1 引言
H型运动平台是由三台永磁直线同步电机组成的三轴控制系统,具有推力大、定位精度高、响应速度快等优点,广泛应用于数控机床、机械加工等领域[1 -2 ] 。但系统在运行过程中,受到机械耦合、参数摄动、外部扰动等影响,造成平行轴上的两台电机动态不匹配,从而降低系统的同步精度。因此,如何减小这些因素对H型平台伺服系统同步性能的影响,进一步提高系统的同步精度,是目前直驱H型平台所需要解决的问题[3 -4 ] 。
直线电机采用的是直接驱动的方式,其容易受负载扰动、摩擦力以及外部等不确定扰动的影响[5 ] 。针对扰动问题,文献[6 ]采用建立扰动模型的方法对圆筒型永磁直线同步电机伺服系统的扰动进行抑制,但事实上扰动很难用实际模型描述出来,所以,扰动抑制效果并不理想。自抗扰控制不依赖于被控对象的具体数学模型,通过对系统内外扰动进行统一观测、补偿,以提高系统的抗扰能力,使系统具有很强的鲁棒性[7 -8 ] 。文献[9 ]针对高速磁悬浮系统中负载扰动对三相PWM直流侧的输出电压造成影响,采用自抗扰对磁悬浮系统的负载扰动进行观测和抑制,以提高系统的鲁棒性。文献[10 ]基于自抗扰对扰动的监测和补偿,有效地解决了永磁同步电机在低速时容易受到扰动影响的问题,提高了系统的抗扰性。
对于直驱H型平台平行轴的同步控制主要有串联式、并联式、交叉耦合式等控制结构[11 -12 ] 。但串联式和并联式存在结构上的缺陷,在串联式系统中两台电机接收信号不同步,引起信号滞后性;并联式的缺陷是各轴电机独立控制,当一轴电机受到扰动时,难以保证同步性能。针对这种情况,KOREN[13 ] 提出交叉耦合控制,其思想是将双轴的跟踪误差进行耦合,将得到的混合误差分配给单轴位置补偿,以减小同步误差。交叉耦合不但保证了两台电机能同时接受信号,而且对两台电机建立联系。文献[14 -15 ]将交叉耦合控制应用到双直线电机的同步控制中,有效地提高了系统同步精度。但交叉耦合系数是常值,而扰动又是时刻变化的,这无疑弱化了系统的同步性能。文献[16 ]根据交叉耦合的思想,对多电机同步控制设计自适应神经网络同步补偿器,通过补偿器分别对各台电机的位置量进行补偿,有效地提高了系统的同步性能。虽然神经网络具有强大的学习能力,但是缺乏对模糊信息的处理能力,对现有的经验知识不能很好地利用。
针对以上分析,本文采用自抗扰控制和模糊型pi-sigma神经网络同步补偿器相结合的控制策略,用自抗扰对PMLSM的位置进行跟踪控制,以减小参数摄动、负载扰动等不确定因素对跟踪性能的影响,提高H型平台的单轴跟踪精度。同时,结合模糊与神经网络控制的优点,用模糊型pi-sigma神经网络同步补偿器对双轴进行补偿控制,通过模糊神经网络以任意精度逼近非线性系统的能力使同步误差在有限时间内趋近于零。最后,进行仿真验证。
2 H型平台的数学模型
(1) ${{F}_{\text{e}}}=\frac{3\text{ }\!\!\pi\!\!\text{ }{{n}_{\text{p}}}}{2\tau }\left[ {{\psi }_{\text{PM}}}{{i}_{\text{q}}}+\left( {{L}_{\text{d}}}-{{L}_{\text{q}}} \right){{i}_{\text{d}}}{{i}_{\text{q}}} \right]$
式中,n p 表示极对数;ψ PM 表示励磁磁链;i d 、i q 和L d 、L q 分别表示d 、q 坐标系下的电流和电感;τ 表示极距。
在d 、q 坐标系下,采用i d =0的矢量控制,则电磁推力可以简化为
(2) ${{F}_{\text{e}}}=\frac{3\text{ }\!\!\pi\!\!\text{ }{{n}_{\text{p}}}}{2\tau }{{\psi }_{\text{PM}}}{{i}_{\text{q}}}\text{=}{{K}_{\text{f}}}{{i}_{\text{q}}}$
(3) ${{F}_{\text{e}}}=M\ddot{d}+D\dot{d}+{{F}_{\text{d}}}$
式中,M 表示动子总质量;d 表示动子的位置;D 表示粘滞摩擦因数;F d 为扰动,包括负载扰动、摩擦力扰动和系统外扰动等不确定性扰动的集总。
(4) $\ddot{d}\left( t \right)=-\frac{D}{M}v\left( t \right)+\frac{{{K}_{\text{f}}}}{M}u-\frac{{{F}_{\text{d}}}}{M}$
式中,$v\left( t \right)=\dot{d}\left( t \right)$ v 表示动子速度;u =i q ,u 为系统控制的输入量。
直驱H型运动平台是由Y 轴方向上的两台平行放置的PMLSM,和X 轴上的一台PMLSM共同驱动。根据式(4)可得直驱H型平台的数学模型为
(5) $\ddot{d}=A\dot{d}+Bu+F$
$A=\left[ \begin{align} & -\frac{{{D}_{1}}}{{{M}_{1}}}00 \\ & 0-\frac{{{D}_{2}}}{{{M}_{2}}}0 \\ & 00-\frac{{{D}_{x}}}{{{M}_{x}}} \\ \end{align} \right]$ $d=\left[ \begin{align} & {{d}_{1}} \\ & {{d}_{2}} \\ & {{d}_{x}} \\ \end{align} \right]$
$B=\left[ \begin{align} & \frac{{{K}_{f1}}}{{{M}_{\text{1}}}}00 \\ & 0\frac{{{K}_{\text{f2}}}}{{{M}_{2}}}0 \\ & 00\frac{{{K}_{\text{f}x}}}{{{M}_{x}}} \\ \end{align} \right]$ $u=\left[ \begin{align} & {{u}_{1}} \\ & {{u}_{2}} \\ & {{u}_{x}} \\ \end{align} \right]$ $F=\left[ \begin{align} & {{F}_{\text{d1}}} \\ & {{F}_{\text{d2}}} \\ & {{F}_{\text{d}x}} \\ \end{align} \right]$
式中,下标1、2、x 分别表示Y 1 轴、Y 2 轴、X 轴。
3 ADRC控制器的设计
PMLSM易受到参数摄动、负载扰动、摩擦力等不确定扰动的影响,从而降低系统的跟踪性能。为了提高PMLSM位置跟踪精度,采用ADRC减小直线电机的位置跟踪误差。
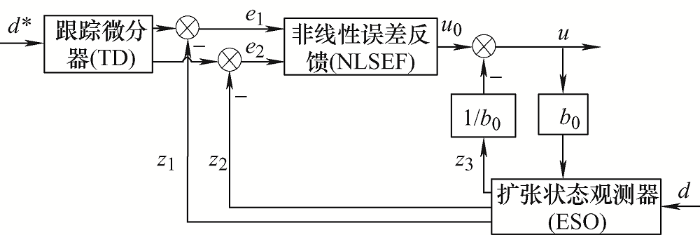
基于ADRC的PMLSM位置控制结构如图1 所示。首先跟踪微分器(Tracking differentiator,TD)对输入信号进行快速跟踪,并给出其微分信号,以解决快速和超调的矛盾,然后通过扩张状态观测器(Extended state observer,ESO)对PMLSM的扰动实时估计、补偿,最后通过非线性误差反馈控制律(Nonlinear law state error feedback,NLSEF)把系统的位置跟踪误差及速度跟踪误差进行非线性化组合,得到系统的控制量。
图1
(1) 跟踪微分器的设计。TD的设计如式(6)所示,d * 为系统输入的位置信号。
(6) $\left\{ \begin{align} & {{x}_{1}}\left( k+1 \right)={{x}_{1}}\left( k \right)+h{{x}_{2}}\left( k \right) \\ & {{x}_{2}}\left( k+1 \right)={{x}_{2}}\left( k \right)+hfhan\left( {{x}_{1}}\left( k \right)-{{d}^{*}}\left( k \right),{{x}_{2}}\left( k \right),\lambda,{{h}_{0}} \right) \\ \end{align} \right.$
