还是双环伺服,电流环作为内环,决定着PMSM的转矩控制,而转矩控制的性能对外环的速度和位置响应影响很大,制约着位置控制的动态性能.为实现伺服驱动位置环的高带宽,要求内环能够精确、快速地控制PMSM的电磁转矩.为实现更高动态的转矩响应,近年来多种先进控制方法已应用于PMSM电流控制,包括优化PID控制[45 ] 、内模控制[46 ] 、无差拍控制[47 ] 、滑模控制[48 ] 、模型预测控制[49 ] 、有约束电流优化控制[50 ] 等. ...
永磁同步电机电流预测控制算法
1
2012
... 无论是三闭环串级伺服控制,还是双环伺服,电流环作为内环,决定着PMSM的转矩控制,而转矩控制的性能对外环的速度和位置响应影响很大,制约着位置控制的动态性能.为实现伺服驱动位置环的高带宽,要求内环能够精确、快速地控制PMSM的电磁转矩.为实现更高动态的转矩响应,近年来多种先进控制方法已应用于PMSM电流控制,包括优化PID控制[45 ] 、内模控制[46 ] 、无差拍控制[47 ] 、滑模控制[48 ] 、模型预测控制[49 ] 、有约束电流优化控制[50 ] 等. ...
Active-disturbance-rejection- based sliding-mode current control for permanent-magnet synchronous motors
1
2021
... 无论是三闭环串级伺服控制,还是双环伺服,电流环作为内环,决定着PMSM的转矩控制,而转矩控制的性能对外环的速度和位置响应影响很大,制约着位置控制的动态性能.为实现伺服驱动位置环的高带宽,要求内环能够精确、快速地控制PMSM的电磁转矩.为实现更高动态的转矩响应,近年来多种先进控制方法已应用于PMSM电流控制,包括优化PID控制[45 ] 、内模控制[46 ] 、无差拍控制[47 ] 、滑模控制[48 ] 、模型预测控制[49 ] 、有约束电流优化控制[50 ] 等. ...
Predictive current control for PMSM systems using extended sliding mode observer with Hurwitz-based power reaching law
1
2021
... 无论是三闭环串级伺服控制,还是双环伺服,电流环作为内环,决定着PMSM的转矩控制,而转矩控制的性能对外环的速度和位置响应影响很大,制约着位置控制的动态性能.为实现伺服驱动位置环的高带宽,要求内环能够精确、快速地控制PMSM的电磁转矩.为实现更高动态的转矩响应,近年来多种先进控制方法已应用于PMSM电流控制,包括优化PID控制[45 ] 、内模控制[46 ] 、无差拍控制[47 ] 、滑模控制[48 ] 、模型预测控制[49 ] 、有约束电流优化控制[50 ] 等. ...
Optimal control solutions for PMSM drives:A comparison study with experimental assessments
1
2018
... 无论是三闭环串级伺服控制,还是双环伺服,电流环作为内环,决定着PMSM的转矩控制,而转矩控制的性能对外环的速度和位置响应影响很大,制约着位置控制的动态性能.为实现伺服驱动位置环的高带宽,要求内环能够精确、快速地控制PMSM的电磁转矩.为实现更高动态的转矩响应,近年来多种先进控制方法已应用于PMSM电流控制,包括优化PID控制[45 ] 、内模控制[46 ] 、无差拍控制[47 ] 、滑模控制[48 ] 、模型预测控制[49 ] 、有约束电流优化控制[50 ] 等. ...
Digital current controller with error-free feedback acquisition and active resistance
1
2018
... 针对电机驱动中定子电阻R s 的变化,一种解决措施是引入虚拟电阻来降低控制器对电阻参数摄动的敏感度[45 , 51 ] .文献[45 ]给出可以优化超调和调节时间的PI参数整定方法,而且文中也采用基于虚拟电阻的方法,提升电阻及电感摄动时的鲁棒性[52 ] .虚拟电阻使电流闭环系统的时间常数增大,提升参数鲁棒性的同时降低了电流控制的动态性能. ...
基于虚拟阻抗的永磁同步电机电流环控制策略
1
2017
... 针对电机驱动中定子电阻R s 的变化,一种解决措施是引入虚拟电阻来降低控制器对电阻参数摄动的敏感度[45 , 51 ] .文献[45 ]给出可以优化超调和调节时间的PI参数整定方法,而且文中也采用基于虚拟电阻的方法,提升电阻及电感摄动时的鲁棒性[52 ] .虚拟电阻使电流闭环系统的时间常数增大,提升参数鲁棒性的同时降低了电流控制的动态性能. ...
基于虚拟阻抗的永磁同步电机电流环控制策略
1
2017
... 针对电机驱动中定子电阻R s 的变化,一种解决措施是引入虚拟电阻来降低控制器对电阻参数摄动的敏感度[45 , 51 ] .文献[45 ]给出可以优化超调和调节时间的PI参数整定方法,而且文中也采用基于虚拟电阻的方法,提升电阻及电感摄动时的鲁棒性[52 ] .虚拟电阻使电流闭环系统的时间常数增大,提升参数鲁棒性的同时降低了电流控制的动态性能. ...
Flux immunity robust predictive current control with incremental model and extended state observer for PMSM drive
1
2017
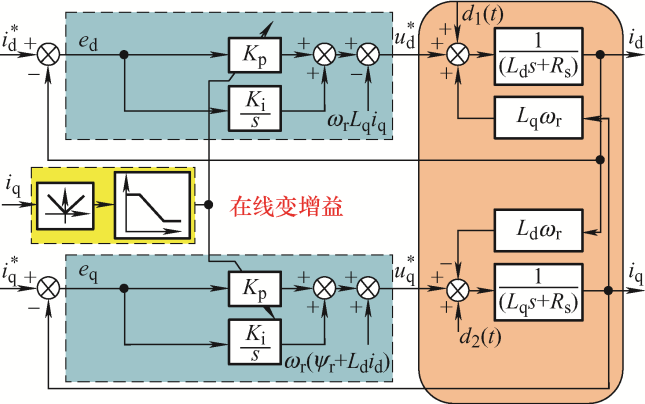
... 如果将电阻、电感的标称值当作基本模型,从扰动的角度看,dq 轴的交叉耦合和电阻、电感参数摄动可以看作标称模型之外的扰动,因此可以通过ESO达到提高参数鲁棒性及动态解耦的目标.文 献[53 ]中提出一种基于增量模型和ESO的鲁棒电流预测控制,使用增量模型使预测模型无需转子磁链,通过ESO提高了电感失配时的鲁棒性.文献[54 ]中构建ESO来观测参数偏差造成的系统扰动,为传统预测控制算法提供实时性扰动补偿,仿真结果显示有效改善了传统电流预测控制中PMSM参数扰动偏差造成的输出电流静差及振荡问题.文献[55 ]对基于fal函数的ESO进行改进,设计增益连续的ESO用于PMSM的电流解耦控制,对参数不确定性进行补偿.文献[56 ]中提出一种用于PMSM的基于扰动估计器的电流控制方法.文献[57 ]中开发一种自适应滑模电流控制器,基于滑模的扰动观测器能够提升电流环抗电气参数摄动的能力. ...
基于扩张状态观测器的永磁同步电机PWM电流预测控制
1
2018
... 如果将电阻、电感的标称值当作基本模型,从扰动的角度看,dq 轴的交叉耦合和电阻、电感参数摄动可以看作标称模型之外的扰动,因此可以通过ESO达到提高参数鲁棒性及动态解耦的目标.文 献[53 ]中提出一种基于增量模型和ESO的鲁棒电流预测控制,使用增量模型使预测模型无需转子磁链,通过ESO提高了电感失配时的鲁棒性.文献[54 ]中构建ESO来观测参数偏差造成的系统扰动,为传统预测控制算法提供实时性扰动补偿,仿真结果显示有效改善了传统电流预测控制中PMSM参数扰动偏差造成的输出电流静差及振荡问题.文献[55 ]对基于fal函数的ESO进行改进,设计增益连续的ESO用于PMSM的电流解耦控制,对参数不确定性进行补偿.文献[56 ]中提出一种用于PMSM的基于扰动估计器的电流控制方法.文献[57 ]中开发一种自适应滑模电流控制器,基于滑模的扰动观测器能够提升电流环抗电气参数摄动的能力. ...
