1 引言
如今,随着环境问题的日益突出,以光伏、风电等新能源为主导的新型电力系统逐渐出现在大众视野[1 ] 。为发挥分布式发电的潜力,实现其灵活且稳定的接入,保障对负荷的可靠供电,微电网技术作为一种优秀的解决方案被提出。微电网技术代表了未来新型电力系统的发展趋势,是未来智能配用电系统的重要组成部分,对推进节能减排和实现能源可持续发展具有重要意义[2 ] 。
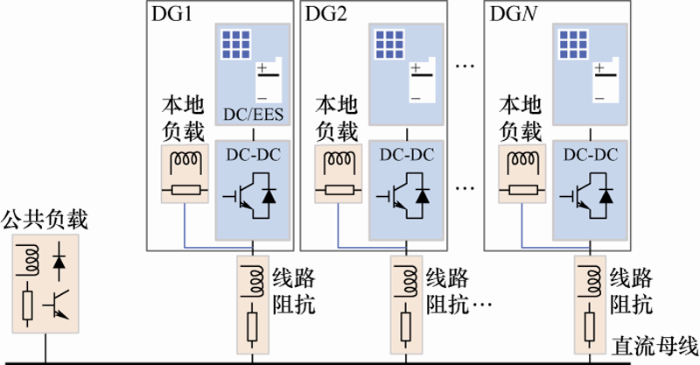
微电网按运行方式可以分为直流微电网、交流微电网和交直流混联微电网[3 ] 。然而微电网内光伏、电池储能单元以及常用负荷等产生或使用的电能大部分为直流电,直接使用直流微电网将会大大减少电力电子的能量变换环节从而提高系统的效率。同时直流微电网中不存在频率和无功功率的概念,降低了微电网系统的控制复杂度。因此,直流微电网逐渐获得广泛的关注。常见的孤岛微电网典型结构如图1 所示。
图1
直流微电网中分布式能源特性复杂且拥有不同的时间尺度,因此基于对传统电网分层控制的模拟,直流微电网的分层控制体系也应运而生。微电网的分层控制体系分为初级、次级以及三级控制层[4 ] 。初级控制层为设备级的控制层,为了保证即插即用的效果,常采用下垂控制来实现各分布式电源的功率分配。然而下垂控制的功率分配精度会受线路寄生阻抗的影响且电压的调节不是有差的,因此次级控制层的主要目的是实现各分布式电源精准的功率分配和无差的电压调节,提高微电网的电能质量。三级控制层的功能是控制微电网的功率流动方向,保证微电网运行的稳定与经济。
在次级与三级控制层中按控制结构可分为集中式、分散式和分布式控制。集中式控制结构可实现全局最优决策,但其具有通信链路复杂、可靠性差的缺点;分散式控制结构无需依赖复杂的通信,但也面对着通过本地信息无法做出全局最优决策的问题。然而分布式控制结构仅根据邻居节点间通信的方式实现对全局的可观与优化,兼具集中和分散的优点,因此分布式控制架构被认为是微电网控制的关键技术。近年来,学术界在分布式控制架构上取得了丰富的成果。文献[5 ]在控制器中加入了平均电压和电流调节器,实现了功率共享与电压恢复,这种方法仍需要从其余结点获得平均电压与电流;文献[6 ]提出了采用动态一致性算法的稀疏通信网络,分别采用电压和电流调节器来实现无差电压调节以及功率合理分配,这种方法虽然只需要邻居结点的信息,但是其实现过程较为复杂;文献[7 ]针对交直流混合微电网群采用离散一致性理论进行协调控制,并分析通信延时对一致性算法收敛性的影响。
直流微电网分布式协同控制策略需要不断地从邻居节点获取信息,因此其对通信设备带宽要求较高,如何减小通信量以降低设备负担将是该控制策略下的一个问题。现存的方法均为采用两个电压电流控制器分别实现电压无差调节与功率精准分配,然而采用这种方法需要繁琐复杂的参数配置,同时会带来高通信数据量的问题。
本文旨在研究基于一致性算法的直流微电网改进协同控制策略,主要工作内容如下。首先阐述了直流微电网的发展现状以及现存的亟待解决的问题;其次介绍直流微电网下垂控制原理,并对其存在的局限性进行分析;然后提出基于动态一致性算法的微电网协同控制策略,并引入统一的分布式控制器;最后通过仿真结果对所提方案的性能进行评价,并进行对研究内容的总结。
2 直流微电网下垂控制策略
2.1 下垂控制的原理