式中,k 表示第k 个采样点;x 1 表示位置跟踪信号;x 2 表示x 1 的微分;h 表示采样步长;h 0 表示滤波因子;λ 表示速度因子;fhan 表示离散域最速控制综合函数,定义如式(7)所示
(7) $fhan\left( {{x}_{1}},{{x}_{2}},\lambda,{{h}_{0}} \right)=-\left\{ \begin{align} & \lambda sign\left( a \right)\left| a \right|>r \\ & \lambda \frac{a}{r}\left| a \right|\le r \\ \end{align} \right.$
(8) $\left\{ \begin{align} & r=\lambda {{h}_{0}} \\ & {{r}_{0}}=d{{h}_{0}} \\ & d={{x}_{1}}+{{h}_{0}}{{x}_{2}} \\ & {{a}_{0}}=\sqrt{{{r}^{2}}+8\lambda \left| d \right|} \\ \end{align} \right.$
(9) $a=\left\{ \begin{align} & {{x}_{2}}+\frac{{{a}_{0}}-r}{2}sign\left( d \right)\left| d \right|>{{r}_{0}} \\ & {{x}_{2}}+\frac{d}{h}\left| d \right|\le {{r}_{0}} \\ \end{align} \right.$
(2) 扩张状态观测器的设计。对于2阶被控对象,需要构建3阶扩张状态观测器,如式(10)所示
(10) $\left\{ \begin{align} & e\left( k \right)={{z}_{1}}\left( k \right)-d\left( k \right) \\ & {{z}_{1}}\left( k+1 \right)={{z}_{1}}\left( k \right)+h\left[ {{z}_{2}}\left( k \right)-{{\beta }_{1}}e\left( k \right) \right] \\ & {{z}_{2}}\left( k+1 \right)={{z}_{2}}\left( k \right)+h\left[ {{z}_{3}}\left( k \right)-{{\beta }_{2}}fal\left( e\left( k \right),{{\alpha }_{1}},\delta \right)+{{b}_{0}}u\left( k \right) \right] \\ & {{z}_{3}}\left( k+1 \right)={{z}_{3}}\left( k \right)-h{{\beta }_{3}}fal\left( e\left( k \right),{{\alpha }_{2}},\delta \right) \\ \end{align} \right.$
其中,$fal\left( e,\alpha,\delta \right)$
(11) $fal\left( e,\alpha,\delta \right)=\left\{ \begin{align} & \frac{e}{{{\delta }^{\alpha -1}}}\left| e \right|\le \delta \\ & {{\left| e \right|}^{\alpha }}sign\left( e \right)\left| e \right|>\delta \\ \end{align} \right.$
式中,e 表示观测误差;z 1 表示对输出位置信号的观测;z 2 表示对输出速度信号的观测;z 3 表示对总扰动的观测;b 0 为补偿因子,其值与电机内部参数有关,本文中${{b}_{0}}={3{{n}_{\text{p}}}\text{ }\!\!\pi\!\!\text{ }{{\psi }_{\text{PM}}}}/{2M\tau {{L}_{q}}}\;$ β 1 、β 2 、β 3 为输出误差校正增益;δ 表示线性区间宽度;α 表示为非线性因子。
(3) 非线性误差反馈控制律的设计。NLSEF设计如式(12)所示
(12) $\left\{ \begin{align} & {{e}_{1}}\left( k \right)={{x}_{1}}\left( k \right)-{{z}_{1}}\left( k \right) \\ & {{e}_{2}}\left( k \right)={{x}_{2}}\left( k \right)-{{z}_{2}}\left( k \right) \\ & {{u}_{0}}={{k}_{1}}fal\left( {{e}_{1}},{{\alpha }_{3}},\delta \right)+{{k}_{2}}\left( {{e}_{2}},{{\alpha }_{4}},\delta \right) \\ \end{align} \right.$
(13) $u={{u}_{0}}-\frac{{{z}_{3}}\left( k \right)}{b{}_{0}}$
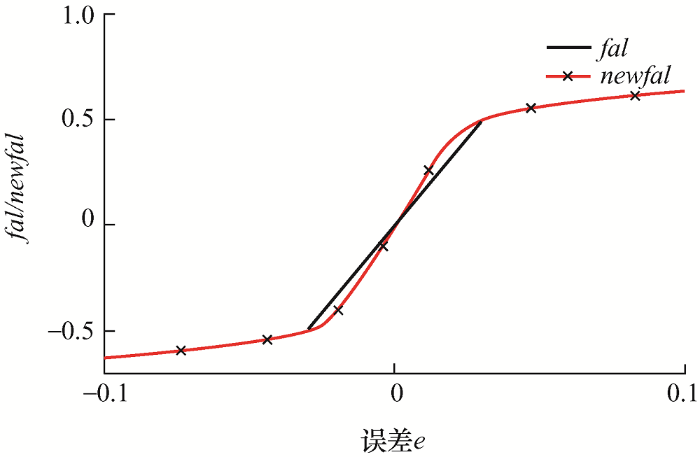
对自抗扰来说,非线性函数是各组成部分算法的核心,对系统的性能有着重大影响。目前,对于ESO和NLSEF来说,广泛使用的是非线性函数fal ,由式(11)可以看出,fal 函数是一个分段函数,并且以δ 点处为分界点,虽然在分界点处连续但是不可导,这就只能保证系统仅在线性区间内具有良好的性能,在实际系统中,为了具有更好的输出性能,δ 值一般都取得很小,这就导致了在δ 处导数的瞬间变化率突然变大,使系统容易产生高频振荡,这对系统的抗扰性来说是非常不利的。基于上述问题,需要设计一个光滑可导的非线性函数,以提高系统的抗扰性能。
当|e |>δ 时,新函数newfal 表达式和之前一样,|e |≤δ 时,令newfal 函数表达式如式(14)所示,并对式(14)进行插值拟合。
(14) $newfal\left( e,\alpha,\delta \right)=m\sin e+n{{e}^{2}}+t\tan e$
式中之所以用sine 来替代e ,tane 来替代e 3 ,是因为δ 值一般是小于1的。即0<δ <1,在这区间内,e 的平稳性没有sine 好,e 3 的收敛性没有tane 的好。对式(14)进行插值拟合,拟合的过程需要满足在区间内具有连续性和可导性这两个条件,如式(15)所示
(15) $\left\{ \begin{align} & newfal\left( e,\alpha,\delta \right)={{\delta }^{\alpha }}\ \ \ \ \ \ \ \ \ \ e=\delta \\ & newfal\left( e,\alpha,\delta \right)=-{{\delta }^{\alpha }}\ \ \ \ \ \ \ \ e=-\delta \\ & newfa{l}'\left( e,\alpha,\delta \right)=\alpha {{\delta }^{\alpha -1}}\ \ \ \ \ e=\delta \\ & newfa{l}'\left( e,\alpha,\delta \right)=\alpha {{\delta }^{\alpha -1}}\ \ \ \ \ e=-\delta \\ \end{align} \right.$