基于扩张状态观测器的永磁同步电机PWM电流预测控制
1
2018
... 如果将电阻、电感的标称值当作基本模型,从扰动的角度看,dq 轴的交叉耦合和电阻、电感参数摄动可以看作标称模型之外的扰动,因此可以通过ESO达到提高参数鲁棒性及动态解耦的目标.文 献[53 ]中提出一种基于增量模型和ESO的鲁棒电流预测控制,使用增量模型使预测模型无需转子磁链,通过ESO提高了电感失配时的鲁棒性.文献[54 ]中构建ESO来观测参数偏差造成的系统扰动,为传统预测控制算法提供实时性扰动补偿,仿真结果显示有效改善了传统电流预测控制中PMSM参数扰动偏差造成的输出电流静差及振荡问题.文献[55 ]对基于fal函数的ESO进行改进,设计增益连续的ESO用于PMSM的电流解耦控制,对参数不确定性进行补偿.文献[56 ]中提出一种用于PMSM的基于扰动估计器的电流控制方法.文献[57 ]中开发一种自适应滑模电流控制器,基于滑模的扰动观测器能够提升电流环抗电气参数摄动的能力. ...
基于增益连续扩张状态观测器的永磁同步电机电流解耦控制
1
2020
... 如果将电阻、电感的标称值当作基本模型,从扰动的角度看,dq 轴的交叉耦合和电阻、电感参数摄动可以看作标称模型之外的扰动,因此可以通过ESO达到提高参数鲁棒性及动态解耦的目标.文 献[53 ]中提出一种基于增量模型和ESO的鲁棒电流预测控制,使用增量模型使预测模型无需转子磁链,通过ESO提高了电感失配时的鲁棒性.文献[54 ]中构建ESO来观测参数偏差造成的系统扰动,为传统预测控制算法提供实时性扰动补偿,仿真结果显示有效改善了传统电流预测控制中PMSM参数扰动偏差造成的输出电流静差及振荡问题.文献[55 ]对基于fal函数的ESO进行改进,设计增益连续的ESO用于PMSM的电流解耦控制,对参数不确定性进行补偿.文献[56 ]中提出一种用于PMSM的基于扰动估计器的电流控制方法.文献[57 ]中开发一种自适应滑模电流控制器,基于滑模的扰动观测器能够提升电流环抗电气参数摄动的能力. ...
基于增益连续扩张状态观测器的永磁同步电机电流解耦控制
1
2020
... 如果将电阻、电感的标称值当作基本模型,从扰动的角度看,dq 轴的交叉耦合和电阻、电感参数摄动可以看作标称模型之外的扰动,因此可以通过ESO达到提高参数鲁棒性及动态解耦的目标.文 献[53 ]中提出一种基于增量模型和ESO的鲁棒电流预测控制,使用增量模型使预测模型无需转子磁链,通过ESO提高了电感失配时的鲁棒性.文献[54 ]中构建ESO来观测参数偏差造成的系统扰动,为传统预测控制算法提供实时性扰动补偿,仿真结果显示有效改善了传统电流预测控制中PMSM参数扰动偏差造成的输出电流静差及振荡问题.文献[55 ]对基于fal函数的ESO进行改进,设计增益连续的ESO用于PMSM的电流解耦控制,对参数不确定性进行补偿.文献[56 ]中提出一种用于PMSM的基于扰动估计器的电流控制方法.文献[57 ]中开发一种自适应滑模电流控制器,基于滑模的扰动观测器能够提升电流环抗电气参数摄动的能力. ...
Uncertainty-and-disturbance- estimator-based current control scheme for PMSM drives with a simple parameter tuning algorithm
1
2017
... 如果将电阻、电感的标称值当作基本模型,从扰动的角度看,dq 轴的交叉耦合和电阻、电感参数摄动可以看作标称模型之外的扰动,因此可以通过ESO达到提高参数鲁棒性及动态解耦的目标.文 献[53 ]中提出一种基于增量模型和ESO的鲁棒电流预测控制,使用增量模型使预测模型无需转子磁链,通过ESO提高了电感失配时的鲁棒性.文献[54 ]中构建ESO来观测参数偏差造成的系统扰动,为传统预测控制算法提供实时性扰动补偿,仿真结果显示有效改善了传统电流预测控制中PMSM参数扰动偏差造成的输出电流静差及振荡问题.文献[55 ]对基于fal函数的ESO进行改进,设计增益连续的ESO用于PMSM的电流解耦控制,对参数不确定性进行补偿.文献[56 ]中提出一种用于PMSM的基于扰动估计器的电流控制方法.文献[57 ]中开发一种自适应滑模电流控制器,基于滑模的扰动观测器能够提升电流环抗电气参数摄动的能力. ...
Adaptive sliding mode current control with sliding mode disturbance observer for PMSM drives
1
2019
... 如果将电阻、电感的标称值当作基本模型,从扰动的角度看,dq 轴的交叉耦合和电阻、电感参数摄动可以看作标称模型之外的扰动,因此可以通过ESO达到提高参数鲁棒性及动态解耦的目标.文 献[53 ]中提出一种基于增量模型和ESO的鲁棒电流预测控制,使用增量模型使预测模型无需转子磁链,通过ESO提高了电感失配时的鲁棒性.文献[54 ]中构建ESO来观测参数偏差造成的系统扰动,为传统预测控制算法提供实时性扰动补偿,仿真结果显示有效改善了传统电流预测控制中PMSM参数扰动偏差造成的输出电流静差及振荡问题.文献[55 ]对基于fal函数的ESO进行改进,设计增益连续的ESO用于PMSM的电流解耦控制,对参数不确定性进行补偿.文献[56 ]中提出一种用于PMSM的基于扰动估计器的电流控制方法.文献[57 ]中开发一种自适应滑模电流控制器,基于滑模的扰动观测器能够提升电流环抗电气参数摄动的能力. ...
基于比例增益补偿的永磁同步电机转速平滑控制
1
2018
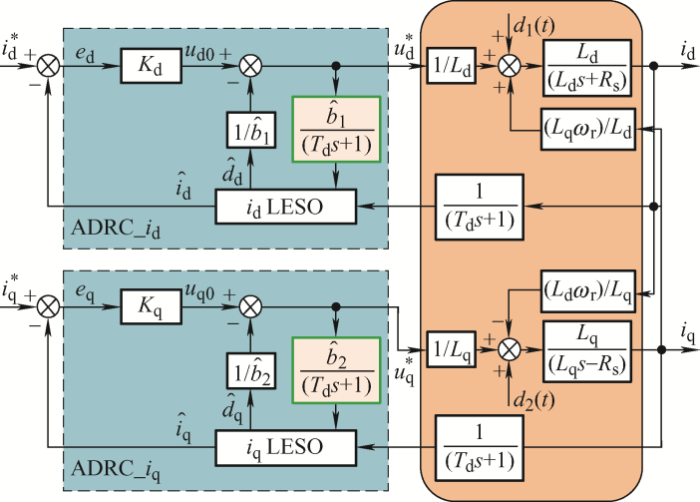
... 除了电阻、电感等参数摄动,电流环中还存在死区效应等其他非线性因素[58 ] .基于非线性ADRC的电流控制策略能够提高转矩控制性能[59 ] ,但是需要整定7个控制参数.文献[60 ]为满足工程实践需求,提出基于测量延迟补偿的LADRC电流控制策略,如图8 所示,通过频域法给出参数整定方法,试验结果表明对电阻、电感参数的敏感性降低,且无需额外的补偿算法即可降低死区效应的影响. ...
