

1 引言
随着互联电网向智能化、自动化发展,可靠、有效的新型并网方式的研究至关重要[1]。有学者提出基于背靠背VSC-HVDC的并网复合装置,通过在待并列两侧系统间传递有功和无功功率,调节待并列两侧的频率和电压,实现电网间的同期并列,该方法改变了传统同期并列方法完全依靠人工操作、操作涉及面广且难度较大、并网速度慢、成功率低的现状[2⇓-4]。文献[5]研究了并网复合系统的解列和并网功能的综合控制策略,提高了电网自动化程度。文献[6]提出了一种并网系统转换为UPFC的方法,并分析了转化过程中对并网系统的影响。针对并网装置转换为UPFC的过程中出现功率和电压长时间波动问题,文献[7]提出了一种基于功率传递方式实现电网并网与UPFC功能相结合的控制策略。文献[8]通过建立并网装置转换为静止同步串联补偿器后复合系统的等效模型,验证了不同故障情况下静止同步串联补偿器的限流能力。文献[9]研究了低惯量电力系统中并网复合装置控制稳定性的问题,为低惯量电力系统平滑并网提供了新的思路。文献[10]为抑制背靠背MMC-HVDC并网复合系统功率传递过程中的联络线波动,将阻抗分析法与现有控制策略结合,以提高并网稳定性。上述文献提出了基于背靠背MMC-HVDC并网复合装置的概念,对并网复合装置的控制策略做了一定的研究,但未考虑控制器参数手动调节参数的复杂性和不确定性问题。
为了保证优化效果,本文利用全局搜索与局部搜索兼顾的飞蛾扑火优化算法(Moth-flame optimization,MFO)进行基于背靠背MMC-HVDC并网复合装置的滑模变控制器参数优化。文献[14]提出飞蛾扑火优化算法,并在29个基准和7个实际工程问题上与其他著名的自然启发算法进行了比较,验证其优越性。文献[15]针对风力发电机组PI控制参数整定难的问题,利用飞蛾扑火优化算法对控制器参数进行优化,试验证明参数优化后的PI控制器控制效果得到明显改善。文献[16]提出基于飞蛾扑火优化算法的多运行方式PSS参数协调优化方法,仿真算例结果表明,应用该方法后有效提高了系统的动态稳定性。文献[17]针对电力系统最优潮流问题,提出采用MFO算法的最优化求解方案,算例结果表明,采用MFO算法求解最优潮流问题具有收敛速度更快、搜索精度更高、鲁棒性强等优点。根据上述研究成果,传统MFO算法存在着两大问题:一是算法后期收敛速度慢。