

1 引言
基于反电势的方法则主要应用于中高速场合[11⇓-13]。滑模观测器的方法由于其结构简单、鲁棒性强等优点被广泛应用于电机的无位置控制中[14-15]。然而,滑模观测器中由于符号函数产生的高频抖振现象比较严重,需要采用低通滤波器获得系统的位置信息,这样既增加了运算量,也降低了系统的动态响应能力,同时其造成的相位延迟,也需要进行实时补偿[16⇓-18]。文献[16]提出了一种自适应的滤波器来获取反电势,可以实现更小的相位延迟及更强的动态响应能力。文献[19]使用反正切函数取代开关函数,降低了系统的抖振现象,提高了系统的位置观测精度。除此之外,高阶滑模算法可以将开关函数放入积分项中,无需低通滤波器即可获得反电势的信息,文献[20]采用超螺旋算法对反电势进行观测,并且通过设计可变的滑模增益,使其可以在更大的速度运行范围内使用,然而,超螺旋算法的固定增益在误差较大的观测初始阶段,性能反而不如单纯的线性观测器。文献[21]指出,在速度比较低的时候,电阻、电感误差会对反电势的观测产生一定的影响,进而造成相位延迟。
为了解决上述问题,本文提出一种基于改进自适应超螺旋观测器(Adaptive super twisting observer,ASTO)的无位置控制方法,其能够减小系统抖振现象、提高收敛速度以及自适应地进行电气参数辨识。该方法在超螺旋算法中引入高幂次项,以提高观测器存在一定初始误差时的观测性能,此外通过自适应控制率对电阻参数进行实时辨识,可以有效减少参数误差带来的相位误差。最后,本文通过STM32的试验平台,对比所提算法与传统滑模观测器以及变增益的超螺旋观测器的性能,验证了所提算法的有效性。
2 PMSM数学模型建立
为了简化PMSM的数学模型,假设气隙磁场呈正弦分布,忽略涡流和磁滞损耗,d-q轴电感相同,在α-β轴系下建立电机的数学方程
式中,uα、uβ分别为α、β轴电压;iα、iβ分别为α、β轴电流;Rs为定子电阻;Ls为定子电感,eα、eβ分别为α、β轴反电势,且表示为