基于比例增益补偿的永磁同步电机转速平滑控制
1
2018
... 除了电阻、电感等参数摄动,电流环中还存在死区效应等其他非线性因素[58 ] .基于非线性ADRC的电流控制策略能够提高转矩控制性能[59 ] ,但是需要整定7个控制参数.文献[60 ]为满足工程实践需求,提出基于测量延迟补偿的LADRC电流控制策略,如图8 所示,通过频域法给出参数整定方法,试验结果表明对电阻、电感参数的敏感性降低,且无需额外的补偿算法即可降低死区效应的影响. ...
Research on active disturbance rejection control with parameter autotune mechanism for induction motors based on adaptive particle swarm optimization algorithm with dynamic inertia weight
1
2019
... 除了电阻、电感等参数摄动,电流环中还存在死区效应等其他非线性因素[58 ] .基于非线性ADRC的电流控制策略能够提高转矩控制性能[59 ] ,但是需要整定7个控制参数.文献[60 ]为满足工程实践需求,提出基于测量延迟补偿的LADRC电流控制策略,如图8 所示,通过频域法给出参数整定方法,试验结果表明对电阻、电感参数的敏感性降低,且无需额外的补偿算法即可降低死区效应的影响. ...
Measurement delay compensated LADRC based current controller design for PMSM drives with a simple parameter tuning method
1
2020
... 除了电阻、电感等参数摄动,电流环中还存在死区效应等其他非线性因素[58 ] .基于非线性ADRC的电流控制策略能够提高转矩控制性能[59 ] ,但是需要整定7个控制参数.文献[60 ]为满足工程实践需求,提出基于测量延迟补偿的LADRC电流控制策略,如图8 所示,通过频域法给出参数整定方法,试验结果表明对电阻、电感参数的敏感性降低,且无需额外的补偿算法即可降低死区效应的影响. ...
Torque-speed regulation of DC motor based on load torque estimation
1
1983
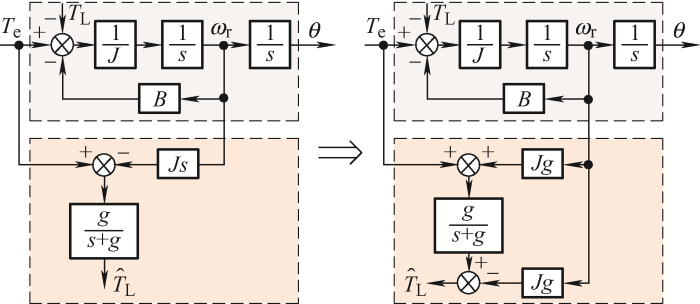
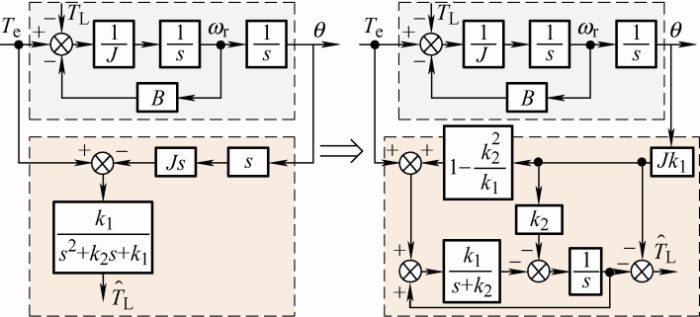
... 电机驱动系统中,为了降低负载转矩扰动对速度控制性能的影响,负载转矩观测器是一种行之有效的办法.日本OHISHI教授在直流电机调速系统中提出基于运动方程的负载转矩估计方法[61 ] ,该研究团队在运动控制的扰动观测领域耕耘多年,研究成果引起学术界的广泛关注[62 ] .其中,基于速度信息的负载转矩观测器如图9 所示,在伺服驱动中大量应用.而在运动控制中,也可从位置信息中提取负载转矩,设计的观测器如图10 所示.除此之外,文献[63 ]中根据系统机械运动方程,设计负载转矩观测器,并将其代入提出的模糊滑模控制器中.文献[64 ]设计一种基于扩展卡尔曼滤波的负载转矩观测器,利用前馈实现转矩补偿,提高噪声及参数不确定时的估计性能.文献[65 ]针对调速系统设计基于积分滑模的扰动观测器,提升预测控制的性能.文献[66 ]中设计改进滑模负载观测器,提高了动态定位过程中的抗负载扰动能力.上述文献均表明负载转矩观测和补偿能够提高调速系统的抗负载扰动能力,而设计一个高动态、高精度的扰动观测器则是关键. ...
1
2003
... 电机驱动系统中,为了降低负载转矩扰动对速度控制性能的影响,负载转矩观测器是一种行之有效的办法.日本OHISHI教授在直流电机调速系统中提出基于运动方程的负载转矩估计方法[61 ] ,该研究团队在运动控制的扰动观测领域耕耘多年,研究成果引起学术界的广泛关注[62 ] .其中,基于速度信息的负载转矩观测器如图9 所示,在伺服驱动中大量应用.而在运动控制中,也可从位置信息中提取负载转矩,设计的观测器如图10 所示.除此之外,文献[63 ]中根据系统机械运动方程,设计负载转矩观测器,并将其代入提出的模糊滑模控制器中.文献[64 ]设计一种基于扩展卡尔曼滤波的负载转矩观测器,利用前馈实现转矩补偿,提高噪声及参数不确定时的估计性能.文献[65 ]针对调速系统设计基于积分滑模的扰动观测器,提升预测控制的性能.文献[66 ]中设计改进滑模负载观测器,提高了动态定位过程中的抗负载扰动能力.上述文献均表明负载转矩观测和补偿能够提高调速系统的抗负载扰动能力,而设计一个高动态、高精度的扰动观测器则是关键. ...
Fuzzy sliding mode speed controller for PM synchronous motors with a load torque observer
1
2012
... 电机驱动系统中,为了降低负载转矩扰动对速度控制性能的影响,负载转矩观测器是一种行之有效的办法.日本OHISHI教授在直流电机调速系统中提出基于运动方程的负载转矩估计方法[61 ] ,该研究团队在运动控制的扰动观测领域耕耘多年,研究成果引起学术界的广泛关注[62 ] .其中,基于速度信息的负载转矩观测器如图9 所示,在伺服驱动中大量应用.而在运动控制中,也可从位置信息中提取负载转矩,设计的观测器如图10 所示.除此之外,文献[63 ]中根据系统机械运动方程,设计负载转矩观测器,并将其代入提出的模糊滑模控制器中.文献[64 ]设计一种基于扩展卡尔曼滤波的负载转矩观测器,利用前馈实现转矩补偿,提高噪声及参数不确定时的估计性能.文献[65 ]针对调速系统设计基于积分滑模的扰动观测器,提升预测控制的性能.文献[66 ]中设计改进滑模负载观测器,提高了动态定位过程中的抗负载扰动能力.上述文献均表明负载转矩观测和补偿能够提高调速系统的抗负载扰动能力,而设计一个高动态、高精度的扰动观测器则是关键. ...
