基于降阶解耦的五相容错伺服电机驱动系统容错控制策略*
薛荣泽 , 1 , 蒋雪峰 , 1 , 孙延超 , 2 , 汤欣喜 , 2 , 高宇飞 , 2 , 魏之建 , 1 , 马凯 , 1
1.南京理工大学自动化学院 南京 210094
2.中国航天科工南京晨光集团有限责任公司 南京 210006
Research on Fault-tolerant Control of Five-phase Fault-tolerant Servo Motor Drive System Based on Reduced-order Decoupling
XUE Rongze , 1 , JIANG Xuefeng , 1 , SUN Yanchao , 2 , TANG Xinxi , 2 , GAO Yufei , 2 , WEI Zhijian , 1 , MA Kai , 1
1. School of Automation, Nanjing University of Science & Technology, Nanjing 210094
2. China Aerospace Science and Technology Nanjing Chenguang Group Co., Ltd., Nanjing 210006
通讯作者: 蒋雪峰,男,1987年生,博士,副教授,硕士研究生导师。主要研究方向为电机及其控制、容错伺服、故障诊断与健康监测等。E-mail:jxf@njust.edu.cn
收稿日期: 2023-05-25
修回日期: 2023-06-26
基金资助:
*江苏省研究生科研与实践创新计划资助项目 (KYCX23_0462 )
Received: 2023-05-25
Revised: 2023-06-26
作者简介 About authors
薛荣泽,男,2000年生,硕士研究生。主要研究方向为容错伺服电机的驱动控制。E-mail:XRZ611@njust.edu.cn
孙延超,男,1987年生,硕士,高级工程师。主要研究方向为电机及其控制。E-mail:510291818@163.com
汤欣喜,男,1993年生,博士,工程师。主要研究方向为电力电子与电力传动。E-mail:tangxxi@nuaa.edu.cn
高宇飞,男,1995年生,硕士,工程师。主要研究方向为电机及其控制。E-mail:g0y0f10@163.com
魏之建,男,1996年生,硕士研究生。主要研究方向为永磁容错电机系统的设计与控制。E-mail:weizj@njust.edu.cn
马凯,男,2000年生,硕士研究生。主要研究方向为永磁容错电机设计与优化。E-mail:makai@njust.edu.cn
摘要
为提高作战装备的统战性能和可靠性,电驱动系统在武器装备中起到越来越重要的作用,高可靠的电驱动武器装备成为各国力求突破的方向。针对导弹电动舵机因工作环境恶劣导致不可避免的电气故障、常常不能可靠稳定运行的问题,提出一种具备高可靠性的五相容错伺服电机(Permanent magnet fault-tolerant servo motor,PMFSM)伺服系统,为了维持有效定子磁动势不变,实现对故障模式下电机驱动系统的矢量控制策略,提出一套适用于单相开路故障下的Clark和Park变换矩阵。针对故障模式下绕组中性点位偏移对空间矢量脉宽调制(Space vector pulse width modulation,SVPWM)的影响,提出了一种电压补偿策略减弱中性点电位偏移对SVPWM的影响,通过仿真和试验验证所提的五相PMFSM驱动系统的容错控制策略可以使五相PMFSM在绕组单相开路故障下高可靠容错运行,使导弹电动舵机系统有更高的可靠性和更强的容错性。
关键词:
五相容错伺服电机 空间电压矢量脉宽调制 开路故障 容错控制 电动舵机
Abstract
In order to improve the unified performance and reliability of combat equipment, electric drive systems play an increasingly important role in weapons and equipment. Highly reliable electric drive weaponry has become the direction in which countries are striving to break through. A highly reliable five-phase permanent magnet fault-tolerant servo motor(PMFSM) servo system for missile electric servos is proposed, which often fail to operate reliably and stably due to inevitable electrical failures caused by the harsh working environment. In order to maintain the effective stator magnetomotive force constant and realize the vector control strategy for the motor drive system in fault mode, a set of Clark and Park transformation matrix for single-phase open-circuit fault is proposed. A voltage compensation strategy is proposed to attenuate the effect of neutral potential shift on space vector pulse width modulation(SVPWM) for the winding neutral position shift in fault mode. The proposed fault-tolerant control strategy for the five-phase PMFSM drive system is verified through simulation and experiment to enable highly reliable fault-tolerant operation of the five-phase PMFSM under single-phase open circuit faults in the windings, resulting in a more reliable and fault-tolerant missile electric servo system.
Keywords:
Five-phase permanent magnet fault-tolerant servo motor space vector pulse width modulation open circuit fault fault tolerant control electric steering gear
本文引用格式
薛荣泽, 蒋雪峰, 孙延超, 汤欣喜, 高宇飞, 魏之建, 马凯. 基于降阶解耦的五相容错伺服电机驱动系统容错控制策略* [J]. 电气工程学报, 2023, 18(4): 124-133 doi:10.11985/2023.04.014
