1 引言
在轨道交通感应电机控制中,采用无速度传感器控制面临带速重投这个难题。比如牵引系统由于短时输出过流、过压保护、过分相或者短时电力中断后重新启动,由于列车是大惯性负载,牵引电机在此中断过程中保持旋转状态,在逆变器重启之后要求电机在较高初始转速条件下投入工作,也就是所谓的带速重投。
有速度传感器下可以实时获取电机转速,带速重投过程相对容易,但是在无速度传感器控制下,如果初始估计转速与实际转速偏差太大,在重投瞬间导致过流以及机械振动从而导致重投失败,因此无速度传感器控制下的带速重投是十分棘手的难题[1 ] 。在逆变器封锁脉冲的过程中,电机的定子电流为零,转子磁链逐渐消失(大约2 s,即几倍转子时间常数的时间),此时电机处于不可观测的状态,因此为了顺利实现带速重投,需要完成对电机初始转速的估算。
目前大部分的研究基于初始速度搜索法,通过调节定子频率以搜索电机转速。文献[2 ]中通过调节定子频率搜索逆变器输入功率最小的工作点以获取初始转速,但是此种方法搜索时间在1.5 s左右,导致重投的时间较长。文献[3 ]尝试搜索定子电流幅值最小工作点,尽管控制相对简单并且容易实现,但是也需要至少1 s的搜索时间。文献[4 ]则提出将转矩指令设定为零,通过调节同步频率使得反馈转矩为零获得电机转速,大约需要1.2 s的搜索时间。西门子的变频器使用手册中提到了一种转子频率搜索的方法[5 ] ,在搜索的过程中始终保持定子电流为恒定电流,通过将逆变器输出电压和V /f 曲线上的电压进行比较,在两者相等的点处获取转子频率,但是恒电流的控制会导致较大的输出转矩。国内中车株洲电力机车研究所尚敬等[6 ⇓ -8 ] 提出了一种适用于大功率电力机车的带速重投方法,主要利用同一定子电压矢量作用下定子电流矢量的空间Heyland圆的原理[9 ] ,根据实际转速与估计转速的偏差方向与电流矢量偏差方向相关的原理对转速进行查找,采用这种折半查找的方法搜索时间相对较长,并且需要对整个过程中磁链进行控制确保电流处于可控范围内[10 ] 。日本学者KONDO[11 ] 提出了一种基于转子反电势的带速重投方法,基于反电势的速度计算法主要依据当估算转速收敛到实际转速时,d 轴转子反电势为零的原理进行初始转速的搜索,或者基于稳定条件下的反电势公式直接计算转速[12 ] ,但是此类方法在低速的效果相对较差,这是由于低速的反电势相对较低并且转速估算受定子电阻变化的影响相对较大。
此外还有一些其他的带速重投方法,文献[13 ]中在短时电力中断后利用一个状态观测器完成对电机转速的估算,但是在转子磁链逐渐减小到零后此种方法将会失效,此时也就无法继续获取转速信息。文献[14 ]中则利用感应电机的阻抗特性将电机与逆变器组成振荡器,从而从振荡的电流中获取旋转电机转速信息,但会产生较大的转矩振荡;还有采用模糊控制进行初始转速辨识[15 ] ,其仅仅应用于小功率的恒压频比控制的变频器中;也有利用高频信号注入获取电机转速的方法[16 ] ,通过单相高频注入检测高频环流的大小获取转速,其对电流采样以及信号处理要求较高;此外有学者对带速重投过程中的稳定性进行了理论分析,并对转速观测的收敛域进行了分类;还有将模型预测控制应用于无速度传感器控制并研究其带速重投下的转速辨识性能[17 ] ,以及将积分滑模算法应用于带速重投中的转速辨识[18 ] 。在轨道交通领域,有学者尝试利用列车网络信号获取电机转速[19 ] ,此方法在列车紧急牵引等没有列车网络的情况下将会失效。文献[20 ]中为了避免列车惰行封锁脉冲后带速重投的问题,采用再生制动工况代替惰行工况,此方法仅针对特定车型适用。
为了解决无速度传感器控制下带速重投问题,本文首先分析了感应电机在自由旋转状态下的特点,建立单电流闭环直流注入状态的数学模型,分析了运用此方法进行初始转速辨识的工作原理,通过仿真对不同速度下单电流闭环直流注入法带速重投策略进行了验证。结果表明,本文的带速重投策略能够快速实现无速度传感器控制下感应电机的平滑启动。
2 单电流闭环直流注入带速重投方法
2.1 感应电机自由旋转时的特性
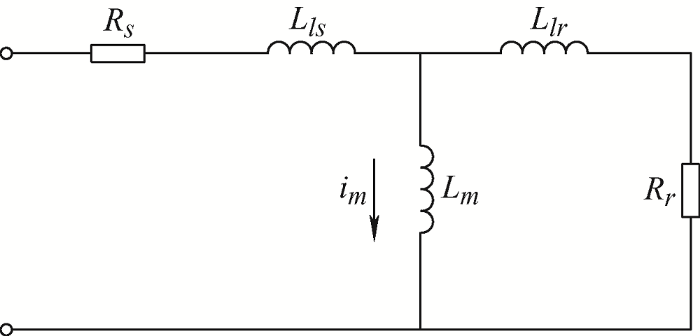
对于旋转中的感应电机,在逆变器停止供电后处于自由旋转的状态。由于感应电机的转子磁链是依靠定子输入的电压感应产生,在逆变器输出电压为零的情况下将会导致转子磁链逐渐减小。在此种情况下的转差率为1,所以得到自由旋转状态下的感应电机的等效电路如图1 所示。
图1
针对自由旋转的电机,由于此时逆变器的6个开关管处于关闭状态,在电机的定子上不会有电流产生,在转子旋转的时候会有感应电压的产生表现为定子侧的端子电压。由于转子侧发生短路,在互感上储蓄的能量会因为转子电阻上流动的电流转换为铜损而被消耗掉,导致转子磁通会随着时间的推移而逐渐减小。
假设在逆变器停止供电之前,励磁支路电流为 ${{i}_{m}}$
(1) ${{L}_{r}}\frac{d{{i}_{m}}}{dt}+{{R}_{r}}{{i}_{m}}=0$
其中,${{L}_{r}}={{L}_{m}}+{{L}_{lr}}$ ${{i}_{m}}$
(2) ${{i}_{m}}={{i}_{m0}}\exp (-t/{{\tau }_{r}})$
式中,${{i}_{m0}}$ ${{\tau }_{r}}$
2.2 电流直流注入建模
停止对感应电机供电后,在经过了一定时间的情况下,自由运转的感应电机的残留电压几乎为零,此时无法判断电机的旋转速度。因此,本文提出通过对旋转电机施加直流电流注入的方法,从而推断出感应电机的速度。
首先,如果给自由旋转的感应电机施加直流电压,就会有定子电流产生。该定子电流就会产生一次磁通。如果电机处于旋转的状态,一次磁通产生的磁场会与转子导条发生交链,故根据右手定则会产生电动势。该电动势的大小和频率由一次磁通的大小以及转子的转速决定。由于感应电机转子导条会发生短路,此时由该电动势产生的短路电流会在转子导条流动,从而会产生二次磁通。用于消除此二次磁通的成分电流会在定子电流上流动。于是通过检测受转速影响的定子电流或者通过检测转子磁链的信息可以获得自由运转中的感应电机速度。
基于单电流闭环直流注入的方法就是通过设定逆变器的同步频率为零,将电流解耦角也设为零,通过给定d 轴电流指令值,并将q 轴电压指令值设为零,此时仅仅对d 轴电流进行闭环控制,q 轴电流处于不控的状态。感应电机在旋转的情况下,转子会产生反电势,从而进一步影响定子q 轴电流。在此情况下设定${{u}_{s\beta }}=0$
(3) $\left\{ \begin{align} & \frac{d}{dt}{{i}_{s\beta }}=\frac{L_{r}^{2}{{R}_{s}}+L_{m}^{2}{{R}_{r}}}{{{L}_{r}}(L_{m}^{2}-{{L}_{s}}{{L}_{r}})}{{i}_{s\beta }}+\frac{{{L}_{m}}{{\omega }_{r}}}{(L_{m}^{2}-{{L}_{s}}{{L}_{r}})}{{\psi }_{r\alpha }}+ \\ & \text{ }\frac{-{{L}_{m}}{{R}_{r}}}{{{L}_{r}}(L_{m}^{2}-{{L}_{s}}{{L}_{r}})}{{\psi }_{r\beta }} \\ & \frac{d}{dt}{{\psi }_{r\alpha }}=\frac{{{L}_{m}}{{R}_{r}}}{{{L}_{r}}}{{i}_{s\alpha }}-\frac{{{R}_{r}}}{{{L}_{r}}}{{\psi }_{r\alpha }}-{{\omega }_{r}}{{\psi }_{r\beta }} \\ & \frac{d}{dt}{{\psi }_{r\beta }}=\frac{{{L}_{m}}{{R}_{r}}}{{{L}_{r}}}{{i}_{s\beta }}+{{\omega }_{r}}{{\psi }_{r\alpha }}-\frac{{{R}_{r}}}{{{L}_{r}}}{{\psi }_{r\beta }} \\ \end{align} \right.$
式中,${{R}_{s}}$ ${{R}_{r}}$ ${{L}_{s}}$ ${{L}_{r}}$ ${{L}_{m}}$ ${{\psi }_{r\alpha }}$ ${{\psi }_{r\beta }}$ α 轴、β 轴分量;${{u}_{s\alpha }}$ ${{u}_{s\beta }}$ α 轴、β 轴分量;${{i}_{s\alpha }}$ ${{i}_{s\beta }}$ α 轴、β 轴分量;${{\omega }_{r}}$
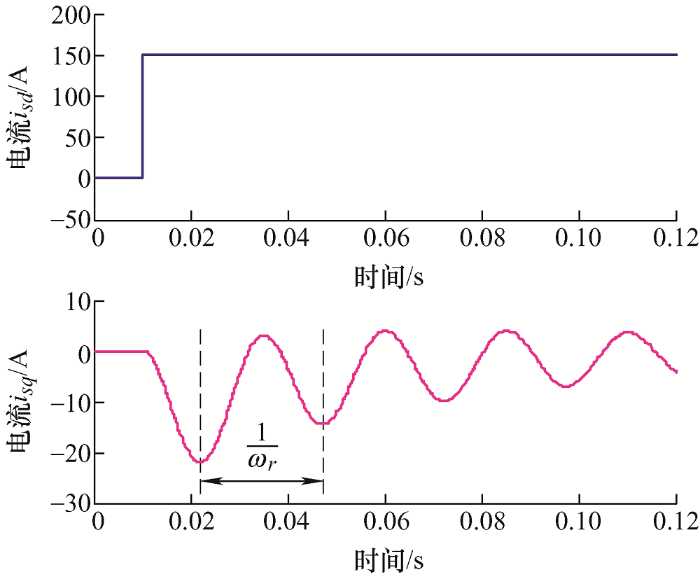
由于${{i}_{s\alpha }}$ ${{i}_{s\beta }}$ ${{i}_{s\beta }}$ d 轴电流设置为 ${{i}_{s\alpha }}=150$ ${{\psi }_{r\alpha }}$ ${{\psi }_{r\beta }}$ ${{i}_{s\alpha }}={{i}_{sd}}$ ${{i}_{s\beta }}={{i}_{sq}}$ d 轴与q 轴电流波形如图2 所示。
图2
图2
单电流闭环直流电流注入情况下d 轴与q 轴电流波形
从图2 中可以看出,q 轴电流的波动受实际转速的影响,通过测量${{i}_{sq}}$ ${{\hat{\omega }}_{r}}$
2.3 初始转速估算
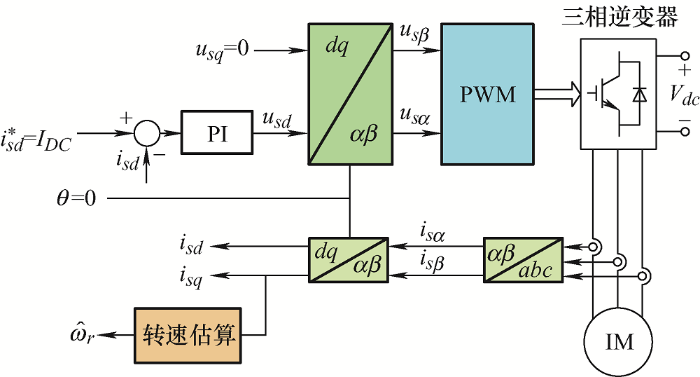
通过修改现有的矢量控制逻辑,将q 轴给定电压设置为零,通过对d 轴电流的闭环PI调节计算出d 轴给定电压。检测反馈的电流,通过测量表现为正弦波状的q 轴电流检测值${{i}_{sq}}$
将上述利用单电流闭环直流注入方法的控制框图总结如图3 所示。
图3
图3