(16) $\left\{ \begin{align} & m=-\frac{{{\delta }^{\alpha -1}}\alpha \cdot {{\cos }^{2}}\delta \cdot \tan \delta -{{\delta }^{\alpha }}}{{{\sin }^{3}}\delta } \\ & n=0 \\ & t=-\frac{{{\delta }^{\alpha }}\cos \delta -{{\delta }^{\alpha -1}}\alpha \sin \delta }{{{\tan }^{2}}\delta \cdot \sin \delta } \\ \end{align} \right.$
(17) $newfal\left( e,\alpha,\delta \right)=\left\{ \begin{align} & {{\left| e \right|}^{\alpha }}sign\left( e \right)\left| e \right|>\delta \\ & -\frac{{{\delta }^{\alpha -1}}\alpha {{\cos }^{2}}\delta \cdot \tan \delta -{{\delta }^{\alpha }}}{{{\sin }^{3}}\delta }\cdot \sin e- \\ & \frac{{{\delta }^{\alpha }}\cos \delta -{{\delta }^{\alpha -1}}\alpha \cdot \sin \delta }{{{\tan }^{2}}\delta \cdot \sin \delta }\cdot \tan e\left| e \right|\le \delta \\ \end{align} \right.$
图2 是当α =0.2,δ =0.03时,newfal 与fal 函数的仿真图,由图2 可以明显看出,newfal 函数具有更好的光滑性和可导性。
图2
4 模糊神经网络同步补偿器的设计
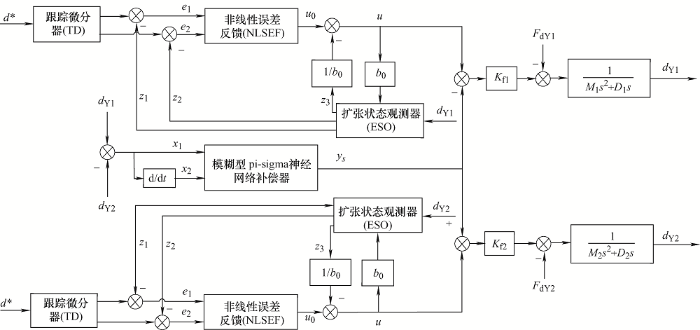
尽管ADRC可以有效地减小直驱H型平台单轴位置跟踪误差,但由于电机内部参数摄动,摩擦力扰动,X 轴上横梁的往复运动以及电机间的机械耦合等因素造成Y 轴上的两台电机动态不匹配。针对这种情况,本文设计模糊神经网络同步补偿器来实时估计同步误差量,并将该误差量进行分配补偿给各轴,以减小同步误差,从而保证H型运动平台的同步性能。基于自抗扰的H型平台模糊神经网络同步控制结构图如图3 所示。
图3
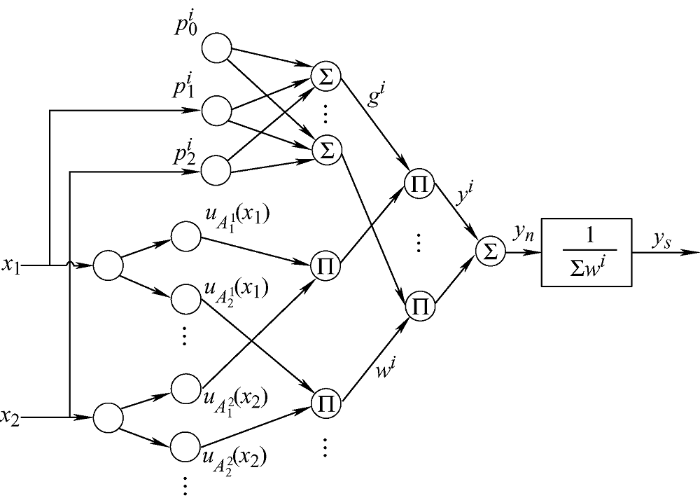
本文采用的是T-S模糊系统,所选的神经网络为pi-sigma神经网络。模糊型pi-sigma神经网络具有很强的自适应能力,对模糊模型也实现了自动更新,对模糊子集的隶属函数也进行不断修正[17 ⇓ -19 ] 。图4 为该模糊型pi-sigma神经网络的结构图。
图4
(1) 输入层:该层的神经元为输入神经元,本文选用的输入神经元个数为2,即两个输入变量,分别为Y 1 轴和Y 2 轴的同步误差x 1 以及同步误差的导数x 2 。
(2) 隶属函数层:隶属函数值表示输入变量对模糊集合的属于程度。隶属函数选择高斯函数。
(18) ${{u}_{A_{j}^{i}}}=\exp \left[ -{{\left( {{x}_{j}}-c_{j}^{i} \right)}^{2}}/b_{j}^{i} \right]$ j =1, 2;i =1, 2, ⋯, m
式中,$A_{j}^{i}$ j 层中第i 个神经元;$c_{j}^{i}$ $b_{j}^{i}$ xj 所对应的第i 个神经元所属高斯函数的平均值和偏差值;m 表示模糊规则的数目。
(3) 规则层和递归层:该层主要是模糊逻辑的推理,每个神经元表示模糊规则的预处理。第i 个神经元的输出为
(19) ${{w}^{i}}=\prod\limits_{j=1}^{2}{{{u}_{A_{j}^{i}}}\left( {{x}_{j}} \right)}$ j =1, 2;i =1, 2, ⋯, m
(20) ${{g}^{i}}=p_{0}^{i}+p_{1}^{i}{{x}_{1}}+p_{2}^{i}{{x}_{2}}$ i =1, 2,⋯, m
式中,$p_{j}^{i}$ i 个规则的结论参数取值。
(4) 推论层:该层神经元是规则层wi 和递归层gi 的乘积。
(21) ${{y}^{i}}={{w}^{i}}{{g}^{i}}$ i =1, 2, ⋯, m
(5) 输出层:该层的主要作用是解模糊化,此层输出的是补偿器的补偿量。
(22) ${{y}_{s}}=\frac{\sum\limits_{i=1}^{m}{{{y}^{i}}}}{\sum\limits_{i=1}^{m}{{{w}^{i}}}}=\frac{\sum\limits_{i=1}^{m}{{{w}^{i}}{{g}^{i}}}}{\sum\limits_{i=1}^{m}{{{w}^{i}}}}$ i =1, 2, ⋯, m
本文中模糊型pi-sigma神经网络的参数学习算法选用的是梯度下降法,参数学习过程是使目标能量函数取得最小值,目标能量函数定义为
(23) $E=\frac{1}{2}{{\left( {{d}_{\text{Y1}}}-{{d}_{\text{Y2}}} \right)}^{2}}\text{=}\frac{1}{2}{{e}_{s}}^{2}$
(24) $p_{j}^{i}\left( k \right)=p_{j}^{i}\left( k-1 \right)-\alpha \frac{\partial E}{\partial p_{j}^{i}}$
(25) $\frac{\partial E}{\partial p_{j}^{i}}=\frac{\partial E}{\partial {{y}_{s}}}\frac{\partial {{y}_{s}}}{\partial p_{j}^{i}}=-{{e}_{s}}\frac{\partial \left[ \frac{\sum\limits_{i=1}^{m}{{{w}^{i}}{{g}^{i}}}}{\sum\limits_{i=1}^{m}{{{w}^{i}}}} \right]}{\partial p_{j}^{i}}=-{{e}_{s}}\frac{{{w}^{i}}}{\sum\limits_{i=1}^{m}{{{w}^{i}}}}\frac{\partial {{g}^{i}}}{\partial p_{j}^{i}}$
(26) $p_{j}^{i}\left( k \right)=p_{j}^{i}\left( k-1 \right)-\alpha \frac{\partial E}{\partial p_{j}^{i}}=p_{j}^{i}\left( k-1 \right)+\alpha {{e}_{s}}\frac{{{w}^{i}}}{\sum\limits_{i=1}^{m}{{{w}^{i}}}}{{x}_{j}}$
(27) $c_{j}^{i}\left( k \right)=c_{j}^{i}\left( k-1 \right)-\beta \frac{\partial E}{\partial p_{j}^{i}}$
(28) $b_{j}^{i}\left( k \right)=b_{j}^{i}\left( k-1 \right)-\beta \frac{\partial E}{\partial b_{j}^{i}}$
