


1 引言
机器人技术是机械工业领域的核心技术之一,以工业机器人等为主体的技术与装备将成为未来制造强国的重要标志,在促进我国智能制造的发展,推动工业机器人产业化突破方面具有重要的意义[1]。本文主要围绕工业机器人三大关键零部件核心技术之一的高性能交流永磁同步电机(Permanent Maynet Synchronous Motor,PMSM)展开研究,对工业机器人用伺服电机的特殊要求之一(转矩波动性)进行分析。根据PMSM的工作原理,PMSM是利用定子的电枢磁场与转子的主磁极磁场相互作用,产生电机转矩驱动转子转动,从而驱使电机工作。转矩波动是影响电机转矩运行稳定的关键因素,是衡量永磁电机性能好坏的重要参考值。其主要来源有以下几方面:气隙磁通密度波形畸变、反电动势谐波、齿槽转矩以及驱动电流谐波。因此,解决转矩波动产生的问题,对永磁同步电机的运行性能至关重要,同时,保持较低的转矩波动有利于永磁同步电机的转矩稳定输出,确保工业机器人动作时的准确性和平稳性[2]。
文献[3]从转子静态偏心的角度考虑,通过数学推导和有限元方法对比分析,验证了GCD(Z,2p) ≥1的情况下,对电机气隙磁通密度、空载反电动势和转矩波动的影响;文献[4]提出磁钢分段斜极角的设计方法,改善了电机负载时的气隙磁通密度和反电动势波形,降低了气隙磁通密度和反电动势波形的畸变率,同时削弱了转矩波动;文献[5]总结归纳了导致转矩波动的因素,分别从电动机本体设计、电机结构和加工工艺、运行方式以及驱动控制器等方面阐述了转矩波动产生的机理和特点,重点讨论了因电磁原因引起的转矩波动;文献[6]基于传统的占空比调制的永磁同步电机直接转矩控制(Direct Torque Control,DTC)方法,通过分析有效电压矢量和零矢量对转矩波动和磁链波动的影响选择占空比计算方法,同时引入零矢量改变传统的开关表,可以有效减小转矩波动和磁链波动;文献[7]分别从分数槽、极弧系数、削角以及降低频率等方面进行了转矩波动的对比,为优化永磁同步电机提供了参考依据。
本文以一台工业机器人用36槽8极永磁同步电动机为对象,提出定子齿冠偏心内凹结构。针对该电机的转矩波动性,对不同偏心距下的电机模型进行了有限元仿真分析,研究了齿冠偏心控制在合理区间内的电机气隙磁场总谐波畸变率(Total Harmonic Distortion,THD)、反电动势THD以及转矩波动系数,分析了齿冠偏心内凹对于齿槽转矩的影响。
2 定子齿冠偏心内凹结构理论分析与设计
永磁同步电机的气隙磁通密度在很大程度上影响了电机的反电动势、转矩波动等的电机性能,所以气隙磁通密度波形的优劣直接影响电机性能的优劣。永磁电机在合适的气隙磁通密度波形下(正弦性),可以减小气隙磁通密度谐波,有效地削弱电机转矩波动。
图1

图1
单个定子齿冠偏心前和偏心后的对比
Fig.1
Comparison of before and after eccentricity of a single stator tooth
图2
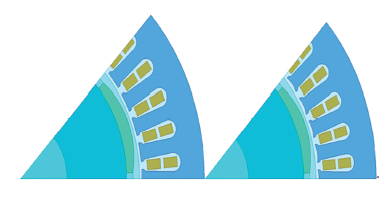
图2
1/8圆的定子齿冠偏心前和偏心后的对比
Fig.2
Comparison of before and after eccentricity of stator teeth of the 1/8-round
本文提出的齿冠偏心内凹结构具体设计如图3所示。
图3
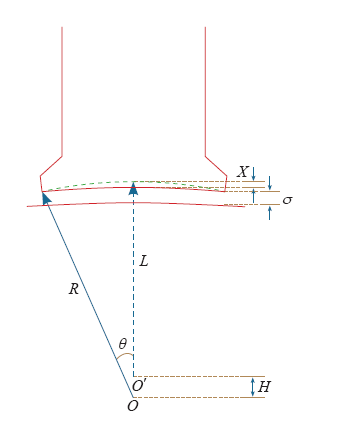
图3中,O为电机定子(转子、转轴)轴心;O′为齿冠偏心中心;R为原始结构定子半径;H为偏心距;L为偏心半径;X为偏心导致的定子齿内凹长度;θ为半个定子齿冠对应机械角度,则电机定子半径rchange = H + L。保持齿冠两端气隙长度σ不变的情况下,改变偏心距H,依据定子结构有如下关系式
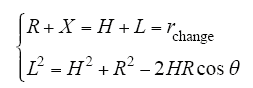
由式(1)可得偏心距H与定子齿冠内凹长度X之间的关系为