式中,ωe为电角速度;θe为电机的电角度,φf为永磁体磁链幅值。
3 自适应超螺旋观测器设计
3.1 传统超螺旋观测器设计
超螺旋观测器采用超螺旋算法进行设计,该算法是由一对微分器构成的系统,通过对状态变量进行连续的微分并使用一个稳定的非线性反馈,使得系统能够在快速、平滑的方式下完成跟踪和稳定控制。此外,该算法具有高精度、鲁棒性好等优点,能够解决传统滑模控制中无法避免的抖振问题,由于该算法不受系统的模型误差和外部干扰的影响,因此具有良好的鲁棒性和适应性,并能够应用于复杂的非线性系统中。对于式(1)可以构建如下观测器
式中,上标^表示该物理量的估计值,
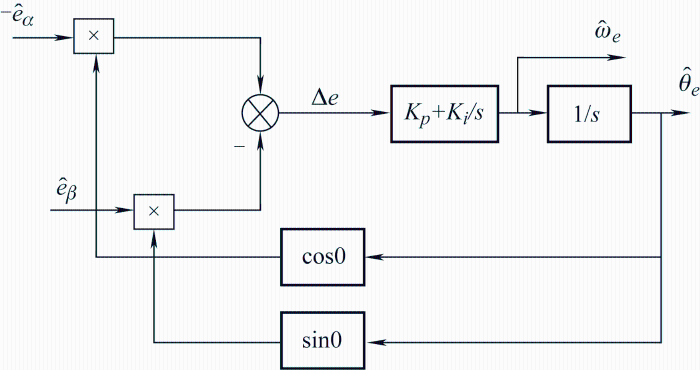
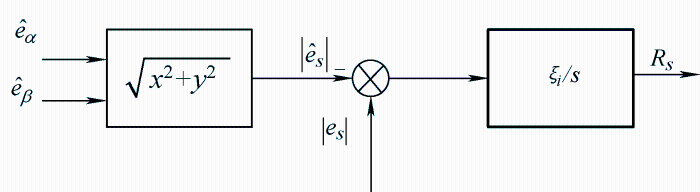
当反电势估计值趋于实际值后,可以通过反正切或锁相环的方式得出电机的旋转速度以及角度。锁相环结构如图1所示,通过线性化并选取合适的比例积分(Proportional integral,PI)参数(
式中,
图1
3.2 参数误差造成的误差分析
考虑电阻以及电感的误差之后,则当电流估计误差为零时,反电势的估计值根据等效控制原理可以得到
式中,
图2
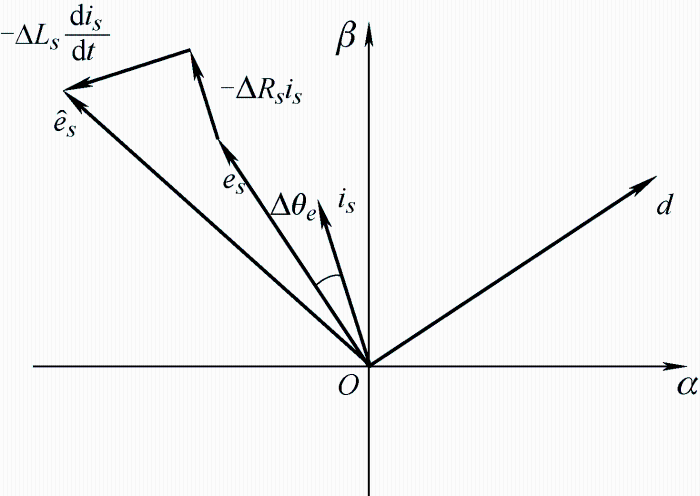
表1 PMSM及相关参数
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 定子电阻Rs/Ω | 0.9 | 控制周期Ts/μs | 100 |
| 定子电感Ls/mH | 0.65 | 死区时间Td/μs | 2 |
| 永磁体磁链φf/Wb | 0.003 | 母线控制电压Udc/V | 50 |
| 电机极对数 | 5 | 开关频率fs/kHz | 10 |
可以看出此时电阻误差造成的影响更大,而只有当电机运行速度较高时,