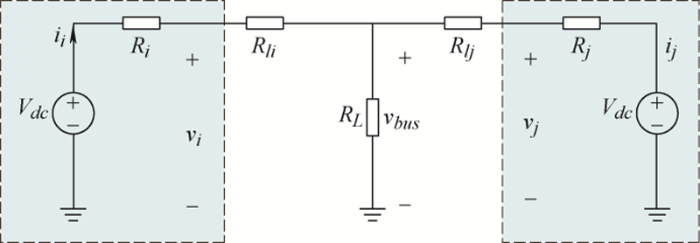
在直流微电网中,分布式电源通过DC-DC变换器与直流母线相连。下垂控制来源于对传统同步发电机的下垂外特性的模拟,其主要通过改变电力电子变换器的输出特性来实现功率的合理分配,直流微电网的等效模型如图2 所示。
图2
(1) ${{v}_{i}}=v_{dc}^{*}-{{i}_{i}}{{R}_{i}}$
(2) ${{v}_{bus}}=v_{dc}^{*}-({{R}_{i}}+{{R}_{li}}){{i}_{i}}$
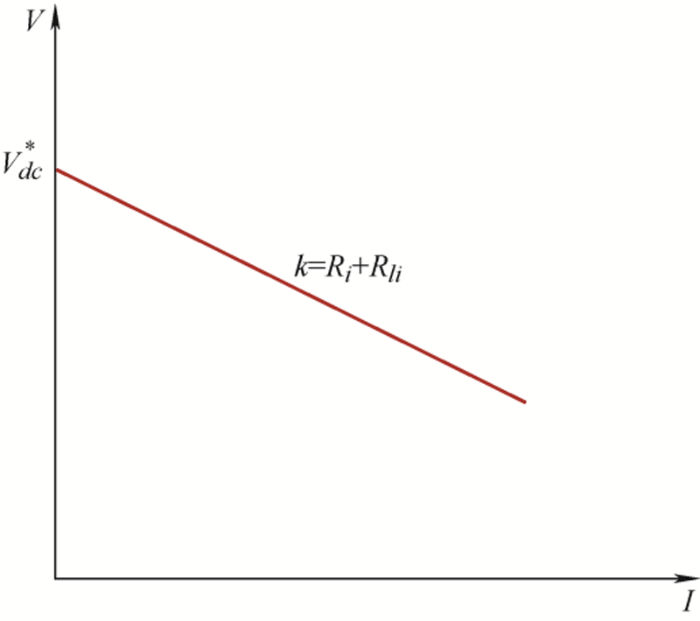
由式(2)可知,下垂控制的$I-V$ 图3 ),下垂曲线方程为线性方程,其斜率${{R}_{i}}+{{R}_{li}}$ $v_{dc}^{*}$
图3
(3) ${{i}_{i}}=\frac{v_{dc}^{*}-{{v}_{bus}}}{{{R}_{i}}+{{R}_{li}}}$
(4) $\frac{{{i}_{i}}}{{{i}_{j}}}=\frac{{{R}_{j}}+{{R}_{lj}}}{{{R}_{i}}+{{R}_{li}}}$
2.2 下垂控制的局限性
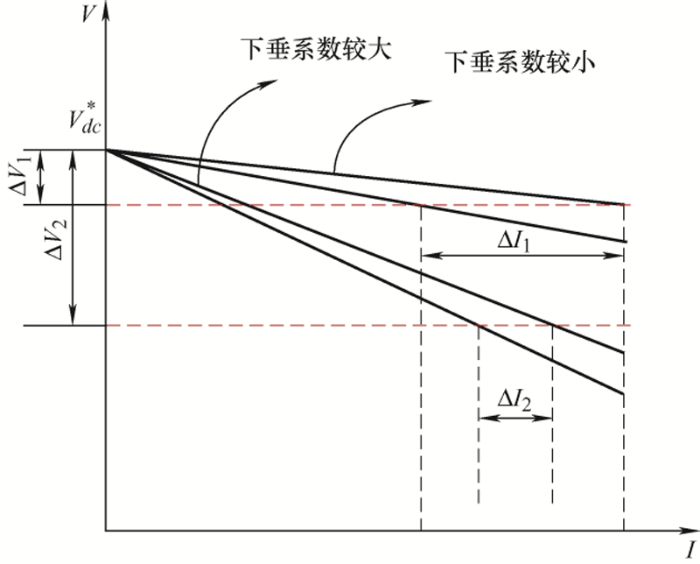
由式(4)可知,各个变换器负载电流的分配依赖于输出阻抗和线路寄生阻抗,但若各个线路寄生阻抗相差较大时,会大大影响电流分配的精度[8 ] 。图4 选取了两组曲线,一组曲线下垂系数较小,另一组曲线下垂系数较大,选择较小的下垂系数可以得到较小的电压偏差,但分流精度较差;选择较大的下垂系数可以提高分流精度,但电压偏差较大,因此下垂控制系数的选择在电压调节和分流精度上需要进行取舍,通常无法达到电压无差调节和功率精准分配。因此需要引入次级控制对其进行改善。
图4
3 直流微电网协同控制技术
3.1 研究现状
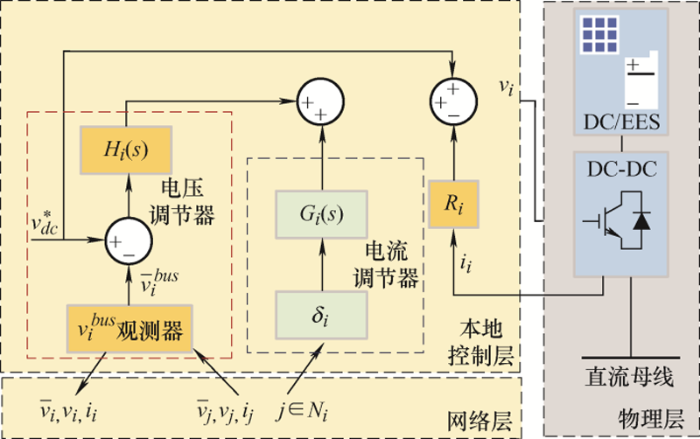
为了便于比较,本节简要介绍一种直流微电网中先进的控制方法。在文献[5 ]中,提出了一种仅与其直接相邻单元共享信息的协同控制策略。首先,引入电压观测器来估计全局平均电压。然后,电压设定点由电压调节器和电流调节器产生。具体而言,电压调节器产生电压校正项以恢复电压偏差。同时,电流调节器将每个变换器本地单元的电流与其相邻的变换器进行比较。因此,该电流调节器提供了第二个电压校正项以同步每个单元的电流,从而保证功率成比例分配,其控制框图如图5 所示。
图5
(5) $v_{i}^{*}=v_{dc}^{*}-{{R}_{i}}{{i}_{i}}+{{H}_{i}}(s)(v_{dc}^{*}-\overline{v}_{i}^{bus})+{{G}_{i}}(s){{\delta }_{i}}$
(6) $\overline{v}_{i}^{bus}(t)={{v}_{i}}(t)+\int_{0}^{t}{\sum\limits_{j\in {{N}_{i}}}{{{a}_{ij}}(\overline{v}_{j}^{bus}(\tau )-\overline{v}_{i}^{bus}(\tau ))}}d\tau $