可以看出,随着偏心距H的增大,定子齿冠内凹长度X不断增加。这样定子齿冠中部气隙长度变宽,而定子齿冠两端气隙长度不变,使得不均匀气隙长度沿圆周方向由大变小,再由小变大,呈正弦规律变化,使气隙磁场波形保持较好的正弦性,从而对气隙谐波畸变率和转矩波动起到抑制作用[8]。
3 PMSM转矩波动及仿真分析
针对36槽8极工业机器人用永磁同步电动机,采用ANSYS Maxwell 2D建立电机偏心模型,齿冠偏心取值区间为0~70mm,每次间隔5mm,直至最大偏心距结束仿真分析。根据仿真结果,对频谱分析图及快速傅里叶变换(FFT)分析图进行数据转换并作预处理,分别计算气隙磁场THD、反电动势THD和转矩波动系数。通过Matlab数学软件编辑评价气隙磁通密度波形和反电动势波形正弦性的THD计算式,即
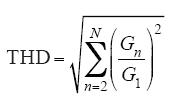
式中,N为预处理后选定范围的谐波最高次数;G1为基波幅值;Gn为谐波幅值。同时,转矩波动系数K计算式为
式中,Tmax为稳态下输出转矩的最大值;Tmin为稳态下输出转矩的最小值。
最后齿冠偏心内凹的气隙磁通密度基波幅值、反电动势基波幅值、气隙磁通密度THD,反电动势THD以及转矩波动系数的数据汇总见表1。
表1 不同偏心距的计算结果
Tab.1
| 偏心距离 /mm | 气隙磁通密度 | 反电动势 | 转矩波动 系数K(%) | ||
|---|---|---|---|---|---|
| 基波幅值/T | THD(%) | 基波幅值/T | THD(%) | ||
| 0 | 0.866 4 | 28.65 | 263.810 0 | 17.20 | 8.81 |
| 5 | 0.866 1 | 28.67 | 263.804 5 | 17.13 | 8.79 |
| 10 | 0.865 2 | 28.60 | 263.743 1 | 17.12 | 8.73 |
| 15 | 0.864 9 | 28.51 | 263.705 6 | 17.09 | 8.70 |
| 20 | 0.864 2 | 28.47 | 263.659 4 | 17.04 | 8.65 |
| 25 | 0.863 6 | 28.38 | 263.611 4 | 17.01 | 8.61 |
| 30 | 0.862 7 | 28.28 | 263.543 6 | 16.99 | 8.55 |
| 35 | 0.861 7 | 28.19 | 263.458 0 | 16.96 | 8.51 |
| 40 | 0.860 4 | 27.98 | 263.350 1 | 16.94 | 8.46 |
| 45 | 0.858 7 | 27.85 | 263.205 5 | 16.93 | 8.43 |
| 50 | 0.856 5 | 27.60 | 262.997 8 | 16.92 | 8.31 |
| 55 | 0.853 5 | 27.19 | 262.691 1 | 16.90 | 8.14 |
| 60 | 0.848 6 | 26.62 | 262.190 7 | 16.90 | 7.86 |
| 65 | 0.838 5 | 25.60 | 261.033 0 | 16.87 | 7.34 |
| 70 | 0.814 4 | 24.12 | 257.703 7 | 15.07 | 5.68 |
图4
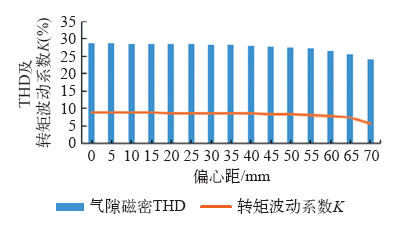
图4
不同偏心距下气隙磁通密度THD和转矩波动系数的变化趋势
Fig.4
Trend of THD of air gap magnetic density and torque ripple coefficient under different eccentricities
图5
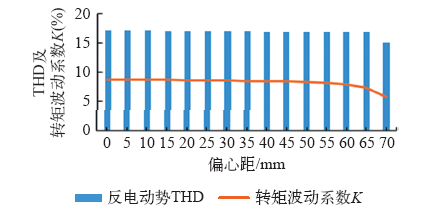