此外,图2中es与q轴重合,所以,当电机控制策略采用id=0时,可以看出定子电阻的误差只会使估计反电势的相位不变或增加
3.3 改进的自适应超螺旋观测器设计
虽然超螺旋观测器相较于线性扩展状态观测器(Extended state observer,ESO)具有更强的鲁棒性,但是在误差较大的情况下,前者对于误差的增益会远小于后者,因此此时的收敛速度反而不如ESO。为了改善观测器在跟踪初期的收敛速度,本文在观测器中加入高幂项的同时保持其稳定性,并通过自适应算法对模型参数进行估计,提高位置观测精度。考虑矢量的分解理论,单个矢量最多可以分解为确定的两个方向的矢量,所以在未注入其他频率信号的前提下,本文除了反电势外,选择在低速时对估计误差影响更大的Rs进行辨识,其结构框图如图3所示,并可以表示为
式中,λ1、λ2、k1、k2为大于零的系数,
图3
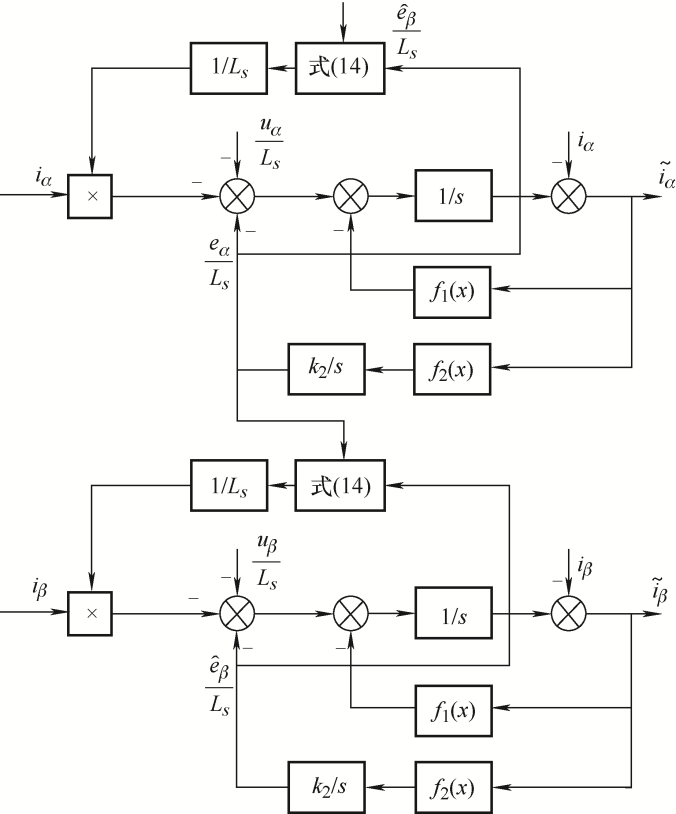
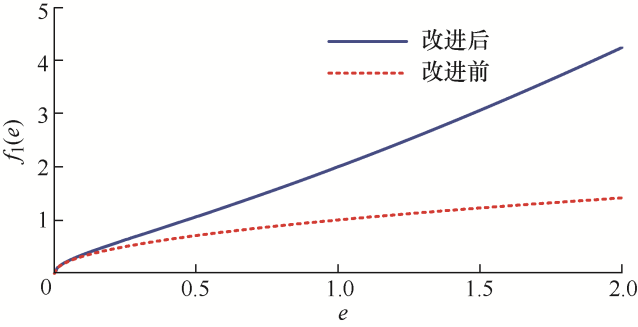
图4为改进后的控制率与原始控制率关于e的关系图,其中λ1=λ2=1。可以看到,改进后的控制率在误差较小时与改进前基本重合,而当误差增大后,改进后的控制率则是远远大于原方案的。
图4
令Δθe为反电势超前定子电流的角度,对于定子电阻Rs的估计,需要做如下假设。
① 电阻误差造成的影响不足以使电机反转,即es-ΔRsiscos(Δθe)>0。
② 定子电流和反电势的相位差小于π/4,即-π/4≤Δθe≤π/4。
对于假设②,电机在低速时通常运行于最大转矩电流比(Maximum torque per amp,MTPA)曲线上,根据式(11)[23]容易得到
式中,
考虑只有电阻误差的情况,可以得到
当ΔRs<0时,可以对式(8)进行放缩
而当ΔRs≥0时,可以得到
由上面的分析可知
式中,k(t)为时变的正系数。