(7) ${{\delta }_{i}}=\sum\limits_{j\in {{N}_{i}}}{c{{a}_{ij}}(i_{j}^{pu}-i_{i}^{pu})}$
式中,${{H}_{i}}(s)$ ${{G}_{i}}(s)$ ${{a}_{ij}}$ $c$ ${{N}_{i}}$ i 的所有相邻单元的集合;$v_{dc}^{*}$ ${{v}_{i}}$ i 的输出电压;$\overline{v}_{i}^{bus}$ $\overline{v}_{j}^{bus}$ i 、j 对应的母线电压观测值;${{i}_{i}}$ ${{i}_{j}}$ i 、j 对应的输出电流。
这种分布式控制方式通过稀疏的通信网络进行信息交换,具有即插即用的能力,然而需要单独设计电压调节和功率分配的PI环节,显然提高了系统设计的复杂度,此外,每个节点都需要与相邻节点交换电压和电流信息,带来了高通信消耗的问题。
3.2 图论基础
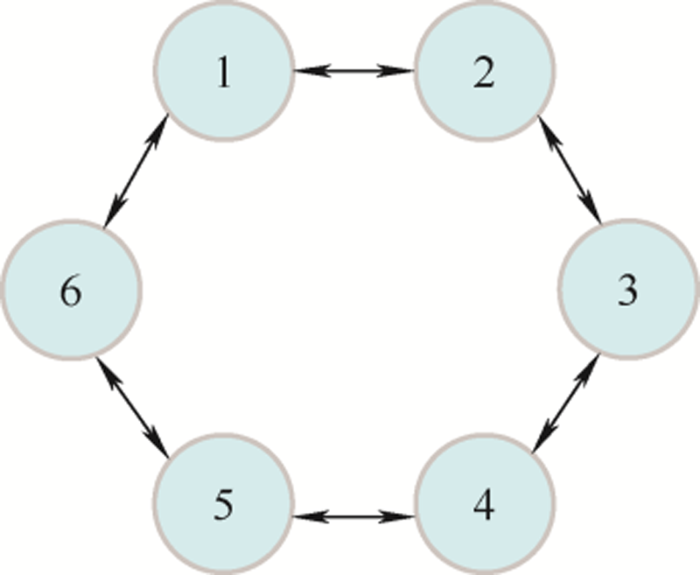
为了建立各个分布式节点之间的通信关系,需要引入图论的知识[9 ] 。首先介绍图的概念,图是由各个节点组成的一个集合,如图6 所示是由6个节点构成的图,顶点的集合可以表示为$V=\{1,2,3,4,5,6\}$ $E=(12,23,34,45,56,61)$ $G=(V,E)$
图6
在图论当中,度是一个很重要的概念,度指的是每个顶点连接到它的边的个数,例如图中节点3的度是2,因此可以定义度矩阵D
(8) $D=\left( \begin{matrix} 2 & 0 & 0 & 0 & 0 & 0 \\ 0 & 2 & 0 & 0 & 0 & 0 \\ 0 & 0 & 2 & 0 & 0 & 0 \\ 0 & 0 & 0 & 2 & 0 & 0 \\ 0 & 0 & 0 & 0 & 2 & 0 \\ 0 & 0 & 0 & 0 & 0 & 2 \\\end{matrix} \right)$
在图的矩阵中,邻接矩阵也是一个非常重要的概念,邻接矩阵中的元素取决于相邻的顶点间是否有连接,如果有元素为1,若没有元素为0。可以得出邻接矩阵${{A}_{G}}$
(9) ${{A}_{G}}=\left( \begin{matrix} 0 & 1 & 0 & 0 & 0 & 1 \\ 1 & 0 & 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 & 0 & 1 \\ 1 & 0 & 0 & 0 & 1 & 0 \\\end{matrix} \right)$
(10) $L=D-{{A}_{G}}$
3.3 动态一致性算法
假设有N 个节点,其中每个节点都与邻居节点进行通信交流,同时可以使用本地测量值和获得的共享信息进行本地状态的更新。设变量${{r}_{i}}(t)$ i 个节点在t 时刻的输入参考信号,因此所有节点参考输入的平均值为
(11) $\overline{r}(t)=\frac{1}{N}\sum\limits_{i=1}^{N}{{{r}_{i}}(t)}$
(12) ${{x}_{i}}(t)=-\sum\limits_{j\in {{N}_{i}}}{{{a}_{i}}_{j}}({{x}_{i}}(t)-{{x}_{j}}(t))+{{\dot{r}}_{i}}(t)\ \ \ \ \ i\in \left\{ 1,2,\cdots,N \right\}$