考虑到传统MFO算法的螺旋式飞行搜索和位置更新机制虽对全局搜索能力和局部搜索能力有一定的平衡作用,在优化前期,该算法可快速接近相对最优解,但是在经过一定迭代次数之后,螺旋式飞行搜索会将飞蛾局限在某较小的区域中,该搜索方式仅会对当前位置做一些较小的更新,导致算法后期的收敛速度变慢。二是早熟收敛。MFO不具备跳出局部最优的机制,一旦陷入局部最优,就难以跳出,导致发生早熟收敛现象。同时MFO算法的火焰自适应熄灭机制虽增强了局部寻优能力,但在一定程度上减少了种群多样性,也会导致早熟收敛现象。
针对MFO算法的不足,本文将佳点集初始化和Lévy飞行机制与飞蛾扑火优化算法结合,在加快收敛速度的同时提高算法的全局寻优能力,即使算法暂时陷入局部最优,也可通过Lévy飞行跳出,并以Automation Library为纽带,实现Python-PSCAD联合仿真,验证所提方法能够有效改善并网复合装置滑模变控制器的控制性能。
2 并网复合装置滑模变控制器设计
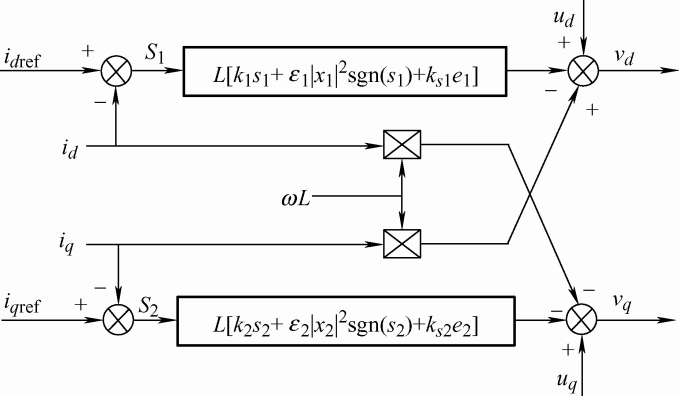
2.1 电流内环滑模变结构控制器设计
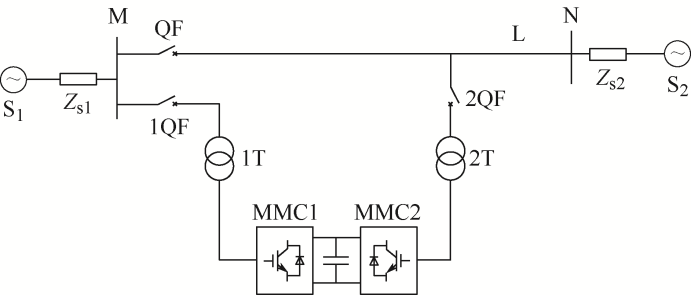
图1
MMC在dq坐标轴下的动态方程为
式中,
滑模面和趋近律的选择作为滑模变控制器设计的重中之重,其选取直接影响到滑模变控制器的控制性能。考虑到积分可消除系统的静态误差,因此本文选取积分滑模面,如式(3)所示
式中,
当系统处于稳态时,系统状态是运行在滑模面上的。但系统在进入稳态前,必须施加一控制作用使系统向滑模面趋近。
选取指数趋近律,如式(4)所示
式中,
指数趋近律中同时包含指数趋近项和等速趋近项,这样使得系统能很快地趋近切换面。
将
式中,
控制之初
由式(1)可知,MMC变换器交流侧电流
图2
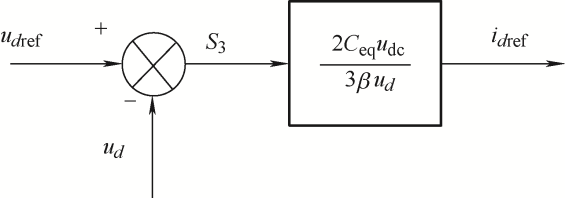
2.2 电压外环滑模变结构控制器设计
MMC每个桥臂是由多个子模块级联组成,其直流侧电容电压是由子模块电容电压支撑,由能量守恒定律可得
式中,
直流侧直流电压指令值
考虑到电压外环控制器的控制目标是维持直流侧电压的稳定,因此该控制器的设计要求是保证直流侧电压的控制具有较强的抗干扰能力,微分作用能够消除扰动对系统的影响,能够较好地消除抖振。因此选取一阶滑模为
式中,
令
由式(12)便可得到内环控制器的参考有功电流idref。电压外环滑模变结构控制框图如图3所示。
图3