式中,ζi为积分增益。图5为自适应律估计Rs的结构框图。
图5
对于本文所添加的高幂项,利用定时器测量单次电流环执行时间可得,使用传统超螺旋观测器的运行时间为42 μs,而使用改进自适应超螺旋观测器的运行时间为48 μs,仅比原方案多了6 μs,在载频不高的情况下是可接受的。
3.4 稳定性证明
在电机运行过程中,电阻会随着温度的变化而产生一定的变化,但是其变化率相较于观测器带宽而言是相当低的[21],可以将其导数视为0。
考虑关于Rs的李雅普诺夫函数为
其导数可以表示为
将式(13)代入式(18)可以得到
故所提自适应律可以使定子电阻估计值稳定地收敛于真实值。
考虑关于误差的系统方程,使用式(9)减去式(1),可以得到
式中,
注意到
选择以下李雅普诺夫函数
式中,P=[αij]2×2为对称正定矩阵,可以得到Lα是正定的,对其求导可以得到
式中,Q为对称正定矩阵。不妨设
式中,||·||2为向量的二范数。因此,可以得到
式中,σ1和σ2为正的系数。对式(26)进行放缩可以得到
若式(27)中的二次型矩阵为负定,可以得到
故选择合适的系数λ1、λ2、k1、k2,即可使观测器跟踪上实际电流,进而观测出反电势。
对于β轴的观测器,考虑到
3.5 系统整体控制方案
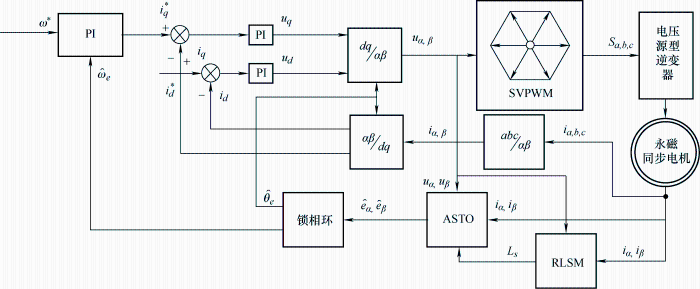
系统整体控制框图如图6所示。首先通过采集电机电流(ia,ib,ic)并使用Clark变换获取α-β轴系下的电流,接着通过该轴系下的电压指令使用本文所提的ASTO对反电势以及定子电阻进行估计,此外,根据静止轴系下的电压电流使用递推最小二乘法[24](Recursive least square method,RLSM)对电感值进行测量。接着,通过锁相环得到估计位置和估计转速。通过该估计位置使用Park变换计算得到dq轴系下的电流。此外,对于给定转速(ω*)与估计转速的误差使用PI控制器获取q轴电流给定(iq*),接着电流环根据给定电流与实际电流采用PI控制器输出dq轴电压指令(ud,uq)并转换为α-β轴系下的逆变器电压指令,实现电机控制。