令$x={{[{{x}_{1}},{{x}_{2}},{{x}_{3}},\cdots,{{x}_{N}}]}^{T}}$ $r={{[{{r}_{1}},{{r}_{2}},{{r}_{3}},\cdots,{{r}_{N}}]}^{T}}$
(13) $\dot{x}(t)=-Lx(t)+\dot{r}(t)$
动态一致性算法是分布式的,每个节点只从其邻居节点获取信息,这个特性很好地满足了微电网稀疏通信网络的要求。在这里,令观察到的节点i 的全局平均母线电压$\overline{v}_{i}^{bus}(t)$ ${{v}_{i}}(t)$
实际上,最理想的情况是所有母线电压都被调节到额定值,然而这种情况下无法实现功率的合理分配,因此这里选择加权平均母线电压来实现全局电压调节。具体来说,在直流微电网中,设计合理的动态一致性算法确保全局平均母线电压$\overline{v}_{i}^{bus}$ $\frac{1}{N}\sum\limits_{i=1}^{N}{{{v}_{i}}(t)}$
4 统一的分布式协同控制策略
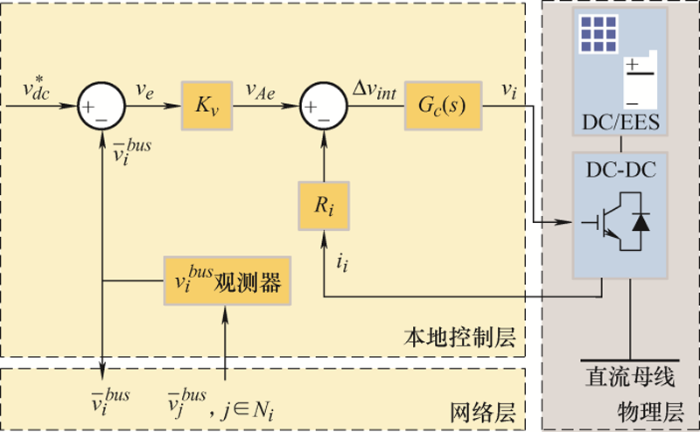
本节提出了一种统一的分布式协同控制方法,以同时实现电压调节和功率分配,该方法将两个目标统一至一个控制器当中。实现框图如图7 所示。
图7
所提方法包括两部分,一部分是电压观测器,另一个部分是电压调节器,前者在第3节中进行了详细介绍,本节重点介绍电压调节器。
正如图7 所示,误差${{v}_{e}}$ $v_{dc}^{*}$ $\overline{v}_{i}^{bus}$ ${{K}_{v}}$ ${{v}_{Ae}}$
(14) ${{v}_{Ae}}={{K}_{v}}(v_{dc}^{*}-\bar{v}_{i}^{bus})$
${{v}_{Ae}}$ ${{R}_{i}}$ $\Delta {{v}_{int}}$ ${{G}_{c}}(s)$ ${{G}_{c}}(s)$
(15) ${{G}_{c}}(s)=\frac{1}{s}$
(16) $\overset{\centerdot }{\mathop{v_{i}^{*}}}\,=({{v}_{Ae}}-{{R}_{i}}\cdot {{i}_{i}})\approx ({{v}_{Ae}}-{{R}_{i}}\cdot {{i}_{i}})$
在稳态情况下,$\Delta {{v}_{int}}$ $\Delta {{v}_{int}}\approx ({{v}_{Ae}}-{{i}_{i}}\cdot {{R}_{i}})=0$
(17) $i_{i}^{{}}=\frac{{{K}_{v}}(v_{dc}^{*}-\bar{v}_{i}^{bus})}{R_{i}^{{}}}$
此时,若近似认为各单元电压观测值相等,即$\overline{v}_{i}^{bus}=\overline{v}_{j}^{bus}$ ${{K}_{v}}$ a 是一个常数。
(18) $R_{i}^{o}\cdot i_{i}^{o}={{K}_{v}}(v_{dc}^{*}-\bar{v}_{i}^{bus})=a$