XUE Rongze, JIANG Xuefeng, SUN Yanchao, TANG Xinxi, GAO Yufei, WEI Zhijian, MA Kai. Research on Fault-tolerant Control of Five-phase Fault-tolerant Servo Motor Drive System Based on Reduced-order Decoupling [J]. Chinese Journal of Electrical Engineering , 2023, 18(4): 124-133 doi:10.11985/2023.04.014
1 引言
导弹舵机是导弹飞行控制系统的重要组成部分,是导弹方向控制的执行机构。导弹舵机系统是一个高精度的位置伺服系统,导弹能按照一定轨迹在空间中飞行,需要舵机带动并随时校正方向,因此导弹舵机的性能将直接影响导弹的动态品质和命中目标的准确率[1 ] 。由于电动舵机伺服系统简单可靠、易于控制且成本较低,对电动舵机伺服系统的研究在军事科技领域引起了许多学者的关注和深入研究[2 -3 ] 。随着电力电子技术和交流伺服技术的不断发展,目前电动舵机已经得到了广泛的应用,提高了高性能电动舵机伺服系统研究开发的可能性[4 ] 。而电动舵机系统采用电机驱动,不可避免会出现电气故障[5 ] ,电驱动系统中开路故障是最常见的故障类型之一,若发生故障后未采取容错控制策略,将会导致绕组过热、绝缘损坏、转矩降低的一系列问题,甚至会损坏整个系统[6 ⇓ ⇓ -9 ] 。因此,目前国内外研究的主要方向之一就是开路故障下多相电机的容错控制策略。
传统电动舵机多采用三相永磁同步电机的三环位置伺服系统[10 ] 。而传统三相永磁电机的三相半桥驱动系统在发生缺相故障后无法进行容错运行,在需要可靠性应用的场合,通常采用具备容错能力的三相永磁电机拓扑系统来实现电机的容错运行[11 -12 ] ,但是也会带来体积重量大、系统利用率低以及无法抑制短路电流等问题。而相较于传统的三相永磁电机驱动系统,多相永磁电机驱动系统具有更高的功率密度,高控制自由度和强容错能力等特点[13 -14 ] ,高控制自由度使得电机能够在不增加任何额外硬件措施的情况下实施容错控制,将其应用于导弹舵机系统中可以解决传统三相永磁电机驱动系统在采用容错拓扑时系统结构复杂的问题。
针对多相电机控制策略和容错运行策略的研究,文献[15 ]建立了五相永磁电机开路故障后基波电流平面与三次谐波电流平面的关系,通过离线计算求得了三次谐波平面的扰动系数,通过注入三次谐波的方法减少了故障带来的转矩脉动,并且缩短了运行模式的切换时间,该方法有效地减少了故障带来的转矩脉动。文献[16 ]基于故障前后旋转磁动势不变的原理,重构了剩余自由相电流的幅值和相位,实现电机的容错运行,但由于采用电流滞环控制,存在开关频率不固定和电流波动大的问题。文献[17 ]通过分析不同情况下缺相容错电流的表达式,提出二次旋转变换对电机磁场定向解耦,该算法可以提高电机的容错运行能力,但其计算复杂度高。文献[18 -19 ]基于五相永磁电机提出模型预测电流控制的方法抑制共模电压,并在代价函数中引入了三次谐波电流有效减小了谐波电流占比。文献[20 ]基于五相电机采用模型预测转矩控制实现容错控制,通过查表的方法筛选可以利用的矢量集合,从而减小了遍历次数,简化了运算过程。但现有研究鲜有对多相永磁电机伺服系统的容错性能进行研究,有待于进一步研究多相电机伺服系统的容错控制策略。
本文针对现有导弹电动舵机系统功率密度低和容错拓扑电路系统冗余利用率低的问题,提出一种基于降阶解耦的五相容错伺服电机(Permanent magnet fault-tolerant servo motor,PMFSM)驱动控制系统的单相故障容错控制策略。首先,提出了适用于单相开路故障的Clark和Park变换矩阵,得到了单相开路故障下的电机解耦控制模型;然后,对故障后不对称运行而引起的中性点偏移问题进行电压补偿,在此基础上推导出单相缺相后的基本空间电压矢量,在基波平面采用虚拟矢量法,用8个利用率较高的基本矢量合成4个虚拟矢量,再利用2个基本电压空间矢量,将基波平面分成了6个扇区,通过对6个扇区的划分和6个非零空间电压矢量的合成得到基波平面的参考矢量,在β 3 ![]()
2 五相PMFSM驱动系统
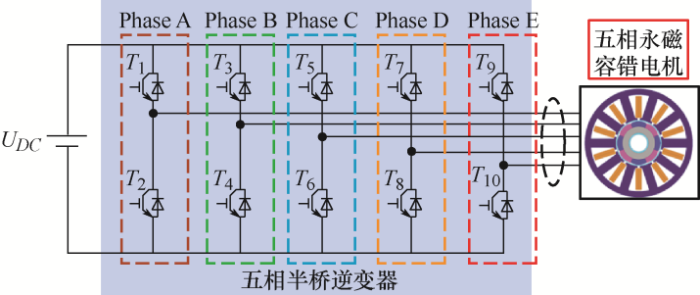
一种基于五相PMFSM的驱动系统结构如图1 所示,其包括一台五相PMFSM,一套五相半桥逆变器和一个独立的400 V直流电源。由于五相容错伺服电机的高控制自由度,可以在发生单相绕组开路故障时仍具有3个自由度,因此在不增加任何硬件措施下就可以实现电机的容错运行,具有强容错性和高电气隔离能力。
图1
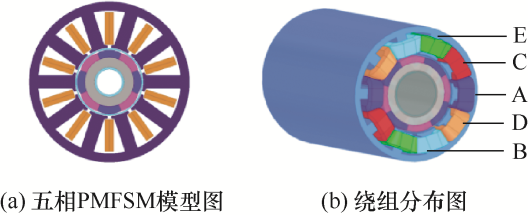
五相PMFSM的本体如图2a 所示,绕组分布如图2b 所示,电机采用10槽8极分数槽双层集中绕组结构,两相槽间隔电角度为144°,绕组无重叠,具备端部绕线少、用铜量少、能较好地抑制谐波、电机输出转矩脉动小等优点。
图2
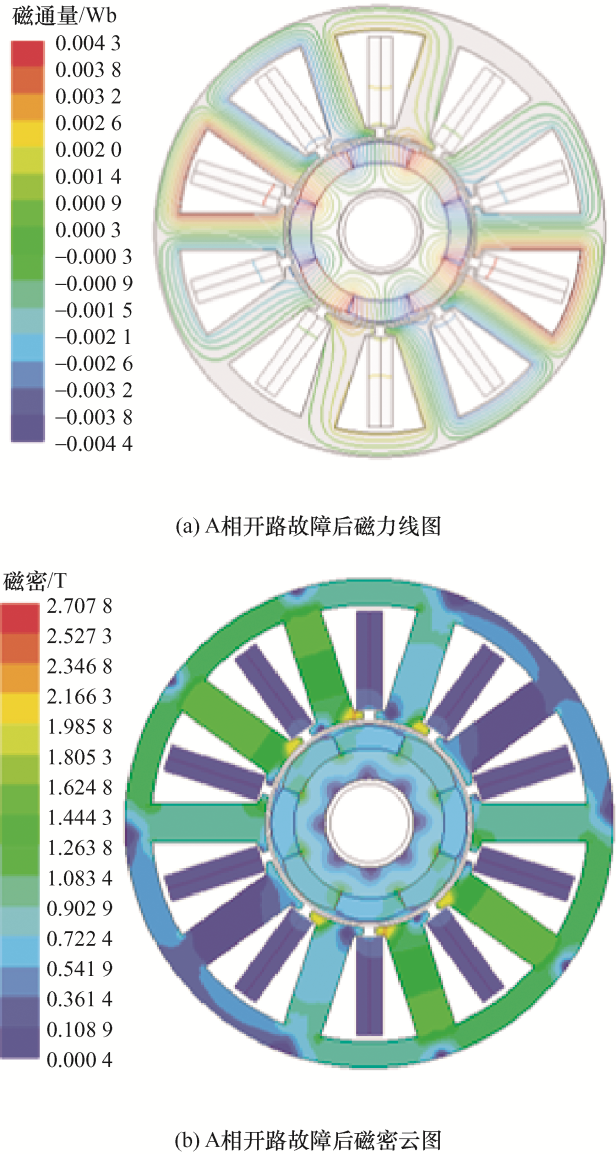
五相PMFSM应用于高可靠性的场合,需要具备容错能力,在定子绕组单相开路故障下,本文以A相为例,在A相开路故障磁力线图如图3a 所示,可以发现故障后各相绕组磁力线无耦合,电机有良好的磁隔离能力;五相PMFSM在A相开路故障后磁密云图如图3b 所示,可以看出定子齿和定子磁轭在故障后的最大磁通密度不超过1.8 T,而所采用电机的硅钢片饱和磁通密度为2.2 T,满足设计需求。
图3
3 五相PMFSM单相开路容错控制策略
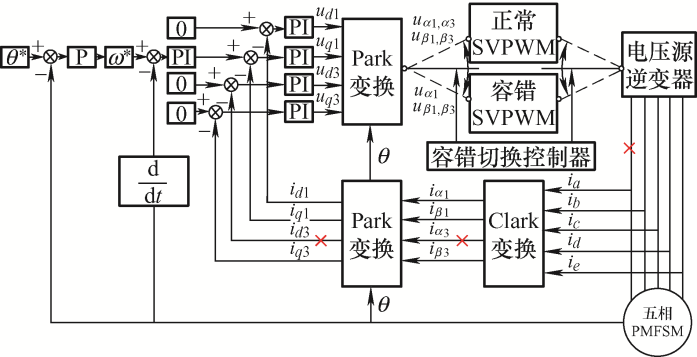
五相PMFSM伺服系统单相开路故障下容错控制策略框图如图4 所示,主要由五相PMFSM、位置控制器、转速PI控制器、电流PI控制器、坐标变换算法模块、正常空间矢量脉宽调制(Space vector pulse width modulation,SVPWM)算法模块、容错SVPWM算法、逆变器等构成。当发生故障后,通过分别将正常状态的坐标变化模块和SVPWM算法模块切换至对应故障状态下的降阶坐标变换模块和容错SVPWM算法模块来实现五相PMFSM的容错运行。
图4
3.1 单相故障下五相PMFSM降阶解耦变换
在发生单相开路故障后,电机控制的自由度减小,对应的变换矩阵要进行降阶处理,本文以A相为例,此时剩余有效相B、C、D、E四相,加以零序电流的约束,此时的五相永磁电机有3个自由度,可以得到该故障下的降阶Clark矩阵为
(1) T = 2 5 cos δ cos 2 δ cos 3 δ cos 4 δ sin δ sin 2 δ sin 3 δ sin 4 δ sin δ sin 6 δ sin 9 δ sin 12 δ 1 2 1 2 1 2 1 2 ![]()
当故障发生后,保证定子空间任一位置角上的定子磁动势与正常模式保持一致,理论上便可以实现五相电机在开路故障模式下的容错运行。根据定子磁动势的约束条件,可以推导出定子电流的表达式,采用零序电流去修正系数矩阵的第一行向量,即对式(1)进行矩阵初等变换,修正后的容错控制电流配置为
(2) 2 5 cos δ − i cos 2 δ − i cos 3 δ − i cos 4 δ − i sin δ sin 2 δ sin 3 δ sin 4 δ sin δ sin 6 δ sin 9 δ sin 12 δ 1 2 1 2 1 2 1 2 i B i C i D i E = i α 1 i β 1 i β 3 0 ![]()