永磁同步电机负载转矩观测器
1
2010
... 电机驱动系统中,为了降低负载转矩扰动对速度控制性能的影响,负载转矩观测器是一种行之有效的办法.日本OHISHI教授在直流电机调速系统中提出基于运动方程的负载转矩估计方法[61 ] ,该研究团队在运动控制的扰动观测领域耕耘多年,研究成果引起学术界的广泛关注[62 ] .其中,基于速度信息的负载转矩观测器如图9 所示,在伺服驱动中大量应用.而在运动控制中,也可从位置信息中提取负载转矩,设计的观测器如图10 所示.除此之外,文献[63 ]中根据系统机械运动方程,设计负载转矩观测器,并将其代入提出的模糊滑模控制器中.文献[64 ]设计一种基于扩展卡尔曼滤波的负载转矩观测器,利用前馈实现转矩补偿,提高噪声及参数不确定时的估计性能.文献[65 ]针对调速系统设计基于积分滑模的扰动观测器,提升预测控制的性能.文献[66 ]中设计改进滑模负载观测器,提高了动态定位过程中的抗负载扰动能力.上述文献均表明负载转矩观测和补偿能够提高调速系统的抗负载扰动能力,而设计一个高动态、高精度的扰动观测器则是关键. ...
永磁同步电机负载转矩观测器
1
2010
... 电机驱动系统中,为了降低负载转矩扰动对速度控制性能的影响,负载转矩观测器是一种行之有效的办法.日本OHISHI教授在直流电机调速系统中提出基于运动方程的负载转矩估计方法[61 ] ,该研究团队在运动控制的扰动观测领域耕耘多年,研究成果引起学术界的广泛关注[62 ] .其中,基于速度信息的负载转矩观测器如图9 所示,在伺服驱动中大量应用.而在运动控制中,也可从位置信息中提取负载转矩,设计的观测器如图10 所示.除此之外,文献[63 ]中根据系统机械运动方程,设计负载转矩观测器,并将其代入提出的模糊滑模控制器中.文献[64 ]设计一种基于扩展卡尔曼滤波的负载转矩观测器,利用前馈实现转矩补偿,提高噪声及参数不确定时的估计性能.文献[65 ]针对调速系统设计基于积分滑模的扰动观测器,提升预测控制的性能.文献[66 ]中设计改进滑模负载观测器,提高了动态定位过程中的抗负载扰动能力.上述文献均表明负载转矩观测和补偿能够提高调速系统的抗负载扰动能力,而设计一个高动态、高精度的扰动观测器则是关键. ...
FPGA-based predictive speed control for PMSM system using integral sliding-mode disturbance observer
1
2021
... 电机驱动系统中,为了降低负载转矩扰动对速度控制性能的影响,负载转矩观测器是一种行之有效的办法.日本OHISHI教授在直流电机调速系统中提出基于运动方程的负载转矩估计方法[61 ] ,该研究团队在运动控制的扰动观测领域耕耘多年,研究成果引起学术界的广泛关注[62 ] .其中,基于速度信息的负载转矩观测器如图9 所示,在伺服驱动中大量应用.而在运动控制中,也可从位置信息中提取负载转矩,设计的观测器如图10 所示.除此之外,文献[63 ]中根据系统机械运动方程,设计负载转矩观测器,并将其代入提出的模糊滑模控制器中.文献[64 ]设计一种基于扩展卡尔曼滤波的负载转矩观测器,利用前馈实现转矩补偿,提高噪声及参数不确定时的估计性能.文献[65 ]针对调速系统设计基于积分滑模的扰动观测器,提升预测控制的性能.文献[66 ]中设计改进滑模负载观测器,提高了动态定位过程中的抗负载扰动能力.上述文献均表明负载转矩观测和补偿能够提高调速系统的抗负载扰动能力,而设计一个高动态、高精度的扰动观测器则是关键. ...
A new load adaptive identification method based on an improved sliding mode observer for PMSM position servo system
1
2021
... 电机驱动系统中,为了降低负载转矩扰动对速度控制性能的影响,负载转矩观测器是一种行之有效的办法.日本OHISHI教授在直流电机调速系统中提出基于运动方程的负载转矩估计方法[61 ] ,该研究团队在运动控制的扰动观测领域耕耘多年,研究成果引起学术界的广泛关注[62 ] .其中,基于速度信息的负载转矩观测器如图9 所示,在伺服驱动中大量应用.而在运动控制中,也可从位置信息中提取负载转矩,设计的观测器如图10 所示.除此之外,文献[63 ]中根据系统机械运动方程,设计负载转矩观测器,并将其代入提出的模糊滑模控制器中.文献[64 ]设计一种基于扩展卡尔曼滤波的负载转矩观测器,利用前馈实现转矩补偿,提高噪声及参数不确定时的估计性能.文献[65 ]针对调速系统设计基于积分滑模的扰动观测器,提升预测控制的性能.文献[66 ]中设计改进滑模负载观测器,提高了动态定位过程中的抗负载扰动能力.上述文献均表明负载转矩观测和补偿能够提高调速系统的抗负载扰动能力,而设计一个高动态、高精度的扰动观测器则是关键. ...
Motion control for advanced mechatronics
1
1996
... 电机驱动系统中,为了降低负载转矩扰动对速度控制性能的影响,负载转矩观测器是一种行之有效的办法.日本OHISHI教授在直流电机调速系统中提出基于运动方程的负载转矩估计方法
[61 ] ,该研究团队在运动控制的扰动观测领域耕耘多年,研究成果引起学术界的广泛关注
[62 ] .其中,基于速度信息的负载转矩观测器如
图9 所示,在伺服驱动中大量应用.而在运动控制中,也可从位置信息中提取负载转矩,设计的观测器如
图10 所示.除此之外,文献[
63 ]中根据系统机械运动方程,设计负载转矩观测器,并将其代入提出的模糊滑模控制器中.文献[
64 ]设计一种基于扩展卡尔曼滤波的负载转矩观测器,利用前馈实现转矩补偿,提高噪声及参数不确定时的估计性能.文献[
65 ]针对调速系统设计基于积分滑模的扰动观测器,提升预测控制的性能.文献[
66 ]中设计改进滑模负载观测器,提高了动态定位过程中的抗负载扰动能力.上述文献均表明负载转矩观测和补偿能够提高调速系统的抗负载扰动能力,而设计一个高动态、高精度的扰动观测器则是关键.
图9 基于机械运动方程和速度信息的负载转矩观测器 ![]()
图10 基于位置信息的负载转矩观测器<sup>[<xref ref-type="bibr" rid="b67">67</xref>]</sup> ![]()
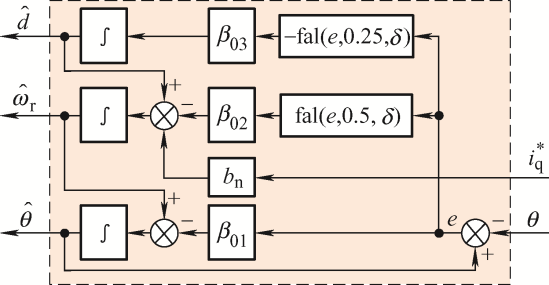
为了提高抗内部和外部总扰动的能力,自抗扰控制已用于伺服控制[43 , 68 ] .文献[69 ]用非线性ADRC取代传统的速度环,研究了调速系统抗电阻、电感参数摄动和负载转矩扰动性能,取得较好的控制效果.ESO是韩京清研究员在状态观测器的基础上提出的一种实用的扰动观测器[70 ] .文献[34 ]中通过ESO对PMSM伺服系统的扰动力矩进行估计,并依据观测的负载转矩对q 轴的电流指令进行修正,实现扰动力矩的抑制.文献[71 ]通过ESO估计系统扰动,通过对估计扰动量的前馈补偿,提高了速度环负载突变时的动态性能.图11 是基于位置信息和fal函数的非线性ESO,实现伺服系统的总扰动估计,ESO的输入是位置测量值θ 和q 轴电流指令值$i_{\rm{q}}^*$,输出变量 72 ]提出PMSM调速系统的模型补偿ADRC策略,将模型中已知部分补偿到ADRC中去,减小观测器的补偿量,提高了观测器的估计精度.文献[73 ]比较基于状态观测器的PD反馈控制和基于ESO的控制,提供一个新的抗扰思路.在不改变原状态观测器和PD反馈控制的基础上,通过增加扰动观测模块提高系统的抗扰性能. ...