(29) $\frac{\partial E}{\partial c_{j}^{i}}=\frac{\partial E}{\partial {{y}_{s}}}\frac{\partial {{y}_{s}}}{\partial c_{j}^{i}}=\frac{\partial E}{\partial {{y}_{s}}}\frac{\partial {{y}_{s}}}{\partial {{w}^{i}}}\frac{\partial {{w}^{i}}}{\partial c_{j}^{i}}=\frac{\partial E}{\partial {{y}_{s}}}\frac{\partial {{y}_{s}}}{\partial {{w}^{i}}}\frac{\partial {{w}^{i}}}{\partial {{u}_{A_{j}^{i}}}}\frac{\partial {{u}_{A_{j}^{i}}}}{\partial c_{j}^{i}}=$ $-{{e}_{s}}\frac{{{g}^{i}}\sum\limits_{i=1}^{m}{{{w}^{i}}}-\sum\limits_{i=1}^{m}{\left( {{w}^{i}}{{g}^{i}} \right)}}{{{\left( \sum\limits_{i=1}^{m}{{{w}^{i}}} \right)}^{2}}}2\left( {{x}_{j}}-c_{j}^{i} \right)\frac{{{w}^{i}}}{b_{j}^{i}}$
(30) $\begin{matrix} \frac{\partial E}{\partial b_{j}^{i}}=\frac{\partial E}{\partial {{y}_{s}}}\cdot \frac{\partial {{y}_{s}}}{\partial b_{j}^{i}}=\frac{\partial E}{\partial {{y}_{s}}}\cdot \frac{\partial {{y}_{s}}}{\partial {{w}^{i}}}\cdot \frac{\partial {{w}^{i}}}{\partial b_{j}^{i}}= \\ -{{e}_{s}}\frac{{{g}^{i}}\sum\limits_{i=1}^{m}{{{w}^{i}}}-\sum\limits_{i=1}^{m}{\left( {{w}^{i}}{{g}^{i}} \right)}}{{{\left( \sum\limits_{i=1}^{m}{{{w}^{i}}} \right)}^{2}}}\cdot {{w}^{i}}\left[ -{{\left( {{x}_{j}}-c_{j}^{i} \right)}^{2}} \right]\left( -\frac{1}{{{\left( b_{j}^{i} \right)}^{2}}} \right) \\ \end{matrix}$
5 仿真与结果分析
为了验证本文提出策略的可行性,与双轴间不加模糊型pi-sigma神经网络的同步补偿器在Matlab/Simulink环境下进行仿真对比。H型平台的各部分参数如下所示:M 1 =M 2 =8.2 kg,n p =1,τ =32 mm,L d =L q =8.2 mH,Ψ PM =0.09 Wb,D 1 =D 2 =8.0 N·s/m,K f1 =K f2 =13.3 N/A。自抗扰控制器的各部分参数如下所示:h =0.001,λ =650,h 0 =0.001,α 1 =0.5,α 2 =0.25,δ =0.03,β 1 =5 000,β 2 =9.5e 4 ,β 3 =1e 6 ,k 1 =2e 6 ,k 2 =3e 3 ,α 3 =0.75,α 4 =1.25。模糊神经网络补偿器的各部分参数如下所示:m =9,α =0.05,η =0.75。
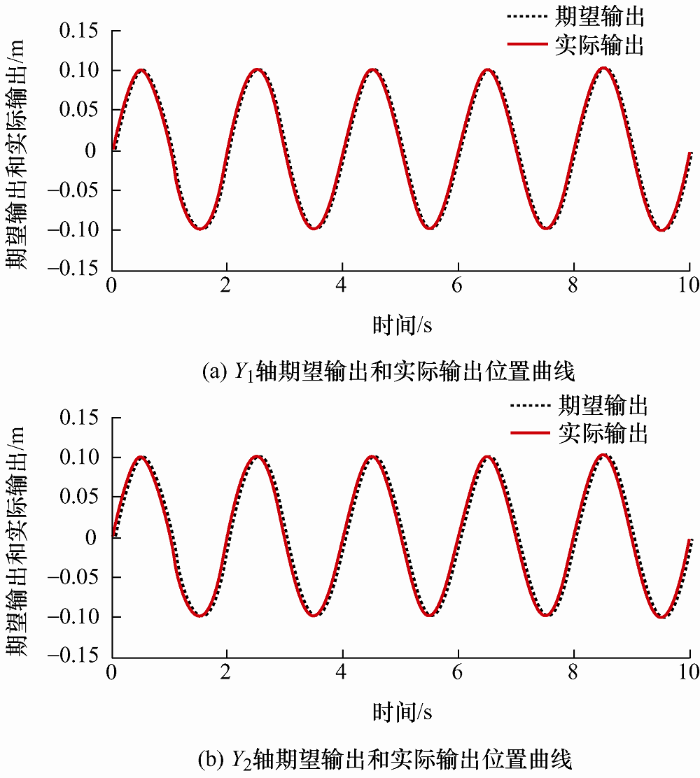
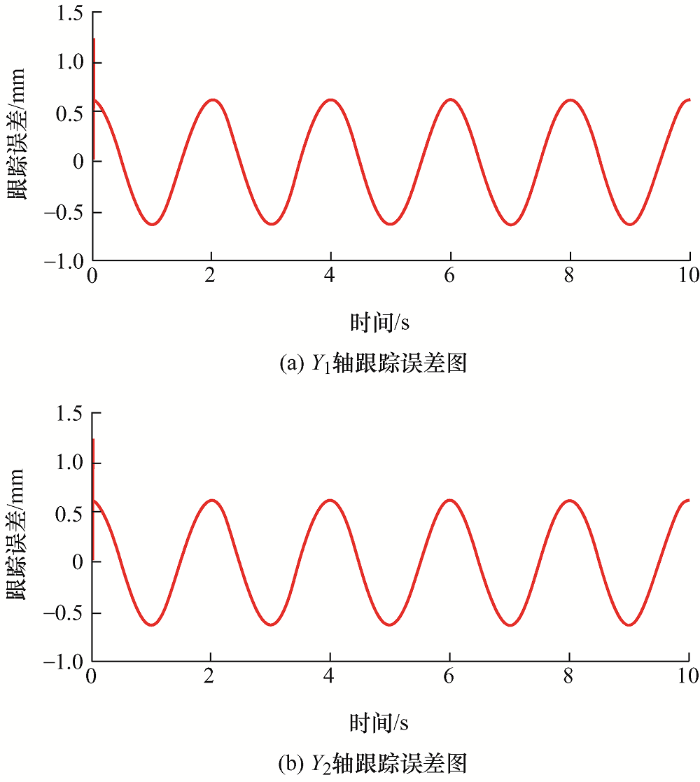
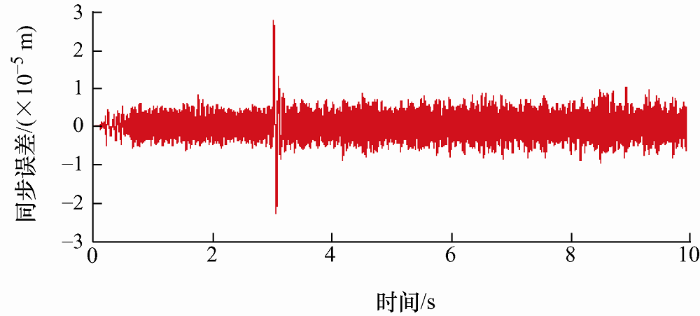
为了验证本文提出控制策略的抗扰性能,在3 s时分别对各轴突加一个32 N的阶跃负载扰动,输入信号采用幅值0.1 m、周期为2的正弦位置信号,图5 ~7 分别表示直驱H型平台单轴采用ADRC控制下的期望输出和实际输出图,跟踪误差图和同步误差图。
图5
图6
图7
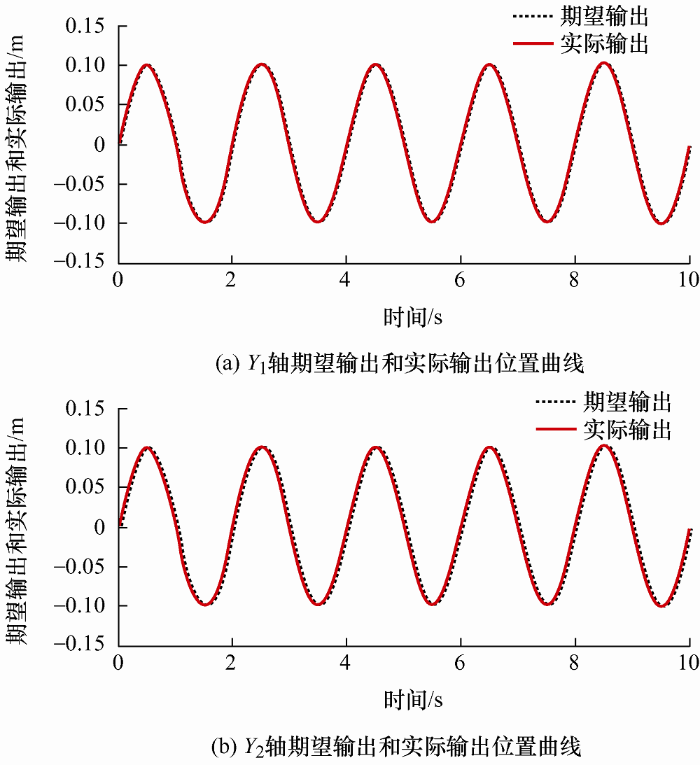
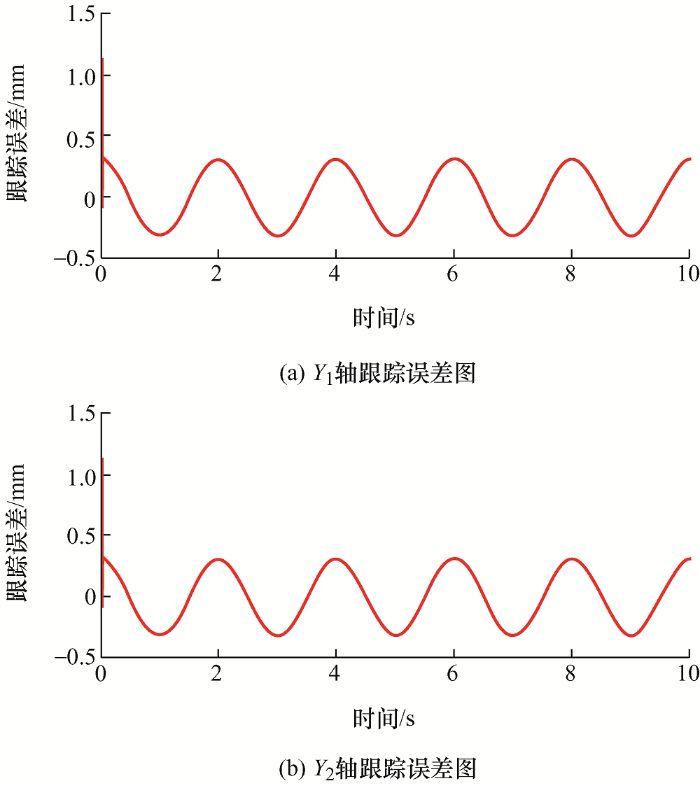
在相同的位置输入信号下进行第二组仿真试验,图8 ~10 分别表示直驱H型平台单轴采用ADRC控制、双轴间采用模糊型pi-sigma神经网络同步补偿器控制的期望输出和实际输出图,跟踪误差图和同步误差图。
图8
图9
图10
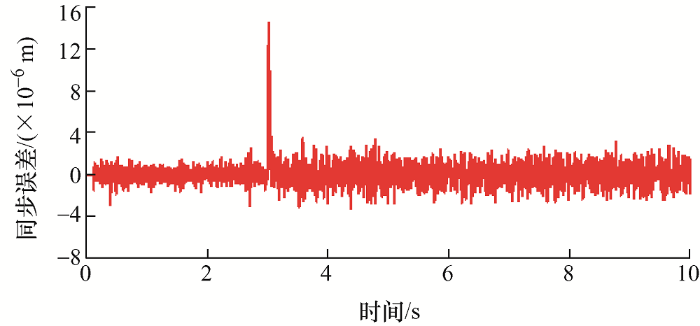
图10
基于自抗扰的H型平台模糊型pi-sigma神经网络同步误差图
图6 和图9 分别是在两种控制策略下得到的跟踪误差图,当系统趋于稳定后,第一种控制策略将跟踪误差限定在-6×10-4 ~6×10-4 m,第二种控制策略将跟踪误差限定在-3.2×10-4 ~3.2×10-4 m,可以明显看出,第二种控制策略跟踪精度更高。图7 和图10 是在两种控制策略下的同步误差图,由于在3 s时施加了32 N的负载扰动,两种控制策略在3 s时同步误差都有明显的增大,第一种控制策略下的最大同步误差达到28 μm,当系统稳定后,同步误差限定在-10~10 μm。在相同的试验条件下,第二种控制策略的最大误差达到14.5 μm,当系统稳定后,同步误差限定在-3.5~3.5 μm,显而易见,第二种控制策略的同步误差更小,抗扰性更强。
6 结论
为了满足直驱H型平台控制精度的要求,需要减小H型平台的单轴跟踪误差和双轴间的同步误差,以保证系统的同步进给。本文提出了将自抗扰控制和模糊型pi-sigma神经网络补偿器相结合的控制策略,并得出以下结论。
(1) 传统自抗扰位置控制器中的非线性函数fal 是一个分段函数,在分界点δ 处连续但不可导,此时系统容易产生高频振荡。因此,本文通过插值拟合得到一个连续可导的非线性函数newfal 。
(2) 为了减小系统的同步误差,将模糊控制和神经网络控制相结合,设计了模糊型pi-sigma神经网络补偿器,利用模糊神经网络较强的学习能力以及对任意非线性函数的逼近能力,使同步误差趋近于零,并通过梯度下降法对模糊神经网络中的参数实时修正,实现系统的动态补偿。从仿真结果可以看出,该控制策略提高了系统的同步精度和抗扰性。
参考文献
View Option
[1]
滕伟 , 柳亦兵 , 穆海华 . 光刻机工作台超精密运动与同步控制
[J]. 机械工程学报 , 2011 , 47 (11 ):185 -190 .
[本文引用: 1]
以同步扫描的运动性能为目标,研究针对步进扫描投影光刻机工作台的超精密运动与同步控制策略。结合工作台的结构特点,提出一种粗、微复合运动控制方法,即:微动台纳米级微动,粗动台微米级跟随运动;以硅片台、掩模台的三阶轨迹规划与轨迹重叠为基础,进行扫描过程中的同步状态规划;为实现纳米级的同步运动精度,进行硅片台与掩模台的动态特性比较,在此基础上提出工作台交叉反馈的同步控制策略,使掩模台实时跟踪硅片台的运动趋势,并设计同步误差模型进行运动性能评估。该方法已在100 nm步进扫描投影光刻机中得到实际应用,并取得良好效果。
TENG Wei LIU Yibing MU Haihua . Ultra-precision motion control and synchronization control for stage of lithography
[J]. Journal of Mechanical Engineering , 2011 , 47 (11 ):185 -190 .