当系统的状态轨迹到达滑模面后,因为实际切换装置会存在延时现象,很难完全沿着预设的滑模面向平衡点滑动,而是遵循着在切换面的两侧反复切换的原则运动,这便是系统的抖振现象。抖振在影响系统控制精度的同时还会影响器件的使用寿命,但抖振是滑模变控制中固有的,无法将其彻底消除,只能尽可能削弱[20]。抖振的大小受滑模变控制器参数直接影响,因此找寻滑模变控制器的最优参数,可有效提高系统控制性能。
3 改进的飞蛾扑火优化算法
3.1 算法原理
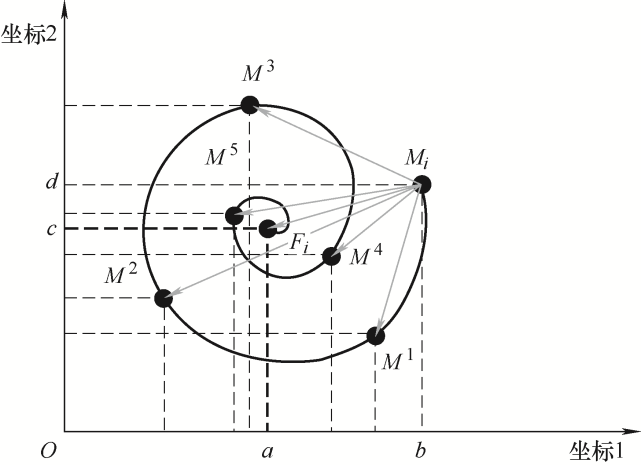
该算法衍生于以螺旋趋近的方式趋近光源的飞蛾扑火现象,飞蛾是不断搜索找寻最优值的个体,而火焰则是飞蛾寻优过程中获得的最优位置。每个飞蛾在相对应的火焰周围寻优,并在找到更好解的情况下更新火焰位置,从而保证寻优过程中最优解的保留[21]。
MFO算法可表示为三元组寻优问题
式中,
P函数可以表示为
式中,S是螺旋函数;Mi表示第
式中,
式中,
图4
若每次迭代都有n只飞蛾,则飞蛾会侧重于全局寻优而影响局部寻优的精度,并且排序在最后的火焰寻优价值也较低。研究者提出火焰自熄灭机制,随着算法迭代次数的增加,逐渐抛弃适应度差的火焰,火焰熄灭式可以表示为
式中,
佳点的构造不受空间维数的影响,能够较好地解决高维空间求解问题。因此,应用佳点集初始化方法对飞蛾初始位置进行设置,能得到一个相对较好的初始飞蛾种群。佳点集初始化的具体表达式为
式中,
式中,
因此,Lévy飞行跳跃路径更新机制为
式中,
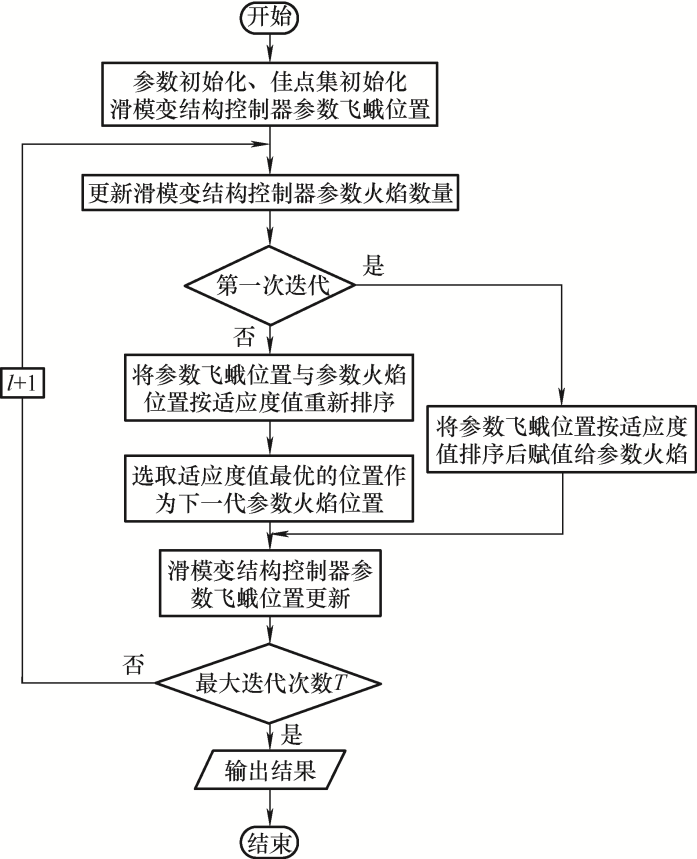
为了提高滑膜变结构控制器的性能,将电流内环滑模变结构控制参数和电压外环滑模变结构控制参数作为改进后的MFO算法寻优对象,并通过以下步骤实现控制器参数优化。
(1) 对参数进行初始化定义,并根据佳点集初始化方法,即式(18)生成滑模变结构控制器参数飞蛾初始位置。
(2) 使用式(17)更新滑模变结构控制器参数火焰数量。
(3) 判断是否为第一次迭代,若是则根据目标函数计算每个滑模变结构控制器参数飞蛾个体的适应度值,按照适应度值对滑模变结构控制器参数飞蛾排序,把滑模变结构控制器参数飞蛾的适应度值赋给对应的滑模变结构控制器参数火焰,得到第一代滑模变结构控制器参数火焰的位置;若不是第一次迭代,将滑模变结构控制器参数飞蛾位置与滑模变结构控制器参数火焰位置按照适应度值排序,将适应度值最优的位置赋给滑模变结构控制器参数火焰,成为下一代滑模变结构控制器参数火焰的位置。
(4) 将Lévy飞行与自适应惯性权重加入滑模变结构控制器参数飞蛾更新位置机制。