基于自抗扰控制的永磁同步电机位置伺服系统一体化设计
1
2016
... 为了提高抗内部和外部总扰动的能力,自抗扰控制已用于伺服控制[43 , 68 ] .文献[69 ]用非线性ADRC取代传统的速度环,研究了调速系统抗电阻、电感参数摄动和负载转矩扰动性能,取得较好的控制效果.ESO是韩京清研究员在状态观测器的基础上提出的一种实用的扰动观测器[70 ] .文献[34 ]中通过ESO对PMSM伺服系统的扰动力矩进行估计,并依据观测的负载转矩对q 轴的电流指令进行修正,实现扰动力矩的抑制.文献[71 ]通过ESO估计系统扰动,通过对估计扰动量的前馈补偿,提高了速度环负载突变时的动态性能.图11 是基于位置信息和fal函数的非线性ESO,实现伺服系统的总扰动估计,ESO的输入是位置测量值θ 和q 轴电流指令值$i_{\rm{q}}^*$,输出变量 72 ]提出PMSM调速系统的模型补偿ADRC策略,将模型中已知部分补偿到ADRC中去,减小观测器的补偿量,提高了观测器的估计精度.文献[73 ]比较基于状态观测器的PD反馈控制和基于ESO的控制,提供一个新的抗扰思路.在不改变原状态观测器和PD反馈控制的基础上,通过增加扰动观测模块提高系统的抗扰性能. ...
基于自抗扰控制的永磁同步电机位置伺服系统一体化设计
1
2016
... 为了提高抗内部和外部总扰动的能力,自抗扰控制已用于伺服控制[43 , 68 ] .文献[69 ]用非线性ADRC取代传统的速度环,研究了调速系统抗电阻、电感参数摄动和负载转矩扰动性能,取得较好的控制效果.ESO是韩京清研究员在状态观测器的基础上提出的一种实用的扰动观测器[70 ] .文献[34 ]中通过ESO对PMSM伺服系统的扰动力矩进行估计,并依据观测的负载转矩对q 轴的电流指令进行修正,实现扰动力矩的抑制.文献[71 ]通过ESO估计系统扰动,通过对估计扰动量的前馈补偿,提高了速度环负载突变时的动态性能.图11 是基于位置信息和fal函数的非线性ESO,实现伺服系统的总扰动估计,ESO的输入是位置测量值θ 和q 轴电流指令值$i_{\rm{q}}^*$,输出变量 72 ]提出PMSM调速系统的模型补偿ADRC策略,将模型中已知部分补偿到ADRC中去,减小观测器的补偿量,提高了观测器的估计精度.文献[73 ]比较基于状态观测器的PD反馈控制和基于ESO的控制,提供一个新的抗扰思路.在不改变原状态观测器和PD反馈控制的基础上,通过增加扰动观测模块提高系统的抗扰性能. ...
Robust speed control of induction motor drives using first-order auto-disturbance rejection controllers
1
2015
... 为了提高抗内部和外部总扰动的能力,自抗扰控制已用于伺服控制[43 , 68 ] .文献[69 ]用非线性ADRC取代传统的速度环,研究了调速系统抗电阻、电感参数摄动和负载转矩扰动性能,取得较好的控制效果.ESO是韩京清研究员在状态观测器的基础上提出的一种实用的扰动观测器[70 ] .文献[34 ]中通过ESO对PMSM伺服系统的扰动力矩进行估计,并依据观测的负载转矩对q 轴的电流指令进行修正,实现扰动力矩的抑制.文献[71 ]通过ESO估计系统扰动,通过对估计扰动量的前馈补偿,提高了速度环负载突变时的动态性能.图11 是基于位置信息和fal函数的非线性ESO,实现伺服系统的总扰动估计,ESO的输入是位置测量值θ 和q 轴电流指令值$i_{\rm{q}}^*$,输出变量 72 ]提出PMSM调速系统的模型补偿ADRC策略,将模型中已知部分补偿到ADRC中去,减小观测器的补偿量,提高了观测器的估计精度.文献[73 ]比较基于状态观测器的PD反馈控制和基于ESO的控制,提供一个新的抗扰思路.在不改变原状态观测器和PD反馈控制的基础上,通过增加扰动观测模块提高系统的抗扰性能. ...
从PID技术到“自抗扰控制”技术
1
2002
... 为了提高抗内部和外部总扰动的能力,自抗扰控制已用于伺服控制[43 , 68 ] .文献[69 ]用非线性ADRC取代传统的速度环,研究了调速系统抗电阻、电感参数摄动和负载转矩扰动性能,取得较好的控制效果.ESO是韩京清研究员在状态观测器的基础上提出的一种实用的扰动观测器[70 ] .文献[34 ]中通过ESO对PMSM伺服系统的扰动力矩进行估计,并依据观测的负载转矩对q 轴的电流指令进行修正,实现扰动力矩的抑制.文献[71 ]通过ESO估计系统扰动,通过对估计扰动量的前馈补偿,提高了速度环负载突变时的动态性能.图11 是基于位置信息和fal函数的非线性ESO,实现伺服系统的总扰动估计,ESO的输入是位置测量值θ 和q 轴电流指令值$i_{\rm{q}}^*$,输出变量 72 ]提出PMSM调速系统的模型补偿ADRC策略,将模型中已知部分补偿到ADRC中去,减小观测器的补偿量,提高了观测器的估计精度.文献[73 ]比较基于状态观测器的PD反馈控制和基于ESO的控制,提供一个新的抗扰思路.在不改变原状态观测器和PD反馈控制的基础上,通过增加扰动观测模块提高系统的抗扰性能. ...
从PID技术到“自抗扰控制”技术
1
2002
... 为了提高抗内部和外部总扰动的能力,自抗扰控制已用于伺服控制[43 , 68 ] .文献[69 ]用非线性ADRC取代传统的速度环,研究了调速系统抗电阻、电感参数摄动和负载转矩扰动性能,取得较好的控制效果.ESO是韩京清研究员在状态观测器的基础上提出的一种实用的扰动观测器[70 ] .文献[34 ]中通过ESO对PMSM伺服系统的扰动力矩进行估计,并依据观测的负载转矩对q 轴的电流指令进行修正,实现扰动力矩的抑制.文献[71 ]通过ESO估计系统扰动,通过对估计扰动量的前馈补偿,提高了速度环负载突变时的动态性能.图11 是基于位置信息和fal函数的非线性ESO,实现伺服系统的总扰动估计,ESO的输入是位置测量值θ 和q 轴电流指令值$i_{\rm{q}}^*$,输出变量 72 ]提出PMSM调速系统的模型补偿ADRC策略,将模型中已知部分补偿到ADRC中去,减小观测器的补偿量,提高了观测器的估计精度.文献[73 ]比较基于状态观测器的PD反馈控制和基于ESO的控制,提供一个新的抗扰思路.在不改变原状态观测器和PD反馈控制的基础上,通过增加扰动观测模块提高系统的抗扰性能. ...
基于广义预测控制和扩展状态观测器的永磁同步电机控制
1
2015
... 为了提高抗内部和外部总扰动的能力,自抗扰控制已用于伺服控制[43 , 68 ] .文献[69 ]用非线性ADRC取代传统的速度环,研究了调速系统抗电阻、电感参数摄动和负载转矩扰动性能,取得较好的控制效果.ESO是韩京清研究员在状态观测器的基础上提出的一种实用的扰动观测器[70 ] .文献[34 ]中通过ESO对PMSM伺服系统的扰动力矩进行估计,并依据观测的负载转矩对q 轴的电流指令进行修正,实现扰动力矩的抑制.文献[71 ]通过ESO估计系统扰动,通过对估计扰动量的前馈补偿,提高了速度环负载突变时的动态性能.图11 是基于位置信息和fal函数的非线性ESO,实现伺服系统的总扰动估计,ESO的输入是位置测量值θ 和q 轴电流指令值$i_{\rm{q}}^*$,输出变量 72 ]提出PMSM调速系统的模型补偿ADRC策略,将模型中已知部分补偿到ADRC中去,减小观测器的补偿量,提高了观测器的估计精度.文献[73 ]比较基于状态观测器的PD反馈控制和基于ESO的控制,提供一个新的抗扰思路.在不改变原状态观测器和PD反馈控制的基础上,通过增加扰动观测模块提高系统的抗扰性能. ...