单电流闭环直流电流注入辨识初始转速的控制框图
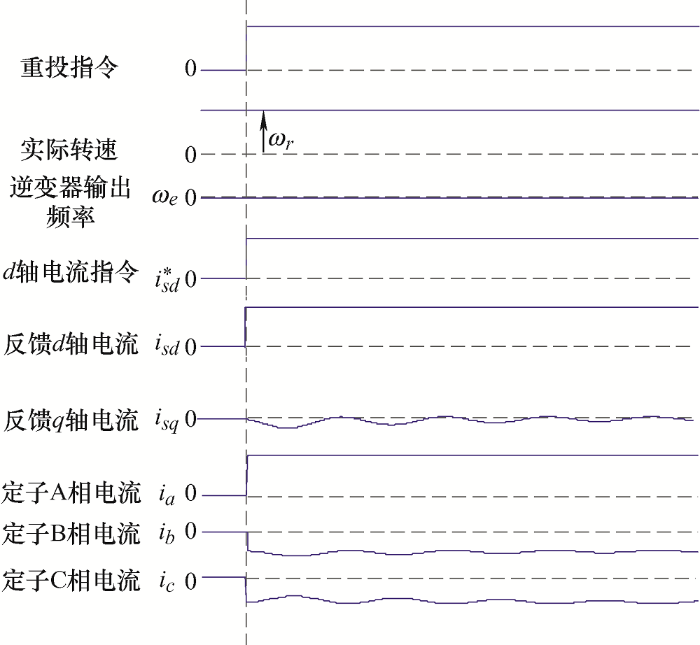
进一步以实际的应用作为例子进行分析,图4 是对旋转电机进行单电流闭环直流注入的时序图。在实际电机旋转的情况下(其转速为${{\omega }_{r}}$ ) ,逆变器收到重投指令,此时逆变器将输出角频率设置为零,同步旋转角将保持为零,同时将q 轴电压设为零,只对d 轴电流进行闭环调节。从图4 可以看出,在单电流闭环调节的情况下,定子A相电流保持为直流,而定子B相电流与C相电流则受转子感应磁链的影响进行一定的波动,导致合成后的反馈q 轴电流也呈现随转速周期波动的现象,其中q 轴电流波动包含一定的直流偏置并且波动的幅值在逐渐减小。通过计算第一个与第二个极小值之间的时间从而确定波动的周期,取其倒数就可以计算得到估计转速${{\hat{\omega }}_{r}}$
图4
3 带速重投模式切换策略
3.1 全阶转速估算
根据单电流闭环直流注入获取带速重投时刻的初始转速后,后面需要采用正常的无速度传感器控制策略,本文采用全阶转速估算方法。
在由全阶磁链观测器构成的模型参考自适应系统中,感应电机作为参考模型,观测器作为可调模型。在两相静止坐标系下,感应电机的数学模型可以由以下的矩阵形式来表示
(4) $\frac{d}{dt}X=AX\mathbf{+}B{{V}_{s}}$
式中,状态变量$X={{[{{i}_{s\alpha }}\text{ }{{i}_{s\beta }}\text{ }{{\psi }_{r\alpha }}\text{ }{{\psi }_{r\beta }}]}^{T}}$ ${{V}_{s}}={{[{{u}_{s\alpha }}\text{ }{{u}_{s\beta }}]}^{T}}$ A B
(5) $\frac{d}{dt}\left[ \begin{matrix} {{i}_{s}} \\ {{\psi }_{r}} \\ \end{matrix} \right]=\left[ \begin{matrix} {{A}_{\text{11}}} & {{A}_{\text{12}}} \\ {{A}_{\text{21}}} & {{A}_{\text{22}}} \\\end{matrix} \right]\left[ \begin{matrix} {{i}_{s}} \\ {{\psi }_{r}} \\\end{matrix} \right]+\left[ \begin{matrix} {{B}_{\text{1}}} \\ 0 \\\end{matrix} \right]{{V}_{s}}$
${{i}_{s}}={{[\begin{matrix} {{i}_{s\alpha }} & {{i}_{s\beta }} \\ \end{matrix}]}^{T}}\ \ \ \ \ {{\psi }_{r}}={{[\begin{matrix} {{\psi }_{r\alpha }} & {{\psi }_{r\beta }} \\ \end{matrix}]}^{T}}$
${{B}_{\text{1}}}\text{=}{{b}_{s1}}I=I\text{/(}\sigma {{L}_{s}}\text{)}\ \ \ \ \ \ {{A}_{11}}={{a}_{r11}}I$
${{A}_{12}}={{a}_{r12}}I\text{+}{{a}_{i12}}J\ \ \ \ \ \ {{A}_{21}}={{a}_{r21}}I\text{ }$
${{A}_{22}}={{a}_{r22}}I\text{+}{{a}_{i22}}J$
${{a}_{r11}}\text{=}-\text{ }\!\![\!\!\text{ 1/(}\sigma {{\tau }_{s}}\text{)+(1}-\sigma \text{)/(}\sigma {{\tau }_{r}}\text{) }\!\!]\!\!\text{ }$
${{a}_{r12}}\text{=}-1/\rho (1/{{\tau }_{r}})$ ${{a}_{i12}}={{\omega }_{r}}/\rho $
${{a}_{r21}}={{L}_{m}}/{{\tau }_{r}}$ ${{a}_{r22}}=-1/{{\tau }_{r}}=\rho {{a}_{r12}}$
${{a}_{i22}}={{\omega }_{r}}=\rho {{a}_{i12}}$
${{\tau }_{s}}={{L}_{s}}/{{R}_{s}}\ \ \ \ \ {{\tau }_{r}}={{L}_{r}}/{{R}_{r}}\ \ \ \ \ \rho =-(\sigma {{L}_{s}}{{L}_{r}})/{{L}_{m}}$ ${{L}_{s}}={{L}_{m}}+{{L}_{ls}}\ \ \ \ \ {{L}_{r}}={{L}_{m}}+{{L}_{lr}}$
$I\text{=}\left[ \begin{matrix} 1 & 0 \\ 0 & 1 \\\end{matrix} \right]\ \ \ \ \ \ J\text{=}\left[ \begin{matrix} 0 & -1 \\ 1 & 0 \\ \end{matrix} \right]$
式中,${{L}_{ls}}$ ${{L}_{lr}}$ $\sigma =1-L_{m}^{2}/({{L}_{s}}{{L}_{r}})$
(6) $\frac{d}{dt}(\hat{X})=\hat{A}\hat{X}+B{{V}_{s}}+G({{\hat{i}}_{s}}-{{i}_{s}})$
式中,$\hat{A}$ $G$
$\frac{d}{dt}\left[ \begin{matrix} {{{\hat{i}}}_{s}} \\ {{{\hat{\psi }}}_{r}} \\\end{matrix} \right]\text{=}\left[ \begin{matrix} ({{a}_{r11}}\text{+}{{g}_{1}}\text{)}I\text{+}{{g}_{2}}J & {{a}_{r12}}I\text{+}{{{\hat{\omega }}}_{r}}/\rho J \\ ({{a}_{r21}}\text{+}{{g}_{3}}\text{)}I\text{+}{{g}_{4}}J & {{a}_{r22}}I\text{+}{{{\hat{\omega }}}_{r}}J \\\end{matrix} \right]\left[ \begin{matrix} {{{\hat{i}}}_{s}} \\ {{{\hat{\psi }}}_{r}} \\\end{matrix} \right]+$
(7) $\left[ \begin{matrix} {{b}_{s\text{1}}}I \\ 0 \\\end{matrix} \right]{{V}_{s}}-\left[ \begin{matrix} {{g}_{1}}I\text{+}{{g}_{2}}J \\ {{g}_{3}}I\text{+}{{g}_{4}}J \\\end{matrix} \right]{{i}_{s}}$
为了保证观测器的稳定性与动态响应速度,将观测器的极点配置成参考电机极点的k 倍,可将反馈增益矩阵设计为
(8) $G\text{=}\left[ \begin{matrix} {{g}_{1}}I\text{+}{{g}_{2}}J \\ {{g}_{3}}I\text{+}{{g}_{4}}J \\\end{matrix} \right]$
$\left\{ \begin{align} & {{g}_{1}}=(k-1)({{a}_{r11}}+{{a}_{r22}}) \\ & {{g}_{2}}=(k-1){{a}_{i22}} \\ & {{g}_{3}}=({{k}^{2}}-1)({{a}_{r21}}-\rho {{a}_{r11}})+\rho {{g}_{1}} \\ & {{g}_{4}}=\rho {{g}_{2}} \\ \end{align} \right.$
为了保证观测器足够的收敛速度以及抗干扰性能,k 取为1.25。
下面根据李雅普诺夫稳定定理设计转速自适应律。将电机状态方程式(4)与观测器状态方程式(7)相减得到定子电流与转子磁链的误差可表示为
(9) $\frac{d}{dt}e=(A+GC)e-\Delta A\hat{X}$
$\Delta A=\hat{A}-A=\left[ \begin{matrix} 0 & 0 & 0 & \frac{{{L}_{m}}\Delta {{\omega }_{r}}}{L_{m}^{2}-{{L}_{s}}{{L}_{r}}} \\ 0 & 0 & \frac{-{{L}_{m}}\Delta {{\omega }_{r}}}{L_{m}^{2}-{{L}_{s}}{{L}_{r}}} & 0 \\ 0 & 0 & 0 & \Delta {{\omega }_{r}} \\ 0 & 0 & -\Delta {{\omega }_{r}} & 0 \\\end{matrix} \right]$
$C=\left[ \begin{matrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\\end{matrix} \right]$ $e=X-\hat{X}\ \ \ \ \ \Delta {{\omega }_{r}}={{\omega }_{r}}-{{\hat{\omega }}_{r}}$
(10) $V={{e}^{T}}e+\frac{{{({{{\hat{\omega }}}_{r}}-{{\omega }_{r}})}^{2}}}{\lambda }$
