1 引言
近年来,多相永磁同步电机(Permanent magnet synchronous machine,PMSM)受到了工业和学术界的广泛关注。相对于三相电机,多相电机具有低压大功率输出、高可靠性以及适于容错运行等特性,在航空航天、舰艇舰船、风力发电等领域得到了越来越多的认可[1 ,2 ,3 ] 。对于多相电机而言,故障容错运行是一个显著优势。当电机发生缺相故障时,不需要改动任何硬件电路,仅需选择适当的容错控制策略便可降额继续运行,此时避免了停机或系统重组[4 ,5 ,6 ] 。针对非正弦反电动势五相PMSM缺相容错运行,国内外学者对降阶解耦模型的磁场定向控制(Field-oriented control,FOC)进行了大量的研究。文献[7 ]通过构建降阶Clark变换矩阵,建立了五相PMSM故障后的解耦模型,其解耦模型将使同步坐标系下的转矩及电压方程与正常状态一致,但磁场中存在的三次谐波会导致转矩脉动。文献[8 ]为抑制故障后产生的转矩脉动,构建同步坐标系下的解耦模型,在速度环采用了滑模控制,但它会使得系统产生抖动,并且控制器的设计较复杂。为此,文献[9 ]采用三次谐波电流注入法来抑制转矩脉动,根据瞬时功率理论和电机反电动势信息,可计算得到故障后的平均转矩和脉动转矩分量,令转矩脉动分量为零,得到基波和三次谐波电流参考值,该方法计算过程复杂,无法在线生成参考电流信号。文献[10 ]给出了单相开路故障后三次谐波电流的注入和在线计算方法,有效地抑制三次谐波磁链引起的转矩脉动,但选用传统PI控制器,其对交流参考电流值的跟踪没有达到最佳效果。
上述提到的方法只得到了电流的最优参考信号,然而,其对参考信号并没有实现很好的跟踪。对于参考电流信号的跟踪,通常采用的是滞环控 制[11 ] 和PI控制器[12 ] ,滞环控制会带来开关频率不固定以及电流谐波较大的问题,而PI控制器可以完全消除直流信号的稳态误差,但对于交流电流信号却不能精确跟踪。比例谐振(Proportional resonance, PR)控制器[10 ] 可以有效地跟踪交流参考信号,但谐振控制器的带宽窄,只能对单一频率的信号进行补偿。
本文在五相PMSM 缺一相故障状态下,首先,通过基波空间和三次谐波空间的降阶变换矩阵,得到两个子空间同步坐标系下的转矩方程。然后,根据电机转矩方程,为了消除转矩脉动,分析了三次谐波电流注入率选取的方法,并根据最小铜耗及最大转矩原则对参考电流进行优化。针对传统PI控制器不能零稳态误差跟踪交流参考信号的问题,本文设计了QPR+PI控制器实现对交流参考电流进行精确跟踪。最后,由仿真和试验得到,故障后转矩脉动得到了有效抑制,设计的QPR+PI控制器也实现了对参考电流值的精确跟踪。
2 故障下基波空间控制模型
2.1 基波空间解耦模型
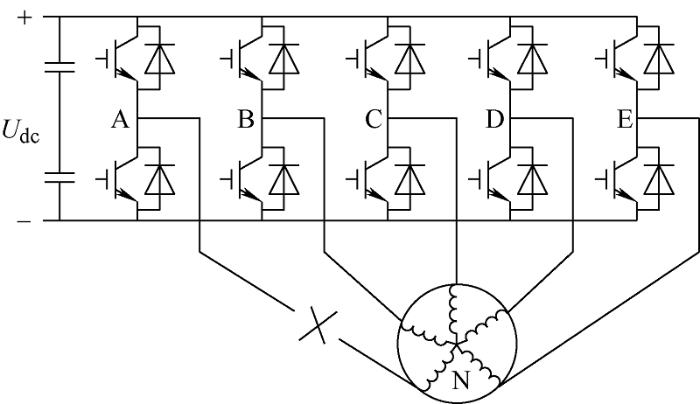
本文电机采用的是表贴式五相PMSM,为便于分析,假设电机A相发生缺相故障,五相PMSM缺A相故障后主电路结构图如图1 所示,其中,定子绕组为星形连接,N为电机中性点,U dc 为直流母线电压。
图1
在五相PMSM 缺A相故障前后,根据基波磁动势不变原则,重新构造的降阶Clark变换矩阵为
(1) ${{\rm T}_1}(\gamma ) = \frac{2}{5}\left[ {\begin{array}{*{20}{c}}{\cos \gamma + n}&{\cos 2\gamma + n}&{\cos 2\gamma + n}&{\cos \gamma + n}\\{\sin \gamma }&{\sin 2\gamma }&{ - \sin 2\gamma }&{ - \sin \gamma }\\{ - \sin 2\gamma }&{\sin \gamma }&{ - \sin \gamma }&{\sin 2\gamma }\\1&1&1&1\end{array}} \right]$
从静止坐标系[α 1 -β 1 -z 1 -o 1 ]到同步坐标系[d 1 -q 1 - z 1 -o 1 ]的Park变换矩阵为
(2) ${R_1}(\theta ) = \left[ {\begin{array}{*{20}{c}}{\cos \theta }&{\sin \theta }&0&0\\{ - \sin \theta }&{\cos \theta }&0&0\\0&0&1&0\\0&0&0&1\end{array}} \right]$
定子电流在[B -C -D -E ]、[α 1 -β 1 -z 1 -o 1 ]和[d 1 -q 1 -z 1 -o 1 ]各坐标系之间的变换关系为
(3) $\left\{ \begin{array}{l}{[{i_{{\rm{\alpha 1}}}}{\rm{ }}{i_{{\rm{\beta 1}}}}{\rm{ }}{i_{{\rm{z1}}}}{\rm{ }}{i_{{\rm{o1}}}}]^T} = {T_1}(\gamma ){[{i_{\rm{B}}}{\rm{ }}{i_{\rm{C}}}{\rm{ }}{i_{\rm{D}}}{\rm{ }}{i_{\rm{E}}}]^T}\\{[{i_{{\rm{d1}}}}{\rm{ }}{i_{{\rm{q1}}}}{\rm{ }}{i_{{\rm{z1}}}}{\rm{ }}{i_{{\rm{o1}}}}]^T} = {R_1}(\theta ){[{i_{{\rm{\alpha }}1}}{\rm{ }}{i_{{\rm{\beta 1}}}}{\rm{ }}{i_{{\rm{z1}}}}{\rm{ }}{i_{{\rm{o}}1}}]^T}\end{array} \right.$
由电机学原理得到,电磁转矩等于磁共能对机械角位移的偏导数