式中,修正系数i = 1 ![]()
α 1 ![]()
β 1 ![]()
β 3 ![]()
β 3 ![]()
旋转变换用以将故障后静止坐标系下的电流投影到旋转坐标系下,从而将交变量转化为直流量。而单相故障后的3个自由度只可以使得α 1 ![]()
β 1 ![]()
(3) T park_A = c o s θ s i n θ 0 0 − s i n θ c o s θ 0 0 0 0 1 0 0 0 0 1 ![]()
经过上述两种坐标变换,可以实现A相故障下五相PMFSM的降阶解耦,通过分别控制3个维度的电流实现电机在单相开路状态下的容错运行。
对单相开路故障后的五相PMFSM降阶解耦后,采取i d = 0 ![]()
i q 3 * ![]()
最小铜损约束要求基波电流和谐波电流平方和最小,对于五相PMFSM驱动系统,令i q 3 * =0 ![]()
(4) i A = 0 i B = 1.468 i q 1 sin ( θ + 0.775 6 π ) i C = 1.263 i q 1 sin ( θ + 0.154 1 π ) i D = 1.263 i q 1 sin ( θ − 0.154 1 π ) i E = 1.468 i q 1 sin ( θ − 0.775 6 π ) ![]()
相电流等幅值约束能实现故障后剩余有效相电流幅值相等,此时剩余有效相电流关于故障轴线对称,以A相开路故障为例,即引入了新的约束i b = − i d ![]()
i c = − i e ![]()
β 1 ![]()
β 3 ![]()
i q 3 * = 0.236 i q 1 * cos θ ![]()
相电流等幅值约束中需要引入基波平面的q 轴电流给定i q 1 * ![]()
θ ![]()
i q 3 * ![]()
i d 1 * = i q 3 * =0 ![]()
i q 1 * ![]()
图4 所示。
3.2 单相故障下五相PMFSM的SVPWM算法
以A为例,A相开路故障下,逆变器有效相电压可用开关状态矢量表示为
(5) u B u C u D u E =U D C 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 S B S C S D S E − U D C 2 + u N O 1 1 1 1 ![]()
(7) u N O + U D C 2 = U D C 4 S B + S C + S D + S E + 1 4 u A ![]()
在单相故障的影响下,电机的中性点电位会发生偏移,这样的电压偏移会对SVPWM算法产生影响。为消除此影响,本文在控制算法的前向通道中进行电压补偿,用补偿后的电压作SVPWM算法的输入电压进行调制,以A相开路故障为例的电压补偿过程如下
(8) u α 1 u β 1 u β 3 u 0 = v α 1 v β 1 v β 3 u 0 + 1 2 u α 0 0 0 ![]()
式中,v α 1 ![]()
v β 1 ![]()
v β 3 ![]()
α 1 ![]()
β 1 ![]()
β 3 ![]()
(9) v α 1 v β 1 v β 3 = 2 5 T A _ c o m u b u c u d u e ![]()
式中,T A _ c o m ![]()
(10) T A _ c o m = 2 5 cos δ+ 1 4 cos 2 δ+ 1 4 cos 3 δ+ 1 4 cos 4 δ+ 1 4 s i n δ s i n 2 δ s i n 3 δ s i n 4 δ s i n 3 δ s i n 6 δ s i n 9 δ s i n 12 δ ![]()
驱动系统发生A相开路故障时,该相所对应的电流为0,因此A相端电压和A相反电动势相等,v α 1 ![]()
v β 1 ![]()
v β 3 ![]()
u α 1 ![]()
u β 1 ![]()
u β 3 ![]()
(11) v α 1 =u α 1 − 1 2 u A = u α 1 − 1 2 e A v β 1 = u β 1 v β 3 = u β 3 ![]()
(12) v α 1 v β 1 v β 3 = 2 5 U D C T A _ c o m S b S c S d S e ![]()
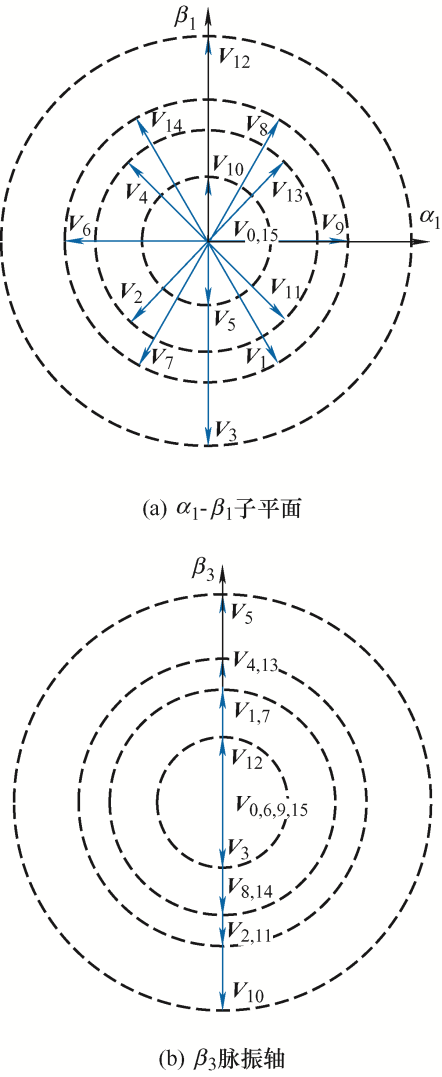
此时的电压经电压补偿,不再受电机运行状态影响,可以对单相开路故障下五相PMFSM的端电压进行矢量脉宽调制,基本空间电压矢量分布图如图5 所示。
图5
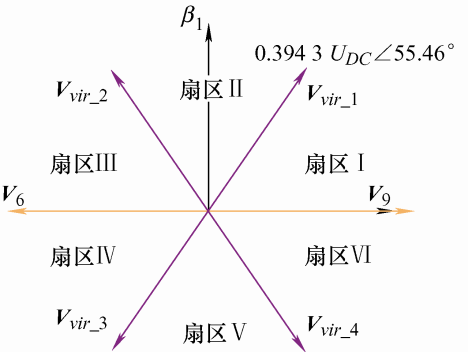
为实现对基波平面的空间电压矢量的合成,考虑到基波空间电压矢量的利用率,选取V 8 ![]()
V 13 ![]()
V 4 ![]()
V 14 ![]()
V 2 ![]()
V 7 ![]()
V 1 ![]()
V 11 ![]()
V 6 ![]()
V 9 ![]()
β 3 ![]()
图6 所示。
(13) T 8 T 13 = T 14 T 4 = T 7 T 2 = T 1 T 11 = 0.380 4 0.235 1 =1.618 ![]()
图6
在确定参考矢量后需要计算矢量作用时间,求解过程可以是将参考矢量和相邻两矢量分别投影在α 1 ![]()
β 1 ![]()
此外,推导在β 3 ![]()
V 5 ![]()
V 12 ![]()
V 3 ![]()
V 10 ![]()
(14) T 5 T 12 = T 10 T 3 = 0.615 5 0.145 3 =4.236 1 ![]()
在分别求得各扇区作用时间后,可以实现对两个子平面共同调制,考虑到减小开关损耗,采用中心对称原则选择功率管开关顺序,零矢量作用时间不变,高电平采取中心对称处理。
4 仿真结果及分析
为对上述策略的正确性进行初步验证,本文基于Matlab搭建了五相PMFSM的驱动系统的容错控制策略仿真,系统结构主要有以下部分:五相PMFSM、五相电压型逆变器、电流PI控制器、转速PI控制器、位置控制器、正常SVPWM算法模块和容错SVPWM算法模块。基于Matlab的模型可以实现五相容错伺服电机单相开路故障容错策略的仿真验证。
4.1 转速电流双闭环控制仿真
4.1.1 未采取容错策略
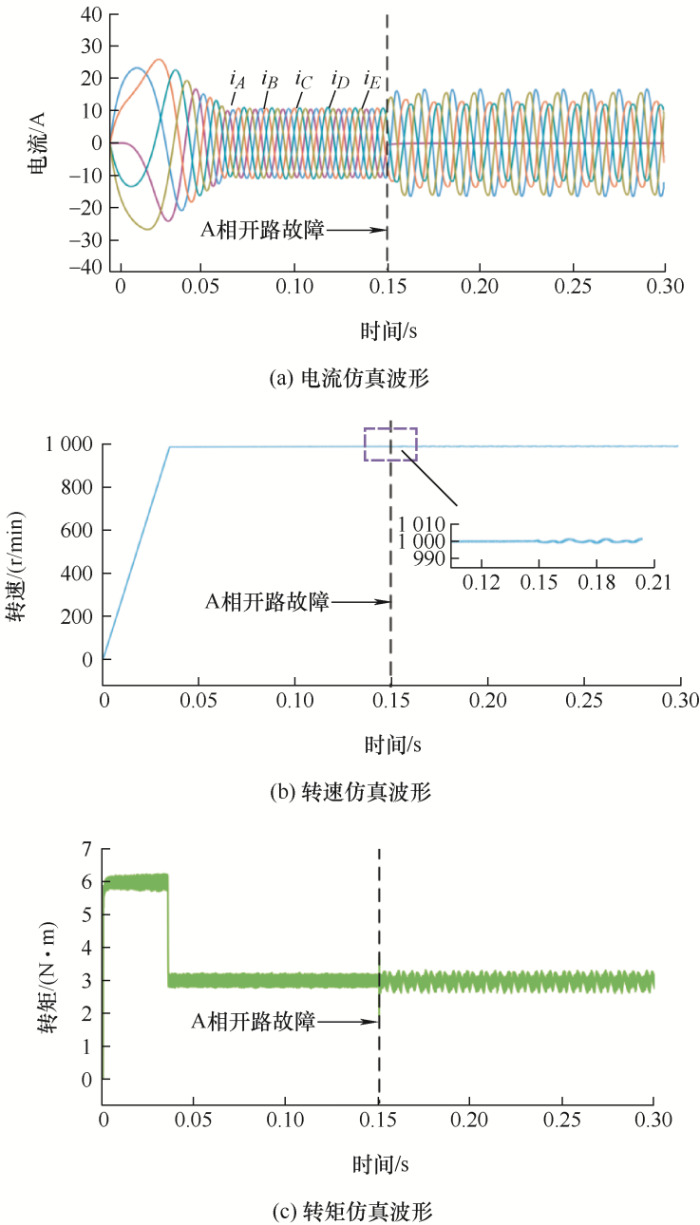
设置0.15 s发生A相绕组开路故障。电机绕组开路故障前后的五相容错伺服电机的电流、转速、转矩的仿真波形如图7 所示。
图7
![]()
由图7a 可以看出,当A相开路故障后,A相电流变为0,而B、C、D、E相电流发生严重畸变;由图7b 和图7c 可以发现,在A相绕组开路故障后未采取容错策略时,转矩脉动很大,转速逐渐下降并有较大脉动,已经无法维持在给定值,若电机继续在故障下运行状态将会严重受损。
4.1.2 采取容错策略
设置0.15 s发生A相绕组开路故障并且同时采取容错控制策略。电机绕组开路故障前后的五相容错伺服电机的电流、转速、转矩的仿真波形如图8 所示。
图8
在采取容错控制策略后,由图8 可以看出,A相开路故障后A相电流减为0,剩余健康相绕组电流能保持较好的正弦波形,各相电流幅值与理论分析一致;采取容错策略后,电机的转速在故障后仍然能跟随给定转速信号并保持稳定;采取容错控制策略后,电机的转矩脉动较小,与故障前基本保持一致,验证了容错控制策略的正确性。
4.2 三环控制仿真
4.2.1 未采取容错控制策略
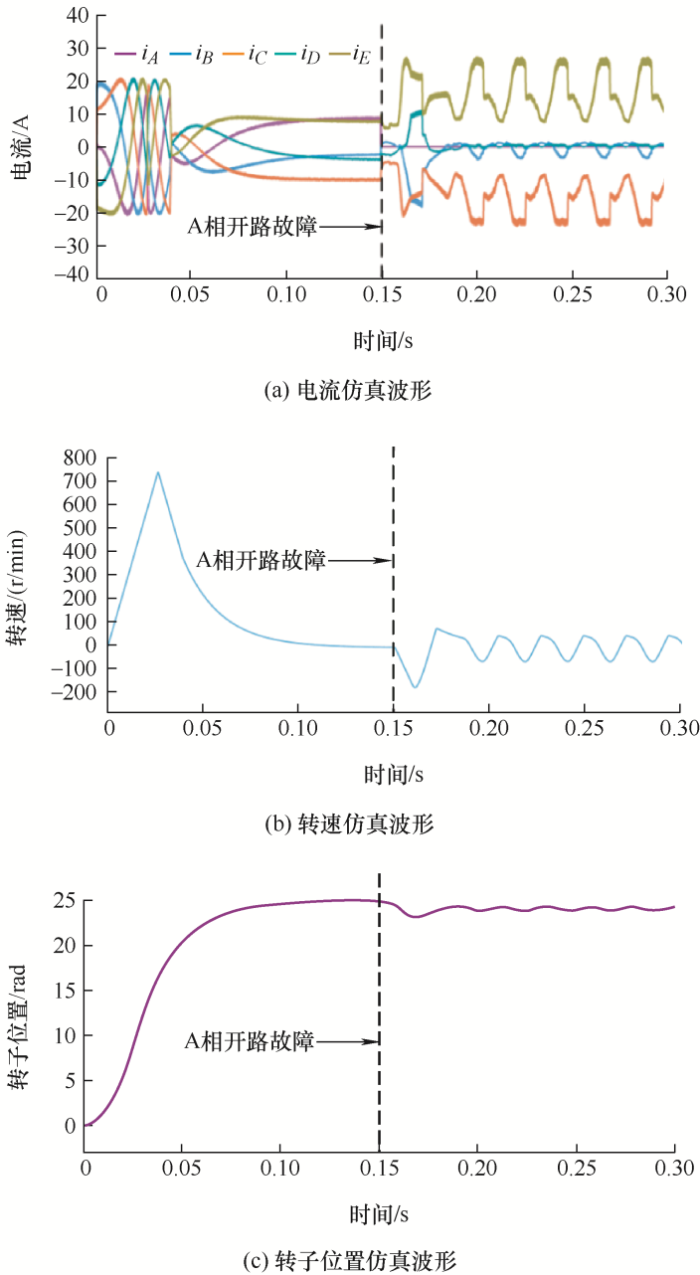
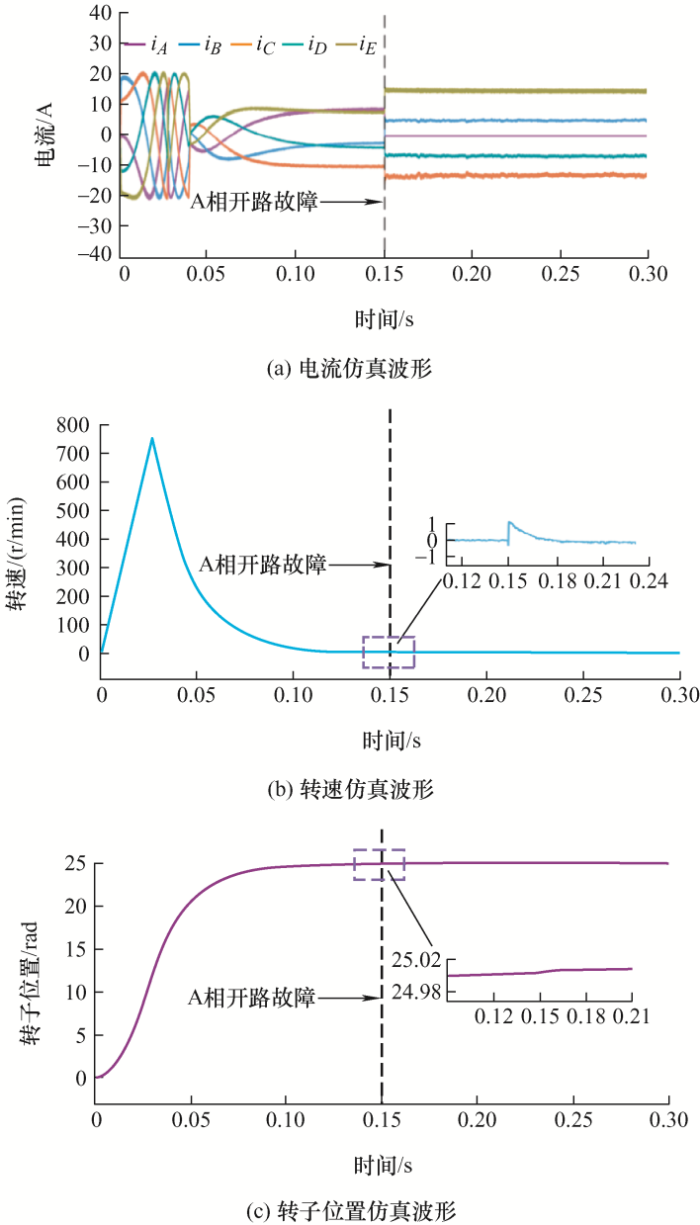