基于广义预测控制和扩展状态观测器的永磁同步电机控制
1
2015
... 为了提高抗内部和外部总扰动的能力,自抗扰控制已用于伺服控制[43 , 68 ] .文献[69 ]用非线性ADRC取代传统的速度环,研究了调速系统抗电阻、电感参数摄动和负载转矩扰动性能,取得较好的控制效果.ESO是韩京清研究员在状态观测器的基础上提出的一种实用的扰动观测器[70 ] .文献[34 ]中通过ESO对PMSM伺服系统的扰动力矩进行估计,并依据观测的负载转矩对q 轴的电流指令进行修正,实现扰动力矩的抑制.文献[71 ]通过ESO估计系统扰动,通过对估计扰动量的前馈补偿,提高了速度环负载突变时的动态性能.图11 是基于位置信息和fal函数的非线性ESO,实现伺服系统的总扰动估计,ESO的输入是位置测量值θ 和q 轴电流指令值$i_{\rm{q}}^*$,输出变量 72 ]提出PMSM调速系统的模型补偿ADRC策略,将模型中已知部分补偿到ADRC中去,减小观测器的补偿量,提高了观测器的估计精度.文献[73 ]比较基于状态观测器的PD反馈控制和基于ESO的控制,提供一个新的抗扰思路.在不改变原状态观测器和PD反馈控制的基础上,通过增加扰动观测模块提高系统的抗扰性能. ...
基于永磁同步电机模型辨识与补偿的自抗扰控制器
1
2008
... 为了提高抗内部和外部总扰动的能力,自抗扰控制已用于伺服控制[43 , 68 ] .文献[69 ]用非线性ADRC取代传统的速度环,研究了调速系统抗电阻、电感参数摄动和负载转矩扰动性能,取得较好的控制效果.ESO是韩京清研究员在状态观测器的基础上提出的一种实用的扰动观测器[70 ] .文献[34 ]中通过ESO对PMSM伺服系统的扰动力矩进行估计,并依据观测的负载转矩对q 轴的电流指令进行修正,实现扰动力矩的抑制.文献[71 ]通过ESO估计系统扰动,通过对估计扰动量的前馈补偿,提高了速度环负载突变时的动态性能.图11 是基于位置信息和fal函数的非线性ESO,实现伺服系统的总扰动估计,ESO的输入是位置测量值θ 和q 轴电流指令值$i_{\rm{q}}^*$,输出变量 72 ]提出PMSM调速系统的模型补偿ADRC策略,将模型中已知部分补偿到ADRC中去,减小观测器的补偿量,提高了观测器的估计精度.文献[73 ]比较基于状态观测器的PD反馈控制和基于ESO的控制,提供一个新的抗扰思路.在不改变原状态观测器和PD反馈控制的基础上,通过增加扰动观测模块提高系统的抗扰性能. ...
基于永磁同步电机模型辨识与补偿的自抗扰控制器
1
2008
... 为了提高抗内部和外部总扰动的能力,自抗扰控制已用于伺服控制[43 , 68 ] .文献[69 ]用非线性ADRC取代传统的速度环,研究了调速系统抗电阻、电感参数摄动和负载转矩扰动性能,取得较好的控制效果.ESO是韩京清研究员在状态观测器的基础上提出的一种实用的扰动观测器[70 ] .文献[34 ]中通过ESO对PMSM伺服系统的扰动力矩进行估计,并依据观测的负载转矩对q 轴的电流指令进行修正,实现扰动力矩的抑制.文献[71 ]通过ESO估计系统扰动,通过对估计扰动量的前馈补偿,提高了速度环负载突变时的动态性能.图11 是基于位置信息和fal函数的非线性ESO,实现伺服系统的总扰动估计,ESO的输入是位置测量值θ 和q 轴电流指令值$i_{\rm{q}}^*$,输出变量 72 ]提出PMSM调速系统的模型补偿ADRC策略,将模型中已知部分补偿到ADRC中去,减小观测器的补偿量,提高了观测器的估计精度.文献[73 ]比较基于状态观测器的PD反馈控制和基于ESO的控制,提供一个新的抗扰思路.在不改变原状态观测器和PD反馈控制的基础上,通过增加扰动观测模块提高系统的抗扰性能. ...
Add-on module of active disturbance rejection for set-point tracking of motion control systems
1
2017
... 为了提高抗内部和外部总扰动的能力,自抗扰控制已用于伺服控制[43 , 68 ] .文献[69 ]用非线性ADRC取代传统的速度环,研究了调速系统抗电阻、电感参数摄动和负载转矩扰动性能,取得较好的控制效果.ESO是韩京清研究员在状态观测器的基础上提出的一种实用的扰动观测器[70 ] .文献[34 ]中通过ESO对PMSM伺服系统的扰动力矩进行估计,并依据观测的负载转矩对q 轴的电流指令进行修正,实现扰动力矩的抑制.文献[71 ]通过ESO估计系统扰动,通过对估计扰动量的前馈补偿,提高了速度环负载突变时的动态性能.图11 是基于位置信息和fal函数的非线性ESO,实现伺服系统的总扰动估计,ESO的输入是位置测量值θ 和q 轴电流指令值$i_{\rm{q}}^*$,输出变量 72 ]提出PMSM调速系统的模型补偿ADRC策略,将模型中已知部分补偿到ADRC中去,减小观测器的补偿量,提高了观测器的估计精度.文献[73 ]比较基于状态观测器的PD反馈控制和基于ESO的控制,提供一个新的抗扰思路.在不改变原状态观测器和PD反馈控制的基础上,通过增加扰动观测模块提高系统的抗扰性能. ...
Research on autodisturbance-rejection control of induction motors based on an ant colony optimization algorithm
1
2018
... 通过上述文献分析可以发现,ESO在电机驱动中可以取得很好的控制效果,但是限制其在工程实践中推广应用的一个重要因素是非线性ESO的参数整定.文献[74 ]针对速度控制的自抗扰控制器,提出基于蚁群算法的参数整定方法,并对算法的计算量进行了分析.文献[75 ]通过描述函数法分析非线性ESO.可以看出,当前非线性ESO的参数整定还存在一定的难度. ...
Frequency-domain analysis of nonlinear active disturbance rejection control via the describing function method
1
2013
... 通过上述文献分析可以发现,ESO在电机驱动中可以取得很好的控制效果,但是限制其在工程实践中推广应用的一个重要因素是非线性ESO的参数整定.文献[74 ]针对速度控制的自抗扰控制器,提出基于蚁群算法的参数整定方法,并对算法的计算量进行了分析.文献[75 ]通过描述函数法分析非线性ESO.可以看出,当前非线性ESO的参数整定还存在一定的难度. ...