(4) $\begin{array}{c}{T_{{\rm{e1}}}} = \frac{{\partial {W_{{\rm{co}}}}}}{{\partial {\theta _{\rm{m}}}}} = {n_{\rm{p}}}(\frac{1}{2}{I_{\rm{s}}}^T\frac{{\partial {L_{\rm{s}}}}}{{\partial \theta }}{I_{\rm{s}}} + {I_{\rm{s}}}^T\frac{{\partial {\psi _{\rm{f}}}}}{{\partial \theta }}) = \\\frac{5}{2}{n_{\rm{p}}}({\psi _{{\rm{f}}1}}{i_{{\rm{q1}}}} + ({L_{{\rm{d1}}}} - {L_{{\rm{q1}}}}){i_{{\rm{q1}}}}{i_{{\rm{d}}1}})\end{array}$
式中,W co 为磁共能;θ m 为转子机械角度;n p 为电机极对数;ψ f 为永磁体磁链;ψ f1 为永磁磁链的基波幅值;I s 为相电流矢量;L s 为相电感矩阵;i d1 、i q1 分别为d 1 、q 1 轴的电流分量;L d1 、L q1 分别为d 1 、q 1 轴的电感分量,对于表贴式PMSM,L d1 =L q1 。
2.2 三次谐波磁势的影响
在五相PMSM磁动势中,正弦波只是一种理想状态,实际中,一方面,由于永磁体的加工及安装误差等会造成磁动势中存在一定的三次谐波成分;另一方面,为增加电机功率密度和输出转矩,也需要有意识地注入三次谐波磁势。当电机发生缺一相故障时,三次谐波磁势会与基波电流作用产生转矩脉动。
(5) ${\psi _{\rm{f}}} = {\psi _{{\rm{f}}1}}\left[ \begin{array}{l}\cos (\theta - \gamma )\\\cos (\theta - 2\gamma )\\\cos (\theta - 3\gamma )\\\cos (\theta - 4\gamma )\end{array} \right] + {\psi _{{\rm{f}}3}}\left[ \begin{array}{l}\cos 3(\theta - \gamma )\\\cos 3(\theta - 2\gamma )\\\cos 3(\theta - 3\gamma )\\\cos 3(\theta - 4\gamma )\end{array} \right]$
式中,${\psi _{{\rm{f}}3}}$为永磁磁链的三次谐波幅值。
由电机磁共能方法得到考虑三次谐波磁势的基波空间电磁转矩为
(6) $\begin{array}{l}{T_{{\rm{e1}}}} = \frac{5}{2}{n_{\rm{p}}}{\psi _{{\rm{f}}1}}{i_{{\rm{q}}1}} + \frac{{15}}{2}{n_{\rm{p}}}{\psi _{{\rm{f}}3}}{i_{{\rm{z}}1}}\cos 3\theta + \frac{{15}}{2}{n_{\rm{p}}}{\psi _{{\rm{f}}3}} \times \\\left( {\frac{{{i_{{\rm{d}}1}}(\sin 2\theta + \sin 4\theta )}}{2} + \frac{{{i_{{\rm{q}}1}}( - \cos 2\theta + \cos 4\theta )}}{2}} \right)\end{array}$
由式(6)可知,当电机缺一相故障后,三次谐波分量主要会引起二次和四次转矩脉动,因此,可通过三次谐波电流注入的方法来消除转矩 脉动。
3 故障下三次谐波空间控制模型
3.1 三次谐波空间解耦模型
在三次谐波空间中,按照基波降阶变换矩阵T 1 (γ )的求取方式,得出三次谐波空间下的降阶Clark变换矩阵为
(7) ${T_3}(\gamma ) = \frac{2}{5}\left[ {\begin{array}{*{20}{c}}{\sin \gamma }&{\sin 2\gamma }&{ - \sin 2\gamma }&{ - \sin \gamma }\\{\cos 2\gamma + n}&{\cos \gamma + n}&{\cos \gamma + n}&{\cos 2\gamma + n}\\{ - \sin 2\gamma }&{\sin \gamma }&{ - \sin \gamma }&{\sin 2\gamma }\\1&1&1&1\end{array}} \right]$
从静止坐标系[z 3 -α 3 -β 3 -o 3 ]到同步坐标系[z 3 -d 3 -q 3 -o 3 ]的Park变换矩阵为
(8) ${R_3}(\theta ) = \left[ \begin{array}{l} \begin{array}{*{20}{c}} {\rm{1}}&{{\rm{ 0}}}&{\begin{array}{*{20}{c}} {{\rm{ }}0}&{{\rm{ }}0} \end{array}} \end{array}\\ \begin{array}{*{20}{c}} 0&{{\rm{ }}\cos 3\theta }&{{\rm{ }}\sin 3\theta }&{{\rm{ }}0} \end{array}\\ \begin{array}{*{20}{c}} 0&{ - \sin 3\theta }&{\cos 3\theta {\rm{ }}}&0 \end{array}\\ \begin{array}{*{20}{c}} 0&{{\rm{ }}0}&{{\rm{ }}0}&{{\rm{ }}1} \end{array} \end{array} \right]$
三次谐波电流在[B -C -D -E ]、[z 3 -α 3 -β 3 -o 3 ]和[z 3 -d 3 -q 3 -o 3 ]各坐标系之间的变换关系为