在上述两闭环系统外再增加位置外环,给定转子信号为25 rad,设置0.15 s发生A相绕组开路故障。电机绕组开路故障容错前后五相容错伺服电机的电流、转速和转子位置的仿真波形如 图9 所示。
图9
由图9 可以看出,当A相开路故障之前,电机能够跟随在给定转子位置信号,并在达到指定位置后转速降为0;在A相绕组开路故障后未采取容错策略时,A相电流降为0,剩余有效相电流严重畸变,转速开始波动不能维持在0,转子位置不能保持在设定的信号位置。
4.2.2 采取容错控制策略
给定转子信号为25 rad,设置0.15 s发生A相绕组开路故障并同时采取容错算法。电机绕组开路故障容错前后五相容错伺服电机的电流、转速和转子位置的仿真波形如图10 所示。
图10
由图10 可以看出,当A相开路故障之前,电机能够跟随在给定转子位置信号,并在达到指定位置后转速降为0;在A相绕组开路故障后并采取容错策略时,转速仍然可以维持在0,转子位置保持在设定的信号位置不变,进一步验证容错策略的正确性。
5 试验验证
5.1 试验平台
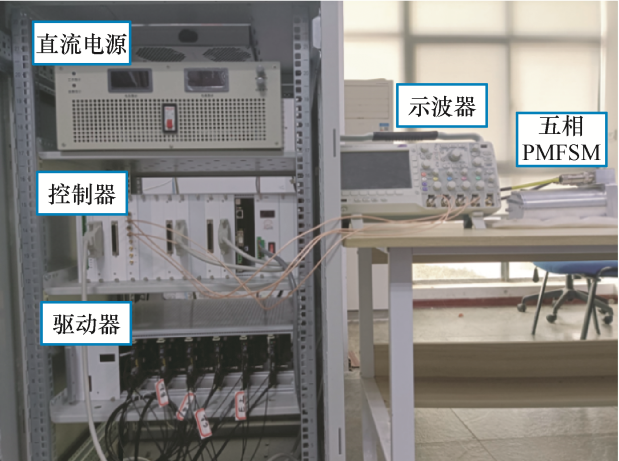
五相PMFSM系统驱动系统的试验平台如图11 所示,试验平台组成如下:一台五相PMFSM、一台基于DSP+FPGA架构的实时数字控制器RTU-BOX204、模块化逆变器、示波器等。模块化的驱动器共有六相,可组成所需要的一套五相逆变器。主处理器采用了TI公司的TMS320C28346,主频为300 MHz。五相PMFSM由旋转变压器得到电机的转速与位置信号。
图11
5.2 转速电流双闭环控制系统
在五相PMFSM空载运行过程中,将A相断开并启用容错控制策略,试验波形如图12 所示。
图12
当A相发生电机绕组开路故障时,A相电流变为0,同时采取容错控制策略,使电机进入容错运行模式。发现在A相绕组开路故障后五相PMFSM转速与正常运行一样,保持在给定转速,交轴电流i q ![]()
由于处在稳态时转速环输出的给定i q 1 * = 0 ![]()
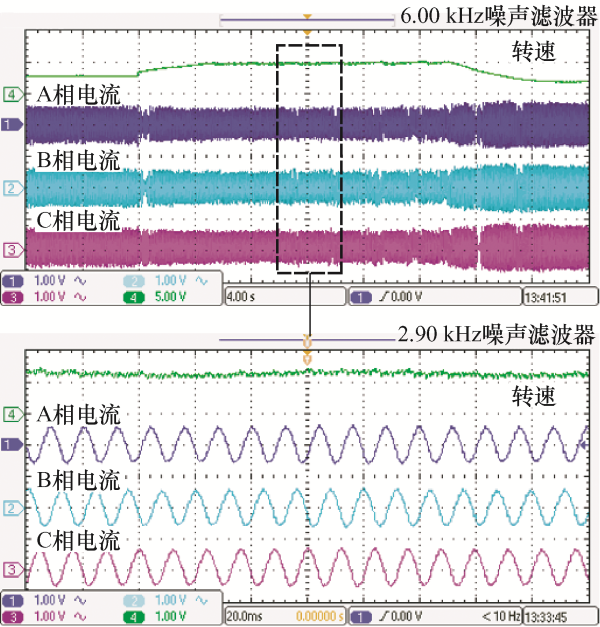
图13 是电机调速时的波形,给定转速增加的信号,但受到母线电压的限制,电机转速不能一直增加,此时的转速环输出,即q 轴电流给定i q 1 * ≠ 0 ![]()
图13
试验的目的是验证容错策略的正确性,通过对比试验前后五相PMFSM的运行性能验证容错策略的可行性,因此采用了基本的空载稳态的状态进行研究,电流波形有一定谐波对试验结论影响较小。
5.3 三环控制试验
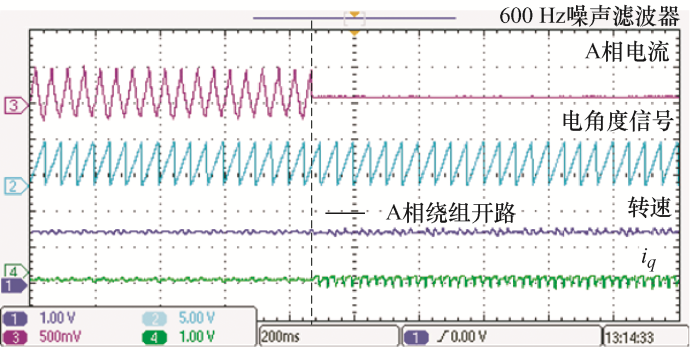
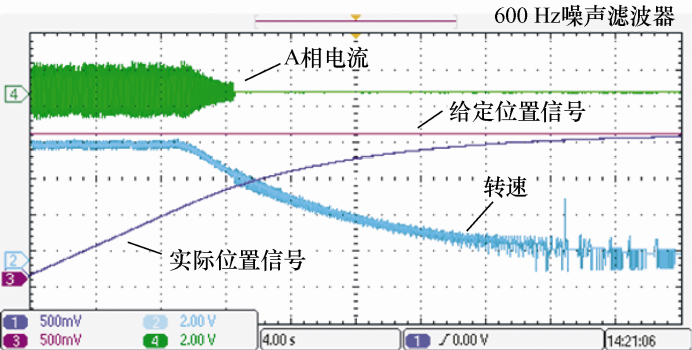
验证双闭环控制系统稳定后,在双闭环控制系统基础上增加位置环,为验证基于五相PMFSM三闭环控制系统的容错能力,在电机到达给定位置信号之前,断开A相电机绕组同时采取容错控制策略,观察此时的电机位置信号和转速波形。
从试验波形可以发现,A相绕组发生开路故障并容错运行后,五相PMFSM的实际位置信号能够精准跟随给定位置信号,并在达到给定信号后转速降为0,由于试验采取M法测量转速,M法在低速情况下有一定误差,导致转速在降为0时波形有毛刺(图14 ),从实际位置信号可以看出,电机转子位置较为平滑地跟随给定信号后保持在给定信号,进一步说明电机的实际转速较为平滑地降为0后停转,因此控制策略能够实现五相PMFSM在单相开路故障下准确跟随给定信号,验证了电机控制的容错能力。
图14
6 结论
本文针对导弹电动舵机功率密度低以及常常存在电气故障的问题,提出了一种基于降阶解耦的五相容错伺服电机单相开路故障的容错控制策略,通过仿真和试验发现,驱动系统和控制策略有以下特点。
(1) 所提五相PMFSM在单相故障后有较好的磁隔离能力,且最大磁通密度也不会超过硅钢片的饱和值。
(2) 该策略通过推导故障后的降阶变换矩阵,实现了对故障后电机模型的解耦控制,并推导了故障后电压空间矢量,分别对基波子平面和脉振轴的参考矢量的共同调制过程进行分析,推得了单相开路故障时五相容错伺服电机的容错SVPWM算法,能实现五相PMFSM在单相开路故障时的高可靠容错运行。
(3) 在五相PMFSM发生单相开路故障后,采用该容错控制策略可以精准跟随给定信号,具有故障后容错运行的能力,能较好地适应导弹舵机恶劣且易受扰动的运行环境。
五相容错伺服电机驱动系统有优于三相永磁电机驱动系统更高的控制自由度和更强的容错能力,高控制自由度可以实现电机在不增加任何额外硬件措施下实施容错控制,可以避免三相永磁电机驱动系统在采取容错拓扑后系统变得复杂的问题。本文提出的五相容错伺服电机的容错控制策略能够确保系统在单相故障的情况下高可靠容错运行。最后根据仿真和试验结果验证了容错控制策略的稳定性和有效性,以期使导弹电动舵机系统有更高的控制性能。
参考文献
View Option
[1]
汤立勋 . 导弹舵机用永磁同步电机控制系统设计 [D]. 武汉 : 华中科技大学 , 2019 .
[本文引用: 1]
TANG Lixun Design of permanent magnet synchronous motor control system for missile rudder [D]. Wuhan : Huazhong University of Science and Technology , 2019 .
[本文引用: 1]
[2]
聂磊 . 无人机电动舵机系统设计与控制技术研究 [D]. 哈尔滨 : 哈尔滨工业大学 , 2019 .
[本文引用: 1]
NIE Lei Study on design and control technology of electromechanical actuator system of UAV [D]. Harbin : Harbin Institute of Technology , 2019 .
[本文引用: 1]
[3]
高尚文 . 无人直升机电动舵机控制系统设计与实现 [D]. 南京 : 南京航空航天大学 , 2021 .
[本文引用: 1]
GAO Shangwen Design and implementation of electromechanical actuator control system for unmanned helicopter [D]. Nanjing : Nanjing University of Aeronautics and Astronautics , 2021 .
[本文引用: 1]
[4]
黄前柱 . 导弹舵机用永磁同步电机控制系统的研究 [D]. 内蒙古 : 内蒙古科技大学 , 2021 .
[本文引用: 1]
HUANG Qianzhu Research on control system of permanent magnet synchronous motor for missile rudder [D]. Inner Mongolia : Inner Mongolia University of Science and Technology , 2021 .
[本文引用: 1]
[5]
LI Qiang JIANG Xuefeng HUANG Wenxin et al. Fault-tolerant drive system based on the redundancy bridge arm for aerospace applications
[J]. IET Electric Power Applications , 2018 , 12 (6 ):780 -786 .