Scaling and bandwidth-parameterization based controller tuning
1
2003
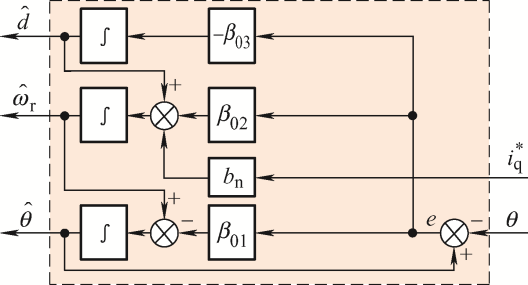
... 为了提高伺服系统的抗扰性能,且方便在工程实践中应用,研究性能优异且整定参数简单的自抗扰控制方法是十分必要的.文献[76 ]提出线性自抗扰控制(LADRC),通过极点配置和带宽的概念,给出了线性ESO的参数整定方法,与非线性ADRC相比简化了参数整定,LADRC的工业应用逐渐得到更多关注[77 ] ,2013年,德州仪器(Texas Instruments, TI)公司的MotorWare电机解决方案集成由LineStream Technologies公司提供支持的自抗扰控制软件包.文献[78 ]提出基于LADRC的调速系统,改善了对参数摄动和负载扰动的抑制能力.文献[79 ]提出一种用于PMSM的基于广义PI观测器的自抗扰控制器,仿真结果显示对于不确定的负载变化,速度控制性能依然是鲁棒的.图12 是基于位置信息的线性ESO结构框图,与图11 所示的非线性ESO相比,线性ESO没有非线性的fal函数,可采用频域分析法整定参数,整定方法更为简洁[80 ] . ...
Half-gain tuning for active disturbance rejection control
1
2020
... 为了提高伺服系统的抗扰性能,且方便在工程实践中应用,研究性能优异且整定参数简单的自抗扰控制方法是十分必要的.文献[76 ]提出线性自抗扰控制(LADRC),通过极点配置和带宽的概念,给出了线性ESO的参数整定方法,与非线性ADRC相比简化了参数整定,LADRC的工业应用逐渐得到更多关注[77 ] ,2013年,德州仪器(Texas Instruments, TI)公司的MotorWare电机解决方案集成由LineStream Technologies公司提供支持的自抗扰控制软件包.文献[78 ]提出基于LADRC的调速系统,改善了对参数摄动和负载扰动的抑制能力.文献[79 ]提出一种用于PMSM的基于广义PI观测器的自抗扰控制器,仿真结果显示对于不确定的负载变化,速度控制性能依然是鲁棒的.图12 是基于位置信息的线性ESO结构框图,与图11 所示的非线性ESO相比,线性ESO没有非线性的fal函数,可采用频域分析法整定参数,整定方法更为简洁[80 ] . ...
Disturbance rejection control method for permanent magnet synchronous motor speed-regulation system
1
2012
... 为了提高伺服系统的抗扰性能,且方便在工程实践中应用,研究性能优异且整定参数简单的自抗扰控制方法是十分必要的.文献[76 ]提出线性自抗扰控制(LADRC),通过极点配置和带宽的概念,给出了线性ESO的参数整定方法,与非线性ADRC相比简化了参数整定,LADRC的工业应用逐渐得到更多关注[77 ] ,2013年,德州仪器(Texas Instruments, TI)公司的MotorWare电机解决方案集成由LineStream Technologies公司提供支持的自抗扰控制软件包.文献[78 ]提出基于LADRC的调速系统,改善了对参数摄动和负载扰动的抑制能力.文献[79 ]提出一种用于PMSM的基于广义PI观测器的自抗扰控制器,仿真结果显示对于不确定的负载变化,速度控制性能依然是鲁棒的.图12 是基于位置信息的线性ESO结构框图,与图11 所示的非线性ESO相比,线性ESO没有非线性的fal函数,可采用频域分析法整定参数,整定方法更为简洁[80 ] . ...
On the control of the permanent magnet synchronous motor: An active disturbance rejection control approach
1
2014
... 为了提高伺服系统的抗扰性能,且方便在工程实践中应用,研究性能优异且整定参数简单的自抗扰控制方法是十分必要的.文献[76 ]提出线性自抗扰控制(LADRC),通过极点配置和带宽的概念,给出了线性ESO的参数整定方法,与非线性ADRC相比简化了参数整定,LADRC的工业应用逐渐得到更多关注[77 ] ,2013年,德州仪器(Texas Instruments, TI)公司的MotorWare电机解决方案集成由LineStream Technologies公司提供支持的自抗扰控制软件包.文献[78 ]提出基于LADRC的调速系统,改善了对参数摄动和负载扰动的抑制能力.文献[79 ]提出一种用于PMSM的基于广义PI观测器的自抗扰控制器,仿真结果显示对于不确定的负载变化,速度控制性能依然是鲁棒的.图12 是基于位置信息的线性ESO结构框图,与图11 所示的非线性ESO相比,线性ESO没有非线性的fal函数,可采用频域分析法整定参数,整定方法更为简洁[80 ] . ...
Adaptive LADRC-based disturbance rejection method for electromechanical servo system
2
2020
... 为了提高伺服系统的抗扰性能,且方便在工程实践中应用,研究性能优异且整定参数简单的自抗扰控制方法是十分必要的.文献[76 ]提出线性自抗扰控制(LADRC),通过极点配置和带宽的概念,给出了线性ESO的参数整定方法,与非线性ADRC相比简化了参数整定,LADRC的工业应用逐渐得到更多关注[77 ] ,2013年,德州仪器(Texas Instruments, TI)公司的MotorWare电机解决方案集成由LineStream Technologies公司提供支持的自抗扰控制软件包.文献[78 ]提出基于LADRC的调速系统,改善了对参数摄动和负载扰动的抑制能力.文献[79 ]提出一种用于PMSM的基于广义PI观测器的自抗扰控制器,仿真结果显示对于不确定的负载变化,速度控制性能依然是鲁棒的.图12 是基于位置信息的线性ESO结构框图,与图11 所示的非线性ESO相比,线性ESO没有非线性的fal函数,可采用频域分析法整定参数,整定方法更为简洁[80 ] . ...
... 控制系统的带宽对动态性能影响很大.高带宽有利于提升抗扰动能力,然而低带宽能够降低噪声敏感性,这与强抗扰的高带宽要求矛盾.因此,伺服控制系统中带宽选择是受限的.ESO中扰动估计和噪声抑制性能之间的矛盾需要进一步研究[87 ] .文献[88 ]中指出基于fal函数的ESO比线性ESO的抑制噪声的能力更强.文献[89 ]中分析了调速系统中的抗扰和噪声抑制的关系.在高动态位置控制中,文献[80 ]结合LADRC,推导抗扰动和噪声敏感性的定量关系,为后续的深入研究奠定理论和应用基础.虽然取得一些初步结论,但抗扰和降噪的优化控制仍有待完善,是ADRC一个重要的研究方向. ...
Design and implementation of bounded finite-time control algorithm for speed regulation of permanent magnet synchronous motor
1
2021
... 尽管基于fal函数的非线性ESO和线性ESO对常值扰动具有很好的估计性能,然而EMA中常出现高阶扰动,因此有限时间控制的另一个难点在于有限时间收敛ESO的设计.不仅涉及ESO对不同类型扰动的估计能力,也要兼顾测量噪声.文献[81 ]中设计有限时间收敛的速度控制器和扰动观测器,提高PMSM转速控制的响应速度.文献[82 ]中设计自适应周期扰动观测器用以抑制周期变化的扰动.基于多重积分的高阶线性扰动观测器额能够实现对斜坡负载扰动的准确估计[83 ] ,但高阶线性观测器的相位延迟比较严重.文献[84 ]中通过非线性内模控制方法提高伺服系统对正弦扰动的抑制能力.基于高阶滑模观测器的扰动观测器能够提高抑制高阶扰动的能力[85 ] ,但基于函数|e |α e )(0<α <1)的观测器在观测误差较大时的收敛速度仍有改进空间. ...