图6
4 仿真及试验验证
4.1 仿真结果及分析
为了验证所提算法的有效性,本文选择传统的SMO算法[17]、变增益超螺旋观测器(Variable gain STO,VGSTO)[20]作为对比算法。电流环的控制周期为10 kHz,PI控制器参数为kp=0.6,ki=900。转速环的控制周期为2 kHz,PI控制器参数为kp=0.08,ki=0.1。传统SMO算法的滑模增益ksw=1.5,低通滤波器截止频率ωc为1 000 rad/s;VGSTO算法的参数为σ1=0.04,σ2=0.2;ASTO算法的参数为k1=19.02,k2=1,λ1=λ2=100(σ1=0.388,σ2=0.001),ζp=0.1,ζi=1。锁相环的参数为kp=2 000,ki=1 000。电机及相关参数如表1所示。
为了验证所提算法具有更快的收敛速度,本文选择给定速度为200 r/min,空载运行,且初始角度差为0.4 rad的情况作为试验及仿真条件。
图7
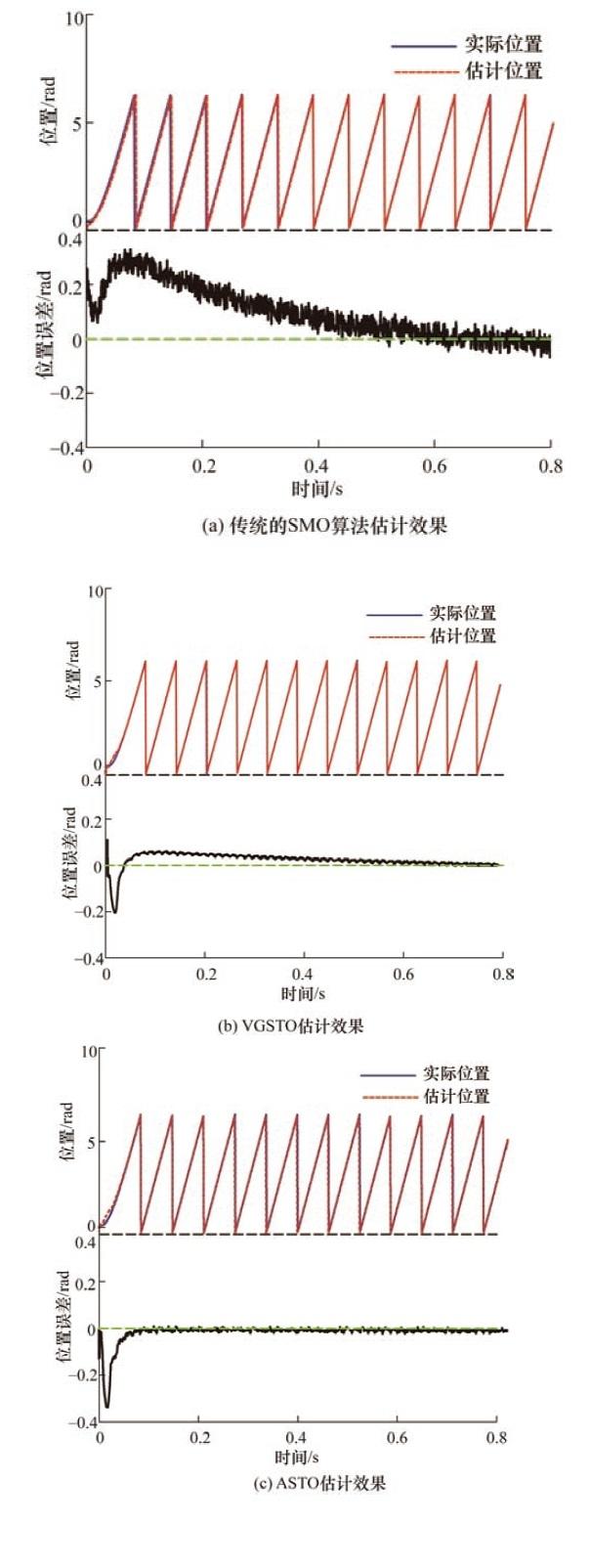
图8
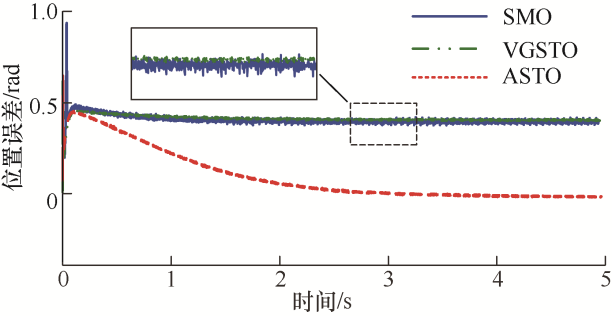
图9
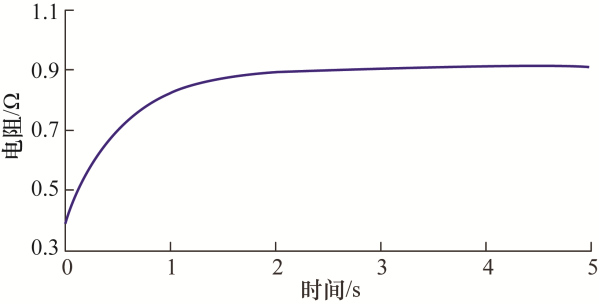
图10
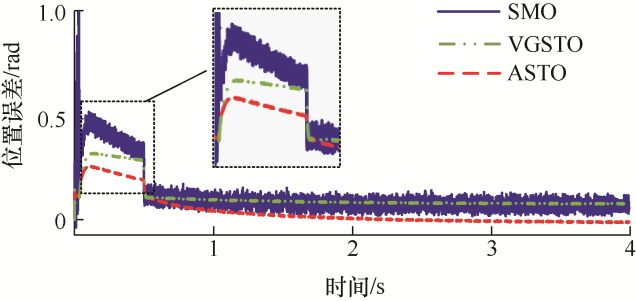
图11
4.2 试验结果及分析
为了验证改进自适应超螺旋观测器的正确性,基于STM32系统搭建如图12所示的试验平台。该试验平台包括基于STM32F407的驱动器、10 kW电源、永磁同步电机以及计算机。驱动器由六个分立的MOSFET组成,电机电流通过HCS-LTS3进行采样,通过模数转换模块输入STM32F407VET6并进行后续的计算。