同时负载电流的分配与额定功率的分配成比例,设置虚拟电阻满足如下
(19) $\frac{R_{i}^{{}}}{R_{j}^{{}}}=\frac{{{S}_{j}}}{{{S}_{i}}}$
式中,Si 、Sj 为分布式电源的额定功率,则可以通过设置虚拟电阻成比例来实现各节点功率按比例分配。
除此之外,所提方法的另一个优势在于其较好的电压调节能力,对式(17)进行代数变换得
(20) $\bar{v}_{i}^{bus}=v_{dc}^{*}-\frac{R_{i}^{{}}\cdot i_{i}^{{}}}{{{K}_{v}}}$
因此,若设置${{K}_{v}}$
到目前为止,所提方法电压调节和功率分配的任务均在一个统一的控制器中完成,仅需要邻居节点的电压信息,而不用单独设计两个电压和电流调节器,因此大大简化了系统的设计,同时降低了通信带宽的负担。
5 结果验证
5.1 仿真参数
本文采用由4台分布式电源构成的孤岛直流微电网系统,各个分布式电源由DC-DC变换器连接至公共母线。采用PLECS软件对其进行仿真,其具体参数设定如表1 所示。
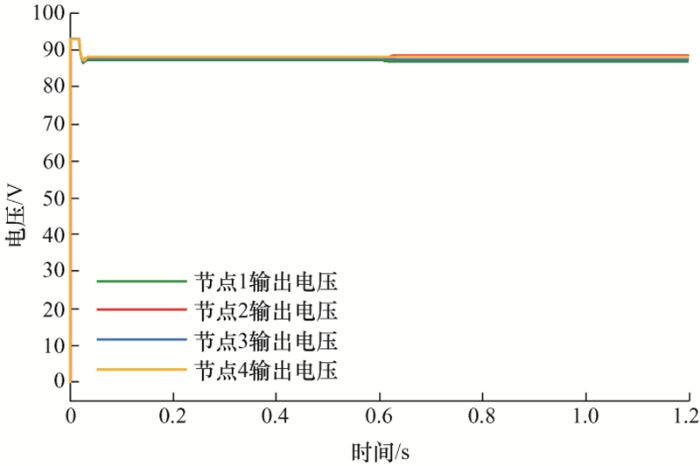
仿真采用的仿真时长为1.2 s,仿真步长为200 ms,一致性算法迭代周期为0.002 s,仿真模型采用4个分布式电源节点并联至直流母线上,其功率分配比为1∶1∶1∶1。
5.2 仿真结果分析
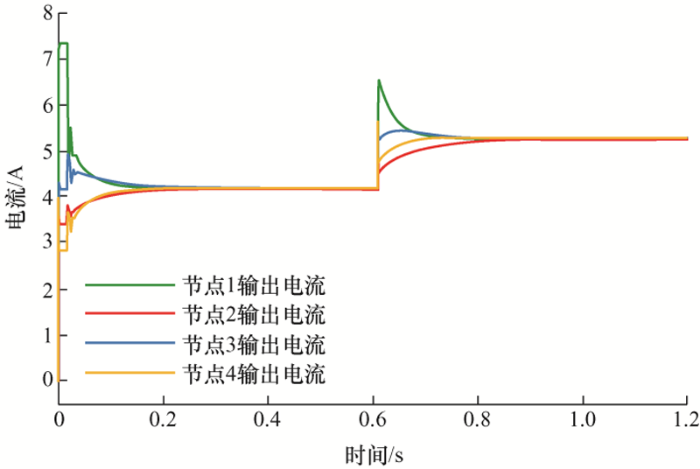
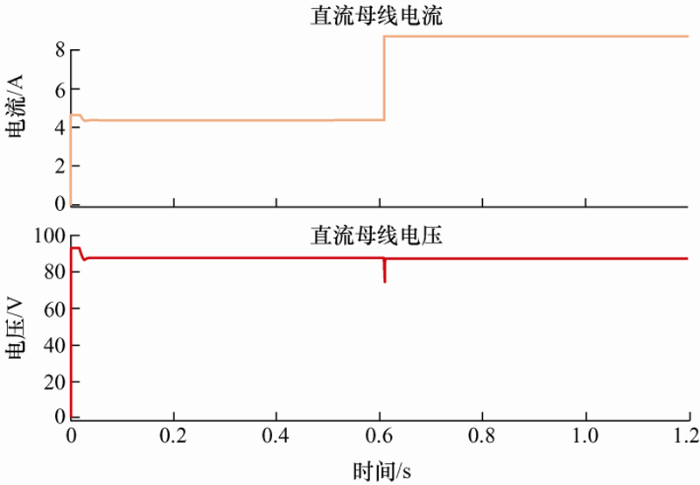
仿真模型在0.61 s时加入公共负载突变。图8 所示为各节点电压波形,图9 所示为各节点电流波形,可见在公共负载突变前,4个节点的电压和电流均可一致性收敛。当发生公共负载的突变后,4个节点可以仅在0.3 ms内便可继续保证电压和电流的一致性收敛,具有很快的暂态恢复速度。图10 为直流母线电压与电流波形,说明了所提方法可以实现良好的电压调节能力和精确的功率分配。
图8
图9
图10
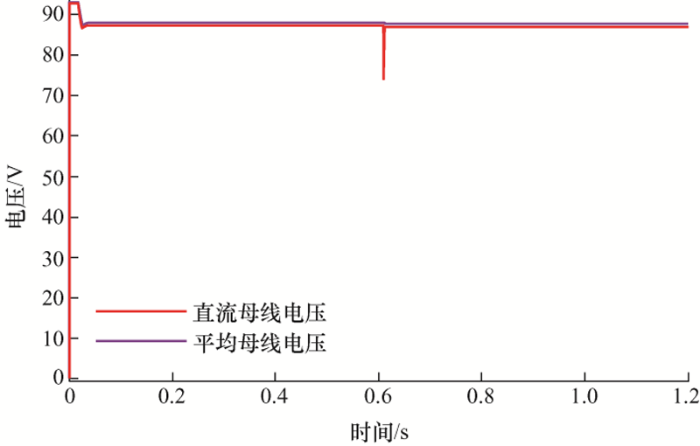
在第3.3节中介绍了本文采用的是加权平均母线电压来实现全局电压调节,因此图11 展示了直流母线电压与加权平均母线电压的波形,由图11 可知,无论在初始公共负载的情况下还是公共负载突变的情况下,直流母线电压均在一定的精度范围内对加权平均母线电压实现跟随。
图11
6 结论
本文提出了基于动态一致性算法的直流微电网高品质协同控制策略。该策略首先针对直流微电网传统下垂控制带来的问题,采用动态一致性算法,实现了较好的电压调节和精准的功率分配。之后针对传统的基于一致性算法的分布式协同控制需要消耗大量通信资源的问题,采用了统一分布式控制器,该方法将电压和电流控制目标集合到一起,仅需要与邻居节点交换电压信息便可以保证一致性。综上所述,所提方法可以在较低的通信带宽需求下,实现较好的电压调节和精准的功率分配,并且具有一定的抗干扰能力,拥有高品质的控制水平。
参考文献
View Option
[1]
朱珊珊 , 汪飞 , 郭慧 , 等 . 直流微电网下垂控制技术研究综述
[J]. 中国电机工程学报 , 2018 , 38 (1 ):72 -84 ,344.