[本文引用: 1]
A strategy of ultra-precision motion control and synchronization control for stage of step & scan lithography is studied, aiming at the motion performance of synchronization scan. Considering the stage structure, a control method based on rough-fine motion is presented, which is described as: fine-motion stage moves nanometer level and rough-motion stage follows at micrometer level. The synchronization state of stage during scanning is planned based on the 3rd trajectory planning and trajectory overlapping. To realize the synchronous motion precision of nanometer level, a cross-feedback control strategy is proposed which makes the retile stage track the wafer stage motion trend based on the difference of dynamic characteristic between wafer stage and retile stage, and also a synchronous error model is designed to evaluate the motion performance of stage. The control method proposed is applied in 100 nm step & scan projection lithography and obtains good results.
[2]
罗品奎 , 金建新 . 双直线电机驱动的H型运动平台同步控制研究
[J]. 机械制造与自动化 , 2013 , 42 (6 ):158 -161 .
[本文引用: 1]
LUO Pinkui JIN Jianxin . Research on dual linear motor synchronous control in H-type stage
[J]. Mechanical Manufacturing and Automation , 2013 , 42 (6 ):158 -161 .
[本文引用: 1]
[3]
CHEN C S LEE C F CHOU P H , et al . T-S fuzzy tracking and synchronous control in a gantry stage [C]// IEEE International Conference on Fuzzy Systems,IEEE, 2011 :1844 -1851 .
[本文引用: 1]
[4]
张康 , 王丽梅 . 基于融合误差的直驱H型平台自适应全局滑模轮廓控制
[J]. 中国电机工程学报 , 2020 , 40 (16 ):5337 -5345 .
[本文引用: 1]
ZHANG Kang WANG Limei . Adaptive global sliding mode contour control of direct drive H-type platform based on integrated error
[J]. Proceedings of the CSEE , 2020 , 40 (16 ):5337 -5345 .
[本文引用: 1]
[5]
金鸿雁 , 赵希梅 . 永磁直线伺服系统递归小波Elman神经网络互补滑模控制
[J]. 电机与控制学报 , 2019 , 23 (10 ):102 -109 .
[本文引用: 1]
JIN Hongyan ZHAO Ximei . Wavelet-based Elman neural network complementary sliding mode control for permanent magnet linear servo system
[J]. Electric Machines and Control , 2019 , 23 (10 ):102 -109 .
[本文引用: 1]
[6]
钱振宇 . 圆筒型永磁同步直线电机伺服系统的扰动抑制研究 [D]. 南京 : 南京航空航天大学 , 2019 .
[本文引用: 1]
QIAN Zhenyu . Study on disturbance suppression of the tubular permanent magnet synchronous linear motor servo system [D]. Nanjing : Nanjing University of Aeronautics and Astronautics , 2019 .
[本文引用: 1]
[7]
SIRA-RAMIREZ H LINARES-FLORES J GARCIA-RODRIGUEZ C , et al . On the control of the permanent magnet synchronous motor:An active disturbance rejection control approach
[J]. IEEE Transactions on Control Systems Technology , 2014 , 22 (5 ):2056 -2063 .
DOI:10.1109/TCST.2014.2298238
URL
[本文引用: 1]
[8]
邱建琪 , 留若宸 . 永磁同步电机位置伺服系统改进自抗扰控制
[J]. 电机与控制学报 , 2019 , 23 (11 ):42 -50 .
[本文引用: 1]
QIU Jianqi LIU Ruochen . Improved active disturbance rejection control for permanent magnet synchronous motor position servo system
[J]. Electric Machines and Control , 2019 , 23 (11 ):42 -50 .
[本文引用: 1]
[9]
朱进权 , 葛琼璇 . 基于自抗扰和负载功率前馈的高速磁悬浮系统PWM整流器控制策略
[J]. 电工技术学报 , 2021 , 36 (2 ):320 -329 .
[本文引用: 1]
ZHU Jinquan GE Qiongxuan . Control strategy for PWM rectifier of high-speed maglev based on active disturbance rejection control and load power feed-forward
[J]. Transactions of China Electrotechnical Society , 2021 , 36 (2 ):320 -329 .
[本文引用: 1]
[10]
孙斌 , 王海霞 . 永磁同步电机调速系统非线性自抗扰控制器设计与参数整定
[J]. 中国电机工程学报 , 2020 , 40 (20 ):6715 -6726 .
[本文引用: 1]
SUN Bin WANG Haixia . Nonlinear active disturbance rejection controller design and tuning for permanent magnet synchronous motor speed control system
[J]. Proceedings of the CSEE , 2020 , 40 (20 ):6715 -6726 .
[本文引用: 1]
[11]
CHEN S Y LEE C Y . Compensatory fuzzy neural network control with dynamic parameters estimation for linear voice coil actuator-science direct
[J]. Precision Engineering , 2017 , 48 :191 -202 .
DOI:10.1016/j.precisioneng.2016.12.002
URL
[本文引用: 1]
[12]
王丽梅 , 张宗雪 . H型精密运动平台交叉耦合模糊PID同步控制
[J]. 沈阳工业大学学报 , 2018 , 40 (1 ):1 -5 .
[本文引用: 1]
WANG Limei ZHANG Zongxue . Cross-coupled fuzzy PID synchronous control for H-type precision motion platform
[J]. Journal of Shenyang University of Technology , 2018 , 40 (1 ):1 -5 .
[本文引用: 1]
[13]
KOREN Y . Cross-coupled biaxial computer control for manufacturing systems
[J]. Journal of Dynamic Systems,Measurement,and Control , 1980 , 102 (4 ):265 -272 .
DOI:10.1115/1.3149612
URL
[本文引用: 1]
[14]
金鸿雁 , 赵希梅 . 双直线电机伺服系统Elman神经网络互补滑模交叉耦合同步控制
[J]. 电工技术学报 , 2018 , 33 (21 ):4971 -4978 .
[本文引用: 1]
JIN Hongyan ZHAO Ximei . Synchronization control of Elman neural network complementary sliding mode and cross-coupled control for dual linear motors servo system
[J]. Transactions of China Electrotechnical Society , 2018 , 33 (21 ):4971 -4978 .
[本文引用: 1]
[15]
王丽梅 , 么红岩 , 张康 . 直接驱动H型平台鲁棒最优同步控制仿真研究
[J]. 系统仿真学报 , 2022 , 34 (3 ):527 -535 .
DOI:10.16182/j.issn1004731x.joss.20-0831
[本文引用: 1]
针对永磁直线同步电机直接驱动的H型运动平台存在双轴耦合、参数摄动及外部扰动等不确定因素,影响系统的同步控制精度和鲁棒性的问题,提出了一种基于H型运动平台耦合动力学模型的鲁棒最优同步控制方法。基于Euler-Lagrange方程,建立双轴耦合动力学模型;设计交叉耦合同步控制器,有效地将单轴跟踪误差与双轴同步误差及其变化率结合起来;设计H∞鲁棒最优同步控制器来克服参数摄动及外部扰动等不确定因素的影响,增强系统的鲁棒性。通过仿真实验证明了该方法的有效性。
WANG Limei YAO Hongyan ZHANG Kang . Simulation of robust optimal synchronization control for direct drive H-type motion platform
[J]. Journal of System Simulation , 2022 , 34 (3 ):527 -535 .
DOI:10.16182/j.issn1004731x.joss.20-0831
[本文引用: 1]
A robust optimal synchronization control method based on coupling dynamics model of the H-type motion platform is proposed for the problem that the H-type motion platform driven directly by permanent magnet linear synchronous motor has uncertainties such as biaxial coupling, parameter perturbation and external disturbances, which affect the synchronization control accuracy and robustness of the system. A biaxial coupling dynamics model is established based on Euler-Lagrange equation. The cross coupling synchronization controller is designed to effectively combine the single-axis tracking error with the biaxial synchronization error and its rate of change. TheH∞robust optimal synchronous controller is designed to overcome the influence of uncertain factors such as parameter perturbation and external disturbances to enhance the robustness of the system. The effectiveness of the method is demonstrated by simulation experiments.
[16]
楼成林 . 基于自适应神经网络的多电机同步控制策略研究 [D]. 杭州 : 浙江工业大学 , 2019 .
[本文引用: 1]
LOU Chenglin . Research on multi-motor synchronization control strategy based on adaptive neural network [D]. Hangzhou : Zhejiang University of Technology , 2019 .
[本文引用: 1]
[17]
BAS E GROSAN C EGRIOGLU E , et al . High order fuzzy time series method based on pi-sigma neural network
[J]. Engineering Applications of Artificial Intelligence , 2018 , 72 :350 -356 .
DOI:10.1016/j.engappai.2018.04.017
URL
[本文引用: 1]
[18]
聂永 . Pi-Sigma神经网络的学习算法研究 [D]. 苏州 : 苏州大学 , 2008 .
[本文引用: 1]
NIE Yong . Research on Pi-Sigma neural networks learning algorithms [D]. Suzhou : Suzhou University , 2008 .
[本文引用: 1]
[19]
XU Rui ZHOU Miaolei . A self-adaption compensation control for hysteresis nonlinearity in piezo-actuated stages based on Pi-sigma fuzzy neural network
[J]. Smart Material Structures , 2018 , 27 (4 ):0450 02.
[本文引用: 1]
光刻机工作台超精密运动与同步控制
1
2011
... H型运动平台是由三台永磁直线同步电机组成的三轴控制系统,具有推力大、定位精度高、响应速度快等优点,广泛应用于数控机床、机械加工等领域[1 -2 ] .但系统在运行过程中,受到机械耦合、参数摄动、外部扰动等影响,造成平行轴上的两台电机动态不匹配,从而降低系统的同步精度.因此,如何减小这些因素对H型平台伺服系统同步性能的影响,进一步提高系统的同步精度,是目前直驱H型平台所需要解决的问题[3 -4 ] . ...