(9) $\left\{ \begin{array}{l}{[{i_{{\rm{z}}3}}{\rm{ }}{i_{{\rm{\alpha }}3}}{\rm{ }}{i_{{\rm{\beta }}3}}{\rm{ }}{i_{{\rm{o}}3}}]^T} = {T_3}(\gamma ){[{i_{\rm{B}}}{\rm{ }}{i_{\rm{C}}}{\rm{ }}{i_{\rm{D}}}{\rm{ }}{i_{\rm{E}}}]^T}\\{[{i_{{\rm{z}}3}}{\rm{ }}{i_{{\rm{d}}3}}{\rm{ }}{i_{{\rm{q}}3}}{\rm{ }}{i_{{\rm{o}}3}}]^T} = {R_3}(\theta ){[{i_{{\rm{z}}3}}{\rm{ }}{i_{{\rm{\alpha }}3}}{\rm{ }}{i_{{\rm{\beta }}3}}{\rm{ }}{i_{{\rm{o}}3}}]^T}\end{array} \right.$
由磁共能方法可知,三次谐波电流得到的转矩方程表达式为
(10) $\begin{array}{c}{T_{{\rm{e}}3}} = \frac{{15}}{2}{n_{\rm{p}}}{\psi _{{\rm{f}}3}}{i_{{\rm{q}}3}} + \frac{5}{2}{n_{\rm{p}}}{\psi _{{\rm{f}}1}}{i_{{\rm{z}}3}}\cos \theta + \frac{5}{2}{n_{\rm{p}}}{\psi _{{\rm{f}}1}} \times \\\;\left( {\frac{{{i_{{\rm{d}}3}}(\sin 4\theta - \sin 2\theta )}}{2} + \frac{{{i_{{\rm{q}}3}}(\cos 4\theta - \cos 2\theta )}}{2}} \right)\end{array}$
3.2 三次谐波电流注入率的选取
将式(7)和式(11)进行叠加,此时基波和三次谐波电流共同作用时所得到的电磁转矩为
(11) ${T_{\rm{e}}} = {T_{{\rm{e}}1}} + {T_{{\rm{e}}3}}$
对式(11)进行整理后,可得到转矩的平均值和各次转矩脉动分量为
(12) $\left\{ \begin{array}{l} {t_0} = \frac{5}{2}{n_{\rm{p}}}({\psi _{{\rm{f}}1}}{i_{{\rm{q}}1}} + 3{\psi _{{\rm{f}}3}}{i_{{\rm{q3}}}})\\ {t_1} = \frac{5}{2}{n_{\rm{p}}}{\psi _{{\rm{f}}1}}{i_{{\rm{z}}3}}\cos \theta \\ {t_2} = \frac{5}{2}{n_{\rm{p}}}[\frac{3}{2}{\psi _{{\rm{f}}3}}({i_{{\rm{d}}1}}\sin 2\theta - {i_{q1}}\cos 2\theta ) - \\ {\rm{ }}\frac{1}{2}{\psi _{{\rm{f}}1}}({i_{{\rm{d}}3}}\sin 2\theta - {i_{{\rm{q}}3}}\cos 2\theta )]\\ {t_3} = \frac{5}{2} \cdot 3{n_{\rm{p}}}{\psi _{{\rm{f}}3}}{i_{{\rm{z}}1}}\cos 3\theta \\ {t_4} = \frac{5}{2}{n_{\rm{p}}}[\frac{3}{2}{\psi _{{\rm{f}}3}}({i_{{\rm{d}}1}}\sin 4\theta + {i_{{\rm{q}}1}}\cos 4\theta ) + \\ {\rm{ }}\frac{1}{2}{\psi _{{\rm{f}}1}}({i_{{\rm{d}}3}}\sin 4\theta + {i_{{\rm{q}}3}}\cos 4\theta )] \end{array} \right.$
本文采用i d1 =i d3 =0的矢量控制方式,还剩余i q1 、i q3 、i z1 、i z3 四个控制自由度,定义i q3 =-3ψ f3 i q1 /ψ f1 =-k e3 i q1 ,通过调整i q1 、i q3 控制转矩平均值和转矩脉动,调整i z1 、i z3 可对定子铜耗和电磁转矩进一步优化。观察式(12)中的二次和四次转矩脉动分量,当三次谐波电流注入率满足式(13)时,此时可以将二次转矩脉动t 2 和四次转矩脉动t 4 完全抵消。
(13) ${k_{{\rm{e}}3}} = \frac{{{E_3}}}{{{E_1}}} = 3\frac{{{\psi _{{\rm{f}}3}}}}{{{\psi _{{\rm{f}}1}}}}$
3.3 最小铜耗和最大转矩原则
根据文献[11 ],三次谐波电流得到的定子绕组铜耗可用r s (i 2 d3+i 2 q3+i 2 z3)表示,其中r s 为定子电阻,当满足式(14)时,其铜耗达到最小。
(14) ${i_{{\rm{d}}3}} = 0{\rm{ }}\;\;{i_{{\rm{q}}3}} = {\rm{constant }}\;\;\;{i_{{\rm{z}}3}}{\rm{ = 0 }}$
类似地,由基波电流和三次谐波电流共同作用得到的最小总铜耗r s (i 2 q1+i 2 q3)可通过i z1 =i z3 =0实现,并且根据式(13)可知,此时一、三次转矩脉动分量t 1 =t 3 =0。
采用最小铜耗原则电机可以得到最小铜耗,但故障下剩余四相的相电流幅值分布不均匀,如果最大的相电流幅值达到功率器件所能承受的最大值时会限制电机的转矩输出能力。因此,根据文献[13 ],在电机故障下,为提高输出转矩能力,i z1 和i z3 可通过变换矩阵作用到各相电流中,对各相电流进行调节,使得剩余四相电流幅值相等。