式中,λ 是一个正常数。由于真实转子磁链信息无法测得,因此忽略转子磁链的误差项从而得到如下公式
(11) $\begin{matrix} \frac{dV}{dt}={{e}^{T}}[{{(A+GC)}^{T}}+(A+GC)]e+ \\ 2\Delta {{\omega }_{r}}({{e}_{is\alpha }}{{{\hat{\psi }}}_{r\beta }}-{{e}_{is\beta }}{{{\hat{\psi }}}_{r\alpha }})\frac{{{L}_{m}}}{{{L}_{s}}{{L}_{r}}-L_{m}^{2}}-\frac{2\Delta {{\omega }_{r}}}{\lambda }\frac{d{{{\hat{\omega }}}_{r}}}{dt} \\ \end{matrix}$
式中,电流误差定义为${{e}_{is\alpha }}={{i}_{s\alpha }}-{{\hat{i}}_{s\alpha }}\ \text{ }{{e}_{is\beta }}={{i}_{s\beta }}-{{\hat{i}}_{s\beta }}$
从式(9)可知,为了保证状态观测器的稳定性,矩阵$(A+GC)$ $[{{(A+GC)}^{T}}+(A+GC)]$ ${{e}^{T}}[{{(A+GC)}^{T}}+(A+GC)]e$ G
为了获得估计转速,令式(11)的第二项与第三项之和为零,从而获得以下转速自适应律
(12) $\frac{d{{{\hat{\omega }}}_{r}}}{dt}=\lambda ({{e}_{is\alpha }}{{\hat{\psi }}_{r\beta }}-{{e}_{is\beta }}{{\hat{\psi }}_{r\alpha }})\frac{{{L}_{m}}}{{{L}_{s}}{{L}_{r}}-L_{m}^{2}}$
此外,为了提高转速自适应律的动态响应能力,将PI调节替代纯积分调节从而获得修改后的转速自适应律为
(13) ${{\hat{\omega }}_{r}}={{k}_{p}}({{e}_{is\alpha }}{{\hat{\psi }}_{r\beta }}-{{e}_{is\beta }}{{\hat{\psi }}_{r\alpha }})+{{k}_{i}}\int{({{e}_{is\alpha }}{{{\hat{\psi }}}_{r\beta }}-{{e}_{is\beta }}{{{\hat{\psi }}}_{r\alpha }})}dt$
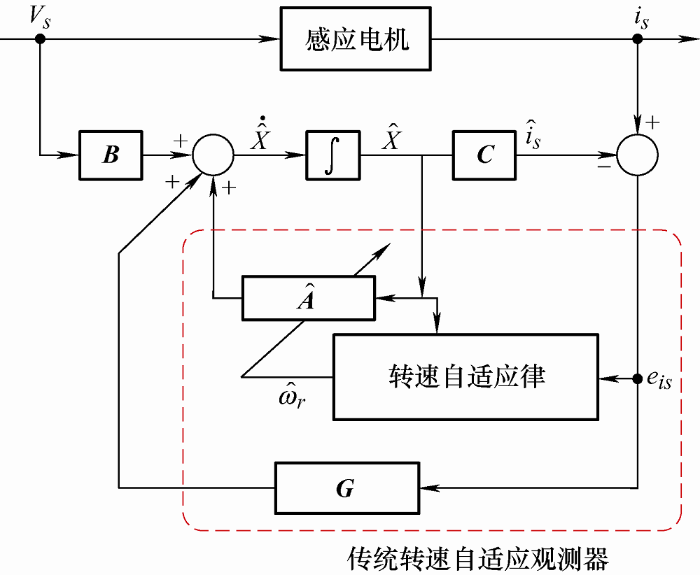
至此,基于全阶观测器的转速自适应律框图如图5 所示,首先通过转速自适应律式(13)获得估计转速,再将其代入全阶自适应观测器式(6)调节状态矩阵,同时反馈增益矩阵G
图5
3.2 模式切换策略
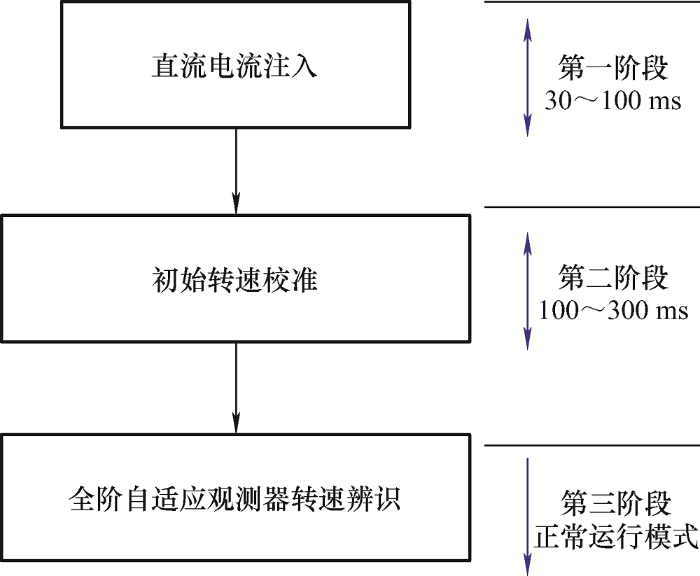
采用单电流闭环直流注入法作为带速重投第一阶段的转速辨识方法。将第一阶段的结果作为第二阶段的初始转速,在第二阶段采用设定转矩为零的转速调节过程,进一步提高初始转速估算的精度,最终在第三阶段采用全阶自适应观测器完成对转速的估算,整个带速重投方案的框图总结如图6 所示。
图6
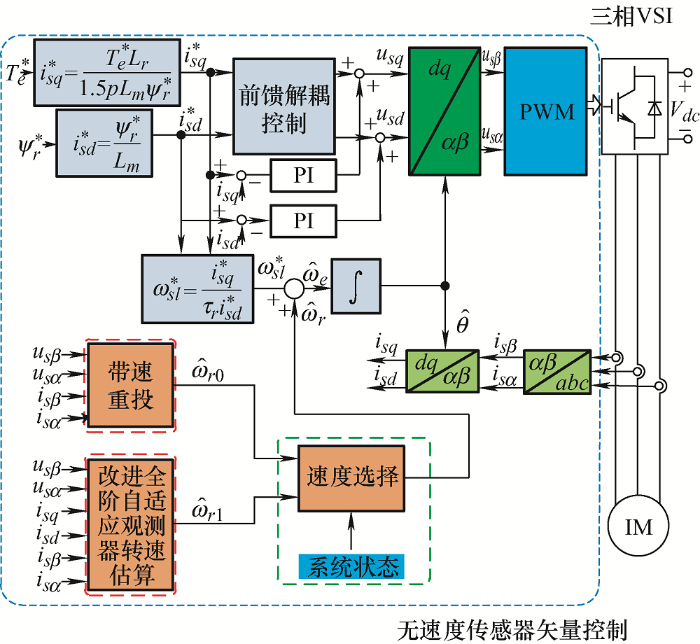
在第一阶段设定同步角频率${{\hat{\omega }}_{e}}$ ${{\hat{\omega }}_{r0}}$ ${{\hat{\omega }}_{r1}}$ 图7 所示。
图7
图7
基于三阶段的感应电机无速度传感器矢量控制框图
4 仿真结果分析
基于180 kW牵引感应电机,搭建离线仿真模型对带速重投策略进行验证,对基于单电流闭环直流注入法的初始转速辨识算法进行验证,同时对基于三阶段的带速重投策略进行验证。
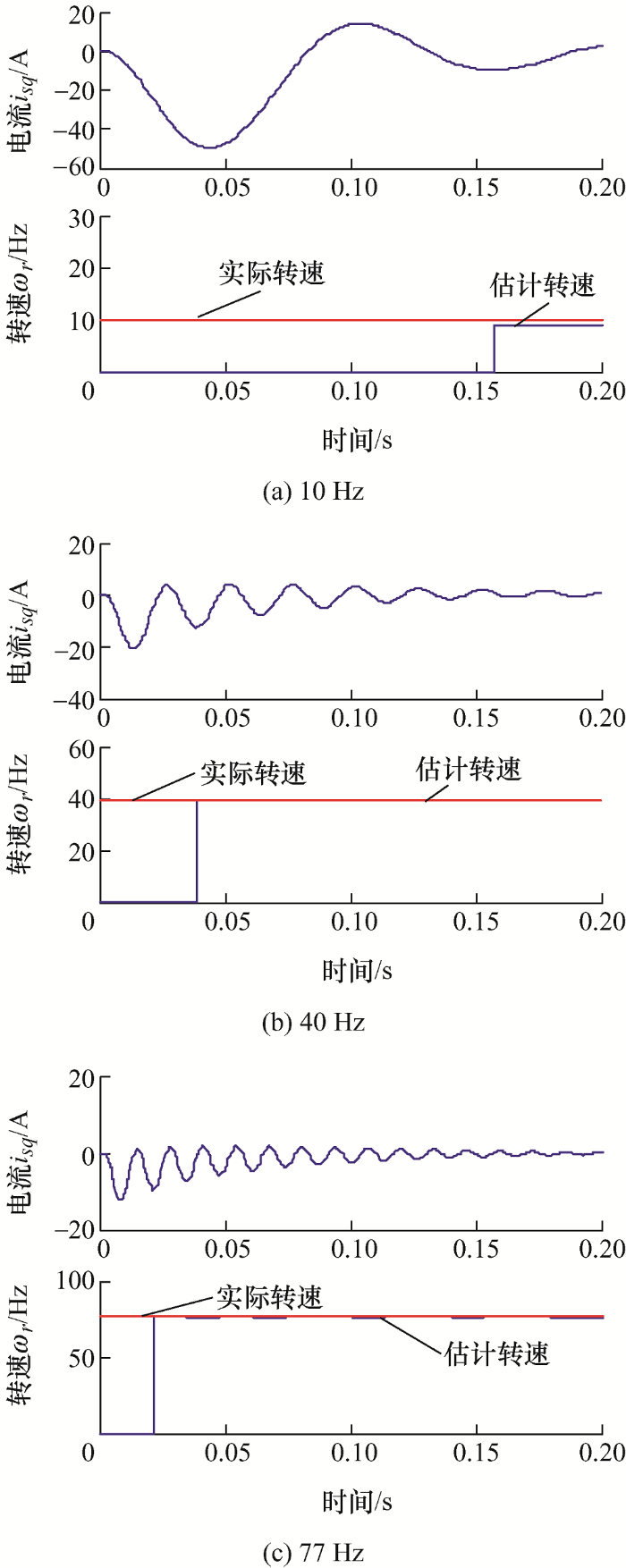
首先,采用对基于单电流闭环直流注入的带速重投进行仿真验证。此模式下仅仅对d 轴电流进行闭环控制,通过检测q 轴电流每两个极小值之间的周期值进一步计算初始转速。将感应电机模型设置为转速模式并将其转速设定为300 r/min(电角频率为10 Hz)以验证在此转速下带速重投的效果,其仿真结果如图8 a所示。其中在isp 第二次到达极小值时首次计算出估算转速,大约在160 ms处得出初始转速的结果。
图8
图8
单电流闭环直流注入第一阶段不同速度下仿真结果
进一步提高初始转速到40 Hz,仿真结果如图8 b所示,此时估算时间相对有所减小。进一步验证高速时候的初始转速观测结果,在感应电机转速为77 Hz的情况下的仿真结果如图8 c所示。为了验证基于单电流闭环直流注入情况下各个速度等级的初始转速估算误差,将从10~160 Hz范围内的转速观测误差总结如表1 所示。
从表1 可以发现,采用单电流闭环直流注入的观测转速在高速时有比较大的观测误差。这是由于控制器的控制频率相对较低(2 kHz),在高速时候通过计数方法获取的周期值与实际值偏差较大,从而导致转速计算偏差较大。另外在低速区域,随着转速的进一步降低,获取初始转速的时间会变长。
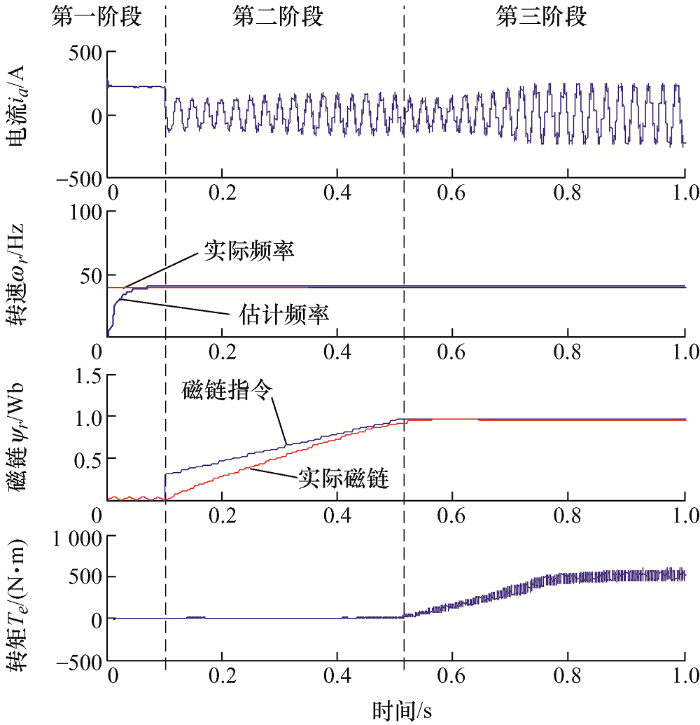
在完成对初始转速辨识的仿真验证后,下面对整个带速重投过程的可行性进行验证。其中第一阶段采用单电流闭环直流注入,第二阶段采用转矩修正以及第三阶段采用全阶自适应转速估算,整个带速重投仿真结果如图9 所示,其中4个子窗口分别为三个阶段的定子A相电流、估计转速与实际转速波形、转子磁链幅值波形以及电磁转矩波形。
图9
在第一阶段向旋转电机注入直流,通过单电流闭环方法获取电机的初始转速。在第二阶段,将磁链指令值逐渐增加到额定值,同时将转矩指令值设置为0。通过转矩闭环控制,估计的转速被进一步校准,从而更加精准地收敛到实际转速。将第二阶段的转速观测结果直接传递到第三阶段作为其初始值,同时在第三阶段采用全阶磁链观测器进行转速观测。由于转子磁链已经恢复到额定值,电机进入正常无速度传感器运行模式,同时开始输出电磁转矩。
在整个带速重投过程中,没有过流故障发生,电磁转矩逐渐上升到目标转矩(500 N·m)。此仿真证明了感应电机从电力中断过程中顺利恢复并投入正常运行状态。在轨道交通应用中,当列车进入过分相区接触网供电中断时,此时逆变器停止工作同时电机仍在旋转,当列车运行出分相区后恢复供电,采用本文的带速重投方法顺利使得无速度传感器控制下牵引电机恢复工作,提高了列车的运行稳定性。
5 结论
采用一种单电流闭环直流注入的方法快速获取断电情况下自由旋转感应电机的初始转速,从而实现无速度传感器控制下感应电机的平滑带速重投。
(1) 研究了自由旋转感应电机在断电状态下的特性,并建立了仅有d 轴电流闭环控制下的数学模型,设计了基于三阶段的平滑带速重投策略。
(2) 在单电流闭环直流注入模式下,通过测量q 轴电流波动周期快速获取初始转速,进一步通过转矩为零修正提高精度并建立励磁,最后切换到全阶转速估算的正常无速度传感器控制。
(3) 本文的带速重投策略能够实现无速度传感器控制下感应电机的快速平滑带速重投,仿真结果证实了所提方法的有效性。
参考文献
View Option
[1]
丁荣军 , 桂卫华 . 无速度传感器控制技术及其在大功率牵引传动中的应用研究
[J]. 铁道学报 , 2008 , 30 (1 ):75 -81 .
[本文引用: 1]
DING Rongjun GUI Weihua . Research of speed sensorless control technology and its application in high power AC traction drive
[J]. Journal of the China Railway Society , 2008 , 30 (1 ):75 -81 .
[本文引用: 1]
[2]
LEE K AHMED S LUKIC S M . Universal restart strategy for scalar (V/f) controlled induction machines
[J]. IEEE Transactions on Industry Applications , 2017 , 53 (6 ):5489 -5495 .
DOI:10.1109/TIA.2017.2733497
URL
[本文引用: 1]
[3]
PAN H SPRINGOB L HOLTZ J . Improving the start and restart behavior through state recognition of AC drives [C]//Proceedings of Power Conversion Conference-PCC'97. IEEE, 1997 , 2 :589 -594 .
[本文引用: 1]
[4]
廖永衡 . 电力牵引传动系统直接转矩控制若干关键问题研究 [D]. 成都 : 西南交通大学 , 2013 .
[本文引用: 1]
LIAO Yongheng . Research on key problems of direct torque in electric traction system [D]. Chengdu : Southwest Jiaotong University , 2013 .
[本文引用: 1]
[5]
赵文才 , 金富宽 , 王傲能 , 等 . 一种异步电机再启动时转速估算方法
[J]. 电气传动 , 2012 (9 ):11 -15 .
[本文引用: 1]
ZHAO Wencai JIN Fukuan WANG Aoneng , et al . Speed estimation method for asynchronous motor restart