[本文引用: 1]
ZHU Shanshan WANG Fei GUO Hui et al. Overview of droop control in DC microgrid
[J]. Proceedings of the CSEE , 2018 , 38 (1 ):72 -84 ,344.
[本文引用: 1]
[2]
李霞林 , 郭力 , 王成山 , 等 . 直流微电网关键技术研究综述
[J]. 中国电机工程学报 , 2016 , 36 (1 ):2 -17 .
[本文引用: 1]
LI Xialin GUO Li WANG Chengshan et al. Key technologies of DC microgrids:An overview
[J]. Proceedings of the CSEE , 2016 , 36 (1 ):2 -17 .
[本文引用: 1]
[3]
XIA Y WEI W YU M et al. Power management for a hybrid ac/dc microgrid with multiple subgrids
[J]. IEEE Trans. Power Electron. , 2018 , 33 (4 ):3520 -3533 .
DOI:10.1109/TPEL.2017.2705133
URL
[本文引用: 1]
[4]
OLIVARES E D MEHRIZI-SANI A ETEMADI H A et al. Trends in microgrid control
[J]. IEEE Transactions on Smart Grid , 2014 , 5 (4 ):1905 -1919 .
DOI:10.1109/TSG.2013.2295514
URL
[本文引用: 1]
[5]
LU X GUERRERO J M SUN K et al. An improved droop control method for dc microgrids based on low bandwidth communication with DC bus voltage restoration and enhanced current sharing accuracy
[J]. IEEE Trans. Power Electron. , 2014 , 29 (4 ):1800 -1812 .
DOI:10.1109/TPEL.2013.2266419
URL
[本文引用: 3]
[6]
NASIRIAN V MOAYEDI S DAVOUDI A et al. Distributed cooperative control of dc microgrids
[J]. IEEE Trans. Power Electron. , 2015 , 30 (4 ):2288 -2303 .
DOI:10.1109/TPEL.2014.2324579
URL
[本文引用: 1]
[7]
高扬 , 艾芊 , 王靖 . 多智能体系统的交直流混合微网群一致性协同控制
[J]. 高电压技术 , 2018 , 44 (7 ):2372 -2377 .
[本文引用: 1]
GAO Yang AI Qian WANG Jing Consensus cooperative control of AC/DC hybrid microgrids based on multi-agent system
[J]. High Voltage Engineering , 2018 , 44 (7 ):2372 -2377 .
[本文引用: 1]
[8]
黄桂根 . 直流微网自适应下垂均流技术研究 [D]. 杭州 : 浙江大学 , 2016 .
[本文引用: 1]
HUANG Guigen Research on adaptive droop current-sharing technique for DC micro-grid [D]. Hangzhou : Zhejiang University , 2016 .
[本文引用: 1]
[9]
周建宇 , 闫林芳 , 刘巨 , 等 . 基于一致性理论的直流微电网混合储能协同控制策略
[J]. 中国电机工程学报 , 2018 , 38 (23 ):6837 -6846 ,7118.
[本文引用: 1]
ZHOU Jianyu YAN Linfang LIU Ju et al. A cooperative control strategy for DC microgrid based on consensus algorithm
[J]. Proceedings of the CSEE , 2018 , 38 (23 ):6837 -6846 ,7118.
[本文引用: 1]
[10]
KIA S S SCOY B V CORTES J et al. Tutorial on dynamic average consensus:The problem,its applications,and the algorithms
[J]. IEEE Control Systems Magazine , 2019 , 39 (3 ):40 -72 .
[本文引用: 1]
直流微电网下垂控制技术研究综述
1
2018
... 如今,随着环境问题的日益突出,以光伏、风电等新能源为主导的新型电力系统逐渐出现在大众视野[1 ] .为发挥分布式发电的潜力,实现其灵活且稳定的接入,保障对负荷的可靠供电,微电网技术作为一种优秀的解决方案被提出.微电网技术代表了未来新型电力系统的发展趋势,是未来智能配用电系统的重要组成部分,对推进节能减排和实现能源可持续发展具有重要意义[2 ] . ...