通过对式(3)进行变换可得到,当满足式(15)时,电机故障下的剩余相电流幅值相等。
(15) ${i_{{\rm{z}}1}} = (\sqrt 5 - {\rm{2}}){i_{{\rm{q}}1}}\cos \theta {\rm{ = }}(\sqrt 5 - {\rm{2}}){i_{{\rm{\beta }}1}}$
类似地,在三次谐波电流的作用下,参考式(15)选取
(16) ${i_{{\rm{z}}3}} = (\sqrt 5 - {\rm{2}}){i_{{\rm{q}}3}}\cos 3\theta {\rm{ = }}(\sqrt 5 - {\rm{2}}){i_{{\rm{\beta }}3}}$
此时由式(12)可知,一、三次转矩脉动(式(17))也可以完全抵消。
(17) $O{t_1} + {t_3} = \frac{{5{n_{\rm{p}}}}}{2}(\sqrt 5 - 2)\cos \theta \cos 3\theta ({\psi _{{\rm{f}}1}}{i_{{\rm{q}}3}} + 3{\psi _{{\rm{f}}3}}{i_{{\rm{q}}1}}) = 0$
4 缺一相故障容错矢量控制
4.1 故障后交流参考电流的生成
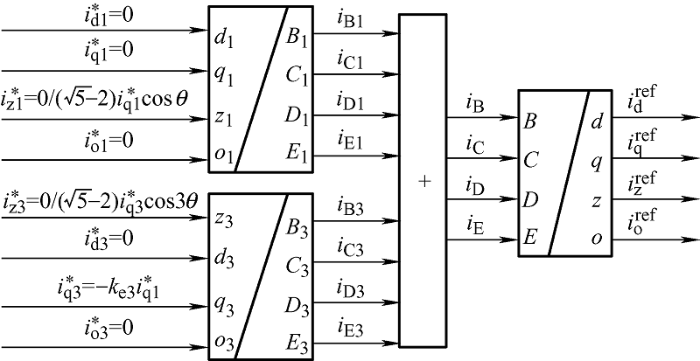
文献[10 ]研究了五相PMSM缺一相故障后同步旋转坐标系下交流参考电流信号的生成方法,其生成框图如图2 所示。
图2
图2 中,基波空间和三次谐波空间下的广义零序电流分量i z1 、i z3 可根据最小铜耗原则和最大转矩原则来进行设定,将使得转矩脉动等于零的两个子空间在同步旋转坐标系下的电流给定值经过对应的降阶逆Park和逆Clark变换矩阵转换到自然坐标系下,进行叠加后再经过基波空间的降阶Clark和Park变换矩阵变换到基波同步坐标系得到交流参考电 流值。
4.2 准比例谐振控制器的设计
电机缺一相故障后,为了抑制二次和四次转矩脉动,三次谐波电流经过降阶坐标变换生成同步坐标系下电流参考值后,d 轴以及q 轴参考电流信号中包含有二次、四次谐波分量,z 轴参考电流信号中包含有三次谐波分量。对于传统PI控制器而言,它仅可以消除直流信号的稳态误差,但是对产生转矩脉动的谐波分量没有补偿作用,而基于内模原理的比例谐振(PR)控制器可实现对交流信号的无差补偿[14 ] ,其PR控制器传递函数为
(18) ${G_{{\rm{PR}}}}(s) = {K_{\rm{p}}} + \frac{{2{K_{\rm{n}}}s}}{{{s^2} + \omega _{\rm{n}}^2}}$
式中,K p 为比例系数;K n 是谐振项系数;ω n 是谐振角频率,ω n = nω 0 ;n 为谐波次数;ω 0 为基波频率。
PR控制器在谐振频率处增益为无穷大,但由于它的带宽窄,所以仅可实现与谐振频率同频的谐波分量。实际中,电机转速通常会有一定程度的波动,电机转速的波动很有可能会使实际电流谐波分量的频率偏离谐振项的谐振频率,因此本文采用了准比例谐振(QPR)控制器,其传递函数表达式为
(19) ${G_{{\rm{QPR}}}}(s) = {K_{\rm{p}}} + \frac{{2{K_{\rm{n}}}{\omega _{{\rm{cn}}}}s}}{{{s^2} + 2{\omega _{{\rm{cn}}}}s + \omega _{\rm{n}}^2}}$
式中,ω cn 为截止频率,它可以适当地拓宽谐振频率的带宽,以至于确保稳态误差在一个理想的范围之内,并且它会根据电机实际转速的波动而进行相应的变化,因此,将避免谐振项失效的情况。
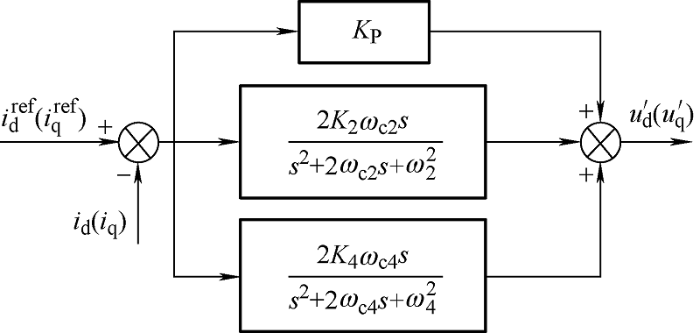
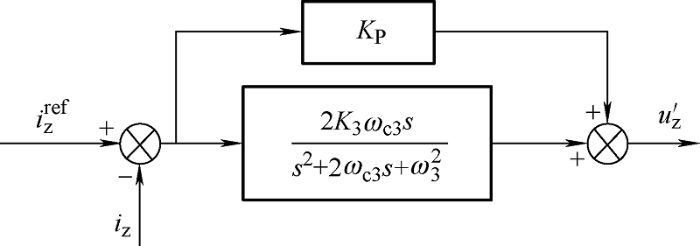
通过分析d 轴和q 轴电流参考值中包含二次及四次谐波分量,z 轴参考电流值中包含三次谐波分量,因此,本文采用两个QPR控制器分别对d 轴和q 轴的二次及四次谐波分量进行跟踪,采用一个QPR控制器对z 轴的三次谐波分量进行跟踪,控制框图如图3 和图4 所示,其中,K 2 、K 3 和K 4 分别为二次、三次和四次谐振项增益系数,ω c2 、ω c3 和ω c4 分别为二次、三次和四次谐振项截止频率,ω 2 、ω 3 和ω 4 分别为二次、三次和四次谐振频率,ω 2 =2ω 0 ,ω 3 =3ω 0 ,ω 4 =4ω 0 ,${u_d}^\prime$、${u_q}^\prime$和${u_z}^\prime$分别为d 轴、q 轴和z 轴QPR控制器输出电压。本文通过选取适当的参数实现了对交流参考电流值的精确跟踪。
图3
图4
4.3 准比例谐振控制器参数的分析与设计
在QPR控制器中有3个参数K p 、K n 和ω cn ,为了方便分析每个参数对控制器性能的影响,本文通过对3个参数进行定2变1的方法来对参数进行 分析。
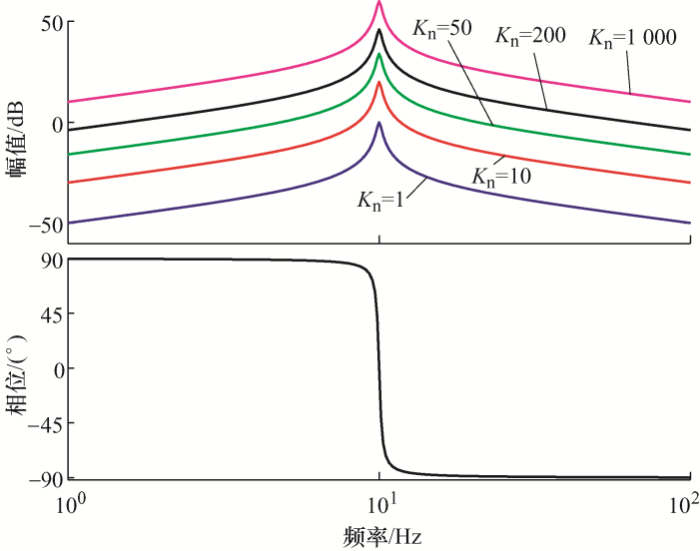
首先,固定K p 和ω cn ,考虑K n 变化对系统性能的影响。假设K p =0,ω cn =1,K n 分别取1、10、50、200、1 000时,得到QPR控制器的伯德图如图5 所示。
图5
由图5 可得到,K n 进行变化只影响QPR控制器的增益,而控制器的带宽几乎没有影响。随着K n 的增大,控制器的增益就越大,使得控制器稳态误差越小,但K n 如果过大,会使远离基频附近的谐波分量放大,因此,必须合理选取K n 。
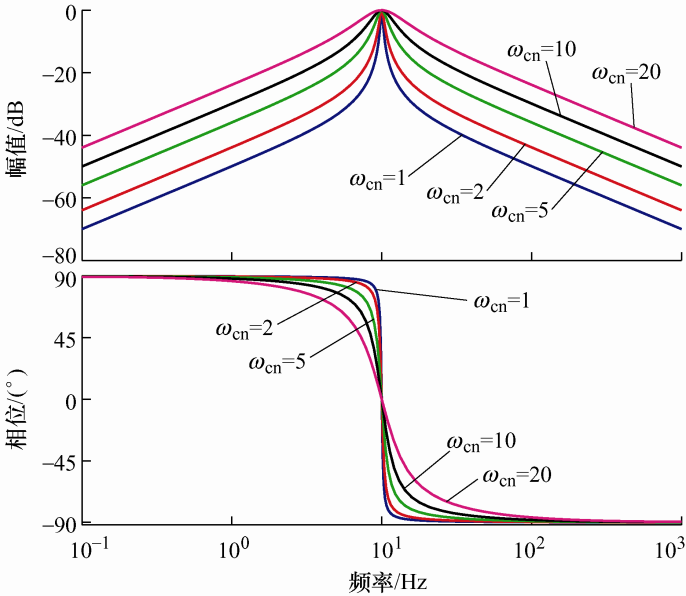