DOI:10.1049/elp2.v12.6
URL
[本文引用: 1]
[6]
ZHANG Zhaoyu JIN Shi ZHANG Zhifeng et al. Novel space vector PWM technology with lower common-mode voltage for dual three-phase PMSM
[J]. IET Power Electronics , 2020 , 13 (7 ):1426 -1433 .
DOI:10.1049/pel2.v13.7
URL
[本文引用: 1]
[7]
SHAHIN A E M MARTIN J P PIERFEDERIC S Zero-sequence current based diagnostic method for open-switch fault detection in parallel inverters system
[J]. IEEE Transactions on Power Electronics , 2018 , 34 (4 ):3750 -3764 .
DOI:10.1109/TPEL.63
URL
[本文引用: 1]
[8]
CHEN Qian ZHAO Wenxiang LIE Guohai et al. Extension of virtual-signal-injection-based MTPA control for five-phase IPMSM into fault tolerant operation
[J]. IEEE Transactions on Industrial Electronics , 2019 , 66 (2 ):944 -955 .
DOI:10.1109/TIE.41
URL
[本文引用: 1]
[9]
ZHAO Wenxiang WU Binyu CHEN Qian et al. Fault-tolerant direct thrust force control for a dual inverter fed open-end winding linear vernier permanent-magnet motor using improved SVPWM
[J]. IEEE Transactions on Industrial Electronics , 2018 , 65 (9 ):7458 -7467
DOI:10.1109/TIE.41
URL
[本文引用: 1]
[10]
王小东 . 导弹舵机用永磁同步电机智能控制技术研究 [D]. 太原 : 中北大学 , 2022 .
[本文引用: 1]
WANG Xiaodong Research on intelligent control technology of permanent magnet synchronous motor for missile rudder [D]. Taiyuan : North University of China , 2022 .
[本文引用: 1]
[11]
蒋雪峰 , 吴道宇 , 李强 , 等 . 基于DFPMM的共母线型双逆变器驱动系统缺任意两相容错运行研究
[J]. 中国电机工程学报 , 2022 , 42 (21 ):7982 -7995 .
[本文引用: 1]
JIANG Xuefeng WU Daoyu LI Qiang et al. Research on the fault-tolerant operation without any two-phase in common-bus dual-inverter drive system based on DPFMM
[J]. Proceedings of the CSEE , 2022 , 42 (21 ):7982 -7995 .
[本文引用: 1]
[12]
王兰凤 , 陈志辉 , 何海翔 , 等 . 四相电励磁双凸极电动机单相开路故障分析与容错控制策略
[J]. 电气工程学报 , 2016 , 11 (1 ):39 -46 .
[本文引用: 1]
WANG Lanfeng CHEN Zhihui HE Haixiang et al. Single-phase open-circuit fault analysis and fault-tolerant control strategy for four-phase electrically excited doubly salient motor
[J]. Journal of Electrical Engineering , 2016 , 11 (1 ):39 -46 .
[本文引用: 1]
[13]
周长攀 , 刘海峰 , 景国秀 , 等 . 非正弦反电势五相永磁同步电机容错矢量控制
[J]. 电气工程学报 , 2021 , 16 (4 ):108 -119 .
[本文引用: 1]
ZHOU Changpan LIU Haifeng JING Guoxiu et al. Fault-tolerant vector control of five-phase permanent magnet synchronous motor with non-sinusoidal back EMF
[J]. Journal of Electrical Engineering , 2021 , 16 (4 ):108 -119 .
[本文引用: 1]
[14]
刘自程 , 郑泽东 , 彭凌 , 等 . 船舶电力推进中十五相感应电机同轴运行及容错控制策略
[J]. 电工技术学报 , 2014 , 29 (3 ):65 -74 .
[本文引用: 1]
LIU Zicheng ZHENG Zedong PENG Ling et al. Coaxial operation and fault-tolerant control strategy of fifteen-phase induction motor in marine electric propulsion
[J]. Transactions of China Electrotechnical Society , 2014 , 29 (3 ):65 -74 .
[本文引用: 1]
[15]
孔金旺 . 五相永磁电机开路故障诊断技术与容错控制策略研究 [D]. 南京 : 南京航空航天大学 , 2021 .
[本文引用: 1]
KONG Jinwang Research on open-circuit fault diagnosis and fault-tolerant control strategy of five-phase permanent magnet motor [D]. Nanjing : Nanjing University of Aeronautics and Astronautics , 2021 .
[本文引用: 1]
[16]
赵文祥 , 唐建勋 , 吉敬华 , 等 . 五相容错式磁通切换永磁电机及其控制
[J]. 中国电机工程学报 , 2015 , 35 (5 ):1229 -1236 .
[本文引用: 1]
ZHAO Wenxiang TANG Jianxun JI Jinghua et al. Five-phase fault-tolerant flux-switched permanent magnet motor and its control
[J]. Proceedings of the CSEE , 2015 , 35 (5 ):1229 -1236 .
[本文引用: 1]
[17]
高宏伟 , 杨贵杰 . 五相永磁同步电机缺相运行的建模与控制
[J]. 电工技术学报 , 2016 , 31 (20 ):93 -101 .
[本文引用: 1]
GAO Hongwei YANG Guijie Modeling and control of five-phase permanent magnet synchronous motor in phase-out operation
[J]. Transactions of China Electrotechnical Society , 2016 , 31 (20 ):93 -101 .
[本文引用: 1]
[18]
YU Bin SONG Wensheng GUO Yongqi et al. Virtual voltage vectors based model predictive current control for five-phase vsis with common-mode voltage reduction
[J]. IEEE Transactions on Transportation Electrification , 2021 , 7 (2 ):706 -717 .
DOI:10.1109/TTE.2020.3030793
URL
[本文引用: 1]
[19]
YU Bin SONG Wensheng FENG Jiaxu A virtual voltage vectors based model predictive current control to reduce common-mode voltage for five-phase voltage source inverters
[C]// IEEE International Symposium on Predictive Control of Electrical Drives and Power Electronics (PRECEDE) May 31-June 2,2019,Quanzhou,China. IEEE , 2019 :1 -6 .
[本文引用: 1]
[20]
陈富扬 , 花为 , 黄文涛 , 等 . 基于模型预测转矩控制的五相磁通切换永磁电机开路故障容错策略
[J]. 中国电机工程学报 , 2019 , 39 (2 ):337 -346 .
[本文引用: 1]
CHEN Fuyang HUA Wei HUANG Wentao et al. Open-circuit fault tolerant strategy of five-phase flux-switched permanent magnet motor based on model predictive torque control
[J]. Proceedings of the CSEE , 2019 , 39 (2 ):337 -346 .
[本文引用: 1]
1
2019
... 导弹舵机是导弹飞行控制系统的重要组成部分,是导弹方向控制的执行机构.导弹舵机系统是一个高精度的位置伺服系统,导弹能按照一定轨迹在空间中飞行,需要舵机带动并随时校正方向,因此导弹舵机的性能将直接影响导弹的动态品质和命中目标的准确率[1 ] .由于电动舵机伺服系统简单可靠、易于控制且成本较低,对电动舵机伺服系统的研究在军事科技领域引起了许多学者的关注和深入研究[2 -3 ] .随着电力电子技术和交流伺服技术的不断发展,目前电动舵机已经得到了广泛的应用,提高了高性能电动舵机伺服系统研究开发的可能性[4 ] .而电动舵机系统采用电机驱动,不可避免会出现电气故障[5 ] ,电驱动系统中开路故障是最常见的故障类型之一,若发生故障后未采取容错控制策略,将会导致绕组过热、绝缘损坏、转矩降低的一系列问题,甚至会损坏整个系统[6 ⇓ ⇓ -9 ] .因此,目前国内外研究的主要方向之一就是开路故障下多相电机的容错控制策略. ...
1
2019
... 导弹舵机是导弹飞行控制系统的重要组成部分,是导弹方向控制的执行机构.导弹舵机系统是一个高精度的位置伺服系统,导弹能按照一定轨迹在空间中飞行,需要舵机带动并随时校正方向,因此导弹舵机的性能将直接影响导弹的动态品质和命中目标的准确率[1 ] .由于电动舵机伺服系统简单可靠、易于控制且成本较低,对电动舵机伺服系统的研究在军事科技领域引起了许多学者的关注和深入研究[2 -3 ] .随着电力电子技术和交流伺服技术的不断发展,目前电动舵机已经得到了广泛的应用,提高了高性能电动舵机伺服系统研究开发的可能性[4 ] .而电动舵机系统采用电机驱动,不可避免会出现电气故障[5 ] ,电驱动系统中开路故障是最常见的故障类型之一,若发生故障后未采取容错控制策略,将会导致绕组过热、绝缘损坏、转矩降低的一系列问题,甚至会损坏整个系统[6 ⇓ ⇓ -9 ] .因此,目前国内外研究的主要方向之一就是开路故障下多相电机的容错控制策略. ...
1
2019
... 导弹舵机是导弹飞行控制系统的重要组成部分,是导弹方向控制的执行机构.导弹舵机系统是一个高精度的位置伺服系统,导弹能按照一定轨迹在空间中飞行,需要舵机带动并随时校正方向,因此导弹舵机的性能将直接影响导弹的动态品质和命中目标的准确率[1 ] .由于电动舵机伺服系统简单可靠、易于控制且成本较低,对电动舵机伺服系统的研究在军事科技领域引起了许多学者的关注和深入研究[2 -3 ] .随着电力电子技术和交流伺服技术的不断发展,目前电动舵机已经得到了广泛的应用,提高了高性能电动舵机伺服系统研究开发的可能性[4 ] .而电动舵机系统采用电机驱动,不可避免会出现电气故障[5 ] ,电驱动系统中开路故障是最常见的故障类型之一,若发生故障后未采取容错控制策略,将会导致绕组过热、绝缘损坏、转矩降低的一系列问题,甚至会损坏整个系统[6 ⇓ ⇓ -9 ] .因此,目前国内外研究的主要方向之一就是开路故障下多相电机的容错控制策略. ...
1
2019
... 导弹舵机是导弹飞行控制系统的重要组成部分,是导弹方向控制的执行机构.导弹舵机系统是一个高精度的位置伺服系统,导弹能按照一定轨迹在空间中飞行,需要舵机带动并随时校正方向,因此导弹舵机的性能将直接影响导弹的动态品质和命中目标的准确率[1 ] .由于电动舵机伺服系统简单可靠、易于控制且成本较低,对电动舵机伺服系统的研究在军事科技领域引起了许多学者的关注和深入研究[2 -3 ] .随着电力电子技术和交流伺服技术的不断发展,目前电动舵机已经得到了广泛的应用,提高了高性能电动舵机伺服系统研究开发的可能性[4 ] .而电动舵机系统采用电机驱动,不可避免会出现电气故障[5 ] ,电驱动系统中开路故障是最常见的故障类型之一,若发生故障后未采取容错控制策略,将会导致绕组过热、绝缘损坏、转矩降低的一系列问题,甚至会损坏整个系统[6 ⇓ ⇓ -9 ] .因此,目前国内外研究的主要方向之一就是开路故障下多相电机的容错控制策略. ...