Ultra-precision motion control and synchronization control for stage of lithography
1
2011
... H型运动平台是由三台永磁直线同步电机组成的三轴控制系统,具有推力大、定位精度高、响应速度快等优点,广泛应用于数控机床、机械加工等领域[1 -2 ] .但系统在运行过程中,受到机械耦合、参数摄动、外部扰动等影响,造成平行轴上的两台电机动态不匹配,从而降低系统的同步精度.因此,如何减小这些因素对H型平台伺服系统同步性能的影响,进一步提高系统的同步精度,是目前直驱H型平台所需要解决的问题[3 -4 ] . ...
双直线电机驱动的H型运动平台同步控制研究
1
2013
... H型运动平台是由三台永磁直线同步电机组成的三轴控制系统,具有推力大、定位精度高、响应速度快等优点,广泛应用于数控机床、机械加工等领域[1 -2 ] .但系统在运行过程中,受到机械耦合、参数摄动、外部扰动等影响,造成平行轴上的两台电机动态不匹配,从而降低系统的同步精度.因此,如何减小这些因素对H型平台伺服系统同步性能的影响,进一步提高系统的同步精度,是目前直驱H型平台所需要解决的问题[3 -4 ] . ...
Research on dual linear motor synchronous control in H-type stage
1
2013
... H型运动平台是由三台永磁直线同步电机组成的三轴控制系统,具有推力大、定位精度高、响应速度快等优点,广泛应用于数控机床、机械加工等领域[1 -2 ] .但系统在运行过程中,受到机械耦合、参数摄动、外部扰动等影响,造成平行轴上的两台电机动态不匹配,从而降低系统的同步精度.因此,如何减小这些因素对H型平台伺服系统同步性能的影响,进一步提高系统的同步精度,是目前直驱H型平台所需要解决的问题[3 -4 ] . ...
1
2011
... H型运动平台是由三台永磁直线同步电机组成的三轴控制系统,具有推力大、定位精度高、响应速度快等优点,广泛应用于数控机床、机械加工等领域[1 -2 ] .但系统在运行过程中,受到机械耦合、参数摄动、外部扰动等影响,造成平行轴上的两台电机动态不匹配,从而降低系统的同步精度.因此,如何减小这些因素对H型平台伺服系统同步性能的影响,进一步提高系统的同步精度,是目前直驱H型平台所需要解决的问题[3 -4 ] . ...
基于融合误差的直驱H型平台自适应全局滑模轮廓控制
1
2020
... H型运动平台是由三台永磁直线同步电机组成的三轴控制系统,具有推力大、定位精度高、响应速度快等优点,广泛应用于数控机床、机械加工等领域[1 -2 ] .但系统在运行过程中,受到机械耦合、参数摄动、外部扰动等影响,造成平行轴上的两台电机动态不匹配,从而降低系统的同步精度.因此,如何减小这些因素对H型平台伺服系统同步性能的影响,进一步提高系统的同步精度,是目前直驱H型平台所需要解决的问题[3 -4 ] . ...
Adaptive global sliding mode contour control of direct drive H-type platform based on integrated error
1
2020
... H型运动平台是由三台永磁直线同步电机组成的三轴控制系统,具有推力大、定位精度高、响应速度快等优点,广泛应用于数控机床、机械加工等领域[1 -2 ] .但系统在运行过程中,受到机械耦合、参数摄动、外部扰动等影响,造成平行轴上的两台电机动态不匹配,从而降低系统的同步精度.因此,如何减小这些因素对H型平台伺服系统同步性能的影响,进一步提高系统的同步精度,是目前直驱H型平台所需要解决的问题[3 -4 ] . ...
永磁直线伺服系统递归小波Elman神经网络互补滑模控制
1
2019
... 直线电机采用的是直接驱动的方式,其容易受负载扰动、摩擦力以及外部等不确定扰动的影响[5 ] .针对扰动问题,文献[6 ]采用建立扰动模型的方法对圆筒型永磁直线同步电机伺服系统的扰动进行抑制,但事实上扰动很难用实际模型描述出来,所以,扰动抑制效果并不理想.自抗扰控制不依赖于被控对象的具体数学模型,通过对系统内外扰动进行统一观测、补偿,以提高系统的抗扰能力,使系统具有很强的鲁棒性[7 -8 ] .文献[9 ]针对高速磁悬浮系统中负载扰动对三相PWM直流侧的输出电压造成影响,采用自抗扰对磁悬浮系统的负载扰动进行观测和抑制,以提高系统的鲁棒性.文献[10 ]基于自抗扰对扰动的监测和补偿,有效地解决了永磁同步电机在低速时容易受到扰动影响的问题,提高了系统的抗扰性. ...
Wavelet-based Elman neural network complementary sliding mode control for permanent magnet linear servo system
1
2019
... 直线电机采用的是直接驱动的方式,其容易受负载扰动、摩擦力以及外部等不确定扰动的影响[5 ] .针对扰动问题,文献[6 ]采用建立扰动模型的方法对圆筒型永磁直线同步电机伺服系统的扰动进行抑制,但事实上扰动很难用实际模型描述出来,所以,扰动抑制效果并不理想.自抗扰控制不依赖于被控对象的具体数学模型,通过对系统内外扰动进行统一观测、补偿,以提高系统的抗扰能力,使系统具有很强的鲁棒性[7 -8 ] .文献[9 ]针对高速磁悬浮系统中负载扰动对三相PWM直流侧的输出电压造成影响,采用自抗扰对磁悬浮系统的负载扰动进行观测和抑制,以提高系统的鲁棒性.文献[10 ]基于自抗扰对扰动的监测和补偿,有效地解决了永磁同步电机在低速时容易受到扰动影响的问题,提高了系统的抗扰性. ...
1
2019
... 直线电机采用的是直接驱动的方式,其容易受负载扰动、摩擦力以及外部等不确定扰动的影响[5 ] .针对扰动问题,文献[6 ]采用建立扰动模型的方法对圆筒型永磁直线同步电机伺服系统的扰动进行抑制,但事实上扰动很难用实际模型描述出来,所以,扰动抑制效果并不理想.自抗扰控制不依赖于被控对象的具体数学模型,通过对系统内外扰动进行统一观测、补偿,以提高系统的抗扰能力,使系统具有很强的鲁棒性[7 -8 ] .文献[9 ]针对高速磁悬浮系统中负载扰动对三相PWM直流侧的输出电压造成影响,采用自抗扰对磁悬浮系统的负载扰动进行观测和抑制,以提高系统的鲁棒性.文献[10 ]基于自抗扰对扰动的监测和补偿,有效地解决了永磁同步电机在低速时容易受到扰动影响的问题,提高了系统的抗扰性. ...
1
2019
... 直线电机采用的是直接驱动的方式,其容易受负载扰动、摩擦力以及外部等不确定扰动的影响[5 ] .针对扰动问题,文献[6 ]采用建立扰动模型的方法对圆筒型永磁直线同步电机伺服系统的扰动进行抑制,但事实上扰动很难用实际模型描述出来,所以,扰动抑制效果并不理想.自抗扰控制不依赖于被控对象的具体数学模型,通过对系统内外扰动进行统一观测、补偿,以提高系统的抗扰能力,使系统具有很强的鲁棒性[7 -8 ] .文献[9 ]针对高速磁悬浮系统中负载扰动对三相PWM直流侧的输出电压造成影响,采用自抗扰对磁悬浮系统的负载扰动进行观测和抑制,以提高系统的鲁棒性.文献[10 ]基于自抗扰对扰动的监测和补偿,有效地解决了永磁同步电机在低速时容易受到扰动影响的问题,提高了系统的抗扰性. ...
On the control of the permanent magnet synchronous motor:An active disturbance rejection control approach
1
2014
... 直线电机采用的是直接驱动的方式,其容易受负载扰动、摩擦力以及外部等不确定扰动的影响[5 ] .针对扰动问题,文献[6 ]采用建立扰动模型的方法对圆筒型永磁直线同步电机伺服系统的扰动进行抑制,但事实上扰动很难用实际模型描述出来,所以,扰动抑制效果并不理想.自抗扰控制不依赖于被控对象的具体数学模型,通过对系统内外扰动进行统一观测、补偿,以提高系统的抗扰能力,使系统具有很强的鲁棒性[7 -8 ] .文献[9 ]针对高速磁悬浮系统中负载扰动对三相PWM直流侧的输出电压造成影响,采用自抗扰对磁悬浮系统的负载扰动进行观测和抑制,以提高系统的鲁棒性.文献[10 ]基于自抗扰对扰动的监测和补偿,有效地解决了永磁同步电机在低速时容易受到扰动影响的问题,提高了系统的抗扰性. ...
永磁同步电机位置伺服系统改进自抗扰控制
1
2019
... 直线电机采用的是直接驱动的方式,其容易受负载扰动、摩擦力以及外部等不确定扰动的影响[5 ] .针对扰动问题,文献[6 ]采用建立扰动模型的方法对圆筒型永磁直线同步电机伺服系统的扰动进行抑制,但事实上扰动很难用实际模型描述出来,所以,扰动抑制效果并不理想.自抗扰控制不依赖于被控对象的具体数学模型,通过对系统内外扰动进行统一观测、补偿,以提高系统的抗扰能力,使系统具有很强的鲁棒性[7 -8 ] .文献[9 ]针对高速磁悬浮系统中负载扰动对三相PWM直流侧的输出电压造成影响,采用自抗扰对磁悬浮系统的负载扰动进行观测和抑制,以提高系统的鲁棒性.文献[10 ]基于自抗扰对扰动的监测和补偿,有效地解决了永磁同步电机在低速时容易受到扰动影响的问题,提高了系统的抗扰性. ...