图5
不同偏心距下反电动势THD和转矩波动系数的变化趋势
Fig.5
Trend of THD of back electromotive force and torque ripple coefficient under different eccentricities
3.1 齿冠偏心内凹对气隙磁通密度的影响
永磁电机气隙磁通密度由两大磁源提供,即永磁体励磁(开路磁场)和通电绕组励磁(电枢反应磁场)[10]。为获得气隙磁场分布,先假设定、转子表面光滑无槽,分别计算永磁体励磁磁场和通电绕组励磁磁场,再考虑定/转子开槽的影响,计算气隙相对磁导,最后通过线性叠加获得合成气隙磁通密度,即
图6
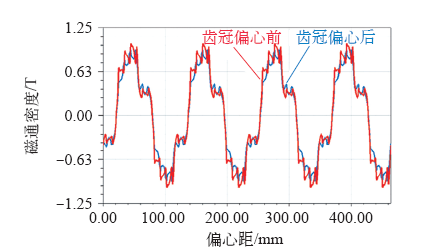
图6
齿冠偏心前后气隙磁通密度波形对比(线形图)
Fig.6
Comparison of air gap magnetic density waveform of before and after eccentricity of stator teeth (line figure)
图7
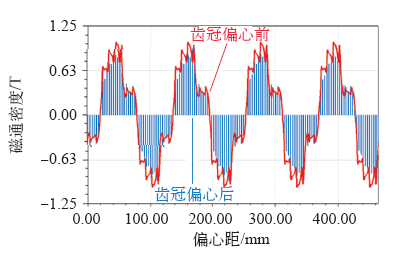
图7
齿冠偏心前后气隙磁通密度波形对比(区域图)
Fig.7
Comparison of air gap magnetic density waveform of before and after eccentricity of stator teeth (area figure)
3.2 齿冠偏心内凹对反电动势的影响
电枢绕组通入三相对称电流产生电枢磁场,并与主磁极磁场相互作用,在电枢绕组上感应反电动势。电机气隙磁场分布非正弦,气隙磁场中含有谐波,较大的谐波含量会造成电机反电动势谐波含量也较大,从而导致反电动势非正弦。因此,气隙磁通密度的正弦性会影响反电动势的正弦性。绘制偏心距H = 70mm时的偏心前后反电动势波形(A相)对比图,如图8所示。
从图8可以看出,偏心后的反电动势波形的波峰、波谷明显减小,反电动势波形得到改善。
图8
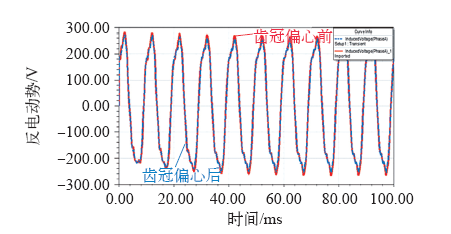
图8
齿冠偏心前后反电动势波形对比(A相)
Fig.8
Comparison of back electromotive force waveform of before and after eccentricity of stator teeth (A phase)
3.3 齿冠偏心内凹对转矩波动的影响
当表贴式永磁同步电机用正弦波驱动时,电机的反电动势往往是非理想的正弦波,且含有一定的较低次谐波成分,由于反电动势乘以驱动电流为电磁功率,非理想的正弦波反电动势会导致电磁功率不恒定,从而导致输出转矩波动。
图9
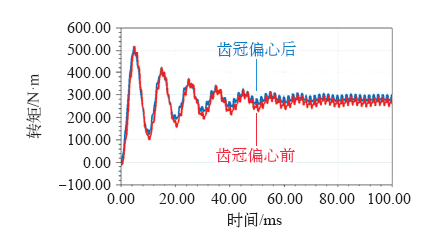
图9
齿冠偏心前后输出转矩对比
Fig.9
Comparison of the output torque of before and after eccentricity of stator teeth
从图9可以看出,起动转矩得到了提高,同时转矩波动明显下降,比优化前降低了3.13%。
3.4 齿冠偏心内凹对齿槽转矩的影响
图10
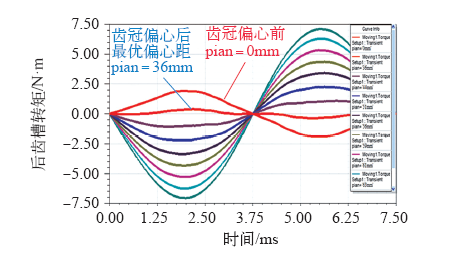
图10
齿冠偏心前后齿槽转矩对比
Fig.10
Comparison of the cogging torque of before and after eccentricity of stator teeth
由图10可知,以0.12mm的间距逐步增大内凹程度,齿冠偏心距分别为0mm、36mm、44mm、51mm、56mm、59mm、61mm、63mm和70mm。齿冠偏心前的齿槽转矩峰值为1.92N·m,当齿冠内凹程度X = 0.12mm时,即齿冠偏心距H = 36mm(由式(2)计算得出)。此时偏心后的齿槽转矩峰值为0.36N·m,比偏心前降低了81.25%。