(5) 判断是否满足迭代停止条件,若未满足则返回步骤(2),若满足则执行步骤(6)。
(6) 输出寻优后的数值,即为控制器的最佳参数。
上述步骤即可实现基于改进飞蛾扑火优化算法的并网复合装置滑模变控制器参数优化,其流程如图5所示。
图5
3.2 算法测试
表2 测试结果
| 测试函数 | 算法 | 平均值 | 方差 |
|---|---|---|---|
| PSO | 2.642 245 | 0.144 362 | |
| MFO | 7.92×10-30 | 1.49×10-59 | |
| 改进MFO | 1.10×10-189 | 0 | |
| PSO | 1.098 57 | 0.028 251 | |
| MFO | 1.333 333 | 3.80×10-38 | |
| 改进MFO | 4.50×10-103 | 1.00×10-208 | |
| PSO | 19.212 38 | 88.857 96 | |
| MFO | 1.34×10-6 | 2.13×10-14 | |
| 改进MFO | 2.80×10-151 | 0 | |
| PSO | 0.907 91 | 0.150 335 | |
| MFO | 2.852 998 | 5.537 056 | |
| 改进MFO | 2.87×10-88 | 2.80×10-178 | |
| PSO | 70.704 18 | 0.876 751 | |
| MFO | 12.259 06 | 4.81×10-24 | |
| 改进MFO | 3.60×10-101 | 9.50×10-212 | |
| PSO | 26.165 55 | 110.614 7 | |
| MFO | 21.626 07 | 24.748 14 | |
| 改进MFO | 0 | 0 | |
| PSO | 1.565 486 | 0.038 066 | |
| MFO | 4.91×10-15 | 0 | |
| 改进MFO | 8.88×10-16 | 0 | |
| PSO | 0.829 78 | 0.009 495 | |
| MFO | 0.159 074 | 0.000 667 | |
| 改进MFO | 0 | 0 |
4 仿真验证
4.1 Python-PSCAD联合仿真
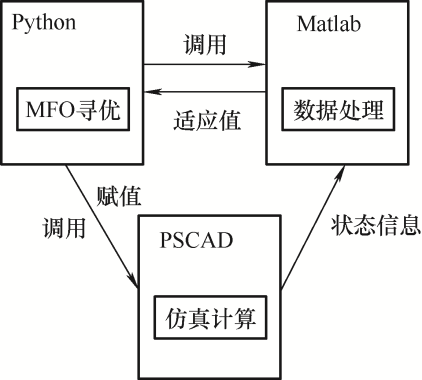