[J]. Electric Drive , 2012 (9 ):11 -15 .
[本文引用: 1]
[6]
尚敬 , 刘可安 , 年晓红 , 等 . 牵引电动机无速度传感器及带速度重投控制
[J]. 中国电机工程学报 , 2006 , 26 (15 ):118 -123 .
[本文引用: 1]
SHANG Jing LIU Kean NIAN Xiaohong , et al . Speed sensorless control and restarting at unknown speed of traction motor
[J]. Proceedings of the CSEE , 2006 , 26 (15 ):118 -123 .
[本文引用: 1]
[7]
尚敬 , 刘可安 . 电力牵引异步电动机无速度传感器间接定子量控制
[J]. 电工技术学报 , 2007 , 22 (2 ):22 -27 .
[本文引用: 1]
SHANG Jing LIU Kean . Speed sensorless indirect stator-quantities control of induction motor in electric traction
[J]. Transactions of China Electrotechnical Society , 2007 , 22 (2 ):22 -27 .
[本文引用: 1]
[8]
丁荣军 , 桂卫华 , 尚敬 . 感应电机无速度传感器控制带速重投研究
[J]. 机车电传动 , 2008 (3 ):12 -14 .
[本文引用: 1]
DING Rongjun GUI Weihua SHANG Jing . Study on restarting at unknown speed with speed-sensorless contorl of induction motor
[J]. Electric Drive for Locomotives , 2008 (3 ):12 -14 .
[本文引用: 1]
[9]
HOFFMANN F KOCH S . Steady state analysis of speed sensorless control of induction machines [C]//IECON'98. Proceedings of the 24th Annual Conference of the IEEE Industrial Electronics Society (Cat. No. 98CH36200). IEEE, 1998 , 3 :1626 -1631 .
[本文引用: 1]
[10]
曹霄 . 无速度传感器异步电动机直接转矩控制系统带速度重投控制的研究 [D]. 长沙 : 中南大学 , 2007 .
[本文引用: 1]
CAO Xiao . Research on direct torque control system with restarting control for sensorless induction motor [D]. Changsha : Centrol South university , 2007 .
[本文引用: 1]
[11]
KONDO K . Re-stating technologies for rotational sensorless controlled AC motors at the rotating status [C]//2015 10th Asian Control Conference (ASCC). IEEE, 2015 :1 -6 .
[本文引用: 1]
[12]
KONDO K YUKI K . An application of the induction motor speed sensor less control to railway vehicle traction system [C]//Conference Record of the 2002 IEEE Industry Applications Conference. 37th IAS Annual Meeting (Cat. No. 02CH37344). IEEE, 2002 , 3 :2022 -2027 .
[本文引用: 1]
[13]
KIM S H PAR H K YOO A , et al . Soft-restarting of free-run induction motors driven by small DC-link capacitor inverters [C]//2015 IEEE Energy Conversion Congress and Exposition (ECCE). IEEE, 2015 :4441 -4446 .
[本文引用: 1]
[14]
曾令全 , 王志霞 , 刘耀年 . 异步电动机无速度传感器再起动方法的研究
[J]. 电工技术学报 , 2003 , 18 (2 ):9 -12 .
[本文引用: 1]
ZENG Lingquan WANG Zhixia LIU Yaonian . Research of speed sensorless restart method for asynchronous motor drive system
[J]. Transactions of China Electrotechnical Society , 2003 , 18 (2 ):9 -12 .
[本文引用: 1]
[15]
HU W WU Z SUN L , et al . Strategy for restarting the free-running induction motor driven by a high-voltage inverter based on V/f fuzzy control [C]//2016 8th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC). IEEE, 2016 , 1 :99 -102 .
[本文引用: 1]
[16]
安亚刚 . 基于高频注入法的异步电机无速度传感器控制 [D]. 徐州 : 中国矿业大学 , 2014 .
[本文引用: 1]
AN Yagang . The speed sensorless control of asynchronous motor based on high frequency signal injection method [D]. Xuzhou : China University of Mining and Technology , 2014 .
[本文引用: 1]
[17]
YANG H ZHANG Y WALKER P D , et al . A method to start rotating induction motor based on speed sensorless model-predictive control
[J]. IEEE Transactions on Energy Conversion , 2016 , 32 (1 ):359 -368 .
DOI:10.1109/TEC.2016.2614670
URL
[本文引用: 1]
[18]
GOU L YOU X WANG C , et al . Integral sliding-mode method based on back-EMF for restarting speed sensorless controlled induction motor at free running status [C]// 2018 IEEE Energy Conversion Congress and Exposition (ECCE). IEEE, 2018 :2382 -2388 .
[本文引用: 1]
[19]
PERNA D DEL PIZZO A . An assisted speed-sensorless control of induction motor drives for railways applications [C]//2016 International Conference on Electrical Systems for Aircraft,Railway,Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC). IEEE, 2016 :1 -7 .
[本文引用: 1]
[20]
熊成林 , 冯晓云 , 宋文胜 . 牵引电动机无速度传感器带速重投解决方案
[J]. 西南交通大学学报 , 2012 , 47 (5 ):820 -825 .
[本文引用: 1]
XIONG Chenglin FENG Xiaoyun SONG Wensheng . Solution for speed sensorless control system restarting at traction motor
[J]. Journal of Southwest Jiaotong University , 2012 , 47 (5 ):820 -825 .
[本文引用: 1]
无速度传感器控制技术及其在大功率牵引传动中的应用研究
1
2008
... 有速度传感器下可以实时获取电机转速,带速重投过程相对容易,但是在无速度传感器控制下,如果初始估计转速与实际转速偏差太大,在重投瞬间导致过流以及机械振动从而导致重投失败,因此无速度传感器控制下的带速重投是十分棘手的难题[1 ] .在逆变器封锁脉冲的过程中,电机的定子电流为零,转子磁链逐渐消失(大约2 s,即几倍转子时间常数的时间),此时电机处于不可观测的状态,因此为了顺利实现带速重投,需要完成对电机初始转速的估算. ...