Overview of droop control in DC microgrid
1
2018
... 如今,随着环境问题的日益突出,以光伏、风电等新能源为主导的新型电力系统逐渐出现在大众视野[1 ] .为发挥分布式发电的潜力,实现其灵活且稳定的接入,保障对负荷的可靠供电,微电网技术作为一种优秀的解决方案被提出.微电网技术代表了未来新型电力系统的发展趋势,是未来智能配用电系统的重要组成部分,对推进节能减排和实现能源可持续发展具有重要意义[2 ] . ...
直流微电网关键技术研究综述
1
2016
... 如今,随着环境问题的日益突出,以光伏、风电等新能源为主导的新型电力系统逐渐出现在大众视野[1 ] .为发挥分布式发电的潜力,实现其灵活且稳定的接入,保障对负荷的可靠供电,微电网技术作为一种优秀的解决方案被提出.微电网技术代表了未来新型电力系统的发展趋势,是未来智能配用电系统的重要组成部分,对推进节能减排和实现能源可持续发展具有重要意义[2 ] . ...
Key technologies of DC microgrids:An overview
1
2016
... 如今,随着环境问题的日益突出,以光伏、风电等新能源为主导的新型电力系统逐渐出现在大众视野[1 ] .为发挥分布式发电的潜力,实现其灵活且稳定的接入,保障对负荷的可靠供电,微电网技术作为一种优秀的解决方案被提出.微电网技术代表了未来新型电力系统的发展趋势,是未来智能配用电系统的重要组成部分,对推进节能减排和实现能源可持续发展具有重要意义[2 ] . ...
Power management for a hybrid ac/dc microgrid with multiple subgrids
1
2018
... 微电网按运行方式可以分为直流微电网、交流微电网和交直流混联微电网[3 ] .然而微电网内光伏、电池储能单元以及常用负荷等产生或使用的电能大部分为直流电,直接使用直流微电网将会大大减少电力电子的能量变换环节从而提高系统的效率.同时直流微电网中不存在频率和无功功率的概念,降低了微电网系统的控制复杂度.因此,直流微电网逐渐获得广泛的关注.常见的孤岛微电网典型结构如图1 所示. ...
Trends in microgrid control
1
2014
... 直流微电网中分布式能源特性复杂且拥有不同的时间尺度,因此基于对传统电网分层控制的模拟,直流微电网的分层控制体系也应运而生.微电网的分层控制体系分为初级、次级以及三级控制层[4 ] .初级控制层为设备级的控制层,为了保证即插即用的效果,常采用下垂控制来实现各分布式电源的功率分配.然而下垂控制的功率分配精度会受线路寄生阻抗的影响且电压的调节不是有差的,因此次级控制层的主要目的是实现各分布式电源精准的功率分配和无差的电压调节,提高微电网的电能质量.三级控制层的功能是控制微电网的功率流动方向,保证微电网运行的稳定与经济. ...
An improved droop control method for dc microgrids based on low bandwidth communication with DC bus voltage restoration and enhanced current sharing accuracy
3
2014
... 在次级与三级控制层中按控制结构可分为集中式、分散式和分布式控制.集中式控制结构可实现全局最优决策,但其具有通信链路复杂、可靠性差的缺点;分散式控制结构无需依赖复杂的通信,但也面对着通过本地信息无法做出全局最优决策的问题.然而分布式控制结构仅根据邻居节点间通信的方式实现对全局的可观与优化,兼具集中和分散的优点,因此分布式控制架构被认为是微电网控制的关键技术.近年来,学术界在分布式控制架构上取得了丰富的成果.文献[5 ]在控制器中加入了平均电压和电流调节器,实现了功率共享与电压恢复,这种方法仍需要从其余结点获得平均电压与电流;文献[6 ]提出了采用动态一致性算法的稀疏通信网络,分别采用电压和电流调节器来实现无差电压调节以及功率合理分配,这种方法虽然只需要邻居结点的信息,但是其实现过程较为复杂;文献[7 ]针对交直流混合微电网群采用离散一致性理论进行协调控制,并分析通信延时对一致性算法收敛性的影响. ...
... 为了便于比较,本节简要介绍一种直流微电网中先进的控制方法.在文献[5 ]中,提出了一种仅与其直接相邻单元共享信息的协同控制策略.首先,引入电压观测器来估计全局平均电压.然后,电压设定点由电压调节器和电流调节器产生.具体而言,电压调节器产生电压校正项以恢复电压偏差.同时,电流调节器将每个变换器本地单元的电流与其相邻的变换器进行比较.因此,该电流调节器提供了第二个电压校正项以同步每个单元的电流,从而保证功率成比例分配,其控制框图如图5 所示. ...
... 文献[
5 ]中的分布式协同控制策略框图
![]()
图5 中各变量表达式如式(5)~(7)所示 ...