目前在PSCAD平台上搭建的控制器进行参数优化主要通过PSCAD与Matlabll接口实现,但PSCAD与Matlab互联时无法后台运行,利用Python-PSCAD联合仿真即可解决该问题。Automation Library是Python与PSCAD联合仿真的纽带,Automation Library由Python开发,支持PSCAD 4.6.1及以上版本,用于与PSCAD接口。此库接口允许用户从自定义脚本调用PSCAD函数,可通过Python语言对PSCAD实现启动PSCAD、加载工作区、项目和库、运行模拟、更改工作区和项目设置、更改组件参数等功能。
利用Python进行飞蛾扑火算法寻优,在数据处理部分,利用Python调用Matlab引擎进行适应度计算,而计算所需的状态信息则由Python利用Automation Library与PSCAD联合仿真获得,联合仿真结构图如图6所示。
图6
4.2 评估指标
采用综合ITAE指标作为衡量滑模变控制器控制性能好坏的标准,综合ITAE指标相比于ITAE指标增加了对调节时间和超调量的指标,避免优化算法过度重视ITAE指标而忽略调节时间和超调量等重要指标的问题,修改后的综合ITAE指标描述为
式中,tc为控制器调节时间;
考虑并网复合装置在功率传递过程中的动态特性,故设置目标函数为
式中,
4.3 仿真验证模型
在PSCAD/EMTDC仿真软件中搭建41电平的背靠背MMC-HVDC并网复合装置的仿真模型,用以验证和分析飞蛾扑火算法在滑模变控制参数优化过程中的有效性。两侧待并列系统设为水轮机模型,机组额定容量为120 MV·A,发电机出口电压13.8 kV,变压器变比13.8/230 kV;两侧系统的负荷分别为S1=70+j62 MV·A,S2=10+j20 MV·A。试验的详细仿真参数如表3所示。
本文以有功功率、无功功率和直流侧电压的综合ITAE值组成目标函数作为评价指标,着重对MMC1与MMC2的电流内环滑模变控制参数、MMC2的电压外环滑模变控制参数进行优化,其余参数设为定值。
将本文所述的改进飞蛾扑火算法应用于并网复合装置控制参数优化。在1台8 G内存,2.4 GHz主频的计算机上实现Python与PSCAD之间的联合运行。算法种群数量设置为30,最大迭代次数设置为100。
用传统MFO和所提改进MFO算法对并网复合装置的滑模变控制器参数进行优化,并与优化前的控制性能进行对比,表4展示了优化前后的评价指标。