Research of speed sensorless control technology and its application in high power AC traction drive
1
2008
... 有速度传感器下可以实时获取电机转速,带速重投过程相对容易,但是在无速度传感器控制下,如果初始估计转速与实际转速偏差太大,在重投瞬间导致过流以及机械振动从而导致重投失败,因此无速度传感器控制下的带速重投是十分棘手的难题[1 ] .在逆变器封锁脉冲的过程中,电机的定子电流为零,转子磁链逐渐消失(大约2 s,即几倍转子时间常数的时间),此时电机处于不可观测的状态,因此为了顺利实现带速重投,需要完成对电机初始转速的估算. ...
Universal restart strategy for scalar (V/f) controlled induction machines
1
2017
... 目前大部分的研究基于初始速度搜索法,通过调节定子频率以搜索电机转速.文献[2 ]中通过调节定子频率搜索逆变器输入功率最小的工作点以获取初始转速,但是此种方法搜索时间在1.5 s左右,导致重投的时间较长.文献[3 ]尝试搜索定子电流幅值最小工作点,尽管控制相对简单并且容易实现,但是也需要至少1 s的搜索时间.文献[4 ]则提出将转矩指令设定为零,通过调节同步频率使得反馈转矩为零获得电机转速,大约需要1.2 s的搜索时间.西门子的变频器使用手册中提到了一种转子频率搜索的方法[5 ] ,在搜索的过程中始终保持定子电流为恒定电流,通过将逆变器输出电压和V /f 曲线上的电压进行比较,在两者相等的点处获取转子频率,但是恒电流的控制会导致较大的输出转矩.国内中车株洲电力机车研究所尚敬等[6 ⇓ -8 ] 提出了一种适用于大功率电力机车的带速重投方法,主要利用同一定子电压矢量作用下定子电流矢量的空间Heyland圆的原理[9 ] ,根据实际转速与估计转速的偏差方向与电流矢量偏差方向相关的原理对转速进行查找,采用这种折半查找的方法搜索时间相对较长,并且需要对整个过程中磁链进行控制确保电流处于可控范围内[10 ] .日本学者KONDO[11 ] 提出了一种基于转子反电势的带速重投方法,基于反电势的速度计算法主要依据当估算转速收敛到实际转速时,d 轴转子反电势为零的原理进行初始转速的搜索,或者基于稳定条件下的反电势公式直接计算转速[12 ] ,但是此类方法在低速的效果相对较差,这是由于低速的反电势相对较低并且转速估算受定子电阻变化的影响相对较大. ...
1
1997
... 目前大部分的研究基于初始速度搜索法,通过调节定子频率以搜索电机转速.文献[2 ]中通过调节定子频率搜索逆变器输入功率最小的工作点以获取初始转速,但是此种方法搜索时间在1.5 s左右,导致重投的时间较长.文献[3 ]尝试搜索定子电流幅值最小工作点,尽管控制相对简单并且容易实现,但是也需要至少1 s的搜索时间.文献[4 ]则提出将转矩指令设定为零,通过调节同步频率使得反馈转矩为零获得电机转速,大约需要1.2 s的搜索时间.西门子的变频器使用手册中提到了一种转子频率搜索的方法[5 ] ,在搜索的过程中始终保持定子电流为恒定电流,通过将逆变器输出电压和V /f 曲线上的电压进行比较,在两者相等的点处获取转子频率,但是恒电流的控制会导致较大的输出转矩.国内中车株洲电力机车研究所尚敬等[6 ⇓ -8 ] 提出了一种适用于大功率电力机车的带速重投方法,主要利用同一定子电压矢量作用下定子电流矢量的空间Heyland圆的原理[9 ] ,根据实际转速与估计转速的偏差方向与电流矢量偏差方向相关的原理对转速进行查找,采用这种折半查找的方法搜索时间相对较长,并且需要对整个过程中磁链进行控制确保电流处于可控范围内[10 ] .日本学者KONDO[11 ] 提出了一种基于转子反电势的带速重投方法,基于反电势的速度计算法主要依据当估算转速收敛到实际转速时,d 轴转子反电势为零的原理进行初始转速的搜索,或者基于稳定条件下的反电势公式直接计算转速[12 ] ,但是此类方法在低速的效果相对较差,这是由于低速的反电势相对较低并且转速估算受定子电阻变化的影响相对较大. ...
1
2013
... 目前大部分的研究基于初始速度搜索法,通过调节定子频率以搜索电机转速.文献[2 ]中通过调节定子频率搜索逆变器输入功率最小的工作点以获取初始转速,但是此种方法搜索时间在1.5 s左右,导致重投的时间较长.文献[3 ]尝试搜索定子电流幅值最小工作点,尽管控制相对简单并且容易实现,但是也需要至少1 s的搜索时间.文献[4 ]则提出将转矩指令设定为零,通过调节同步频率使得反馈转矩为零获得电机转速,大约需要1.2 s的搜索时间.西门子的变频器使用手册中提到了一种转子频率搜索的方法[5 ] ,在搜索的过程中始终保持定子电流为恒定电流,通过将逆变器输出电压和V /f 曲线上的电压进行比较,在两者相等的点处获取转子频率,但是恒电流的控制会导致较大的输出转矩.国内中车株洲电力机车研究所尚敬等[6 ⇓ -8 ] 提出了一种适用于大功率电力机车的带速重投方法,主要利用同一定子电压矢量作用下定子电流矢量的空间Heyland圆的原理[9 ] ,根据实际转速与估计转速的偏差方向与电流矢量偏差方向相关的原理对转速进行查找,采用这种折半查找的方法搜索时间相对较长,并且需要对整个过程中磁链进行控制确保电流处于可控范围内[10 ] .日本学者KONDO[11 ] 提出了一种基于转子反电势的带速重投方法,基于反电势的速度计算法主要依据当估算转速收敛到实际转速时,d 轴转子反电势为零的原理进行初始转速的搜索,或者基于稳定条件下的反电势公式直接计算转速[12 ] ,但是此类方法在低速的效果相对较差,这是由于低速的反电势相对较低并且转速估算受定子电阻变化的影响相对较大. ...
1
2013
... 目前大部分的研究基于初始速度搜索法,通过调节定子频率以搜索电机转速.文献[2 ]中通过调节定子频率搜索逆变器输入功率最小的工作点以获取初始转速,但是此种方法搜索时间在1.5 s左右,导致重投的时间较长.文献[3 ]尝试搜索定子电流幅值最小工作点,尽管控制相对简单并且容易实现,但是也需要至少1 s的搜索时间.文献[4 ]则提出将转矩指令设定为零,通过调节同步频率使得反馈转矩为零获得电机转速,大约需要1.2 s的搜索时间.西门子的变频器使用手册中提到了一种转子频率搜索的方法[5 ] ,在搜索的过程中始终保持定子电流为恒定电流,通过将逆变器输出电压和V /f 曲线上的电压进行比较,在两者相等的点处获取转子频率,但是恒电流的控制会导致较大的输出转矩.国内中车株洲电力机车研究所尚敬等[6 ⇓ -8 ] 提出了一种适用于大功率电力机车的带速重投方法,主要利用同一定子电压矢量作用下定子电流矢量的空间Heyland圆的原理[9 ] ,根据实际转速与估计转速的偏差方向与电流矢量偏差方向相关的原理对转速进行查找,采用这种折半查找的方法搜索时间相对较长,并且需要对整个过程中磁链进行控制确保电流处于可控范围内[10 ] .日本学者KONDO[11 ] 提出了一种基于转子反电势的带速重投方法,基于反电势的速度计算法主要依据当估算转速收敛到实际转速时,d 轴转子反电势为零的原理进行初始转速的搜索,或者基于稳定条件下的反电势公式直接计算转速[12 ] ,但是此类方法在低速的效果相对较差,这是由于低速的反电势相对较低并且转速估算受定子电阻变化的影响相对较大. ...
一种异步电机再启动时转速估算方法
1
2012
... 目前大部分的研究基于初始速度搜索法,通过调节定子频率以搜索电机转速.文献[2 ]中通过调节定子频率搜索逆变器输入功率最小的工作点以获取初始转速,但是此种方法搜索时间在1.5 s左右,导致重投的时间较长.文献[3 ]尝试搜索定子电流幅值最小工作点,尽管控制相对简单并且容易实现,但是也需要至少1 s的搜索时间.文献[4 ]则提出将转矩指令设定为零,通过调节同步频率使得反馈转矩为零获得电机转速,大约需要1.2 s的搜索时间.西门子的变频器使用手册中提到了一种转子频率搜索的方法[5 ] ,在搜索的过程中始终保持定子电流为恒定电流,通过将逆变器输出电压和V /f 曲线上的电压进行比较,在两者相等的点处获取转子频率,但是恒电流的控制会导致较大的输出转矩.国内中车株洲电力机车研究所尚敬等[6 ⇓ -8 ] 提出了一种适用于大功率电力机车的带速重投方法,主要利用同一定子电压矢量作用下定子电流矢量的空间Heyland圆的原理[9 ] ,根据实际转速与估计转速的偏差方向与电流矢量偏差方向相关的原理对转速进行查找,采用这种折半查找的方法搜索时间相对较长,并且需要对整个过程中磁链进行控制确保电流处于可控范围内[10 ] .日本学者KONDO[11 ] 提出了一种基于转子反电势的带速重投方法,基于反电势的速度计算法主要依据当估算转速收敛到实际转速时,d 轴转子反电势为零的原理进行初始转速的搜索,或者基于稳定条件下的反电势公式直接计算转速[12 ] ,但是此类方法在低速的效果相对较差,这是由于低速的反电势相对较低并且转速估算受定子电阻变化的影响相对较大. ...
Speed estimation method for asynchronous motor restart
1
2012
... 目前大部分的研究基于初始速度搜索法,通过调节定子频率以搜索电机转速.文献[2 ]中通过调节定子频率搜索逆变器输入功率最小的工作点以获取初始转速,但是此种方法搜索时间在1.5 s左右,导致重投的时间较长.文献[3 ]尝试搜索定子电流幅值最小工作点,尽管控制相对简单并且容易实现,但是也需要至少1 s的搜索时间.文献[4 ]则提出将转矩指令设定为零,通过调节同步频率使得反馈转矩为零获得电机转速,大约需要1.2 s的搜索时间.西门子的变频器使用手册中提到了一种转子频率搜索的方法[5 ] ,在搜索的过程中始终保持定子电流为恒定电流,通过将逆变器输出电压和V /f 曲线上的电压进行比较,在两者相等的点处获取转子频率,但是恒电流的控制会导致较大的输出转矩.国内中车株洲电力机车研究所尚敬等[6 ⇓ -8 ] 提出了一种适用于大功率电力机车的带速重投方法,主要利用同一定子电压矢量作用下定子电流矢量的空间Heyland圆的原理[9 ] ,根据实际转速与估计转速的偏差方向与电流矢量偏差方向相关的原理对转速进行查找,采用这种折半查找的方法搜索时间相对较长,并且需要对整个过程中磁链进行控制确保电流处于可控范围内[10 ] .日本学者KONDO[11 ] 提出了一种基于转子反电势的带速重投方法,基于反电势的速度计算法主要依据当估算转速收敛到实际转速时,d 轴转子反电势为零的原理进行初始转速的搜索,或者基于稳定条件下的反电势公式直接计算转速[12 ] ,但是此类方法在低速的效果相对较差,这是由于低速的反电势相对较低并且转速估算受定子电阻变化的影响相对较大. ...