Improved active disturbance rejection control for permanent magnet synchronous motor position servo system
1
2019
... 直线电机采用的是直接驱动的方式,其容易受负载扰动、摩擦力以及外部等不确定扰动的影响[5 ] .针对扰动问题,文献[6 ]采用建立扰动模型的方法对圆筒型永磁直线同步电机伺服系统的扰动进行抑制,但事实上扰动很难用实际模型描述出来,所以,扰动抑制效果并不理想.自抗扰控制不依赖于被控对象的具体数学模型,通过对系统内外扰动进行统一观测、补偿,以提高系统的抗扰能力,使系统具有很强的鲁棒性[7 -8 ] .文献[9 ]针对高速磁悬浮系统中负载扰动对三相PWM直流侧的输出电压造成影响,采用自抗扰对磁悬浮系统的负载扰动进行观测和抑制,以提高系统的鲁棒性.文献[10 ]基于自抗扰对扰动的监测和补偿,有效地解决了永磁同步电机在低速时容易受到扰动影响的问题,提高了系统的抗扰性. ...
基于自抗扰和负载功率前馈的高速磁悬浮系统PWM整流器控制策略
1
2021
... 直线电机采用的是直接驱动的方式,其容易受负载扰动、摩擦力以及外部等不确定扰动的影响[5 ] .针对扰动问题,文献[6 ]采用建立扰动模型的方法对圆筒型永磁直线同步电机伺服系统的扰动进行抑制,但事实上扰动很难用实际模型描述出来,所以,扰动抑制效果并不理想.自抗扰控制不依赖于被控对象的具体数学模型,通过对系统内外扰动进行统一观测、补偿,以提高系统的抗扰能力,使系统具有很强的鲁棒性[7 -8 ] .文献[9 ]针对高速磁悬浮系统中负载扰动对三相PWM直流侧的输出电压造成影响,采用自抗扰对磁悬浮系统的负载扰动进行观测和抑制,以提高系统的鲁棒性.文献[10 ]基于自抗扰对扰动的监测和补偿,有效地解决了永磁同步电机在低速时容易受到扰动影响的问题,提高了系统的抗扰性. ...
Control strategy for PWM rectifier of high-speed maglev based on active disturbance rejection control and load power feed-forward
1
2021
... 直线电机采用的是直接驱动的方式,其容易受负载扰动、摩擦力以及外部等不确定扰动的影响[5 ] .针对扰动问题,文献[6 ]采用建立扰动模型的方法对圆筒型永磁直线同步电机伺服系统的扰动进行抑制,但事实上扰动很难用实际模型描述出来,所以,扰动抑制效果并不理想.自抗扰控制不依赖于被控对象的具体数学模型,通过对系统内外扰动进行统一观测、补偿,以提高系统的抗扰能力,使系统具有很强的鲁棒性[7 -8 ] .文献[9 ]针对高速磁悬浮系统中负载扰动对三相PWM直流侧的输出电压造成影响,采用自抗扰对磁悬浮系统的负载扰动进行观测和抑制,以提高系统的鲁棒性.文献[10 ]基于自抗扰对扰动的监测和补偿,有效地解决了永磁同步电机在低速时容易受到扰动影响的问题,提高了系统的抗扰性. ...
永磁同步电机调速系统非线性自抗扰控制器设计与参数整定
1
2020
... 直线电机采用的是直接驱动的方式,其容易受负载扰动、摩擦力以及外部等不确定扰动的影响[5 ] .针对扰动问题,文献[6 ]采用建立扰动模型的方法对圆筒型永磁直线同步电机伺服系统的扰动进行抑制,但事实上扰动很难用实际模型描述出来,所以,扰动抑制效果并不理想.自抗扰控制不依赖于被控对象的具体数学模型,通过对系统内外扰动进行统一观测、补偿,以提高系统的抗扰能力,使系统具有很强的鲁棒性[7 -8 ] .文献[9 ]针对高速磁悬浮系统中负载扰动对三相PWM直流侧的输出电压造成影响,采用自抗扰对磁悬浮系统的负载扰动进行观测和抑制,以提高系统的鲁棒性.文献[10 ]基于自抗扰对扰动的监测和补偿,有效地解决了永磁同步电机在低速时容易受到扰动影响的问题,提高了系统的抗扰性. ...
Nonlinear active disturbance rejection controller design and tuning for permanent magnet synchronous motor speed control system
1
2020
... 直线电机采用的是直接驱动的方式,其容易受负载扰动、摩擦力以及外部等不确定扰动的影响[5 ] .针对扰动问题,文献[6 ]采用建立扰动模型的方法对圆筒型永磁直线同步电机伺服系统的扰动进行抑制,但事实上扰动很难用实际模型描述出来,所以,扰动抑制效果并不理想.自抗扰控制不依赖于被控对象的具体数学模型,通过对系统内外扰动进行统一观测、补偿,以提高系统的抗扰能力,使系统具有很强的鲁棒性[7 -8 ] .文献[9 ]针对高速磁悬浮系统中负载扰动对三相PWM直流侧的输出电压造成影响,采用自抗扰对磁悬浮系统的负载扰动进行观测和抑制,以提高系统的鲁棒性.文献[10 ]基于自抗扰对扰动的监测和补偿,有效地解决了永磁同步电机在低速时容易受到扰动影响的问题,提高了系统的抗扰性. ...
Compensatory fuzzy neural network control with dynamic parameters estimation for linear voice coil actuator-science direct
1
2017
... 对于直驱H型平台平行轴的同步控制主要有串联式、并联式、交叉耦合式等控制结构[11 -12 ] .但串联式和并联式存在结构上的缺陷,在串联式系统中两台电机接收信号不同步,引起信号滞后性;并联式的缺陷是各轴电机独立控制,当一轴电机受到扰动时,难以保证同步性能.针对这种情况,KOREN[13 ] 提出交叉耦合控制,其思想是将双轴的跟踪误差进行耦合,将得到的混合误差分配给单轴位置补偿,以减小同步误差.交叉耦合不但保证了两台电机能同时接受信号,而且对两台电机建立联系.文献[14 -15 ]将交叉耦合控制应用到双直线电机的同步控制中,有效地提高了系统同步精度.但交叉耦合系数是常值,而扰动又是时刻变化的,这无疑弱化了系统的同步性能.文献[16 ]根据交叉耦合的思想,对多电机同步控制设计自适应神经网络同步补偿器,通过补偿器分别对各台电机的位置量进行补偿,有效地提高了系统的同步性能.虽然神经网络具有强大的学习能力,但是缺乏对模糊信息的处理能力,对现有的经验知识不能很好地利用. ...
H型精密运动平台交叉耦合模糊PID同步控制
1
2018
... 对于直驱H型平台平行轴的同步控制主要有串联式、并联式、交叉耦合式等控制结构[11 -12 ] .但串联式和并联式存在结构上的缺陷,在串联式系统中两台电机接收信号不同步,引起信号滞后性;并联式的缺陷是各轴电机独立控制,当一轴电机受到扰动时,难以保证同步性能.针对这种情况,KOREN[13 ] 提出交叉耦合控制,其思想是将双轴的跟踪误差进行耦合,将得到的混合误差分配给单轴位置补偿,以减小同步误差.交叉耦合不但保证了两台电机能同时接受信号,而且对两台电机建立联系.文献[14 -15 ]将交叉耦合控制应用到双直线电机的同步控制中,有效地提高了系统同步精度.但交叉耦合系数是常值,而扰动又是时刻变化的,这无疑弱化了系统的同步性能.文献[16 ]根据交叉耦合的思想,对多电机同步控制设计自适应神经网络同步补偿器,通过补偿器分别对各台电机的位置量进行补偿,有效地提高了系统的同步性能.虽然神经网络具有强大的学习能力,但是缺乏对模糊信息的处理能力,对现有的经验知识不能很好地利用. ...
Cross-coupled fuzzy PID synchronous control for H-type precision motion platform
1
2018
... 对于直驱H型平台平行轴的同步控制主要有串联式、并联式、交叉耦合式等控制结构[11 -12 ] .但串联式和并联式存在结构上的缺陷,在串联式系统中两台电机接收信号不同步,引起信号滞后性;并联式的缺陷是各轴电机独立控制,当一轴电机受到扰动时,难以保证同步性能.针对这种情况,KOREN[13 ] 提出交叉耦合控制,其思想是将双轴的跟踪误差进行耦合,将得到的混合误差分配给单轴位置补偿,以减小同步误差.交叉耦合不但保证了两台电机能同时接受信号,而且对两台电机建立联系.文献[14 -15 ]将交叉耦合控制应用到双直线电机的同步控制中,有效地提高了系统同步精度.但交叉耦合系数是常值,而扰动又是时刻变化的,这无疑弱化了系统的同步性能.文献[16 ]根据交叉耦合的思想,对多电机同步控制设计自适应神经网络同步补偿器,通过补偿器分别对各台电机的位置量进行补偿,有效地提高了系统的同步性能.虽然神经网络具有强大的学习能力,但是缺乏对模糊信息的处理能力,对现有的经验知识不能很好地利用. ...