通过表4的综合ITAE指标可看出,MFO算法及改进MFO算法均可对控制参数进行优化,使控制性能提高,而且本文提出的基于改进飞蛾扑火优化算法的并网复合装置滑模变控制参数优化方法的优化程度明显高于传统MFO算法。
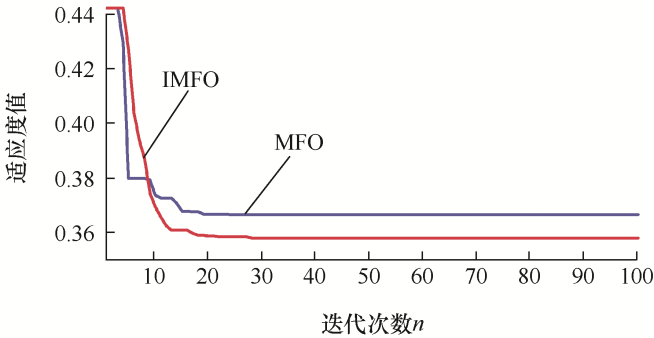
图7为控制器参数优化迭代过程中的收敛曲线,可看出在寻优初期,MFO的寻优速度暂时领先于IMFO。迭代10次之后,在达到相同的寻优精度时,IMFO的收敛速度明显快于MFO,且IMFO的寻优精度也高于MFO。综上所述,在背靠背MMC-HVDC并网复合系统的滑模变结构控制器参数优化过程中,IMFO较MFO的优化效果更突出。
图7
仅用综合ITAE指标验证控制效果较为片面,本节以直流侧电压和MMC1侧的有功功率、无功功率以及MMC2侧的无功功率的波形图来对比优化前后的参数控制效果。
图8
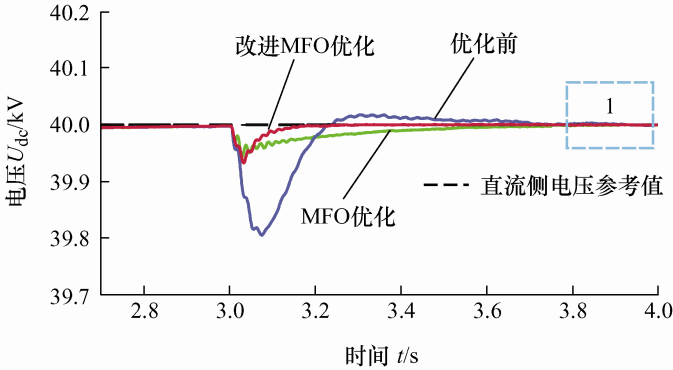
图9
此外,优化前后直流侧电压波动及响应速度情况如表5所示。
由表5可以看出,未经参数优化的直流侧电压需要0.7 s才能回归稳态,经MFO算法寻优后的直流侧电压需要0.6 s回归稳态,经改进MFO算法寻优后的直流侧电压的响应速度最低,仅需要0.2 s即可回归稳态。上述数据可有效说明控制器参数优化后的直流侧电压响应速度明显加快。
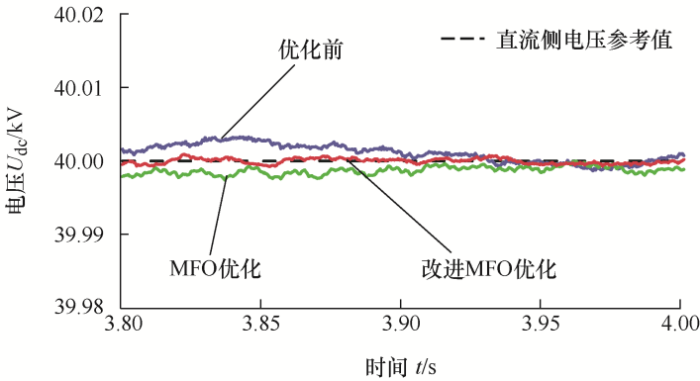
为进一步分析参数优化对系统稳态性能的影响,选取3.8~4 s之间的直流侧电压波形如图9所示,可见未经参数优化的直流侧电压和经MFO优化后的直流侧电压波形在稳态有一定的稳态误差,而经改进MFO优化后的电压波形具有良好的稳态性能,无明显稳态误差。综上所述,经MFO及改进MFO参数优化的系统直流侧电压较未经参数优化的系统直流侧电压具有更小的波动、更快的响应速度以及更小的稳态误差,且经改进MFO参数优化后的动、静态性能较MFO更佳。
图10
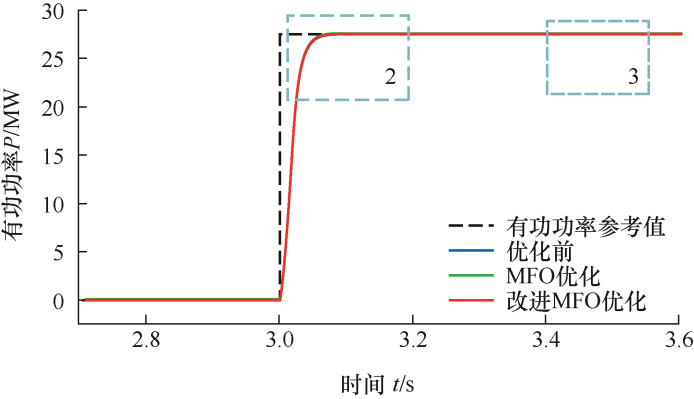
图11
图12
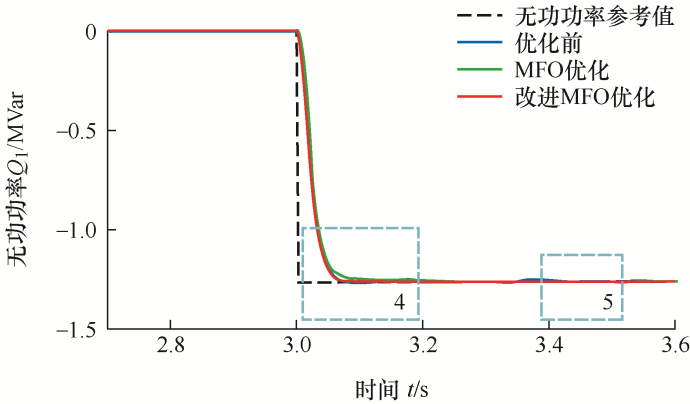
图13
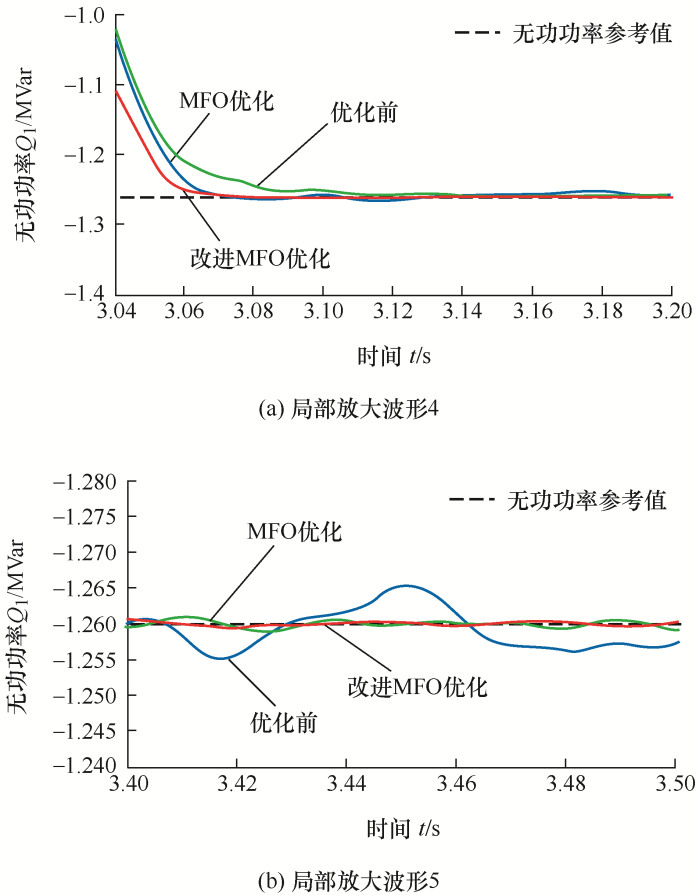
然而,从图13b来看,未经参数优化的无功功率静态性能较差,在无功功率已回归稳态后,仍存在幅值约为0.01 MVar的波动,而经MFO参数优化后的无功功率静态性能良好。经改进MFO参数优化后的响应速度为0.07 s。此外,经改进MFO参数优化后的无功功率静态性能较经MFO参数优化后的无功功率静态性能更优。