其次,固定K p 和K n ,考虑ω cn 变化对系统性能的影响。假设K p =0,K n =1,ω cn 分别取1、2、5、10、20时,得到QPR控制器的伯德图如图6 所示。
图6
由图6 可知,随着ω cn 的增大,控制器的带宽明显增大,同时,在基频附近的增益没有变化,远离基频处的增益随ω cn 的增大而增大。但如果ω cn 过大,带宽增大太多,会造成谐振点的作用被减小。因此,需要折中考虑ω cn 。
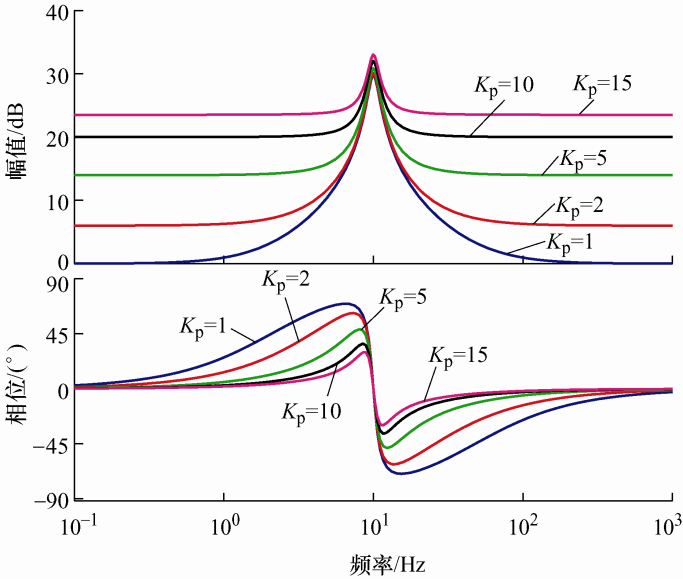
最后,固定K n 、ω cn ,考虑K p 变化对系统性能的影响。假设K n =30,ω cn =5,K p 分别取1、2、5、10、15时,得到QPR控制器的伯德图如图7 所示。
图7
由图7 可知,随着K p 的增大,控制器的增益会增大,系统的动态响应速度越快,同时,可看出,带宽会相应变窄,在基频处峰值增益增加幅度变小,如果K p 选取过大,可能会削弱谐振作用,造成系统稳定性变差。因此,必须设置合适的K p 值。
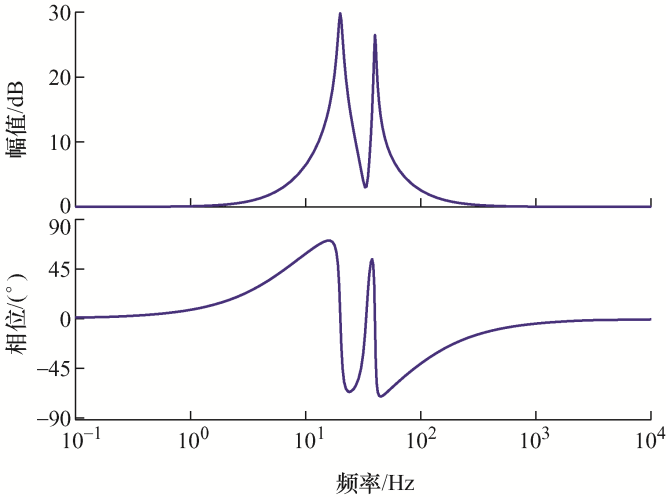
通过以上分析,并进行反复的调试,其中,以d 轴为例,d 轴上的二次谐波分量最终选取的QPR控制器参数如下:K 2 =30,ω c2 =5,K p =3,四次谐波分量最终选取参数如下:K 4 =20,ω c4 =5,K p =3,并绘制QPR控制器伯德图进行分析,q 轴和z 轴的分析过程与d 轴相同。
将d 轴的参数代入式(19),得到d 轴QPR控制器传递函数为
(20) $\begin{array}{l}{G_{QPR}}(s) = {K_{\rm{p}}} + \frac{{2{K_2}{\omega _{{\rm{c}}2}}s}}{{{s^2} + 2{\omega _{{\rm{c}}2}}s + \omega _2^2}}{\rm{ + }}\frac{{2{K_4}{\omega _{{\rm{c}}4}}s}}{{{s^2} + 2{\omega _{{\rm{c}}4}}s + \omega _4^2}} = \\3{\rm{ + }}\frac{{2 \times 30 \times 5s}}{{{s^2} + 2 \times 5s + {{(2 \times 20\pi )}^2}}}{\rm{ + }}\frac{{2 \times 20 \times 5s}}{{{s^2} + 2 \times 5s + {{(4 \times 20\pi )}^2}}}\end{array}$
通过式(20),绘制d 轴QPR控制器传递函数G QPR (s )的伯德图如图8 所示。
图8
从图8 可看出,d 轴QPR控制器在二次和四次谐波频率处都有较大的增益和较宽的带宽,说明设计的 QPR控制器在二、四次谐波频率处有较好的跟踪性能。
4.4 故障后容错矢量控制
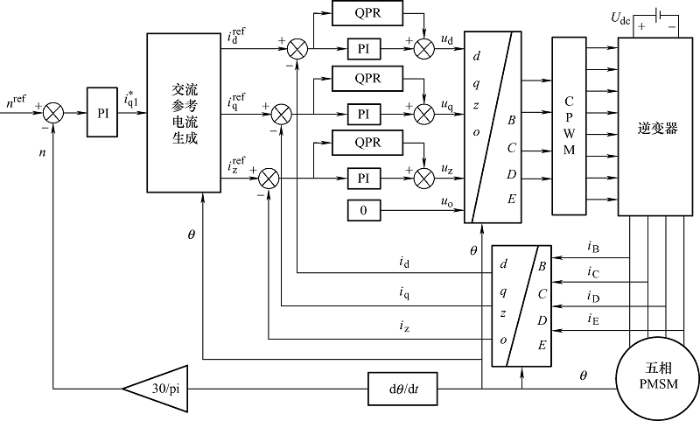
五相PMSM缺一相故障下的容错矢量控制框图如图9 所示,转速环经过PI控制器得到电流给定值i * q1,然后根据图2 中交流参考电流的生成方法分别得到d 轴、q 轴和z 轴上含有谐波分量的交流参考电流值,再经过d 轴、q 轴和z 轴上相对应的QPR+PI控制器对交流参考电流信号进行精确跟踪。
图9
5 仿真与试验结果分析
5.1 仿真结果分析
本文在Matlab/Simulink中完成了五相PMSM缺一相故障下的容错矢量控制仿真模型,并进行仿真结果分析。五相PMSM参数如表1 所示。
在电机参数中ψ f1 = 0.32 Wb,ψ f3 = 0.020 8 Wb,因此,根据三次谐波电流注入率k e3 的选取式(13),可以得到k e3 为
(21) ${k_{{\rm{e}}3}} = \frac{{{E_3}}}{{{E_1}}} = 3\frac{{{\psi _{{\rm{f3}}}}}}{{{\psi _{{\rm{f}}1}}}} = 0.195$
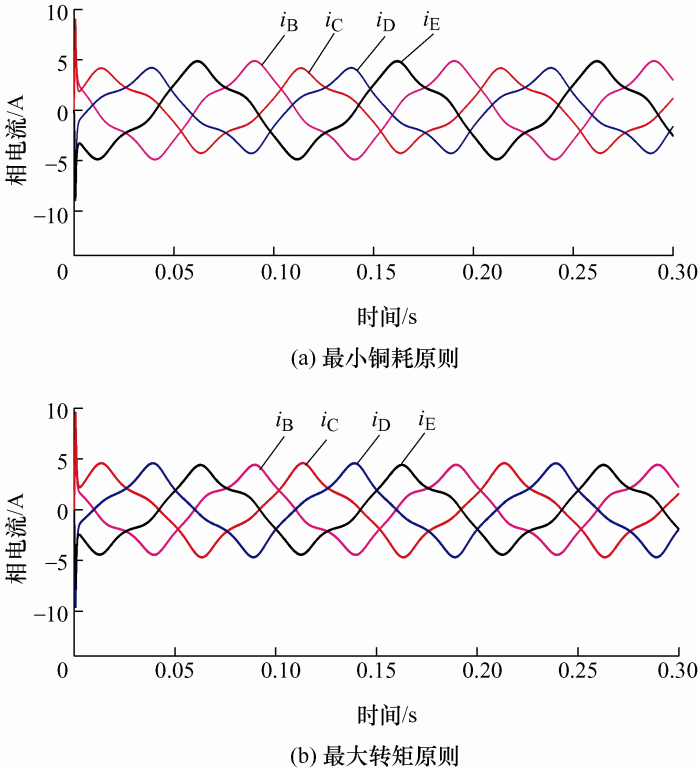
图10 a和图10 b为电机A相缺相故障下三次谐波电流注入后分别采用最小铜耗原则和最大转矩原则的相电流波形,因为在电流中注入了三次谐波电流,所以它们的相电流呈非正弦。在图10 a中,B、E两相电流幅值高于C、D两相电流幅值,其相电流幅值分布不均匀。在图10 b中,剩余各相电流幅值相等,因此提高了电机故障下的输出转矩。
图10
图10
三次谐波电流注入后采用最小铜耗和最大转矩原则相电流波形
在接下来的分析中,以最小铜耗原则为例进行分析,最大转矩原则分析与之相同。
为便于分析比较,定义转矩k 、转速脉动h 表达式分别为
(22) $k{\rm{ = }}\frac{{{T_{{\rm{e}}\max }} - {T_{{\rm{e}}\min }}}}{{{T_{{\rm{eavg}}}}}} \times 100{\rm{\% }}$
(23) $h{\rm{ = }}\frac{{{n_{\max }} - {n_{\min }}}}{{{n_{{\rm{avg}}}}}} \times 100{\rm{\% }}$
式中,T emax 、T emin 和T eavg 分别为转矩的最大、最小和平均值;n max 、n min 和n avg 分别为转速的最大、最小和平均值。
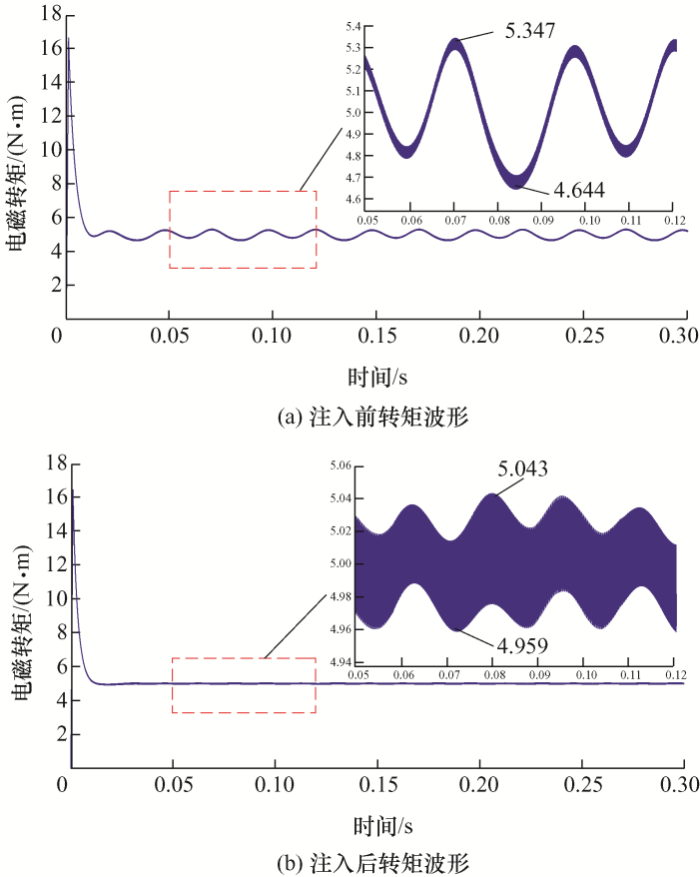
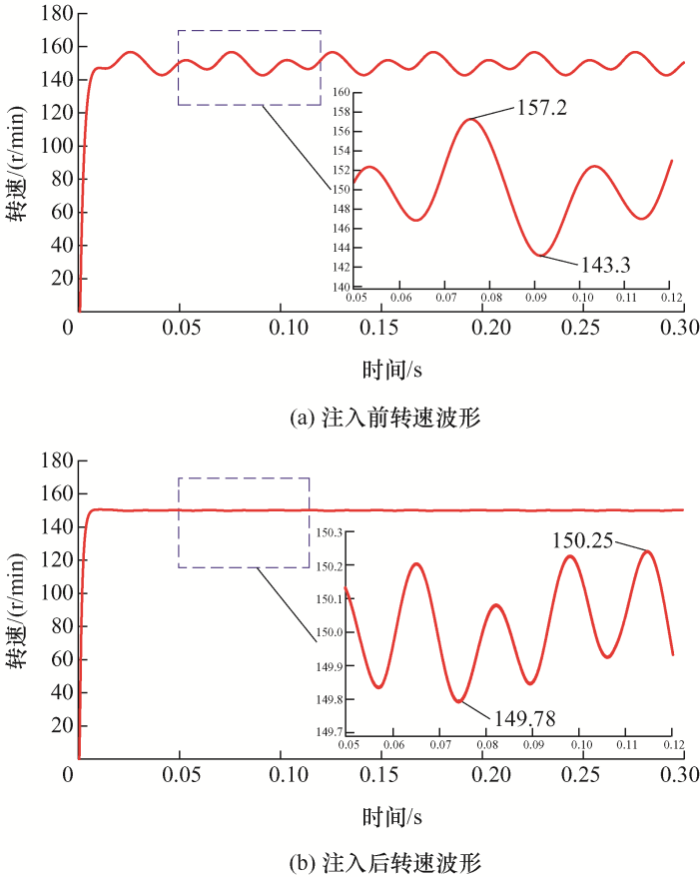
本文给定负载转矩5 N·m,给定转速150 r/min。图11 a、11b和图12 a、12b分别为三次谐波电流注入前和注入后的转矩以及转速波形,同时在图中也分别给出了各自对应的局部放大波形。根据式(22)和式(23)可得到,在三次谐波电流注入前和注入后的转矩以及转速脉动性能对比如表2 所示。从表2 得到,三次谐波电流注入前的转矩和转速中都存在较大的脉动,在三次谐波电流注入后有效地抑制了转矩和转速脉动。