Cross-coupled biaxial computer control for manufacturing systems
1
1980
... 对于直驱H型平台平行轴的同步控制主要有串联式、并联式、交叉耦合式等控制结构[11 -12 ] .但串联式和并联式存在结构上的缺陷,在串联式系统中两台电机接收信号不同步,引起信号滞后性;并联式的缺陷是各轴电机独立控制,当一轴电机受到扰动时,难以保证同步性能.针对这种情况,KOREN[13 ] 提出交叉耦合控制,其思想是将双轴的跟踪误差进行耦合,将得到的混合误差分配给单轴位置补偿,以减小同步误差.交叉耦合不但保证了两台电机能同时接受信号,而且对两台电机建立联系.文献[14 -15 ]将交叉耦合控制应用到双直线电机的同步控制中,有效地提高了系统同步精度.但交叉耦合系数是常值,而扰动又是时刻变化的,这无疑弱化了系统的同步性能.文献[16 ]根据交叉耦合的思想,对多电机同步控制设计自适应神经网络同步补偿器,通过补偿器分别对各台电机的位置量进行补偿,有效地提高了系统的同步性能.虽然神经网络具有强大的学习能力,但是缺乏对模糊信息的处理能力,对现有的经验知识不能很好地利用. ...
双直线电机伺服系统Elman神经网络互补滑模交叉耦合同步控制
1
2018
... 对于直驱H型平台平行轴的同步控制主要有串联式、并联式、交叉耦合式等控制结构[11 -12 ] .但串联式和并联式存在结构上的缺陷,在串联式系统中两台电机接收信号不同步,引起信号滞后性;并联式的缺陷是各轴电机独立控制,当一轴电机受到扰动时,难以保证同步性能.针对这种情况,KOREN[13 ] 提出交叉耦合控制,其思想是将双轴的跟踪误差进行耦合,将得到的混合误差分配给单轴位置补偿,以减小同步误差.交叉耦合不但保证了两台电机能同时接受信号,而且对两台电机建立联系.文献[14 -15 ]将交叉耦合控制应用到双直线电机的同步控制中,有效地提高了系统同步精度.但交叉耦合系数是常值,而扰动又是时刻变化的,这无疑弱化了系统的同步性能.文献[16 ]根据交叉耦合的思想,对多电机同步控制设计自适应神经网络同步补偿器,通过补偿器分别对各台电机的位置量进行补偿,有效地提高了系统的同步性能.虽然神经网络具有强大的学习能力,但是缺乏对模糊信息的处理能力,对现有的经验知识不能很好地利用. ...
Synchronization control of Elman neural network complementary sliding mode and cross-coupled control for dual linear motors servo system
1
2018
... 对于直驱H型平台平行轴的同步控制主要有串联式、并联式、交叉耦合式等控制结构[11 -12 ] .但串联式和并联式存在结构上的缺陷,在串联式系统中两台电机接收信号不同步,引起信号滞后性;并联式的缺陷是各轴电机独立控制,当一轴电机受到扰动时,难以保证同步性能.针对这种情况,KOREN[13 ] 提出交叉耦合控制,其思想是将双轴的跟踪误差进行耦合,将得到的混合误差分配给单轴位置补偿,以减小同步误差.交叉耦合不但保证了两台电机能同时接受信号,而且对两台电机建立联系.文献[14 -15 ]将交叉耦合控制应用到双直线电机的同步控制中,有效地提高了系统同步精度.但交叉耦合系数是常值,而扰动又是时刻变化的,这无疑弱化了系统的同步性能.文献[16 ]根据交叉耦合的思想,对多电机同步控制设计自适应神经网络同步补偿器,通过补偿器分别对各台电机的位置量进行补偿,有效地提高了系统的同步性能.虽然神经网络具有强大的学习能力,但是缺乏对模糊信息的处理能力,对现有的经验知识不能很好地利用. ...
直接驱动H型平台鲁棒最优同步控制仿真研究
1
2022
... 对于直驱H型平台平行轴的同步控制主要有串联式、并联式、交叉耦合式等控制结构[11 -12 ] .但串联式和并联式存在结构上的缺陷,在串联式系统中两台电机接收信号不同步,引起信号滞后性;并联式的缺陷是各轴电机独立控制,当一轴电机受到扰动时,难以保证同步性能.针对这种情况,KOREN[13 ] 提出交叉耦合控制,其思想是将双轴的跟踪误差进行耦合,将得到的混合误差分配给单轴位置补偿,以减小同步误差.交叉耦合不但保证了两台电机能同时接受信号,而且对两台电机建立联系.文献[14 -15 ]将交叉耦合控制应用到双直线电机的同步控制中,有效地提高了系统同步精度.但交叉耦合系数是常值,而扰动又是时刻变化的,这无疑弱化了系统的同步性能.文献[16 ]根据交叉耦合的思想,对多电机同步控制设计自适应神经网络同步补偿器,通过补偿器分别对各台电机的位置量进行补偿,有效地提高了系统的同步性能.虽然神经网络具有强大的学习能力,但是缺乏对模糊信息的处理能力,对现有的经验知识不能很好地利用. ...
Simulation of robust optimal synchronization control for direct drive H-type motion platform
1
2022
... 对于直驱H型平台平行轴的同步控制主要有串联式、并联式、交叉耦合式等控制结构[11 -12 ] .但串联式和并联式存在结构上的缺陷,在串联式系统中两台电机接收信号不同步,引起信号滞后性;并联式的缺陷是各轴电机独立控制,当一轴电机受到扰动时,难以保证同步性能.针对这种情况,KOREN[13 ] 提出交叉耦合控制,其思想是将双轴的跟踪误差进行耦合,将得到的混合误差分配给单轴位置补偿,以减小同步误差.交叉耦合不但保证了两台电机能同时接受信号,而且对两台电机建立联系.文献[14 -15 ]将交叉耦合控制应用到双直线电机的同步控制中,有效地提高了系统同步精度.但交叉耦合系数是常值,而扰动又是时刻变化的,这无疑弱化了系统的同步性能.文献[16 ]根据交叉耦合的思想,对多电机同步控制设计自适应神经网络同步补偿器,通过补偿器分别对各台电机的位置量进行补偿,有效地提高了系统的同步性能.虽然神经网络具有强大的学习能力,但是缺乏对模糊信息的处理能力,对现有的经验知识不能很好地利用. ...
1
2019
... 对于直驱H型平台平行轴的同步控制主要有串联式、并联式、交叉耦合式等控制结构[11 -12 ] .但串联式和并联式存在结构上的缺陷,在串联式系统中两台电机接收信号不同步,引起信号滞后性;并联式的缺陷是各轴电机独立控制,当一轴电机受到扰动时,难以保证同步性能.针对这种情况,KOREN[13 ] 提出交叉耦合控制,其思想是将双轴的跟踪误差进行耦合,将得到的混合误差分配给单轴位置补偿,以减小同步误差.交叉耦合不但保证了两台电机能同时接受信号,而且对两台电机建立联系.文献[14 -15 ]将交叉耦合控制应用到双直线电机的同步控制中,有效地提高了系统同步精度.但交叉耦合系数是常值,而扰动又是时刻变化的,这无疑弱化了系统的同步性能.文献[16 ]根据交叉耦合的思想,对多电机同步控制设计自适应神经网络同步补偿器,通过补偿器分别对各台电机的位置量进行补偿,有效地提高了系统的同步性能.虽然神经网络具有强大的学习能力,但是缺乏对模糊信息的处理能力,对现有的经验知识不能很好地利用. ...
1
2019
... 对于直驱H型平台平行轴的同步控制主要有串联式、并联式、交叉耦合式等控制结构[11 -12 ] .但串联式和并联式存在结构上的缺陷,在串联式系统中两台电机接收信号不同步,引起信号滞后性;并联式的缺陷是各轴电机独立控制,当一轴电机受到扰动时,难以保证同步性能.针对这种情况,KOREN[13 ] 提出交叉耦合控制,其思想是将双轴的跟踪误差进行耦合,将得到的混合误差分配给单轴位置补偿,以减小同步误差.交叉耦合不但保证了两台电机能同时接受信号,而且对两台电机建立联系.文献[14 -15 ]将交叉耦合控制应用到双直线电机的同步控制中,有效地提高了系统同步精度.但交叉耦合系数是常值,而扰动又是时刻变化的,这无疑弱化了系统的同步性能.文献[16 ]根据交叉耦合的思想,对多电机同步控制设计自适应神经网络同步补偿器,通过补偿器分别对各台电机的位置量进行补偿,有效地提高了系统的同步性能.虽然神经网络具有强大的学习能力,但是缺乏对模糊信息的处理能力,对现有的经验知识不能很好地利用. ...
High order fuzzy time series method based on pi-sigma neural network
1
2018
... 本文采用的是T-S模糊系统,所选的神经网络为pi-sigma神经网络.模糊型pi-sigma神经网络具有很强的自适应能力,对模糊模型也实现了自动更新,对模糊子集的隶属函数也进行不断修正[17 ⇓ -19 ] .图4 为该模糊型pi-sigma神经网络的结构图. ...
1
2008
... 本文采用的是T-S模糊系统,所选的神经网络为pi-sigma神经网络.模糊型pi-sigma神经网络具有很强的自适应能力,对模糊模型也实现了自动更新,对模糊子集的隶属函数也进行不断修正[17 ⇓ -19 ] .图4 为该模糊型pi-sigma神经网络的结构图. ...
1
2008
... 本文采用的是T-S模糊系统,所选的神经网络为pi-sigma神经网络.模糊型pi-sigma神经网络具有很强的自适应能力,对模糊模型也实现了自动更新,对模糊子集的隶属函数也进行不断修正[17 ⇓ -19 ] .图4 为该模糊型pi-sigma神经网络的结构图. ...
A self-adaption compensation control for hysteresis nonlinearity in piezo-actuated stages based on Pi-sigma fuzzy neural network
1
2018
... 本文采用的是T-S模糊系统,所选的神经网络为pi-sigma神经网络.模糊型pi-sigma神经网络具有很强的自适应能力,对模糊模型也实现了自动更新,对模糊子集的隶属函数也进行不断修正[17 ⇓ -19 ] .图4 为该模糊型pi-sigma神经网络的结构图. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}