综上所述,经改进MFO参数优化后的系统无功功率较未经参数优化的系统无功功率具有更快的响应速度及更好的静态稳定性。
图14
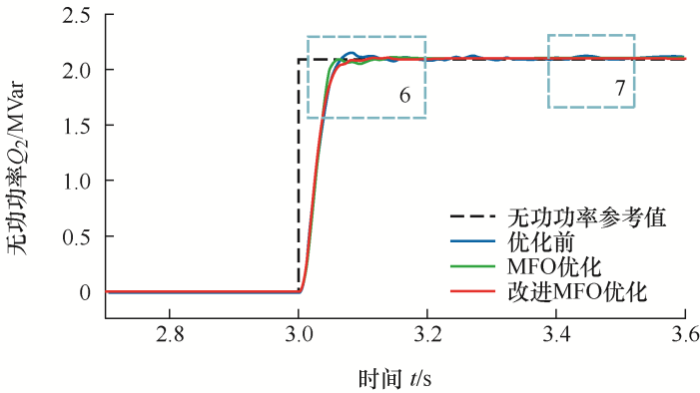
图15
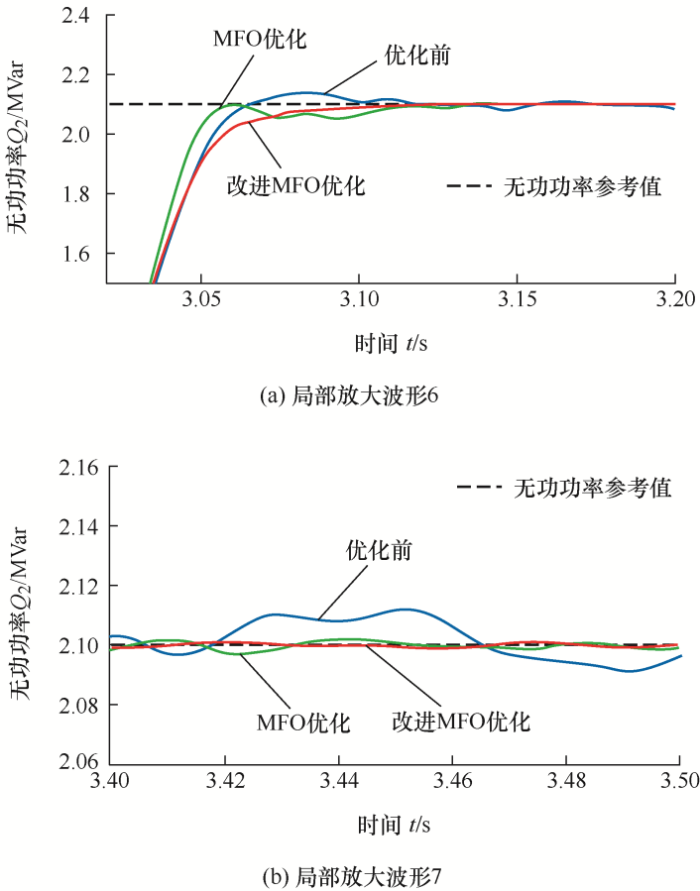
图14b可反映无功功率的静态特性,未经参数优化的无功功率静态性能较差,在无功功率已回归稳态后,仍存在幅值约为0.02 MVar的波动,而经参数优化后的无功功率静态性能良好,且根据波形看出经改进MFO参数优化后的无功功率静态性能较将经MFO参数优化后的无功功率静态性能更优。综上所述,经MFO及改进MFO参数优化的无功功率较未经参数优化的无功功率具有更小的超调、更快的响应速度,且经改进MFO参数优化后的动、静态性能较MFO更佳。
综合上述分析,对背靠背MMC-HVDC并网复合装置滑模变控制器进行参数优化可进一步抑制功率传递过程中直流侧电压的波动,同时提高系统的动、静态性能。根据对比可知,相对于传统MFO算法对并网复合装置直流侧电压波动的抑制以及系统动、静态性能的提高,改进MFO算法优化后的参数对并网复合装置直流侧电压波动的抑制以及系统动、静态性能的提高更具有优越性。
5 结论
为解决背靠背MMC-HVDC并网复合装置滑模变控制参数整定困难的问题,本文提出了一种改进飞蛾扑火优化算法,通过优化控制器参数以充分发挥控制器的性能。主要得出以下结论。
(1) 针对飞蛾扑火优化算法全局搜索能力差和容易早熟收敛的问题,本文将佳点集初始化种群和Lévy飞行更新机制与飞蛾扑火优化算法结合,其与原始飞蛾扑火算法相比,收敛速度得到了提升,并改善了算法陷入局部最优的问题。
(2) 针对Matlab-PSCAD联合仿真参数优化方法无法后台运行的问题,提出了基于Automation Library的Python-PSCAD联合仿真方法,以综合ITAE指标为目标函数,实现了原始MFO算法和改进MFO算法应用于背靠背MMC-HVDC并网复合装置滑模变控制器参数的优化。仿真结果表明,控制器参数整定问题得到了解决,同时控制器的性能也得到了有效提升,从而提高了系统的动态和静态性能。
(3) 本文通过仿真分析验证了所提控制器参数优化算法的有效性,可为实际工程控制器参数的调制提供一定的理论依据。
参考文献
新能源并网逆变器控制策略研究综述与展望
[J].