图11
图12
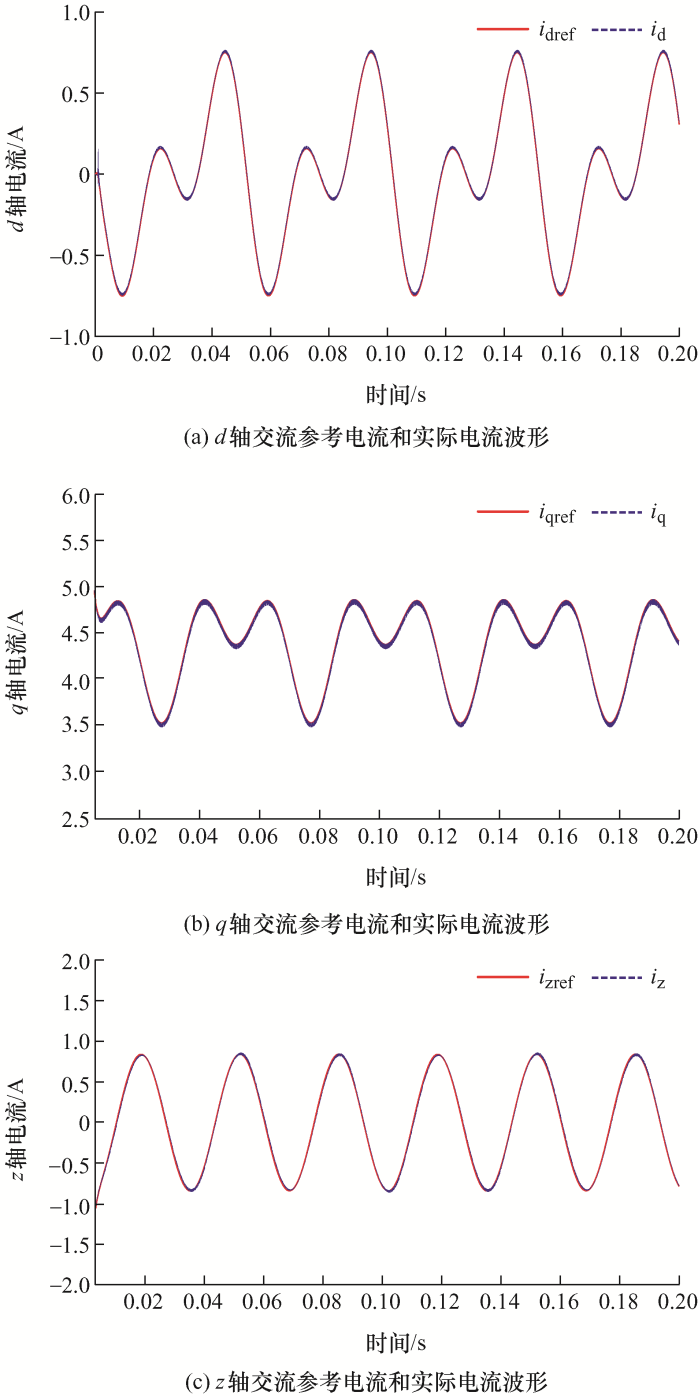
图13 是在d -q -z 同步坐标系下的交流参考电流和实际电流波形,由于在同步坐标系下参考电流信号生成时会包含有谐波分量,所以d -q -z 坐标系参考电流不是恒量。由图13 可看出,采用本文设计的QPR+PI控制器实现了对交流参考电流的精确跟踪,从而验证了本文设计的QPR+PI控制器的有效性。
图13
图13
d -q -z 坐标系下交流参考电流和实际电流波形
5.2 试验结果分析
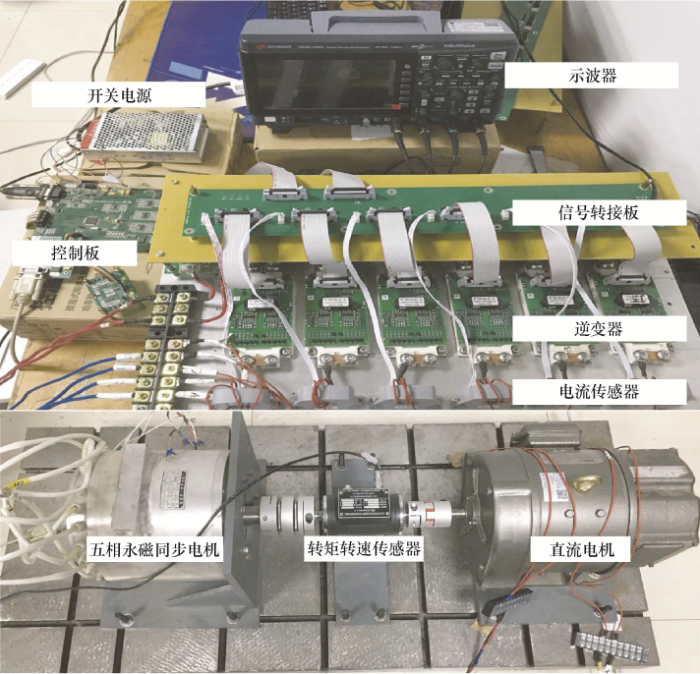
为验证上述理论分析的可行性,搭建了如图14 所示的五相 PMSM 试验平台。采用直流电机作为负载,主控制器采用英飞凌的XE164。五相PMSM的相关参数如下:定子电阻为0.5 Ω,直交轴电感为8.4 mH,电机极对数为4。试验中,开关频率为10 kHz,转速给定为150 r/min,负载转矩为5 N·m,直流母线电压200 V。
图14
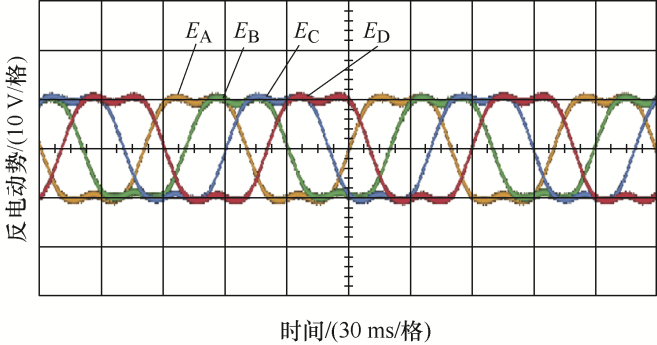
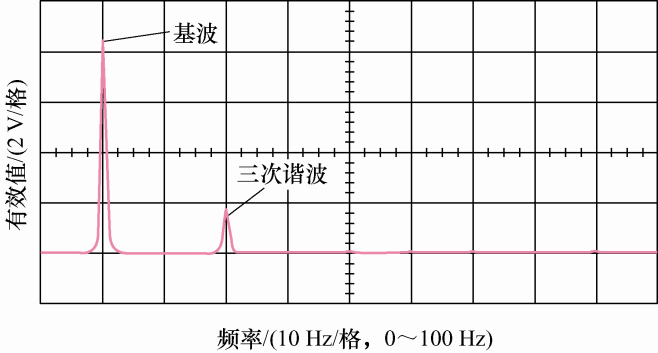
本文采用直流电机拖动五相永磁同步样机150 r/min旋转,得到电机的反电动势波形如图15 所示,可看出反电动势中存在一定含量的三次谐波,其中对B相反电动势进行了频谱分析,如图16 所示,经过分析可以得到反电动势中含有约19.5%的三次谐波分量。因此,在试验中三次谐波电流注入率取为19.5%。
图15
图16
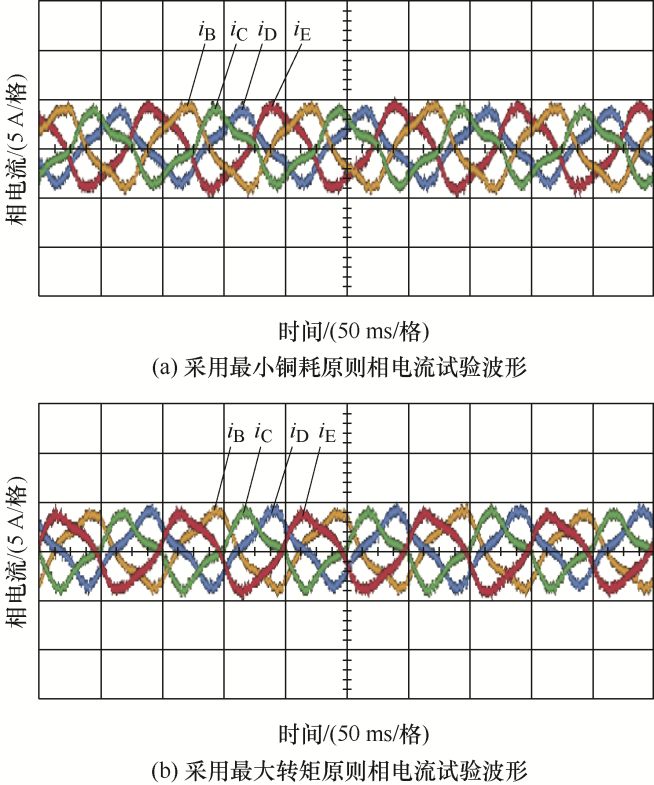
图17 a和图17 b为故障下三次谐波电流注入后分别采用最小铜耗原则和最大转矩原则的相电流试验波形,由于注入了三次谐波电流,所以剩余各相的相电流都呈非正弦。同时,图17 a采用了最小铜耗原则,其相电流幅值不相等,在图17 b采用最大转矩原则后各相电流幅值相等,可提高最大输出 转矩。
图17
图17
三次谐波电流注入后采用最小铜耗和最大转矩原则相电流试验波形
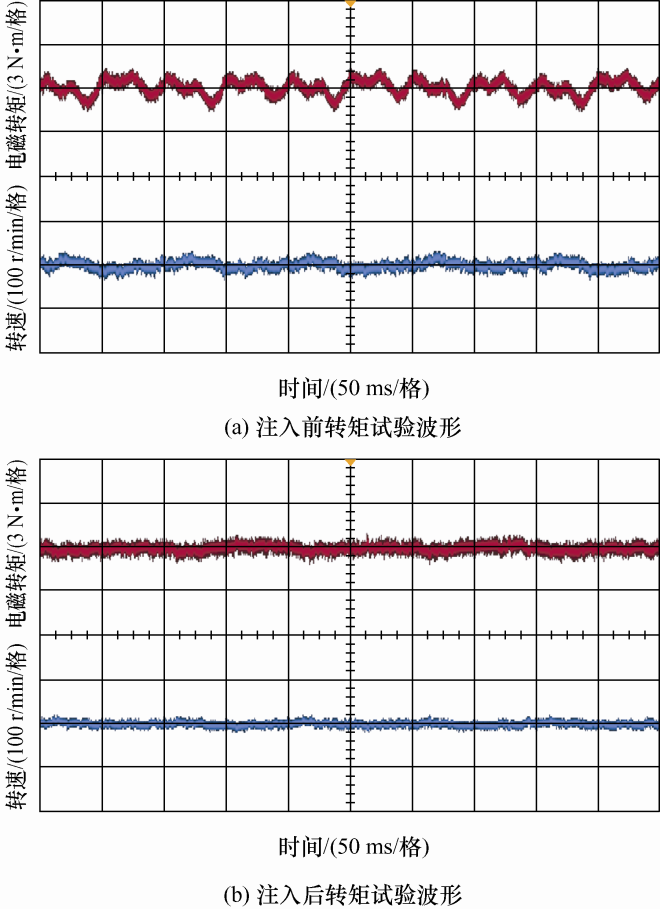
图18 a和图18 b分别为三次谐波电流注入前和注入后的转矩及转速试验波形,从两图可看出,在三次谐波电流注入前,转矩和转速波形中都会产生较大的脉动,当三次谐波电流注入后,转矩和转速脉动得到了有效的抑制。
图18
表3 为三次谐波电流注入前、后转矩和转速试验波形的脉动性能对比,其计算采用式(22)和式(23),从表3 得到,三次谐波电流注入后转矩脉动可降低53.6%,转速脉动可降低54.1%,验证了理论分析的有效性。
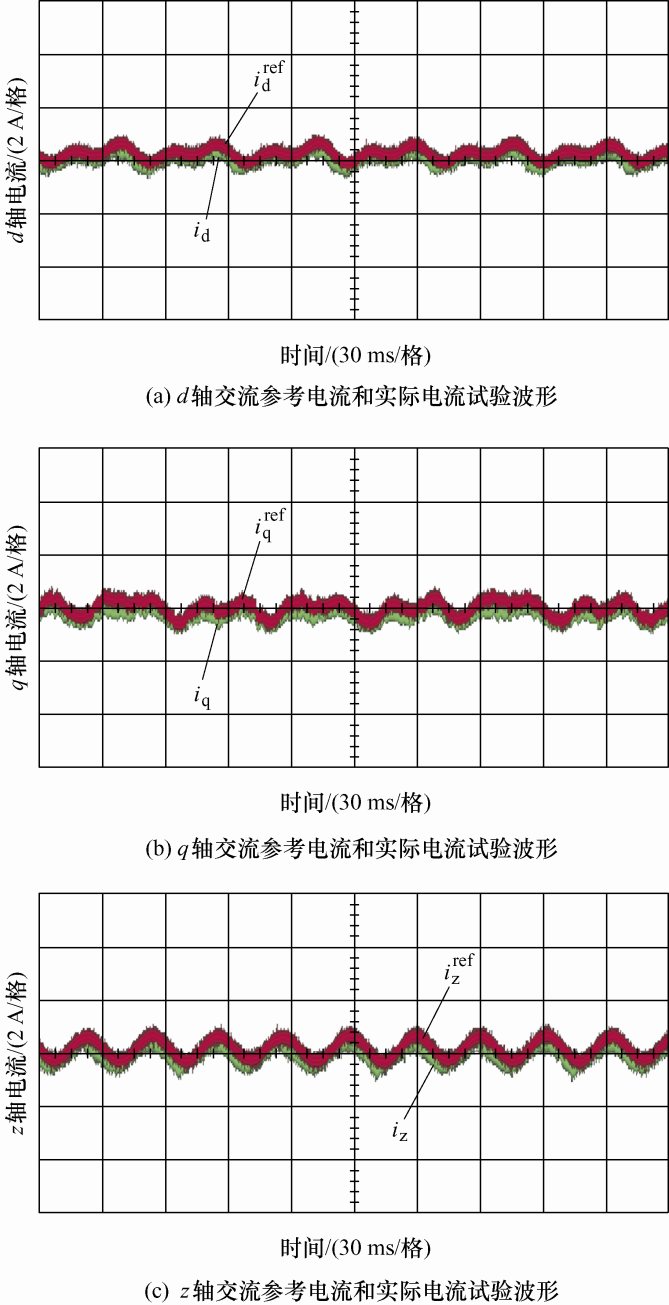
图19 为d -q -z 同步坐标系下的交流参考电流和实际电流试验波形,由图19 可看出,d 轴、q 轴和z 轴的实际电流都能够成功跟踪上各自的参考电流信号,说明本文设计的QPR+PI控制器对于交流参考电流有很好的跟踪效果。
图19
图19
d -q -z 坐标系下交流参考电流和实际电流试验波形
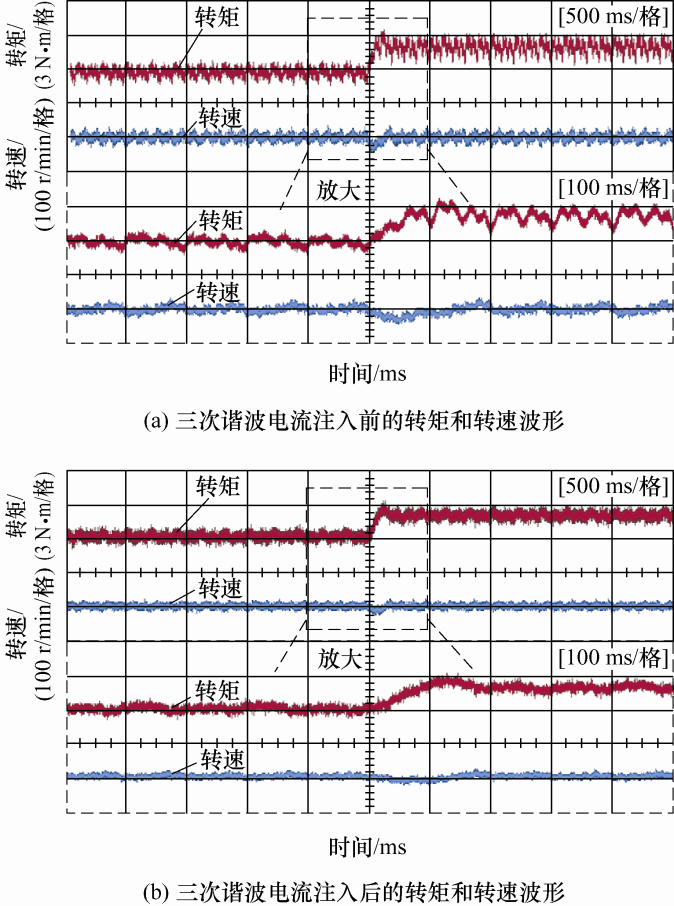
为了验证理论分析的动态性能,图20 a和图20 b给出了负载转矩从3 N·m突加到5 N·m时三次谐波电流注入前、后的转矩和转速波形,并给出了对应的局部放大波形。从两图可看出,三次谐波电流注入前,突加负载转矩时,转矩和转速依然存在较大脉动,三次谐波电流注入后,转矩和转速脉动得到明显减小,且突加负载转矩时,转矩和转速脉动同样可以有效抑制;同时可以看到,转速经过快速的调节后达到稳定值。
图20
图20
突加负载转矩时三次谐波电流注入前、后的转矩和转速试验波形
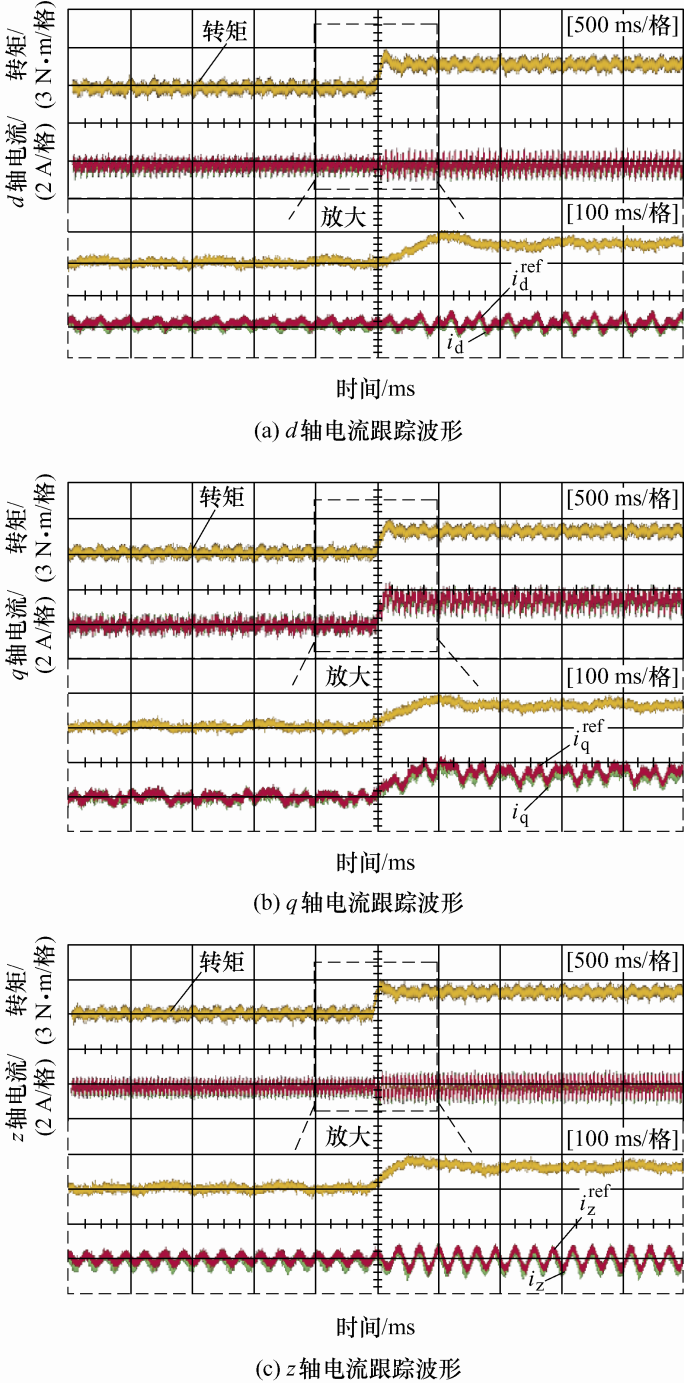
图21 给出了负载转矩从3 N·m突加到5 N·m时d 、q 和z 轴上交流参考电流和实际电流的跟踪波形,并给出了对应的局部放大波形。从图21 中可看出,突加负载转矩后,d 、q 和z 轴上的实际电流都能很好地跟踪上参考电流,说明QPR+PI控制器具有较好的动态性能。
图21
图21
突加负载转矩时d 、q 和z轴参考电流和实际电流跟踪波形
6 结论
本文针对非正弦反电动势五相永磁同步电机,在缺一相故障状态下,为了消除故障后产生的二次和四次转矩脉动分量,分析了三次谐波电流注入率的选取方法。针对传统PI控制器不能对交流信号进行精确跟踪问题,设计了QPR+PI控制器来对交流参考电流进行精确跟踪。通过仿真和试验验证对容错矢量控制策略进行了深入研究,具体结论如下所示。
(1) 从试验中可知,三次谐波电流注入前转矩脉动为58.2%,三次谐波电流注入后转矩脉动降低到27%,因此,电机故障后转矩脉动得到了有效的 抑制。
(2) 通过仿真和试验得到,本文设计的QPR+PI控制器对交流参考电流有着很好的跟踪性能,验证了QPR+PI控制器的有效性。
(3) 通过突加、减负载转矩对理论分析的动态性能进行了验证,结果表明该系统具有较好的动态性能。
参考文献
View Option
[1]
JUNG E YOO H SUL S , et al . A nine-phase permanent-magnet motor drive system for an ultrahigh-speed elevator
[J]. IEEE Transactions on Industry Applications , 2012 , 48 (3 ):987 -995 .
DOI:10.1109/TIA.2012.2190472
URL
[本文引用: 1]
[2]
赵品志 , 杨贵杰 , 李勇 . 三次谐波注入式五相永磁同步电机转矩密度优化