1
2021
... 导弹舵机是导弹飞行控制系统的重要组成部分,是导弹方向控制的执行机构.导弹舵机系统是一个高精度的位置伺服系统,导弹能按照一定轨迹在空间中飞行,需要舵机带动并随时校正方向,因此导弹舵机的性能将直接影响导弹的动态品质和命中目标的准确率[1 ] .由于电动舵机伺服系统简单可靠、易于控制且成本较低,对电动舵机伺服系统的研究在军事科技领域引起了许多学者的关注和深入研究[2 -3 ] .随着电力电子技术和交流伺服技术的不断发展,目前电动舵机已经得到了广泛的应用,提高了高性能电动舵机伺服系统研究开发的可能性[4 ] .而电动舵机系统采用电机驱动,不可避免会出现电气故障[5 ] ,电驱动系统中开路故障是最常见的故障类型之一,若发生故障后未采取容错控制策略,将会导致绕组过热、绝缘损坏、转矩降低的一系列问题,甚至会损坏整个系统[6 ⇓ ⇓ -9 ] .因此,目前国内外研究的主要方向之一就是开路故障下多相电机的容错控制策略. ...
1
2021
... 导弹舵机是导弹飞行控制系统的重要组成部分,是导弹方向控制的执行机构.导弹舵机系统是一个高精度的位置伺服系统,导弹能按照一定轨迹在空间中飞行,需要舵机带动并随时校正方向,因此导弹舵机的性能将直接影响导弹的动态品质和命中目标的准确率[1 ] .由于电动舵机伺服系统简单可靠、易于控制且成本较低,对电动舵机伺服系统的研究在军事科技领域引起了许多学者的关注和深入研究[2 -3 ] .随着电力电子技术和交流伺服技术的不断发展,目前电动舵机已经得到了广泛的应用,提高了高性能电动舵机伺服系统研究开发的可能性[4 ] .而电动舵机系统采用电机驱动,不可避免会出现电气故障[5 ] ,电驱动系统中开路故障是最常见的故障类型之一,若发生故障后未采取容错控制策略,将会导致绕组过热、绝缘损坏、转矩降低的一系列问题,甚至会损坏整个系统[6 ⇓ ⇓ -9 ] .因此,目前国内外研究的主要方向之一就是开路故障下多相电机的容错控制策略. ...
1
2021
... 导弹舵机是导弹飞行控制系统的重要组成部分,是导弹方向控制的执行机构.导弹舵机系统是一个高精度的位置伺服系统,导弹能按照一定轨迹在空间中飞行,需要舵机带动并随时校正方向,因此导弹舵机的性能将直接影响导弹的动态品质和命中目标的准确率[1 ] .由于电动舵机伺服系统简单可靠、易于控制且成本较低,对电动舵机伺服系统的研究在军事科技领域引起了许多学者的关注和深入研究[2 -3 ] .随着电力电子技术和交流伺服技术的不断发展,目前电动舵机已经得到了广泛的应用,提高了高性能电动舵机伺服系统研究开发的可能性[4 ] .而电动舵机系统采用电机驱动,不可避免会出现电气故障[5 ] ,电驱动系统中开路故障是最常见的故障类型之一,若发生故障后未采取容错控制策略,将会导致绕组过热、绝缘损坏、转矩降低的一系列问题,甚至会损坏整个系统[6 ⇓ ⇓ -9 ] .因此,目前国内外研究的主要方向之一就是开路故障下多相电机的容错控制策略. ...
1
2021
... 导弹舵机是导弹飞行控制系统的重要组成部分,是导弹方向控制的执行机构.导弹舵机系统是一个高精度的位置伺服系统,导弹能按照一定轨迹在空间中飞行,需要舵机带动并随时校正方向,因此导弹舵机的性能将直接影响导弹的动态品质和命中目标的准确率[1 ] .由于电动舵机伺服系统简单可靠、易于控制且成本较低,对电动舵机伺服系统的研究在军事科技领域引起了许多学者的关注和深入研究[2 -3 ] .随着电力电子技术和交流伺服技术的不断发展,目前电动舵机已经得到了广泛的应用,提高了高性能电动舵机伺服系统研究开发的可能性[4 ] .而电动舵机系统采用电机驱动,不可避免会出现电气故障[5 ] ,电驱动系统中开路故障是最常见的故障类型之一,若发生故障后未采取容错控制策略,将会导致绕组过热、绝缘损坏、转矩降低的一系列问题,甚至会损坏整个系统[6 ⇓ ⇓ -9 ] .因此,目前国内外研究的主要方向之一就是开路故障下多相电机的容错控制策略. ...
Fault-tolerant drive system based on the redundancy bridge arm for aerospace applications
1
2018
... 导弹舵机是导弹飞行控制系统的重要组成部分,是导弹方向控制的执行机构.导弹舵机系统是一个高精度的位置伺服系统,导弹能按照一定轨迹在空间中飞行,需要舵机带动并随时校正方向,因此导弹舵机的性能将直接影响导弹的动态品质和命中目标的准确率[1 ] .由于电动舵机伺服系统简单可靠、易于控制且成本较低,对电动舵机伺服系统的研究在军事科技领域引起了许多学者的关注和深入研究[2 -3 ] .随着电力电子技术和交流伺服技术的不断发展,目前电动舵机已经得到了广泛的应用,提高了高性能电动舵机伺服系统研究开发的可能性[4 ] .而电动舵机系统采用电机驱动,不可避免会出现电气故障[5 ] ,电驱动系统中开路故障是最常见的故障类型之一,若发生故障后未采取容错控制策略,将会导致绕组过热、绝缘损坏、转矩降低的一系列问题,甚至会损坏整个系统[6 ⇓ ⇓ -9 ] .因此,目前国内外研究的主要方向之一就是开路故障下多相电机的容错控制策略. ...
Novel space vector PWM technology with lower common-mode voltage for dual three-phase PMSM
1
2020
... 导弹舵机是导弹飞行控制系统的重要组成部分,是导弹方向控制的执行机构.导弹舵机系统是一个高精度的位置伺服系统,导弹能按照一定轨迹在空间中飞行,需要舵机带动并随时校正方向,因此导弹舵机的性能将直接影响导弹的动态品质和命中目标的准确率[1 ] .由于电动舵机伺服系统简单可靠、易于控制且成本较低,对电动舵机伺服系统的研究在军事科技领域引起了许多学者的关注和深入研究[2 -3 ] .随着电力电子技术和交流伺服技术的不断发展,目前电动舵机已经得到了广泛的应用,提高了高性能电动舵机伺服系统研究开发的可能性[4 ] .而电动舵机系统采用电机驱动,不可避免会出现电气故障[5 ] ,电驱动系统中开路故障是最常见的故障类型之一,若发生故障后未采取容错控制策略,将会导致绕组过热、绝缘损坏、转矩降低的一系列问题,甚至会损坏整个系统[6 ⇓ ⇓ -9 ] .因此,目前国内外研究的主要方向之一就是开路故障下多相电机的容错控制策略. ...
Zero-sequence current based diagnostic method for open-switch fault detection in parallel inverters system
1
2018
... 导弹舵机是导弹飞行控制系统的重要组成部分,是导弹方向控制的执行机构.导弹舵机系统是一个高精度的位置伺服系统,导弹能按照一定轨迹在空间中飞行,需要舵机带动并随时校正方向,因此导弹舵机的性能将直接影响导弹的动态品质和命中目标的准确率[1 ] .由于电动舵机伺服系统简单可靠、易于控制且成本较低,对电动舵机伺服系统的研究在军事科技领域引起了许多学者的关注和深入研究[2 -3 ] .随着电力电子技术和交流伺服技术的不断发展,目前电动舵机已经得到了广泛的应用,提高了高性能电动舵机伺服系统研究开发的可能性[4 ] .而电动舵机系统采用电机驱动,不可避免会出现电气故障[5 ] ,电驱动系统中开路故障是最常见的故障类型之一,若发生故障后未采取容错控制策略,将会导致绕组过热、绝缘损坏、转矩降低的一系列问题,甚至会损坏整个系统[6 ⇓ ⇓ -9 ] .因此,目前国内外研究的主要方向之一就是开路故障下多相电机的容错控制策略. ...
Extension of virtual-signal-injection-based MTPA control for five-phase IPMSM into fault tolerant operation
1
2019
... 导弹舵机是导弹飞行控制系统的重要组成部分,是导弹方向控制的执行机构.导弹舵机系统是一个高精度的位置伺服系统,导弹能按照一定轨迹在空间中飞行,需要舵机带动并随时校正方向,因此导弹舵机的性能将直接影响导弹的动态品质和命中目标的准确率[1 ] .由于电动舵机伺服系统简单可靠、易于控制且成本较低,对电动舵机伺服系统的研究在军事科技领域引起了许多学者的关注和深入研究[2 -3 ] .随着电力电子技术和交流伺服技术的不断发展,目前电动舵机已经得到了广泛的应用,提高了高性能电动舵机伺服系统研究开发的可能性[4 ] .而电动舵机系统采用电机驱动,不可避免会出现电气故障[5 ] ,电驱动系统中开路故障是最常见的故障类型之一,若发生故障后未采取容错控制策略,将会导致绕组过热、绝缘损坏、转矩降低的一系列问题,甚至会损坏整个系统[6 ⇓ ⇓ -9 ] .因此,目前国内外研究的主要方向之一就是开路故障下多相电机的容错控制策略. ...
Fault-tolerant direct thrust force control for a dual inverter fed open-end winding linear vernier permanent-magnet motor using improved SVPWM
1
2018
... 导弹舵机是导弹飞行控制系统的重要组成部分,是导弹方向控制的执行机构.导弹舵机系统是一个高精度的位置伺服系统,导弹能按照一定轨迹在空间中飞行,需要舵机带动并随时校正方向,因此导弹舵机的性能将直接影响导弹的动态品质和命中目标的准确率[1 ] .由于电动舵机伺服系统简单可靠、易于控制且成本较低,对电动舵机伺服系统的研究在军事科技领域引起了许多学者的关注和深入研究[2 -3 ] .随着电力电子技术和交流伺服技术的不断发展,目前电动舵机已经得到了广泛的应用,提高了高性能电动舵机伺服系统研究开发的可能性[4 ] .而电动舵机系统采用电机驱动,不可避免会出现电气故障[5 ] ,电驱动系统中开路故障是最常见的故障类型之一,若发生故障后未采取容错控制策略,将会导致绕组过热、绝缘损坏、转矩降低的一系列问题,甚至会损坏整个系统[6 ⇓ ⇓ -9 ] .因此,目前国内外研究的主要方向之一就是开路故障下多相电机的容错控制策略. ...