Review and perspectives on control strategies for renewable energy grid-connected inverters
[J].
电压型换流器实现电网间同期并列的原理及仿真研究
[J].
Research on the principle and simulation of synchronization parallel between grids by VSC
[J].
Research on implementation of compound function based on back-to-back VSC in power grid parallel
[C]//
基于背靠背VSC-HVDC同期并列装置转换为UPFC的策略研究
[J].
Research on control strategy of synchronization paralleling device converted into unified power flow controller based on back-to-back VSC-HVDC
[J].
基于背靠背VSC-HVDC电网间同期并列装置实现UPFC的仿真研究
[J].
Simulation study on achieving UPFC of simultaneous paralleling device based on back to back VSC-HVDC
[J].
基于功率传递的同期并列装置实现SSSC功能的仿真
[J].
Simulation of implementing SSSC function converting from grid paralleling device based on power through transmission
[J].
Research on power oscillation suppression strategy of grid-connected composite system based on impedance optimization
[C]//
基于改进果蝇算法优化的微电网逆变器恒功率控制算法
[J].
Constant power control algorithm for a microgrid inverter based on an improved fruit fly algorithm
[J].
基于改进MOPSO的MMC控制参数多机联合优化
[J].
Multi-machine joint parameters optimization of MMC controller based on improved MOPSO
[J].
Neural-fuzzy-based adaptive sliding mode automatic steering control of vision-based unmanned electric vehicles
[J].
DOI:10.1186/s10033-020-00524-5
[本文引用: 1]

Current research on quadrotor modeling mainly focuses on theoretical analysis methods and experimental methods, which have problems such as weak adaptability to the environment, high test costs, and long durations. Additionally, the PID controller, which is currently widely used in quadrotors, requires improvement in anti-interference. Therefore, the aforementioned research has considerable practical significance for the modeling and controller design of quadrotors with strong coupling and nonlinear characteristics. In the present research, an aerodynamic-parameter estimation method and an adaptive attitude control method based on the linear active disturbance rejection controller (LADRC) are designed separately. First, the motion model, dynamics model, and control allocation model of the quad-rotor are established according to the aerodynamic theory and Newton–Euler equations. Next, a more accurate attitude model of the quad-rotor is obtained by using a tool called CIFER to identify the aerodynamic parameters with large uncertainties in the frequency domain. Then, an adaptive attitude decoupling controller based on the LADRC is designed to solve the problem of the poor anti-interference ability of the quad-rotor and adjust the key control parameter b0 automatically according to the change in the moment of inertia in real time. Finally, the proposed approach is verified on a semi-physical simulation platform, and it increases the tracking speed and accuracy of the controller, as well as the anti-disturbance performance and robustness of the control system. This paper proposes an effective aerodynamic-parameter identification method using CIFER and an adaptive attitude decoupling controller with a sufficient anti-interference ability.
Moth-flame optimization algorithm:A novel nature-inspired heuristic paradigm
[J].DOI:10.1016/j.knosys.2015.07.006 URL [本文引用: 1]
基于飞蛾扑火优化算法的多运行方式电力系统稳定器参数协调优化方法
[J].
Multi-operation mode PSS parameter coordination optimization method based on moth-flame optimization algorithm
[J].
基于飞蛾扑火优化算法的电力系统最优潮流计算
[J].
Optimal power flow calculation with moth-flame optimization algorithm
[J].
一种改进滑模观测器的PMSM矢量控制研究
[J].
Research on vector control of PMSM based on an improved sliding mode observer
[J].
基于改进灰狼算法的DG接入配电网反时限过电流保护定值优化
[J].
Optimal setting method of inverse time over-current protection for a distribution network based on the improved grey wolf optimization
[J].
计及N-1安全约束的输电网阻塞管控数据驱动模型
[J].
A data-driven model for transmission congestion management considering N-1 static security constraints
[J].
基于边缘计算的能量自治区域调度策略
[J].
Energy autonomous region scheduling strategy based on edge computing
[J].
基于改进磷虾群算法优化Elman神经网络的PEMFC电堆建模
[J].
PEMFC stack modeling based on Elman neural network optimized by improved krill herd algorithm
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}