An adaptive periodic-disturbance observer for periodic-disturbance suppression
1
2018
... 尽管基于fal函数的非线性ESO和线性ESO对常值扰动具有很好的估计性能,然而EMA中常出现高阶扰动,因此有限时间控制的另一个难点在于有限时间收敛ESO的设计.不仅涉及ESO对不同类型扰动的估计能力,也要兼顾测量噪声.文献[81 ]中设计有限时间收敛的速度控制器和扰动观测器,提高PMSM转速控制的响应速度.文献[82 ]中设计自适应周期扰动观测器用以抑制周期变化的扰动.基于多重积分的高阶线性扰动观测器额能够实现对斜坡负载扰动的准确估计[83 ] ,但高阶线性观测器的相位延迟比较严重.文献[84 ]中通过非线性内模控制方法提高伺服系统对正弦扰动的抑制能力.基于高阶滑模观测器的扰动观测器能够提高抑制高阶扰动的能力[85 ] ,但基于函数|e |α e )(0<α <1)的观测器在观测误差较大时的收敛速度仍有改进空间. ...
Disturbance observer for estimating higher order disturbances in time series expansion
1
2010
... 尽管基于fal函数的非线性ESO和线性ESO对常值扰动具有很好的估计性能,然而EMA中常出现高阶扰动,因此有限时间控制的另一个难点在于有限时间收敛ESO的设计.不仅涉及ESO对不同类型扰动的估计能力,也要兼顾测量噪声.文献[81 ]中设计有限时间收敛的速度控制器和扰动观测器,提高PMSM转速控制的响应速度.文献[82 ]中设计自适应周期扰动观测器用以抑制周期变化的扰动.基于多重积分的高阶线性扰动观测器额能够实现对斜坡负载扰动的准确估计[83 ] ,但高阶线性观测器的相位延迟比较严重.文献[84 ]中通过非线性内模控制方法提高伺服系统对正弦扰动的抑制能力.基于高阶滑模观测器的扰动观测器能够提高抑制高阶扰动的能力[85 ] ,但基于函数|e |α e )(0<α <1)的观测器在观测误差较大时的收敛速度仍有改进空间. ...
Internal model control of PMSM position servo system:Theory and experimental results
1
2020
... 尽管基于fal函数的非线性ESO和线性ESO对常值扰动具有很好的估计性能,然而EMA中常出现高阶扰动,因此有限时间控制的另一个难点在于有限时间收敛ESO的设计.不仅涉及ESO对不同类型扰动的估计能力,也要兼顾测量噪声.文献[81 ]中设计有限时间收敛的速度控制器和扰动观测器,提高PMSM转速控制的响应速度.文献[82 ]中设计自适应周期扰动观测器用以抑制周期变化的扰动.基于多重积分的高阶线性扰动观测器额能够实现对斜坡负载扰动的准确估计[83 ] ,但高阶线性观测器的相位延迟比较严重.文献[84 ]中通过非线性内模控制方法提高伺服系统对正弦扰动的抑制能力.基于高阶滑模观测器的扰动观测器能够提高抑制高阶扰动的能力[85 ] ,但基于函数|e |α e )(0<α <1)的观测器在观测误差较大时的收敛速度仍有改进空间. ...
Semiglobal finite-time trajectory tracking realization for disturbed nonlinear systems via higher-order sliding modes
1
2020
... 尽管基于fal函数的非线性ESO和线性ESO对常值扰动具有很好的估计性能,然而EMA中常出现高阶扰动,因此有限时间控制的另一个难点在于有限时间收敛ESO的设计.不仅涉及ESO对不同类型扰动的估计能力,也要兼顾测量噪声.文献[81 ]中设计有限时间收敛的速度控制器和扰动观测器,提高PMSM转速控制的响应速度.文献[82 ]中设计自适应周期扰动观测器用以抑制周期变化的扰动.基于多重积分的高阶线性扰动观测器额能够实现对斜坡负载扰动的准确估计[83 ] ,但高阶线性观测器的相位延迟比较严重.文献[84 ]中通过非线性内模控制方法提高伺服系统对正弦扰动的抑制能力.基于高阶滑模观测器的扰动观测器能够提高抑制高阶扰动的能力[85 ] ,但基于函数|e |α e )(0<α <1)的观测器在观测误差较大时的收敛速度仍有改进空间. ...
Finite-time convergent multiple disturbance rejection control for electromechanical actuators
1
2021
... 鉴于参数α 的不同取值对闭环收敛特性有直接影响,文献[86 ]对基于传统的fal函数的非线性闭环控制律进行改进,提出一个新型非线性切换函数falN,见式(6).falN函数兼具光滑函数(α N1 >1)和非光滑函数(0<α N2 <1)的优势. ...
Noise reduction disturbance observer for disturbance attenuation and noise suppression
1
2017
... 控制系统的带宽对动态性能影响很大.高带宽有利于提升抗扰动能力,然而低带宽能够降低噪声敏感性,这与强抗扰的高带宽要求矛盾.因此,伺服控制系统中带宽选择是受限的.ESO中扰动估计和噪声抑制性能之间的矛盾需要进一步研究[87 ] .文献[88 ]中指出基于fal函数的ESO比线性ESO的抑制噪声的能力更强.文献[89 ]中分析了调速系统中的抗扰和噪声抑制的关系.在高动态位置控制中,文献[80 ]结合LADRC,推导抗扰动和噪声敏感性的定量关系,为后续的深入研究奠定理论和应用基础.虽然取得一些初步结论,但抗扰和降噪的优化控制仍有待完善,是ADRC一个重要的研究方向. ...
1
2019
... 控制系统的带宽对动态性能影响很大.高带宽有利于提升抗扰动能力,然而低带宽能够降低噪声敏感性,这与强抗扰的高带宽要求矛盾.因此,伺服控制系统中带宽选择是受限的.ESO中扰动估计和噪声抑制性能之间的矛盾需要进一步研究[87 ] .文献[88 ]中指出基于fal函数的ESO比线性ESO的抑制噪声的能力更强.文献[89 ]中分析了调速系统中的抗扰和噪声抑制的关系.在高动态位置控制中,文献[80 ]结合LADRC,推导抗扰动和噪声敏感性的定量关系,为后续的深入研究奠定理论和应用基础.虽然取得一些初步结论,但抗扰和降噪的优化控制仍有待完善,是ADRC一个重要的研究方向. ...
1
2019
... 控制系统的带宽对动态性能影响很大.高带宽有利于提升抗扰动能力,然而低带宽能够降低噪声敏感性,这与强抗扰的高带宽要求矛盾.因此,伺服控制系统中带宽选择是受限的.ESO中扰动估计和噪声抑制性能之间的矛盾需要进一步研究[87 ] .文献[88 ]中指出基于fal函数的ESO比线性ESO的抑制噪声的能力更强.文献[89 ]中分析了调速系统中的抗扰和噪声抑制的关系.在高动态位置控制中,文献[80 ]结合LADRC,推导抗扰动和噪声敏感性的定量关系,为后续的深入研究奠定理论和应用基础.虽然取得一些初步结论,但抗扰和降噪的优化控制仍有待完善,是ADRC一个重要的研究方向. ...
Active disturbance rejection controller for speed control of electrical drives using phase-locking loop observer
1
2019
... 控制系统的带宽对动态性能影响很大.高带宽有利于提升抗扰动能力,然而低带宽能够降低噪声敏感性,这与强抗扰的高带宽要求矛盾.因此,伺服控制系统中带宽选择是受限的.ESO中扰动估计和噪声抑制性能之间的矛盾需要进一步研究[87 ] .文献[88 ]中指出基于fal函数的ESO比线性ESO的抑制噪声的能力更强.文献[89 ]中分析了调速系统中的抗扰和噪声抑制的关系.在高动态位置控制中,文献[80 ]结合LADRC,推导抗扰动和噪声敏感性的定量关系,为后续的深入研究奠定理论和应用基础.虽然取得一些初步结论,但抗扰和降噪的优化控制仍有待完善,是ADRC一个重要的研究方向. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}