由仿真数据分析可知,齿冠偏心过小,气隙磁通密度THD、反电动势THD、转矩波动系数变化不大,达不到抑制转矩波动的效果;而齿冠偏心过大,会引起气隙长度变大,增加磁阻,影响电机效率。同时齿槽转矩也是影响转矩波动的主要因素,综合考量,对于本文的工业机器人用36槽8极永磁同步电动机,当偏心距为36mm时,内凹程度为0.12mm,偏心距处于中间位置,此时齿槽转矩为最小值。采用此最优偏心距的齿冠偏心内凹结构,可以有效改善气隙磁通密度波形,同时抑制转矩波动。
综合以上内容可知,采用定子齿冠偏心内凹结构,能够增加定子铁心与转子之间的气隙长度,进而增加电机运行时的有效气隙长度,通过气隙不均匀来改善磁场波形,可以有效降低气隙磁通密度THD,同时对转矩波动起到抑制作用。
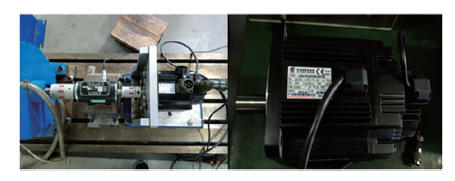
4 样机测试
表2 齿槽转矩试验数据
Tab.2
| 电机编号 | 130SJTR-MZ096C(A4Y3X) |
|---|---|
| 齿槽转矩/N·m | 0.34 |
| 齿槽转矩波动率(%) | 0.42 |
图12
图11
5 结束语
为了抑制工业机器人用永磁同步电机的转矩波动,本文提出了定子齿冠偏心内凹结构,并对电机的转矩波动理论进行了分析研究。通过有限元分析软件ANSYS Maxwell对采用该结构的36槽8极PMSM进行仿真分析,验证了气隙磁通密度的正弦性影响了反电动势的正弦性,反电动势的正弦性会影响输出转矩的波动,并给出了最优偏心距及内凹程度。仿真分析与样机测试结果表明,基于本结构的设计方法选择合适的偏心距可以改善气隙磁场波形,降低气隙磁通密度THD、反电动势THD和齿槽转矩,通过优化气隙磁通密度和齿槽转矩,可以有效地抑制输出转矩波动。
参考文献
我国工业机器人技术现状与产业化发展战略
[J].
Current status and industrialization development strategy of industrial robot technology in China
[J].
转子静态偏心对电动汽车永磁同步电机转矩波动的影响
[J].
Effect of static eccentricity of rotor on torque fluctuation of permanent magnet synchronous motor of electric vehicle
[J].
负载对分数槽永磁电机转矩波动的影响
[J].
Effect of load on torque ripple of fractional slot permanent magnet motor
[J].
永磁交流伺服电动机转矩波动分析
[J].
Analysis of torque fluctuation of permanent magnet AC servo motor
[J].
一种改进的永磁同步电机直接转矩控制方法
[J].
An improved direct torque control method for permanent magnet synchronous motor
[J].
Analysis of torque ripple of permanent magnet AC servo motor based on ansoft
[J].
不均匀气隙结构的异步起动永磁同步电机设计
[J].
Design of asynchronous starting permanent magnet synchronous motor with uneven air gap structure
[J].
压缩机负载下永磁同步电机损耗分析及优化设计
[D].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}