[J]. 中国电机工程学报 , 2010 , 30 (33 ):71 -77 .
[本文引用: 1]
ZHAO Pinzhi YANG Guijie LI Yong . Torque density optimization for five-phase PMSM with third harmonic injection
[J]. Proceedings of the CSEE , 2010 , 30 (33 ):71 -77 .
[本文引用: 1]
[3]
薛诚 , 宋文胜 , 冯晓云 . 五相永磁同步电机多目标优化直接转矩控制算法
[J]. 中国电机工程学报 , 2016 , 36 (6 ):1695 -1704 .
[本文引用: 1]
XUE Cheng SONG Wensheng FENG Xiaoyun . A direct torque control algorithm of five-phase permanent-magnet machines with multi-objective optimization
[J]. Proceedings of the CSEE , 2016 , 36 (6 ):1695 -1704 .
[本文引用: 1]
[4]
LIU G SONG C CHEN Q . FCS-MPC-based fault-tolerant control of five-phase IPMSM for MTPA operation
[J]. IEEE Transactions on Power Electronics , 2020 , 35 (3 ):2882 -2894 .
DOI:10.1109/TPEL.63
URL
[本文引用: 1]
[5]
TIAN B AN Q DUAN J , et al . Cancellation of torque ripples with FOC strategy under two phase failures of five-phase PM motor
[J]. IEEE Transactions on Power Electronics , 2017 , 32 (7 ):5459 -5472 .
DOI:10.1109/TPEL.2016.2598778
URL
[本文引用: 1]
[6]
熊聪 , 许海平 , 周鹏 , 等 . 五相永磁同步电机单相开路故障的容错矢量控制策略
[J]. 中国电机工程学报 , 2019 , 39 (23 ):7055 -7064 .
[本文引用: 1]
XIONG Cong XU Haiping ZHOU Peng , et al . Fault-tolerant field oriented control for five-phase permanent-magnet motors under single phase open fault
[J]. Proceedings of the CSEE , 2019 , 39 (23 ):7055 -7064 .
[本文引用: 1]
[7]
BERMUDEZ M GONZALEZ-PRIETO I BARRERO F , et al . An experimental assessment of open-phase fault-tolerant virtual-vector-based direct torque control in five-phase induction motor drives
[J]. IEEE Transactions on Power Electronics , 2018 , 33 (3 ):2774 -2784 .
DOI:10.1109/TPEL.2017.2711531
URL
[本文引用: 1]
[8]
TIAN B AN Q DUAN J , et al . Decoupled modeling and nonlinear speed control for five-phase PM motor under single-phase open fault
[J]. IEEE Transactions on Power Electronics , 2017 , 32 (7 ):5473 -5486 .
DOI:10.1109/TPEL.2016.2611532
URL
[本文引用: 1]
[9]
DWARI S PARSA L . Fault-tolerant control of five-phase permanent-magnet motors with trapezoidal back EMF
[J]. IEEE Transactions on Industrial Electronics , 2011 , 58 (2 ):476 -485 .
DOI:10.1109/TIE.2010.2045322
URL
[本文引用: 1]
[10]
LIU G LIN Z ZHAO W , et al . Third harmonic current injection in fault-tolerant five-phase permanent-magnet motor drive
[J]. IEEE Transactions on Power Electronics , 2018 , 33 (8 ):6970 -6979 .
DOI:10.1109/TPEL.2017.2762320
URL
[本文引用: 3]
[11]
MOHAMMADPOUR A PARSA L . Global fault-tolerant control technique for multiphase permanent-magnet machines
[J]. IEEE Transactions on Industry Applications , 2015 , 51 (1 ):178 -186 .