1
2022
... 传统电动舵机多采用三相永磁同步电机的三环位置伺服系统[10 ] .而传统三相永磁电机的三相半桥驱动系统在发生缺相故障后无法进行容错运行,在需要可靠性应用的场合,通常采用具备容错能力的三相永磁电机拓扑系统来实现电机的容错运行[11 -12 ] ,但是也会带来体积重量大、系统利用率低以及无法抑制短路电流等问题.而相较于传统的三相永磁电机驱动系统,多相永磁电机驱动系统具有更高的功率密度,高控制自由度和强容错能力等特点[13 -14 ] ,高控制自由度使得电机能够在不增加任何额外硬件措施的情况下实施容错控制,将其应用于导弹舵机系统中可以解决传统三相永磁电机驱动系统在采用容错拓扑时系统结构复杂的问题. ...
1
2022
... 传统电动舵机多采用三相永磁同步电机的三环位置伺服系统[10 ] .而传统三相永磁电机的三相半桥驱动系统在发生缺相故障后无法进行容错运行,在需要可靠性应用的场合,通常采用具备容错能力的三相永磁电机拓扑系统来实现电机的容错运行[11 -12 ] ,但是也会带来体积重量大、系统利用率低以及无法抑制短路电流等问题.而相较于传统的三相永磁电机驱动系统,多相永磁电机驱动系统具有更高的功率密度,高控制自由度和强容错能力等特点[13 -14 ] ,高控制自由度使得电机能够在不增加任何额外硬件措施的情况下实施容错控制,将其应用于导弹舵机系统中可以解决传统三相永磁电机驱动系统在采用容错拓扑时系统结构复杂的问题. ...
基于DFPMM的共母线型双逆变器驱动系统缺任意两相容错运行研究
1
2022
... 传统电动舵机多采用三相永磁同步电机的三环位置伺服系统[10 ] .而传统三相永磁电机的三相半桥驱动系统在发生缺相故障后无法进行容错运行,在需要可靠性应用的场合,通常采用具备容错能力的三相永磁电机拓扑系统来实现电机的容错运行[11 -12 ] ,但是也会带来体积重量大、系统利用率低以及无法抑制短路电流等问题.而相较于传统的三相永磁电机驱动系统,多相永磁电机驱动系统具有更高的功率密度,高控制自由度和强容错能力等特点[13 -14 ] ,高控制自由度使得电机能够在不增加任何额外硬件措施的情况下实施容错控制,将其应用于导弹舵机系统中可以解决传统三相永磁电机驱动系统在采用容错拓扑时系统结构复杂的问题. ...
Research on the fault-tolerant operation without any two-phase in common-bus dual-inverter drive system based on DPFMM
1
2022
... 传统电动舵机多采用三相永磁同步电机的三环位置伺服系统[10 ] .而传统三相永磁电机的三相半桥驱动系统在发生缺相故障后无法进行容错运行,在需要可靠性应用的场合,通常采用具备容错能力的三相永磁电机拓扑系统来实现电机的容错运行[11 -12 ] ,但是也会带来体积重量大、系统利用率低以及无法抑制短路电流等问题.而相较于传统的三相永磁电机驱动系统,多相永磁电机驱动系统具有更高的功率密度,高控制自由度和强容错能力等特点[13 -14 ] ,高控制自由度使得电机能够在不增加任何额外硬件措施的情况下实施容错控制,将其应用于导弹舵机系统中可以解决传统三相永磁电机驱动系统在采用容错拓扑时系统结构复杂的问题. ...
四相电励磁双凸极电动机单相开路故障分析与容错控制策略
1
2016
... 传统电动舵机多采用三相永磁同步电机的三环位置伺服系统[10 ] .而传统三相永磁电机的三相半桥驱动系统在发生缺相故障后无法进行容错运行,在需要可靠性应用的场合,通常采用具备容错能力的三相永磁电机拓扑系统来实现电机的容错运行[11 -12 ] ,但是也会带来体积重量大、系统利用率低以及无法抑制短路电流等问题.而相较于传统的三相永磁电机驱动系统,多相永磁电机驱动系统具有更高的功率密度,高控制自由度和强容错能力等特点[13 -14 ] ,高控制自由度使得电机能够在不增加任何额外硬件措施的情况下实施容错控制,将其应用于导弹舵机系统中可以解决传统三相永磁电机驱动系统在采用容错拓扑时系统结构复杂的问题. ...
Single-phase open-circuit fault analysis and fault-tolerant control strategy for four-phase electrically excited doubly salient motor
1
2016
... 传统电动舵机多采用三相永磁同步电机的三环位置伺服系统[10 ] .而传统三相永磁电机的三相半桥驱动系统在发生缺相故障后无法进行容错运行,在需要可靠性应用的场合,通常采用具备容错能力的三相永磁电机拓扑系统来实现电机的容错运行[11 -12 ] ,但是也会带来体积重量大、系统利用率低以及无法抑制短路电流等问题.而相较于传统的三相永磁电机驱动系统,多相永磁电机驱动系统具有更高的功率密度,高控制自由度和强容错能力等特点[13 -14 ] ,高控制自由度使得电机能够在不增加任何额外硬件措施的情况下实施容错控制,将其应用于导弹舵机系统中可以解决传统三相永磁电机驱动系统在采用容错拓扑时系统结构复杂的问题. ...
非正弦反电势五相永磁同步电机容错矢量控制
1
2021
... 传统电动舵机多采用三相永磁同步电机的三环位置伺服系统[10 ] .而传统三相永磁电机的三相半桥驱动系统在发生缺相故障后无法进行容错运行,在需要可靠性应用的场合,通常采用具备容错能力的三相永磁电机拓扑系统来实现电机的容错运行[11 -12 ] ,但是也会带来体积重量大、系统利用率低以及无法抑制短路电流等问题.而相较于传统的三相永磁电机驱动系统,多相永磁电机驱动系统具有更高的功率密度,高控制自由度和强容错能力等特点[13 -14 ] ,高控制自由度使得电机能够在不增加任何额外硬件措施的情况下实施容错控制,将其应用于导弹舵机系统中可以解决传统三相永磁电机驱动系统在采用容错拓扑时系统结构复杂的问题. ...
Fault-tolerant vector control of five-phase permanent magnet synchronous motor with non-sinusoidal back EMF
1
2021
... 传统电动舵机多采用三相永磁同步电机的三环位置伺服系统[10 ] .而传统三相永磁电机的三相半桥驱动系统在发生缺相故障后无法进行容错运行,在需要可靠性应用的场合,通常采用具备容错能力的三相永磁电机拓扑系统来实现电机的容错运行[11 -12 ] ,但是也会带来体积重量大、系统利用率低以及无法抑制短路电流等问题.而相较于传统的三相永磁电机驱动系统,多相永磁电机驱动系统具有更高的功率密度,高控制自由度和强容错能力等特点[13 -14 ] ,高控制自由度使得电机能够在不增加任何额外硬件措施的情况下实施容错控制,将其应用于导弹舵机系统中可以解决传统三相永磁电机驱动系统在采用容错拓扑时系统结构复杂的问题. ...
船舶电力推进中十五相感应电机同轴运行及容错控制策略
1
2014
... 传统电动舵机多采用三相永磁同步电机的三环位置伺服系统[10 ] .而传统三相永磁电机的三相半桥驱动系统在发生缺相故障后无法进行容错运行,在需要可靠性应用的场合,通常采用具备容错能力的三相永磁电机拓扑系统来实现电机的容错运行[11 -12 ] ,但是也会带来体积重量大、系统利用率低以及无法抑制短路电流等问题.而相较于传统的三相永磁电机驱动系统,多相永磁电机驱动系统具有更高的功率密度,高控制自由度和强容错能力等特点[13 -14 ] ,高控制自由度使得电机能够在不增加任何额外硬件措施的情况下实施容错控制,将其应用于导弹舵机系统中可以解决传统三相永磁电机驱动系统在采用容错拓扑时系统结构复杂的问题. ...
Coaxial operation and fault-tolerant control strategy of fifteen-phase induction motor in marine electric propulsion
1
2014
... 传统电动舵机多采用三相永磁同步电机的三环位置伺服系统[10 ] .而传统三相永磁电机的三相半桥驱动系统在发生缺相故障后无法进行容错运行,在需要可靠性应用的场合,通常采用具备容错能力的三相永磁电机拓扑系统来实现电机的容错运行[11 -12 ] ,但是也会带来体积重量大、系统利用率低以及无法抑制短路电流等问题.而相较于传统的三相永磁电机驱动系统,多相永磁电机驱动系统具有更高的功率密度,高控制自由度和强容错能力等特点[13 -14 ] ,高控制自由度使得电机能够在不增加任何额外硬件措施的情况下实施容错控制,将其应用于导弹舵机系统中可以解决传统三相永磁电机驱动系统在采用容错拓扑时系统结构复杂的问题. ...
1
2021
... 针对多相电机控制策略和容错运行策略的研究,文献[15 ]建立了五相永磁电机开路故障后基波电流平面与三次谐波电流平面的关系,通过离线计算求得了三次谐波平面的扰动系数,通过注入三次谐波的方法减少了故障带来的转矩脉动,并且缩短了运行模式的切换时间,该方法有效地减少了故障带来的转矩脉动.文献[16 ]基于故障前后旋转磁动势不变的原理,重构了剩余自由相电流的幅值和相位,实现电机的容错运行,但由于采用电流滞环控制,存在开关频率不固定和电流波动大的问题.文献[17 ]通过分析不同情况下缺相容错电流的表达式,提出二次旋转变换对电机磁场定向解耦,该算法可以提高电机的容错运行能力,但其计算复杂度高.文献[18 -19 ]基于五相永磁电机提出模型预测电流控制的方法抑制共模电压,并在代价函数中引入了三次谐波电流有效减小了谐波电流占比.文献[20 ]基于五相电机采用模型预测转矩控制实现容错控制,通过查表的方法筛选可以利用的矢量集合,从而减小了遍历次数,简化了运算过程.但现有研究鲜有对多相永磁电机伺服系统的容错性能进行研究,有待于进一步研究多相电机伺服系统的容错控制策略. ...
1
2021
... 针对多相电机控制策略和容错运行策略的研究,文献[15 ]建立了五相永磁电机开路故障后基波电流平面与三次谐波电流平面的关系,通过离线计算求得了三次谐波平面的扰动系数,通过注入三次谐波的方法减少了故障带来的转矩脉动,并且缩短了运行模式的切换时间,该方法有效地减少了故障带来的转矩脉动.文献[16 ]基于故障前后旋转磁动势不变的原理,重构了剩余自由相电流的幅值和相位,实现电机的容错运行,但由于采用电流滞环控制,存在开关频率不固定和电流波动大的问题.文献[17 ]通过分析不同情况下缺相容错电流的表达式,提出二次旋转变换对电机磁场定向解耦,该算法可以提高电机的容错运行能力,但其计算复杂度高.文献[18 -19 ]基于五相永磁电机提出模型预测电流控制的方法抑制共模电压,并在代价函数中引入了三次谐波电流有效减小了谐波电流占比.文献[20 ]基于五相电机采用模型预测转矩控制实现容错控制,通过查表的方法筛选可以利用的矢量集合,从而减小了遍历次数,简化了运算过程.但现有研究鲜有对多相永磁电机伺服系统的容错性能进行研究,有待于进一步研究多相电机伺服系统的容错控制策略. ...