图12
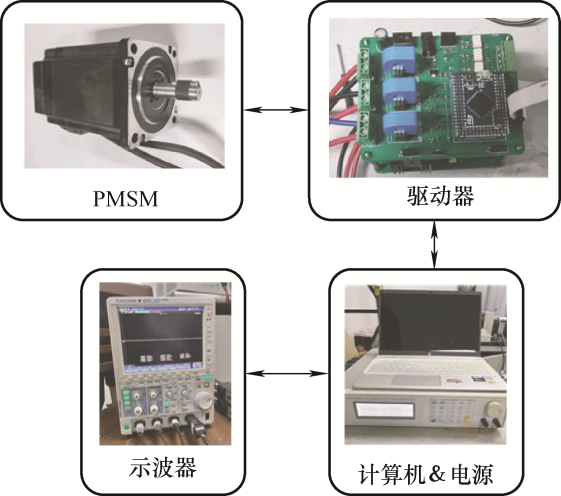
图13
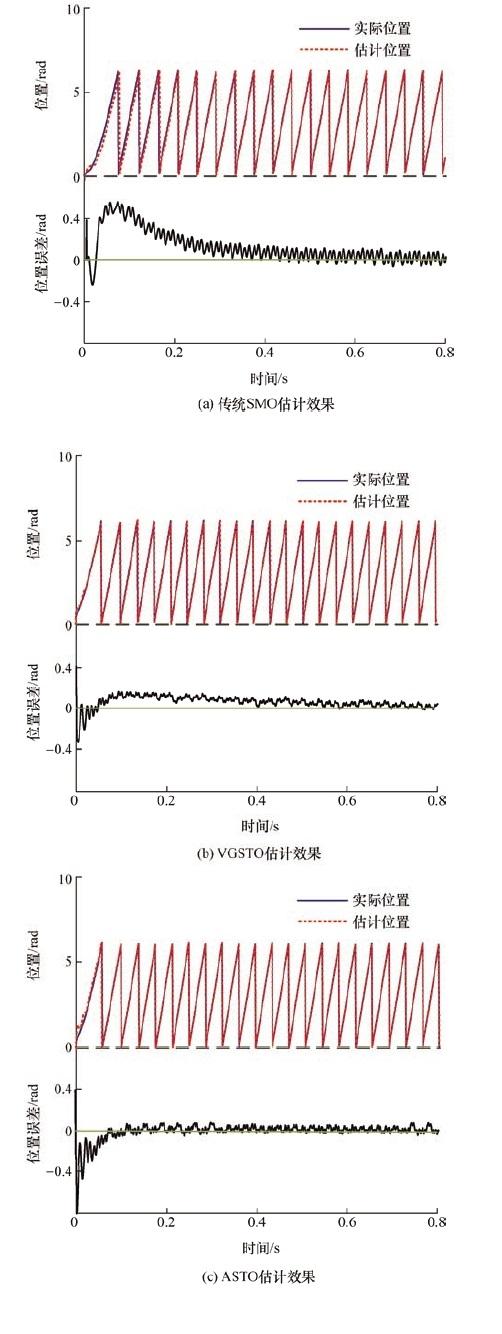
图14
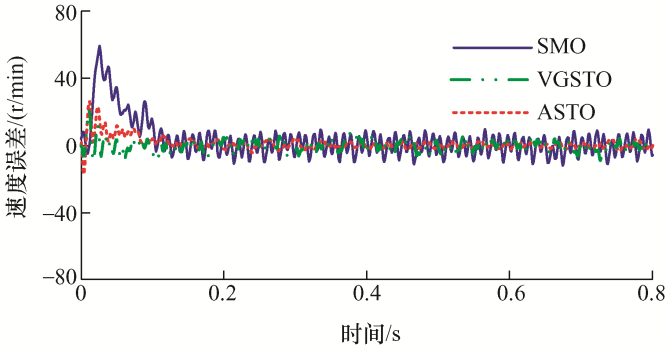
图15
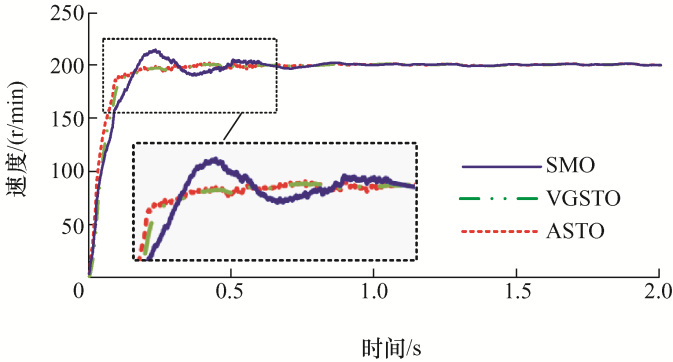
图16
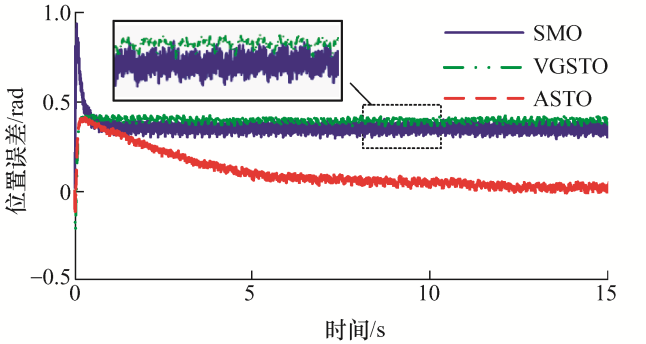
图17
图18
图19
图20
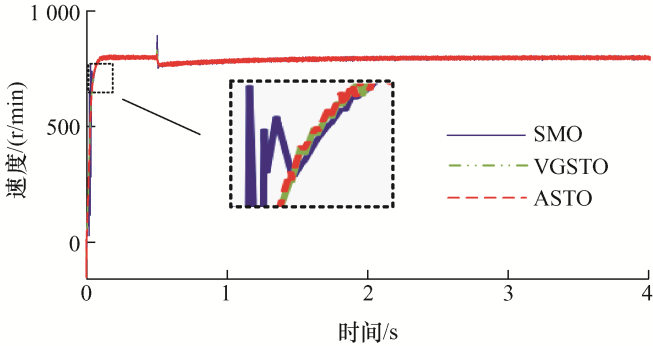
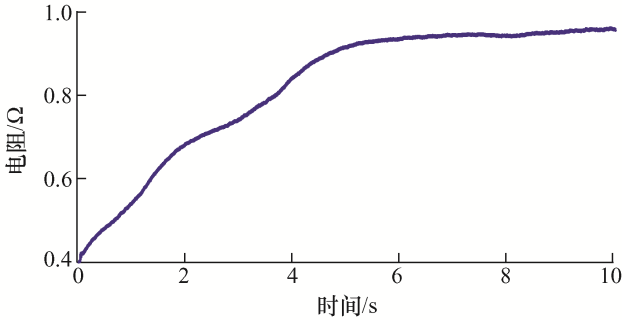
进一步地,为了验证算法在高速时同样具有良好的性能,本文设定给定转速为800 r/min,电阻初始值为0.6 Ω,d轴电流给定为1 A,进行了试验。图21、图22为其位置估计误差和转速跟踪曲线。SMO以及VGSTO在稳定后有0.15 rad的位置估计误差,而ASTO仍然可以随着电阻的估计不断减小位置估计误差。SMO的速度响应曲线有接近180 r/min的超调,并且响应时间在0.5 ms左右,而VGSTO与ASTO的超调均在30 r/min左右,响应时间也只有0.2 ms。图23为其电阻估计曲线,可以看到,速度增大后,电阻估计误差也相应增大到了0.6 Ω,但是误差也可以保持在6%以内,这在高速时对于位置估计的影响已经可以忽略不计。
图21
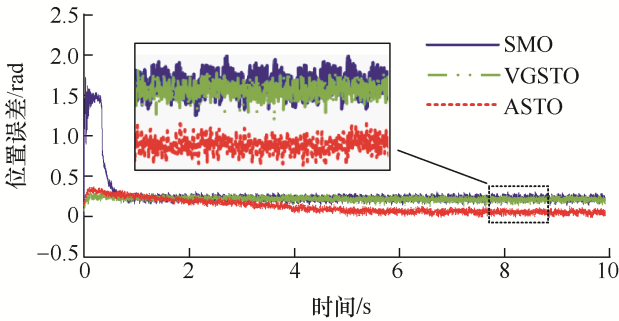
图22
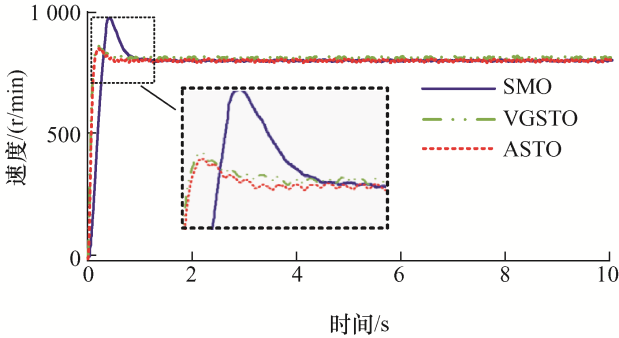
图23
5 结论
为了提高永磁同步电机在低速时的位置估计精度,本文提出了一种改进的自适应超螺旋观测器用于永磁同步电机反电势的估计。通过在低速、中高速,以及有无电阻、电感误差的情况下进行了试验及仿真验证,可以得到如下结论。
(1) 该观测器将传统的超螺旋观测器中加入了新的高幂次非线性项,能够有效提高其在误差较大情况下的收敛速度。
(2) 设计的用于电阻估计的自适应律,可以在电阻误差较大的情况下大大降低电阻误差对角度估计的影响。
(3) 改进观测器较传统方案具有更小的抖振现象、更快的收敛速度以及在电阻存在误差时具有更准确的位置估计性能。
参考文献
A harmonic injection method equivalent to the resonant controller for speed ripple reduction of PMSM
[J].DOI:10.1109/TIE.2021.3125651 URL [本文引用: 1]
A modified deadbeat predictive current control for improving dynamic performance of PMSM
[J].DOI:10.1109/TPEL.2022.3188761 URL [本文引用: 1]
Experimental low-speed performance evaluation and comparison of sensorless passive algorithms for SPMSM
[J].DOI:10.1109/TEC.2021.3101583 URL [本文引用: 1]
HF pulsating carrier voltage injection method based on improved position error signal extraction strategy for PMSM position sensorless control
[J].DOI:10.1109/TPEL.2021.3055534 URL [本文引用: 1]
永磁同步电机无位置传感器控制技术研究综述
[J].