牵引电动机无速度传感器及带速度重投控制
1
2006
... 目前大部分的研究基于初始速度搜索法,通过调节定子频率以搜索电机转速.文献[2 ]中通过调节定子频率搜索逆变器输入功率最小的工作点以获取初始转速,但是此种方法搜索时间在1.5 s左右,导致重投的时间较长.文献[3 ]尝试搜索定子电流幅值最小工作点,尽管控制相对简单并且容易实现,但是也需要至少1 s的搜索时间.文献[4 ]则提出将转矩指令设定为零,通过调节同步频率使得反馈转矩为零获得电机转速,大约需要1.2 s的搜索时间.西门子的变频器使用手册中提到了一种转子频率搜索的方法[5 ] ,在搜索的过程中始终保持定子电流为恒定电流,通过将逆变器输出电压和V /f 曲线上的电压进行比较,在两者相等的点处获取转子频率,但是恒电流的控制会导致较大的输出转矩.国内中车株洲电力机车研究所尚敬等[6 ⇓ -8 ] 提出了一种适用于大功率电力机车的带速重投方法,主要利用同一定子电压矢量作用下定子电流矢量的空间Heyland圆的原理[9 ] ,根据实际转速与估计转速的偏差方向与电流矢量偏差方向相关的原理对转速进行查找,采用这种折半查找的方法搜索时间相对较长,并且需要对整个过程中磁链进行控制确保电流处于可控范围内[10 ] .日本学者KONDO[11 ] 提出了一种基于转子反电势的带速重投方法,基于反电势的速度计算法主要依据当估算转速收敛到实际转速时,d 轴转子反电势为零的原理进行初始转速的搜索,或者基于稳定条件下的反电势公式直接计算转速[12 ] ,但是此类方法在低速的效果相对较差,这是由于低速的反电势相对较低并且转速估算受定子电阻变化的影响相对较大. ...
Speed sensorless control and restarting at unknown speed of traction motor
1
2006
... 目前大部分的研究基于初始速度搜索法,通过调节定子频率以搜索电机转速.文献[2 ]中通过调节定子频率搜索逆变器输入功率最小的工作点以获取初始转速,但是此种方法搜索时间在1.5 s左右,导致重投的时间较长.文献[3 ]尝试搜索定子电流幅值最小工作点,尽管控制相对简单并且容易实现,但是也需要至少1 s的搜索时间.文献[4 ]则提出将转矩指令设定为零,通过调节同步频率使得反馈转矩为零获得电机转速,大约需要1.2 s的搜索时间.西门子的变频器使用手册中提到了一种转子频率搜索的方法[5 ] ,在搜索的过程中始终保持定子电流为恒定电流,通过将逆变器输出电压和V /f 曲线上的电压进行比较,在两者相等的点处获取转子频率,但是恒电流的控制会导致较大的输出转矩.国内中车株洲电力机车研究所尚敬等[6 ⇓ -8 ] 提出了一种适用于大功率电力机车的带速重投方法,主要利用同一定子电压矢量作用下定子电流矢量的空间Heyland圆的原理[9 ] ,根据实际转速与估计转速的偏差方向与电流矢量偏差方向相关的原理对转速进行查找,采用这种折半查找的方法搜索时间相对较长,并且需要对整个过程中磁链进行控制确保电流处于可控范围内[10 ] .日本学者KONDO[11 ] 提出了一种基于转子反电势的带速重投方法,基于反电势的速度计算法主要依据当估算转速收敛到实际转速时,d 轴转子反电势为零的原理进行初始转速的搜索,或者基于稳定条件下的反电势公式直接计算转速[12 ] ,但是此类方法在低速的效果相对较差,这是由于低速的反电势相对较低并且转速估算受定子电阻变化的影响相对较大. ...
电力牵引异步电动机无速度传感器间接定子量控制
1
2007
... 目前大部分的研究基于初始速度搜索法,通过调节定子频率以搜索电机转速.文献[2 ]中通过调节定子频率搜索逆变器输入功率最小的工作点以获取初始转速,但是此种方法搜索时间在1.5 s左右,导致重投的时间较长.文献[3 ]尝试搜索定子电流幅值最小工作点,尽管控制相对简单并且容易实现,但是也需要至少1 s的搜索时间.文献[4 ]则提出将转矩指令设定为零,通过调节同步频率使得反馈转矩为零获得电机转速,大约需要1.2 s的搜索时间.西门子的变频器使用手册中提到了一种转子频率搜索的方法[5 ] ,在搜索的过程中始终保持定子电流为恒定电流,通过将逆变器输出电压和V /f 曲线上的电压进行比较,在两者相等的点处获取转子频率,但是恒电流的控制会导致较大的输出转矩.国内中车株洲电力机车研究所尚敬等[6 ⇓ -8 ] 提出了一种适用于大功率电力机车的带速重投方法,主要利用同一定子电压矢量作用下定子电流矢量的空间Heyland圆的原理[9 ] ,根据实际转速与估计转速的偏差方向与电流矢量偏差方向相关的原理对转速进行查找,采用这种折半查找的方法搜索时间相对较长,并且需要对整个过程中磁链进行控制确保电流处于可控范围内[10 ] .日本学者KONDO[11 ] 提出了一种基于转子反电势的带速重投方法,基于反电势的速度计算法主要依据当估算转速收敛到实际转速时,d 轴转子反电势为零的原理进行初始转速的搜索,或者基于稳定条件下的反电势公式直接计算转速[12 ] ,但是此类方法在低速的效果相对较差,这是由于低速的反电势相对较低并且转速估算受定子电阻变化的影响相对较大. ...
Speed sensorless indirect stator-quantities control of induction motor in electric traction
1
2007
... 目前大部分的研究基于初始速度搜索法,通过调节定子频率以搜索电机转速.文献[2 ]中通过调节定子频率搜索逆变器输入功率最小的工作点以获取初始转速,但是此种方法搜索时间在1.5 s左右,导致重投的时间较长.文献[3 ]尝试搜索定子电流幅值最小工作点,尽管控制相对简单并且容易实现,但是也需要至少1 s的搜索时间.文献[4 ]则提出将转矩指令设定为零,通过调节同步频率使得反馈转矩为零获得电机转速,大约需要1.2 s的搜索时间.西门子的变频器使用手册中提到了一种转子频率搜索的方法[5 ] ,在搜索的过程中始终保持定子电流为恒定电流,通过将逆变器输出电压和V /f 曲线上的电压进行比较,在两者相等的点处获取转子频率,但是恒电流的控制会导致较大的输出转矩.国内中车株洲电力机车研究所尚敬等[6 ⇓ -8 ] 提出了一种适用于大功率电力机车的带速重投方法,主要利用同一定子电压矢量作用下定子电流矢量的空间Heyland圆的原理[9 ] ,根据实际转速与估计转速的偏差方向与电流矢量偏差方向相关的原理对转速进行查找,采用这种折半查找的方法搜索时间相对较长,并且需要对整个过程中磁链进行控制确保电流处于可控范围内[10 ] .日本学者KONDO[11 ] 提出了一种基于转子反电势的带速重投方法,基于反电势的速度计算法主要依据当估算转速收敛到实际转速时,d 轴转子反电势为零的原理进行初始转速的搜索,或者基于稳定条件下的反电势公式直接计算转速[12 ] ,但是此类方法在低速的效果相对较差,这是由于低速的反电势相对较低并且转速估算受定子电阻变化的影响相对较大. ...
感应电机无速度传感器控制带速重投研究
1
2008
... 目前大部分的研究基于初始速度搜索法,通过调节定子频率以搜索电机转速.文献[2 ]中通过调节定子频率搜索逆变器输入功率最小的工作点以获取初始转速,但是此种方法搜索时间在1.5 s左右,导致重投的时间较长.文献[3 ]尝试搜索定子电流幅值最小工作点,尽管控制相对简单并且容易实现,但是也需要至少1 s的搜索时间.文献[4 ]则提出将转矩指令设定为零,通过调节同步频率使得反馈转矩为零获得电机转速,大约需要1.2 s的搜索时间.西门子的变频器使用手册中提到了一种转子频率搜索的方法[5 ] ,在搜索的过程中始终保持定子电流为恒定电流,通过将逆变器输出电压和V /f 曲线上的电压进行比较,在两者相等的点处获取转子频率,但是恒电流的控制会导致较大的输出转矩.国内中车株洲电力机车研究所尚敬等[6 ⇓ -8 ] 提出了一种适用于大功率电力机车的带速重投方法,主要利用同一定子电压矢量作用下定子电流矢量的空间Heyland圆的原理[9 ] ,根据实际转速与估计转速的偏差方向与电流矢量偏差方向相关的原理对转速进行查找,采用这种折半查找的方法搜索时间相对较长,并且需要对整个过程中磁链进行控制确保电流处于可控范围内[10 ] .日本学者KONDO[11 ] 提出了一种基于转子反电势的带速重投方法,基于反电势的速度计算法主要依据当估算转速收敛到实际转速时,d 轴转子反电势为零的原理进行初始转速的搜索,或者基于稳定条件下的反电势公式直接计算转速[12 ] ,但是此类方法在低速的效果相对较差,这是由于低速的反电势相对较低并且转速估算受定子电阻变化的影响相对较大. ...
Study on restarting at unknown speed with speed-sensorless contorl of induction motor
1
2008
... 目前大部分的研究基于初始速度搜索法,通过调节定子频率以搜索电机转速.文献[2 ]中通过调节定子频率搜索逆变器输入功率最小的工作点以获取初始转速,但是此种方法搜索时间在1.5 s左右,导致重投的时间较长.文献[3 ]尝试搜索定子电流幅值最小工作点,尽管控制相对简单并且容易实现,但是也需要至少1 s的搜索时间.文献[4 ]则提出将转矩指令设定为零,通过调节同步频率使得反馈转矩为零获得电机转速,大约需要1.2 s的搜索时间.西门子的变频器使用手册中提到了一种转子频率搜索的方法[5 ] ,在搜索的过程中始终保持定子电流为恒定电流,通过将逆变器输出电压和V /f 曲线上的电压进行比较,在两者相等的点处获取转子频率,但是恒电流的控制会导致较大的输出转矩.国内中车株洲电力机车研究所尚敬等[6 ⇓ -8 ] 提出了一种适用于大功率电力机车的带速重投方法,主要利用同一定子电压矢量作用下定子电流矢量的空间Heyland圆的原理[9 ] ,根据实际转速与估计转速的偏差方向与电流矢量偏差方向相关的原理对转速进行查找,采用这种折半查找的方法搜索时间相对较长,并且需要对整个过程中磁链进行控制确保电流处于可控范围内[10 ] .日本学者KONDO[11 ] 提出了一种基于转子反电势的带速重投方法,基于反电势的速度计算法主要依据当估算转速收敛到实际转速时,d 轴转子反电势为零的原理进行初始转速的搜索,或者基于稳定条件下的反电势公式直接计算转速[12 ] ,但是此类方法在低速的效果相对较差,这是由于低速的反电势相对较低并且转速估算受定子电阻变化的影响相对较大. ...