五相容错式磁通切换永磁电机及其控制
1
2015
... 针对多相电机控制策略和容错运行策略的研究,文献[15 ]建立了五相永磁电机开路故障后基波电流平面与三次谐波电流平面的关系,通过离线计算求得了三次谐波平面的扰动系数,通过注入三次谐波的方法减少了故障带来的转矩脉动,并且缩短了运行模式的切换时间,该方法有效地减少了故障带来的转矩脉动.文献[16 ]基于故障前后旋转磁动势不变的原理,重构了剩余自由相电流的幅值和相位,实现电机的容错运行,但由于采用电流滞环控制,存在开关频率不固定和电流波动大的问题.文献[17 ]通过分析不同情况下缺相容错电流的表达式,提出二次旋转变换对电机磁场定向解耦,该算法可以提高电机的容错运行能力,但其计算复杂度高.文献[18 -19 ]基于五相永磁电机提出模型预测电流控制的方法抑制共模电压,并在代价函数中引入了三次谐波电流有效减小了谐波电流占比.文献[20 ]基于五相电机采用模型预测转矩控制实现容错控制,通过查表的方法筛选可以利用的矢量集合,从而减小了遍历次数,简化了运算过程.但现有研究鲜有对多相永磁电机伺服系统的容错性能进行研究,有待于进一步研究多相电机伺服系统的容错控制策略. ...
Five-phase fault-tolerant flux-switched permanent magnet motor and its control
1
2015
... 针对多相电机控制策略和容错运行策略的研究,文献[15 ]建立了五相永磁电机开路故障后基波电流平面与三次谐波电流平面的关系,通过离线计算求得了三次谐波平面的扰动系数,通过注入三次谐波的方法减少了故障带来的转矩脉动,并且缩短了运行模式的切换时间,该方法有效地减少了故障带来的转矩脉动.文献[16 ]基于故障前后旋转磁动势不变的原理,重构了剩余自由相电流的幅值和相位,实现电机的容错运行,但由于采用电流滞环控制,存在开关频率不固定和电流波动大的问题.文献[17 ]通过分析不同情况下缺相容错电流的表达式,提出二次旋转变换对电机磁场定向解耦,该算法可以提高电机的容错运行能力,但其计算复杂度高.文献[18 -19 ]基于五相永磁电机提出模型预测电流控制的方法抑制共模电压,并在代价函数中引入了三次谐波电流有效减小了谐波电流占比.文献[20 ]基于五相电机采用模型预测转矩控制实现容错控制,通过查表的方法筛选可以利用的矢量集合,从而减小了遍历次数,简化了运算过程.但现有研究鲜有对多相永磁电机伺服系统的容错性能进行研究,有待于进一步研究多相电机伺服系统的容错控制策略. ...
五相永磁同步电机缺相运行的建模与控制
1
2016
... 针对多相电机控制策略和容错运行策略的研究,文献[15 ]建立了五相永磁电机开路故障后基波电流平面与三次谐波电流平面的关系,通过离线计算求得了三次谐波平面的扰动系数,通过注入三次谐波的方法减少了故障带来的转矩脉动,并且缩短了运行模式的切换时间,该方法有效地减少了故障带来的转矩脉动.文献[16 ]基于故障前后旋转磁动势不变的原理,重构了剩余自由相电流的幅值和相位,实现电机的容错运行,但由于采用电流滞环控制,存在开关频率不固定和电流波动大的问题.文献[17 ]通过分析不同情况下缺相容错电流的表达式,提出二次旋转变换对电机磁场定向解耦,该算法可以提高电机的容错运行能力,但其计算复杂度高.文献[18 -19 ]基于五相永磁电机提出模型预测电流控制的方法抑制共模电压,并在代价函数中引入了三次谐波电流有效减小了谐波电流占比.文献[20 ]基于五相电机采用模型预测转矩控制实现容错控制,通过查表的方法筛选可以利用的矢量集合,从而减小了遍历次数,简化了运算过程.但现有研究鲜有对多相永磁电机伺服系统的容错性能进行研究,有待于进一步研究多相电机伺服系统的容错控制策略. ...
Modeling and control of five-phase permanent magnet synchronous motor in phase-out operation
1
2016
... 针对多相电机控制策略和容错运行策略的研究,文献[15 ]建立了五相永磁电机开路故障后基波电流平面与三次谐波电流平面的关系,通过离线计算求得了三次谐波平面的扰动系数,通过注入三次谐波的方法减少了故障带来的转矩脉动,并且缩短了运行模式的切换时间,该方法有效地减少了故障带来的转矩脉动.文献[16 ]基于故障前后旋转磁动势不变的原理,重构了剩余自由相电流的幅值和相位,实现电机的容错运行,但由于采用电流滞环控制,存在开关频率不固定和电流波动大的问题.文献[17 ]通过分析不同情况下缺相容错电流的表达式,提出二次旋转变换对电机磁场定向解耦,该算法可以提高电机的容错运行能力,但其计算复杂度高.文献[18 -19 ]基于五相永磁电机提出模型预测电流控制的方法抑制共模电压,并在代价函数中引入了三次谐波电流有效减小了谐波电流占比.文献[20 ]基于五相电机采用模型预测转矩控制实现容错控制,通过查表的方法筛选可以利用的矢量集合,从而减小了遍历次数,简化了运算过程.但现有研究鲜有对多相永磁电机伺服系统的容错性能进行研究,有待于进一步研究多相电机伺服系统的容错控制策略. ...
Virtual voltage vectors based model predictive current control for five-phase vsis with common-mode voltage reduction
1
2021
... 针对多相电机控制策略和容错运行策略的研究,文献[15 ]建立了五相永磁电机开路故障后基波电流平面与三次谐波电流平面的关系,通过离线计算求得了三次谐波平面的扰动系数,通过注入三次谐波的方法减少了故障带来的转矩脉动,并且缩短了运行模式的切换时间,该方法有效地减少了故障带来的转矩脉动.文献[16 ]基于故障前后旋转磁动势不变的原理,重构了剩余自由相电流的幅值和相位,实现电机的容错运行,但由于采用电流滞环控制,存在开关频率不固定和电流波动大的问题.文献[17 ]通过分析不同情况下缺相容错电流的表达式,提出二次旋转变换对电机磁场定向解耦,该算法可以提高电机的容错运行能力,但其计算复杂度高.文献[18 -19 ]基于五相永磁电机提出模型预测电流控制的方法抑制共模电压,并在代价函数中引入了三次谐波电流有效减小了谐波电流占比.文献[20 ]基于五相电机采用模型预测转矩控制实现容错控制,通过查表的方法筛选可以利用的矢量集合,从而减小了遍历次数,简化了运算过程.但现有研究鲜有对多相永磁电机伺服系统的容错性能进行研究,有待于进一步研究多相电机伺服系统的容错控制策略. ...
A virtual voltage vectors based model predictive current control to reduce common-mode voltage for five-phase voltage source inverters
1
2019
... 针对多相电机控制策略和容错运行策略的研究,文献[15 ]建立了五相永磁电机开路故障后基波电流平面与三次谐波电流平面的关系,通过离线计算求得了三次谐波平面的扰动系数,通过注入三次谐波的方法减少了故障带来的转矩脉动,并且缩短了运行模式的切换时间,该方法有效地减少了故障带来的转矩脉动.文献[16 ]基于故障前后旋转磁动势不变的原理,重构了剩余自由相电流的幅值和相位,实现电机的容错运行,但由于采用电流滞环控制,存在开关频率不固定和电流波动大的问题.文献[17 ]通过分析不同情况下缺相容错电流的表达式,提出二次旋转变换对电机磁场定向解耦,该算法可以提高电机的容错运行能力,但其计算复杂度高.文献[18 -19 ]基于五相永磁电机提出模型预测电流控制的方法抑制共模电压,并在代价函数中引入了三次谐波电流有效减小了谐波电流占比.文献[20 ]基于五相电机采用模型预测转矩控制实现容错控制,通过查表的方法筛选可以利用的矢量集合,从而减小了遍历次数,简化了运算过程.但现有研究鲜有对多相永磁电机伺服系统的容错性能进行研究,有待于进一步研究多相电机伺服系统的容错控制策略. ...
基于模型预测转矩控制的五相磁通切换永磁电机开路故障容错策略
1
2019
... 针对多相电机控制策略和容错运行策略的研究,文献[15 ]建立了五相永磁电机开路故障后基波电流平面与三次谐波电流平面的关系,通过离线计算求得了三次谐波平面的扰动系数,通过注入三次谐波的方法减少了故障带来的转矩脉动,并且缩短了运行模式的切换时间,该方法有效地减少了故障带来的转矩脉动.文献[16 ]基于故障前后旋转磁动势不变的原理,重构了剩余自由相电流的幅值和相位,实现电机的容错运行,但由于采用电流滞环控制,存在开关频率不固定和电流波动大的问题.文献[17 ]通过分析不同情况下缺相容错电流的表达式,提出二次旋转变换对电机磁场定向解耦,该算法可以提高电机的容错运行能力,但其计算复杂度高.文献[18 -19 ]基于五相永磁电机提出模型预测电流控制的方法抑制共模电压,并在代价函数中引入了三次谐波电流有效减小了谐波电流占比.文献[20 ]基于五相电机采用模型预测转矩控制实现容错控制,通过查表的方法筛选可以利用的矢量集合,从而减小了遍历次数,简化了运算过程.但现有研究鲜有对多相永磁电机伺服系统的容错性能进行研究,有待于进一步研究多相电机伺服系统的容错控制策略. ...
Open-circuit fault tolerant strategy of five-phase flux-switched permanent magnet motor based on model predictive torque control
1
2019
... 针对多相电机控制策略和容错运行策略的研究,文献[15 ]建立了五相永磁电机开路故障后基波电流平面与三次谐波电流平面的关系,通过离线计算求得了三次谐波平面的扰动系数,通过注入三次谐波的方法减少了故障带来的转矩脉动,并且缩短了运行模式的切换时间,该方法有效地减少了故障带来的转矩脉动.文献[16 ]基于故障前后旋转磁动势不变的原理,重构了剩余自由相电流的幅值和相位,实现电机的容错运行,但由于采用电流滞环控制,存在开关频率不固定和电流波动大的问题.文献[17 ]通过分析不同情况下缺相容错电流的表达式,提出二次旋转变换对电机磁场定向解耦,该算法可以提高电机的容错运行能力,但其计算复杂度高.文献[18 -19 ]基于五相永磁电机提出模型预测电流控制的方法抑制共模电压,并在代价函数中引入了三次谐波电流有效减小了谐波电流占比.文献[20 ]基于五相电机采用模型预测转矩控制实现容错控制,通过查表的方法筛选可以利用的矢量集合,从而减小了遍历次数,简化了运算过程.但现有研究鲜有对多相永磁电机伺服系统的容错性能进行研究,有待于进一步研究多相电机伺服系统的容错控制策略. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}