Distributed cooperative control of dc microgrids
1
2015
... 在次级与三级控制层中按控制结构可分为集中式、分散式和分布式控制.集中式控制结构可实现全局最优决策,但其具有通信链路复杂、可靠性差的缺点;分散式控制结构无需依赖复杂的通信,但也面对着通过本地信息无法做出全局最优决策的问题.然而分布式控制结构仅根据邻居节点间通信的方式实现对全局的可观与优化,兼具集中和分散的优点,因此分布式控制架构被认为是微电网控制的关键技术.近年来,学术界在分布式控制架构上取得了丰富的成果.文献[5 ]在控制器中加入了平均电压和电流调节器,实现了功率共享与电压恢复,这种方法仍需要从其余结点获得平均电压与电流;文献[6 ]提出了采用动态一致性算法的稀疏通信网络,分别采用电压和电流调节器来实现无差电压调节以及功率合理分配,这种方法虽然只需要邻居结点的信息,但是其实现过程较为复杂;文献[7 ]针对交直流混合微电网群采用离散一致性理论进行协调控制,并分析通信延时对一致性算法收敛性的影响. ...
多智能体系统的交直流混合微网群一致性协同控制
1
2018
... 在次级与三级控制层中按控制结构可分为集中式、分散式和分布式控制.集中式控制结构可实现全局最优决策,但其具有通信链路复杂、可靠性差的缺点;分散式控制结构无需依赖复杂的通信,但也面对着通过本地信息无法做出全局最优决策的问题.然而分布式控制结构仅根据邻居节点间通信的方式实现对全局的可观与优化,兼具集中和分散的优点,因此分布式控制架构被认为是微电网控制的关键技术.近年来,学术界在分布式控制架构上取得了丰富的成果.文献[5 ]在控制器中加入了平均电压和电流调节器,实现了功率共享与电压恢复,这种方法仍需要从其余结点获得平均电压与电流;文献[6 ]提出了采用动态一致性算法的稀疏通信网络,分别采用电压和电流调节器来实现无差电压调节以及功率合理分配,这种方法虽然只需要邻居结点的信息,但是其实现过程较为复杂;文献[7 ]针对交直流混合微电网群采用离散一致性理论进行协调控制,并分析通信延时对一致性算法收敛性的影响. ...
Consensus cooperative control of AC/DC hybrid microgrids based on multi-agent system
1
2018
... 在次级与三级控制层中按控制结构可分为集中式、分散式和分布式控制.集中式控制结构可实现全局最优决策,但其具有通信链路复杂、可靠性差的缺点;分散式控制结构无需依赖复杂的通信,但也面对着通过本地信息无法做出全局最优决策的问题.然而分布式控制结构仅根据邻居节点间通信的方式实现对全局的可观与优化,兼具集中和分散的优点,因此分布式控制架构被认为是微电网控制的关键技术.近年来,学术界在分布式控制架构上取得了丰富的成果.文献[5 ]在控制器中加入了平均电压和电流调节器,实现了功率共享与电压恢复,这种方法仍需要从其余结点获得平均电压与电流;文献[6 ]提出了采用动态一致性算法的稀疏通信网络,分别采用电压和电流调节器来实现无差电压调节以及功率合理分配,这种方法虽然只需要邻居结点的信息,但是其实现过程较为复杂;文献[7 ]针对交直流混合微电网群采用离散一致性理论进行协调控制,并分析通信延时对一致性算法收敛性的影响. ...
1
2016
... 由式(4)可知,各个变换器负载电流的分配依赖于输出阻抗和线路寄生阻抗,但若各个线路寄生阻抗相差较大时,会大大影响电流分配的精度[8 ] .图4 选取了两组曲线,一组曲线下垂系数较小,另一组曲线下垂系数较大,选择较小的下垂系数可以得到较小的电压偏差,但分流精度较差;选择较大的下垂系数可以提高分流精度,但电压偏差较大,因此下垂控制系数的选择在电压调节和分流精度上需要进行取舍,通常无法达到电压无差调节和功率精准分配.因此需要引入次级控制对其进行改善. ...
1
2016
... 由式(4)可知,各个变换器负载电流的分配依赖于输出阻抗和线路寄生阻抗,但若各个线路寄生阻抗相差较大时,会大大影响电流分配的精度[8 ] .图4 选取了两组曲线,一组曲线下垂系数较小,另一组曲线下垂系数较大,选择较小的下垂系数可以得到较小的电压偏差,但分流精度较差;选择较大的下垂系数可以提高分流精度,但电压偏差较大,因此下垂控制系数的选择在电压调节和分流精度上需要进行取舍,通常无法达到电压无差调节和功率精准分配.因此需要引入次级控制对其进行改善. ...
基于一致性理论的直流微电网混合储能协同控制策略
1
2018
... 为了建立各个分布式节点之间的通信关系,需要引入图论的知识[9 ] .首先介绍图的概念,图是由各个节点组成的一个集合,如图6 所示是由6个节点构成的图,顶点的集合可以表示为$V=\{1,2,3,4,5,6\}$ $E=(12,23,34,45,56,61)$ $G=(V,E)$ . ...
A cooperative control strategy for DC microgrid based on consensus algorithm
1
2018
... 为了建立各个分布式节点之间的通信关系,需要引入图论的知识[9 ] .首先介绍图的概念,图是由各个节点组成的一个集合,如图6 所示是由6个节点构成的图,顶点的集合可以表示为$V=\{1,2,3,4,5,6\}$ $E=(12,23,34,45,56,61)$ $G=(V,E)$ . ...
Tutorial on dynamic average consensus:The problem,its applications,and the algorithms
1
2019



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}