1
1998
... 目前大部分的研究基于初始速度搜索法,通过调节定子频率以搜索电机转速.文献[2 ]中通过调节定子频率搜索逆变器输入功率最小的工作点以获取初始转速,但是此种方法搜索时间在1.5 s左右,导致重投的时间较长.文献[3 ]尝试搜索定子电流幅值最小工作点,尽管控制相对简单并且容易实现,但是也需要至少1 s的搜索时间.文献[4 ]则提出将转矩指令设定为零,通过调节同步频率使得反馈转矩为零获得电机转速,大约需要1.2 s的搜索时间.西门子的变频器使用手册中提到了一种转子频率搜索的方法[5 ] ,在搜索的过程中始终保持定子电流为恒定电流,通过将逆变器输出电压和V /f 曲线上的电压进行比较,在两者相等的点处获取转子频率,但是恒电流的控制会导致较大的输出转矩.国内中车株洲电力机车研究所尚敬等[6 ⇓ -8 ] 提出了一种适用于大功率电力机车的带速重投方法,主要利用同一定子电压矢量作用下定子电流矢量的空间Heyland圆的原理[9 ] ,根据实际转速与估计转速的偏差方向与电流矢量偏差方向相关的原理对转速进行查找,采用这种折半查找的方法搜索时间相对较长,并且需要对整个过程中磁链进行控制确保电流处于可控范围内[10 ] .日本学者KONDO[11 ] 提出了一种基于转子反电势的带速重投方法,基于反电势的速度计算法主要依据当估算转速收敛到实际转速时,d 轴转子反电势为零的原理进行初始转速的搜索,或者基于稳定条件下的反电势公式直接计算转速[12 ] ,但是此类方法在低速的效果相对较差,这是由于低速的反电势相对较低并且转速估算受定子电阻变化的影响相对较大. ...
1
2007
... 目前大部分的研究基于初始速度搜索法,通过调节定子频率以搜索电机转速.文献[2 ]中通过调节定子频率搜索逆变器输入功率最小的工作点以获取初始转速,但是此种方法搜索时间在1.5 s左右,导致重投的时间较长.文献[3 ]尝试搜索定子电流幅值最小工作点,尽管控制相对简单并且容易实现,但是也需要至少1 s的搜索时间.文献[4 ]则提出将转矩指令设定为零,通过调节同步频率使得反馈转矩为零获得电机转速,大约需要1.2 s的搜索时间.西门子的变频器使用手册中提到了一种转子频率搜索的方法[5 ] ,在搜索的过程中始终保持定子电流为恒定电流,通过将逆变器输出电压和V /f 曲线上的电压进行比较,在两者相等的点处获取转子频率,但是恒电流的控制会导致较大的输出转矩.国内中车株洲电力机车研究所尚敬等[6 ⇓ -8 ] 提出了一种适用于大功率电力机车的带速重投方法,主要利用同一定子电压矢量作用下定子电流矢量的空间Heyland圆的原理[9 ] ,根据实际转速与估计转速的偏差方向与电流矢量偏差方向相关的原理对转速进行查找,采用这种折半查找的方法搜索时间相对较长,并且需要对整个过程中磁链进行控制确保电流处于可控范围内[10 ] .日本学者KONDO[11 ] 提出了一种基于转子反电势的带速重投方法,基于反电势的速度计算法主要依据当估算转速收敛到实际转速时,d 轴转子反电势为零的原理进行初始转速的搜索,或者基于稳定条件下的反电势公式直接计算转速[12 ] ,但是此类方法在低速的效果相对较差,这是由于低速的反电势相对较低并且转速估算受定子电阻变化的影响相对较大. ...
1
2007
... 目前大部分的研究基于初始速度搜索法,通过调节定子频率以搜索电机转速.文献[2 ]中通过调节定子频率搜索逆变器输入功率最小的工作点以获取初始转速,但是此种方法搜索时间在1.5 s左右,导致重投的时间较长.文献[3 ]尝试搜索定子电流幅值最小工作点,尽管控制相对简单并且容易实现,但是也需要至少1 s的搜索时间.文献[4 ]则提出将转矩指令设定为零,通过调节同步频率使得反馈转矩为零获得电机转速,大约需要1.2 s的搜索时间.西门子的变频器使用手册中提到了一种转子频率搜索的方法[5 ] ,在搜索的过程中始终保持定子电流为恒定电流,通过将逆变器输出电压和V /f 曲线上的电压进行比较,在两者相等的点处获取转子频率,但是恒电流的控制会导致较大的输出转矩.国内中车株洲电力机车研究所尚敬等[6 ⇓ -8 ] 提出了一种适用于大功率电力机车的带速重投方法,主要利用同一定子电压矢量作用下定子电流矢量的空间Heyland圆的原理[9 ] ,根据实际转速与估计转速的偏差方向与电流矢量偏差方向相关的原理对转速进行查找,采用这种折半查找的方法搜索时间相对较长,并且需要对整个过程中磁链进行控制确保电流处于可控范围内[10 ] .日本学者KONDO[11 ] 提出了一种基于转子反电势的带速重投方法,基于反电势的速度计算法主要依据当估算转速收敛到实际转速时,d 轴转子反电势为零的原理进行初始转速的搜索,或者基于稳定条件下的反电势公式直接计算转速[12 ] ,但是此类方法在低速的效果相对较差,这是由于低速的反电势相对较低并且转速估算受定子电阻变化的影响相对较大. ...
1
2015
... 目前大部分的研究基于初始速度搜索法,通过调节定子频率以搜索电机转速.文献[2 ]中通过调节定子频率搜索逆变器输入功率最小的工作点以获取初始转速,但是此种方法搜索时间在1.5 s左右,导致重投的时间较长.文献[3 ]尝试搜索定子电流幅值最小工作点,尽管控制相对简单并且容易实现,但是也需要至少1 s的搜索时间.文献[4 ]则提出将转矩指令设定为零,通过调节同步频率使得反馈转矩为零获得电机转速,大约需要1.2 s的搜索时间.西门子的变频器使用手册中提到了一种转子频率搜索的方法[5 ] ,在搜索的过程中始终保持定子电流为恒定电流,通过将逆变器输出电压和V /f 曲线上的电压进行比较,在两者相等的点处获取转子频率,但是恒电流的控制会导致较大的输出转矩.国内中车株洲电力机车研究所尚敬等[6 ⇓ -8 ] 提出了一种适用于大功率电力机车的带速重投方法,主要利用同一定子电压矢量作用下定子电流矢量的空间Heyland圆的原理[9 ] ,根据实际转速与估计转速的偏差方向与电流矢量偏差方向相关的原理对转速进行查找,采用这种折半查找的方法搜索时间相对较长,并且需要对整个过程中磁链进行控制确保电流处于可控范围内[10 ] .日本学者KONDO[11 ] 提出了一种基于转子反电势的带速重投方法,基于反电势的速度计算法主要依据当估算转速收敛到实际转速时,d 轴转子反电势为零的原理进行初始转速的搜索,或者基于稳定条件下的反电势公式直接计算转速[12 ] ,但是此类方法在低速的效果相对较差,这是由于低速的反电势相对较低并且转速估算受定子电阻变化的影响相对较大. ...
1
2002
... 目前大部分的研究基于初始速度搜索法,通过调节定子频率以搜索电机转速.文献[2 ]中通过调节定子频率搜索逆变器输入功率最小的工作点以获取初始转速,但是此种方法搜索时间在1.5 s左右,导致重投的时间较长.文献[3 ]尝试搜索定子电流幅值最小工作点,尽管控制相对简单并且容易实现,但是也需要至少1 s的搜索时间.文献[4 ]则提出将转矩指令设定为零,通过调节同步频率使得反馈转矩为零获得电机转速,大约需要1.2 s的搜索时间.西门子的变频器使用手册中提到了一种转子频率搜索的方法[5 ] ,在搜索的过程中始终保持定子电流为恒定电流,通过将逆变器输出电压和V /f 曲线上的电压进行比较,在两者相等的点处获取转子频率,但是恒电流的控制会导致较大的输出转矩.国内中车株洲电力机车研究所尚敬等[6 ⇓ -8 ] 提出了一种适用于大功率电力机车的带速重投方法,主要利用同一定子电压矢量作用下定子电流矢量的空间Heyland圆的原理[9 ] ,根据实际转速与估计转速的偏差方向与电流矢量偏差方向相关的原理对转速进行查找,采用这种折半查找的方法搜索时间相对较长,并且需要对整个过程中磁链进行控制确保电流处于可控范围内[10 ] .日本学者KONDO[11 ] 提出了一种基于转子反电势的带速重投方法,基于反电势的速度计算法主要依据当估算转速收敛到实际转速时,d 轴转子反电势为零的原理进行初始转速的搜索,或者基于稳定条件下的反电势公式直接计算转速[12 ] ,但是此类方法在低速的效果相对较差,这是由于低速的反电势相对较低并且转速估算受定子电阻变化的影响相对较大. ...
1
2015
... 此外还有一些其他的带速重投方法,文献[13 ]中在短时电力中断后利用一个状态观测器完成对电机转速的估算,但是在转子磁链逐渐减小到零后此种方法将会失效,此时也就无法继续获取转速信息.文献[14 ]中则利用感应电机的阻抗特性将电机与逆变器组成振荡器,从而从振荡的电流中获取旋转电机转速信息,但会产生较大的转矩振荡;还有采用模糊控制进行初始转速辨识[15 ] ,其仅仅应用于小功率的恒压频比控制的变频器中;也有利用高频信号注入获取电机转速的方法[16 ] ,通过单相高频注入检测高频环流的大小获取转速,其对电流采样以及信号处理要求较高;此外有学者对带速重投过程中的稳定性进行了理论分析,并对转速观测的收敛域进行了分类;还有将模型预测控制应用于无速度传感器控制并研究其带速重投下的转速辨识性能[17 ] ,以及将积分滑模算法应用于带速重投中的转速辨识[18 ] .在轨道交通领域,有学者尝试利用列车网络信号获取电机转速[19 ] ,此方法在列车紧急牵引等没有列车网络的情况下将会失效.文献[20 ]中为了避免列车惰行封锁脉冲后带速重投的问题,采用再生制动工况代替惰行工况,此方法仅针对特定车型适用. ...
异步电动机无速度传感器再起动方法的研究
1
2003
... 此外还有一些其他的带速重投方法,文献[13 ]中在短时电力中断后利用一个状态观测器完成对电机转速的估算,但是在转子磁链逐渐减小到零后此种方法将会失效,此时也就无法继续获取转速信息.文献[14 ]中则利用感应电机的阻抗特性将电机与逆变器组成振荡器,从而从振荡的电流中获取旋转电机转速信息,但会产生较大的转矩振荡;还有采用模糊控制进行初始转速辨识[15 ] ,其仅仅应用于小功率的恒压频比控制的变频器中;也有利用高频信号注入获取电机转速的方法[16 ] ,通过单相高频注入检测高频环流的大小获取转速,其对电流采样以及信号处理要求较高;此外有学者对带速重投过程中的稳定性进行了理论分析,并对转速观测的收敛域进行了分类;还有将模型预测控制应用于无速度传感器控制并研究其带速重投下的转速辨识性能[17 ] ,以及将积分滑模算法应用于带速重投中的转速辨识[18 ] .在轨道交通领域,有学者尝试利用列车网络信号获取电机转速[19 ] ,此方法在列车紧急牵引等没有列车网络的情况下将会失效.文献[20 ]中为了避免列车惰行封锁脉冲后带速重投的问题,采用再生制动工况代替惰行工况,此方法仅针对特定车型适用. ...