Position-sensorless control technology of permanent-magnet synchronous motor:A review
[J].
基于滑动平均滤波的永磁电机无位置传感器控制策略
[J].
Sensorless control strategy of permanent magnet motor based on moving average filtering
[J].
基于脉振高频电流注入SPMSM低速无位置传感器控制
[J].
Sensorless control of SPMSM based on high frequency current signal injection in the direct axis at low and zero speed
[J].
基于旋转综合矢量脉振高频电压注入的永磁磁通切换电机无位置传感器技术
[J].
A rotating sythesis vector based high frequency pulse voltage injection method for the sensorless control of the flux-switching permanent magnet machine
[J].
高频信号注入永磁电机系统转子位置估计偏差在线补偿方法
[J].
Online compensation method of estimated rotor position offset error for high-frequency signal injection based PMSM drives
[J].
基于交轴磁链辨识的永磁同步电机位置传感器零位校正方法
[J].
A q-axis flux linkage identification based zero-correction for position sensor of permanent magnet synchronous motor
[J].
Sensorless low speed PMSM motor control with cogging torque compensation
[C]//
A third-order super-twisting extended state observer for dynamic performance enhancement of sensorless IPMSM drives
[J].DOI:10.1109/TIE.41 URL [本文引用: 1]
基于ESO-PLL的永磁同步电机无位置传感器控制
[J].
Sensorless control for permanent magnet synchronous motor based on ESO-PLL
[J].
Unified graphical model of high-frequency signal injection methods for PMSM sensorless control
[J].DOI:10.1109/TIE.41 URL [本文引用: 1]
Modeling and detection of dynamic position sensor offset error in PMSM drives
[J].DOI:10.1109/ACCESS.2023.3265326 URL [本文引用: 1]
Adaptive PLL-based sensorless control for improved dynamics of high-speed PMSM
[J].DOI:10.1109/TPEL.2022.3169708 URL [本文引用: 2]
Sensorless predictive control of SPMSM-driven light EV drive using modified speed adaptive super twisting sliding mode observer with MAF-PLL
[J].DOI:10.1109/JESTIE.8847244 URL [本文引用: 2]
基于MRAS的双三相永磁同步电机无位置传感器控制研究
[J].
Position sensorless control of dual three phase permanent magnet synchronous motor based on MRAS
[J].
基于改进型滑模观测器的飞轮储能系统控制方法
[J].
Research on FESS control based on the improved sliding-mode observer
[J].
永磁同步电机改进滑模无位置传感器控制
[J].
Improved sliding mode sensorless control of permanent magnet synchronous motor
[J].
An adaptive interconnected observer for sensorless control of PM synchronous motors with online parameter identification
[J].DOI:10.1109/TIE.2012.2206355 URL [本文引用: 2]
Implementation of super-twisting control:Super-twisting and higher order sliding-mode observer-based approaches
[J].DOI:10.1109/TIE.2016.2523913 URL [本文引用: 1]
内置式永磁同步电动机MTPA控制策略研究
[J].
Research on MTPA control strategy of interior permanent magnet synchronous motor
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}