Research of speed sensorless restart method for asynchronous motor drive system
1
2003
... 此外还有一些其他的带速重投方法,文献[13 ]中在短时电力中断后利用一个状态观测器完成对电机转速的估算,但是在转子磁链逐渐减小到零后此种方法将会失效,此时也就无法继续获取转速信息.文献[14 ]中则利用感应电机的阻抗特性将电机与逆变器组成振荡器,从而从振荡的电流中获取旋转电机转速信息,但会产生较大的转矩振荡;还有采用模糊控制进行初始转速辨识[15 ] ,其仅仅应用于小功率的恒压频比控制的变频器中;也有利用高频信号注入获取电机转速的方法[16 ] ,通过单相高频注入检测高频环流的大小获取转速,其对电流采样以及信号处理要求较高;此外有学者对带速重投过程中的稳定性进行了理论分析,并对转速观测的收敛域进行了分类;还有将模型预测控制应用于无速度传感器控制并研究其带速重投下的转速辨识性能[17 ] ,以及将积分滑模算法应用于带速重投中的转速辨识[18 ] .在轨道交通领域,有学者尝试利用列车网络信号获取电机转速[19 ] ,此方法在列车紧急牵引等没有列车网络的情况下将会失效.文献[20 ]中为了避免列车惰行封锁脉冲后带速重投的问题,采用再生制动工况代替惰行工况,此方法仅针对特定车型适用. ...
1
2016
... 此外还有一些其他的带速重投方法,文献[13 ]中在短时电力中断后利用一个状态观测器完成对电机转速的估算,但是在转子磁链逐渐减小到零后此种方法将会失效,此时也就无法继续获取转速信息.文献[14 ]中则利用感应电机的阻抗特性将电机与逆变器组成振荡器,从而从振荡的电流中获取旋转电机转速信息,但会产生较大的转矩振荡;还有采用模糊控制进行初始转速辨识[15 ] ,其仅仅应用于小功率的恒压频比控制的变频器中;也有利用高频信号注入获取电机转速的方法[16 ] ,通过单相高频注入检测高频环流的大小获取转速,其对电流采样以及信号处理要求较高;此外有学者对带速重投过程中的稳定性进行了理论分析,并对转速观测的收敛域进行了分类;还有将模型预测控制应用于无速度传感器控制并研究其带速重投下的转速辨识性能[17 ] ,以及将积分滑模算法应用于带速重投中的转速辨识[18 ] .在轨道交通领域,有学者尝试利用列车网络信号获取电机转速[19 ] ,此方法在列车紧急牵引等没有列车网络的情况下将会失效.文献[20 ]中为了避免列车惰行封锁脉冲后带速重投的问题,采用再生制动工况代替惰行工况,此方法仅针对特定车型适用. ...
1
2014
... 此外还有一些其他的带速重投方法,文献[13 ]中在短时电力中断后利用一个状态观测器完成对电机转速的估算,但是在转子磁链逐渐减小到零后此种方法将会失效,此时也就无法继续获取转速信息.文献[14 ]中则利用感应电机的阻抗特性将电机与逆变器组成振荡器,从而从振荡的电流中获取旋转电机转速信息,但会产生较大的转矩振荡;还有采用模糊控制进行初始转速辨识[15 ] ,其仅仅应用于小功率的恒压频比控制的变频器中;也有利用高频信号注入获取电机转速的方法[16 ] ,通过单相高频注入检测高频环流的大小获取转速,其对电流采样以及信号处理要求较高;此外有学者对带速重投过程中的稳定性进行了理论分析,并对转速观测的收敛域进行了分类;还有将模型预测控制应用于无速度传感器控制并研究其带速重投下的转速辨识性能[17 ] ,以及将积分滑模算法应用于带速重投中的转速辨识[18 ] .在轨道交通领域,有学者尝试利用列车网络信号获取电机转速[19 ] ,此方法在列车紧急牵引等没有列车网络的情况下将会失效.文献[20 ]中为了避免列车惰行封锁脉冲后带速重投的问题,采用再生制动工况代替惰行工况,此方法仅针对特定车型适用. ...
1
2014
... 此外还有一些其他的带速重投方法,文献[13 ]中在短时电力中断后利用一个状态观测器完成对电机转速的估算,但是在转子磁链逐渐减小到零后此种方法将会失效,此时也就无法继续获取转速信息.文献[14 ]中则利用感应电机的阻抗特性将电机与逆变器组成振荡器,从而从振荡的电流中获取旋转电机转速信息,但会产生较大的转矩振荡;还有采用模糊控制进行初始转速辨识[15 ] ,其仅仅应用于小功率的恒压频比控制的变频器中;也有利用高频信号注入获取电机转速的方法[16 ] ,通过单相高频注入检测高频环流的大小获取转速,其对电流采样以及信号处理要求较高;此外有学者对带速重投过程中的稳定性进行了理论分析,并对转速观测的收敛域进行了分类;还有将模型预测控制应用于无速度传感器控制并研究其带速重投下的转速辨识性能[17 ] ,以及将积分滑模算法应用于带速重投中的转速辨识[18 ] .在轨道交通领域,有学者尝试利用列车网络信号获取电机转速[19 ] ,此方法在列车紧急牵引等没有列车网络的情况下将会失效.文献[20 ]中为了避免列车惰行封锁脉冲后带速重投的问题,采用再生制动工况代替惰行工况,此方法仅针对特定车型适用. ...
A method to start rotating induction motor based on speed sensorless model-predictive control
1
2016
... 此外还有一些其他的带速重投方法,文献[13 ]中在短时电力中断后利用一个状态观测器完成对电机转速的估算,但是在转子磁链逐渐减小到零后此种方法将会失效,此时也就无法继续获取转速信息.文献[14 ]中则利用感应电机的阻抗特性将电机与逆变器组成振荡器,从而从振荡的电流中获取旋转电机转速信息,但会产生较大的转矩振荡;还有采用模糊控制进行初始转速辨识[15 ] ,其仅仅应用于小功率的恒压频比控制的变频器中;也有利用高频信号注入获取电机转速的方法[16 ] ,通过单相高频注入检测高频环流的大小获取转速,其对电流采样以及信号处理要求较高;此外有学者对带速重投过程中的稳定性进行了理论分析,并对转速观测的收敛域进行了分类;还有将模型预测控制应用于无速度传感器控制并研究其带速重投下的转速辨识性能[17 ] ,以及将积分滑模算法应用于带速重投中的转速辨识[18 ] .在轨道交通领域,有学者尝试利用列车网络信号获取电机转速[19 ] ,此方法在列车紧急牵引等没有列车网络的情况下将会失效.文献[20 ]中为了避免列车惰行封锁脉冲后带速重投的问题,采用再生制动工况代替惰行工况,此方法仅针对特定车型适用. ...
1
2018
... 此外还有一些其他的带速重投方法,文献[13 ]中在短时电力中断后利用一个状态观测器完成对电机转速的估算,但是在转子磁链逐渐减小到零后此种方法将会失效,此时也就无法继续获取转速信息.文献[14 ]中则利用感应电机的阻抗特性将电机与逆变器组成振荡器,从而从振荡的电流中获取旋转电机转速信息,但会产生较大的转矩振荡;还有采用模糊控制进行初始转速辨识[15 ] ,其仅仅应用于小功率的恒压频比控制的变频器中;也有利用高频信号注入获取电机转速的方法[16 ] ,通过单相高频注入检测高频环流的大小获取转速,其对电流采样以及信号处理要求较高;此外有学者对带速重投过程中的稳定性进行了理论分析,并对转速观测的收敛域进行了分类;还有将模型预测控制应用于无速度传感器控制并研究其带速重投下的转速辨识性能[17 ] ,以及将积分滑模算法应用于带速重投中的转速辨识[18 ] .在轨道交通领域,有学者尝试利用列车网络信号获取电机转速[19 ] ,此方法在列车紧急牵引等没有列车网络的情况下将会失效.文献[20 ]中为了避免列车惰行封锁脉冲后带速重投的问题,采用再生制动工况代替惰行工况,此方法仅针对特定车型适用. ...
1
2016
... 此外还有一些其他的带速重投方法,文献[13 ]中在短时电力中断后利用一个状态观测器完成对电机转速的估算,但是在转子磁链逐渐减小到零后此种方法将会失效,此时也就无法继续获取转速信息.文献[14 ]中则利用感应电机的阻抗特性将电机与逆变器组成振荡器,从而从振荡的电流中获取旋转电机转速信息,但会产生较大的转矩振荡;还有采用模糊控制进行初始转速辨识[15 ] ,其仅仅应用于小功率的恒压频比控制的变频器中;也有利用高频信号注入获取电机转速的方法[16 ] ,通过单相高频注入检测高频环流的大小获取转速,其对电流采样以及信号处理要求较高;此外有学者对带速重投过程中的稳定性进行了理论分析,并对转速观测的收敛域进行了分类;还有将模型预测控制应用于无速度传感器控制并研究其带速重投下的转速辨识性能[17 ] ,以及将积分滑模算法应用于带速重投中的转速辨识[18 ] .在轨道交通领域,有学者尝试利用列车网络信号获取电机转速[19 ] ,此方法在列车紧急牵引等没有列车网络的情况下将会失效.文献[20 ]中为了避免列车惰行封锁脉冲后带速重投的问题,采用再生制动工况代替惰行工况,此方法仅针对特定车型适用. ...
牵引电动机无速度传感器带速重投解决方案
1
2012
... 此外还有一些其他的带速重投方法,文献[13 ]中在短时电力中断后利用一个状态观测器完成对电机转速的估算,但是在转子磁链逐渐减小到零后此种方法将会失效,此时也就无法继续获取转速信息.文献[14 ]中则利用感应电机的阻抗特性将电机与逆变器组成振荡器,从而从振荡的电流中获取旋转电机转速信息,但会产生较大的转矩振荡;还有采用模糊控制进行初始转速辨识[15 ] ,其仅仅应用于小功率的恒压频比控制的变频器中;也有利用高频信号注入获取电机转速的方法[16 ] ,通过单相高频注入检测高频环流的大小获取转速,其对电流采样以及信号处理要求较高;此外有学者对带速重投过程中的稳定性进行了理论分析,并对转速观测的收敛域进行了分类;还有将模型预测控制应用于无速度传感器控制并研究其带速重投下的转速辨识性能[17 ] ,以及将积分滑模算法应用于带速重投中的转速辨识[18 ] .在轨道交通领域,有学者尝试利用列车网络信号获取电机转速[19 ] ,此方法在列车紧急牵引等没有列车网络的情况下将会失效.文献[20 ]中为了避免列车惰行封锁脉冲后带速重投的问题,采用再生制动工况代替惰行工况,此方法仅针对特定车型适用. ...
Solution for speed sensorless control system restarting at traction motor
1
2012
... 此外还有一些其他的带速重投方法,文献[13 ]中在短时电力中断后利用一个状态观测器完成对电机转速的估算,但是在转子磁链逐渐减小到零后此种方法将会失效,此时也就无法继续获取转速信息.文献[14 ]中则利用感应电机的阻抗特性将电机与逆变器组成振荡器,从而从振荡的电流中获取旋转电机转速信息,但会产生较大的转矩振荡;还有采用模糊控制进行初始转速辨识[15 ] ,其仅仅应用于小功率的恒压频比控制的变频器中;也有利用高频信号注入获取电机转速的方法[16 ] ,通过单相高频注入检测高频环流的大小获取转速,其对电流采样以及信号处理要求较高;此外有学者对带速重投过程中的稳定性进行了理论分析,并对转速观测的收敛域进行了分类;还有将模型预测控制应用于无速度传感器控制并研究其带速重投下的转速辨识性能[17 ] ,以及将积分滑模算法应用于带速重投中的转速辨识[18 ] .在轨道交通领域,有学者尝试利用列车网络信号获取电机转速[19 ] ,此方法在列车紧急牵引等没有列车网络的情况下将会失效.文献[20 ]中为了避免列车惰行封锁脉冲后带速重投的问题,采用再生制动工况代替惰行工况,此方法仅针对特定车型适用. ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}