DOI:10.1109/TIA.2014.2326084
URL
[本文引用: 2]
[12]
SALEHIFAR M SALEHI ARASHLOO R MORENO-EGUILAZ M , et al . Observer-based open transistor fault diagnosis and fault-tolerant control of five-phase permanent magnet motor drive for application in electric vehicles
[J]. IET Power Electronics , 2015 , 8 (1 ):76 -87 .
DOI:10.1049/pel2.v8.1
URL
[本文引用: 1]
[13]
赵品志 , 杨贵杰 , 李勇 . 五相永磁同步电动机单相开路故障的容错控制策略
[J]. 中国电机工程学报 , 2011 , 31 (24 ):68 -76 .
[本文引用: 1]
ZHAO Pinzhi YANG Guijie LI Yong . Fault-tolerant control strategy for five-phase permanent magnetic synchronous motor under single phase open-circuit fault condition
[J]. Proceedings of the CSEE , 2011 , 31 (24 ):68 -76 .
[本文引用: 1]
[14]
YEPES A G FREIJEDO F D DOVAL-GANDOY J , et al . Effects of discretization methods on the performance of resonant controllers
[J]. IEEE Transactions on Power Electronics , 2010 , 25 (7 ):1692 -1712 .
DOI:10.1109/TPEL.2010.2041256
URL
[本文引用: 1]
A nine-phase permanent-magnet motor drive system for an ultrahigh-speed elevator
1
2012
... 近年来,多相永磁同步电机(Permanent magnet synchronous machine,PMSM)受到了工业和学术界的广泛关注.相对于三相电机,多相电机具有低压大功率输出、高可靠性以及适于容错运行等特性,在航空航天、舰艇舰船、风力发电等领域得到了越来越多的认可[1 ,2 ,3 ] .对于多相电机而言,故障容错运行是一个显著优势.当电机发生缺相故障时,不需要改动任何硬件电路,仅需选择适当的容错控制策略便可降额继续运行,此时避免了停机或系统重组[4 ,5 ,6 ] .针对非正弦反电动势五相PMSM缺相容错运行,国内外学者对降阶解耦模型的磁场定向控制(Field-oriented control,FOC)进行了大量的研究.文献[7 ]通过构建降阶Clark变换矩阵,建立了五相PMSM故障后的解耦模型,其解耦模型将使同步坐标系下的转矩及电压方程与正常状态一致,但磁场中存在的三次谐波会导致转矩脉动.文献[8 ]为抑制故障后产生的转矩脉动,构建同步坐标系下的解耦模型,在速度环采用了滑模控制,但它会使得系统产生抖动,并且控制器的设计较复杂.为此,文献[9 ]采用三次谐波电流注入法来抑制转矩脉动,根据瞬时功率理论和电机反电动势信息,可计算得到故障后的平均转矩和脉动转矩分量,令转矩脉动分量为零,得到基波和三次谐波电流参考值,该方法计算过程复杂,无法在线生成参考电流信号.文献[10 ]给出了单相开路故障后三次谐波电流的注入和在线计算方法,有效地抑制三次谐波磁链引起的转矩脉动,但选用传统PI控制器,其对交流参考电流值的跟踪没有达到最佳效果. ...
三次谐波注入式五相永磁同步电机转矩密度优化
1
2010
... 近年来,多相永磁同步电机(Permanent magnet synchronous machine,PMSM)受到了工业和学术界的广泛关注.相对于三相电机,多相电机具有低压大功率输出、高可靠性以及适于容错运行等特性,在航空航天、舰艇舰船、风力发电等领域得到了越来越多的认可[1 ,2 ,3 ] .对于多相电机而言,故障容错运行是一个显著优势.当电机发生缺相故障时,不需要改动任何硬件电路,仅需选择适当的容错控制策略便可降额继续运行,此时避免了停机或系统重组[4 ,5 ,6 ] .针对非正弦反电动势五相PMSM缺相容错运行,国内外学者对降阶解耦模型的磁场定向控制(Field-oriented control,FOC)进行了大量的研究.文献[7 ]通过构建降阶Clark变换矩阵,建立了五相PMSM故障后的解耦模型,其解耦模型将使同步坐标系下的转矩及电压方程与正常状态一致,但磁场中存在的三次谐波会导致转矩脉动.文献[8 ]为抑制故障后产生的转矩脉动,构建同步坐标系下的解耦模型,在速度环采用了滑模控制,但它会使得系统产生抖动,并且控制器的设计较复杂.为此,文献[9 ]采用三次谐波电流注入法来抑制转矩脉动,根据瞬时功率理论和电机反电动势信息,可计算得到故障后的平均转矩和脉动转矩分量,令转矩脉动分量为零,得到基波和三次谐波电流参考值,该方法计算过程复杂,无法在线生成参考电流信号.文献[10 ]给出了单相开路故障后三次谐波电流的注入和在线计算方法,有效地抑制三次谐波磁链引起的转矩脉动,但选用传统PI控制器,其对交流参考电流值的跟踪没有达到最佳效果. ...
三次谐波注入式五相永磁同步电机转矩密度优化
1
2010
... 近年来,多相永磁同步电机(Permanent magnet synchronous machine,PMSM)受到了工业和学术界的广泛关注.相对于三相电机,多相电机具有低压大功率输出、高可靠性以及适于容错运行等特性,在航空航天、舰艇舰船、风力发电等领域得到了越来越多的认可[1 ,2 ,3 ] .对于多相电机而言,故障容错运行是一个显著优势.当电机发生缺相故障时,不需要改动任何硬件电路,仅需选择适当的容错控制策略便可降额继续运行,此时避免了停机或系统重组[4 ,5 ,6 ] .针对非正弦反电动势五相PMSM缺相容错运行,国内外学者对降阶解耦模型的磁场定向控制(Field-oriented control,FOC)进行了大量的研究.文献[7 ]通过构建降阶Clark变换矩阵,建立了五相PMSM故障后的解耦模型,其解耦模型将使同步坐标系下的转矩及电压方程与正常状态一致,但磁场中存在的三次谐波会导致转矩脉动.文献[8 ]为抑制故障后产生的转矩脉动,构建同步坐标系下的解耦模型,在速度环采用了滑模控制,但它会使得系统产生抖动,并且控制器的设计较复杂.为此,文献[9 ]采用三次谐波电流注入法来抑制转矩脉动,根据瞬时功率理论和电机反电动势信息,可计算得到故障后的平均转矩和脉动转矩分量,令转矩脉动分量为零,得到基波和三次谐波电流参考值,该方法计算过程复杂,无法在线生成参考电流信号.文献[10 ]给出了单相开路故障后三次谐波电流的注入和在线计算方法,有效地抑制三次谐波磁链引起的转矩脉动,但选用传统PI控制器,其对交流参考电流值的跟踪没有达到最佳效果. ...
五相永磁同步电机多目标优化直接转矩控制算法
1
2016
... 近年来,多相永磁同步电机(Permanent magnet synchronous machine,PMSM)受到了工业和学术界的广泛关注.相对于三相电机,多相电机具有低压大功率输出、高可靠性以及适于容错运行等特性,在航空航天、舰艇舰船、风力发电等领域得到了越来越多的认可[1 ,2 ,3 ] .对于多相电机而言,故障容错运行是一个显著优势.当电机发生缺相故障时,不需要改动任何硬件电路,仅需选择适当的容错控制策略便可降额继续运行,此时避免了停机或系统重组[4 ,5 ,6 ] .针对非正弦反电动势五相PMSM缺相容错运行,国内外学者对降阶解耦模型的磁场定向控制(Field-oriented control,FOC)进行了大量的研究.文献[7 ]通过构建降阶Clark变换矩阵,建立了五相PMSM故障后的解耦模型,其解耦模型将使同步坐标系下的转矩及电压方程与正常状态一致,但磁场中存在的三次谐波会导致转矩脉动.文献[8 ]为抑制故障后产生的转矩脉动,构建同步坐标系下的解耦模型,在速度环采用了滑模控制,但它会使得系统产生抖动,并且控制器的设计较复杂.为此,文献[9 ]采用三次谐波电流注入法来抑制转矩脉动,根据瞬时功率理论和电机反电动势信息,可计算得到故障后的平均转矩和脉动转矩分量,令转矩脉动分量为零,得到基波和三次谐波电流参考值,该方法计算过程复杂,无法在线生成参考电流信号.文献[10 ]给出了单相开路故障后三次谐波电流的注入和在线计算方法,有效地抑制三次谐波磁链引起的转矩脉动,但选用传统PI控制器,其对交流参考电流值的跟踪没有达到最佳效果. ...
五相永磁同步电机多目标优化直接转矩控制算法
1
2016
... 近年来,多相永磁同步电机(Permanent magnet synchronous machine,PMSM)受到了工业和学术界的广泛关注.相对于三相电机,多相电机具有低压大功率输出、高可靠性以及适于容错运行等特性,在航空航天、舰艇舰船、风力发电等领域得到了越来越多的认可[1 ,2 ,3 ] .对于多相电机而言,故障容错运行是一个显著优势.当电机发生缺相故障时,不需要改动任何硬件电路,仅需选择适当的容错控制策略便可降额继续运行,此时避免了停机或系统重组[4 ,5 ,6 ] .针对非正弦反电动势五相PMSM缺相容错运行,国内外学者对降阶解耦模型的磁场定向控制(Field-oriented control,FOC)进行了大量的研究.文献[7 ]通过构建降阶Clark变换矩阵,建立了五相PMSM故障后的解耦模型,其解耦模型将使同步坐标系下的转矩及电压方程与正常状态一致,但磁场中存在的三次谐波会导致转矩脉动.文献[8 ]为抑制故障后产生的转矩脉动,构建同步坐标系下的解耦模型,在速度环采用了滑模控制,但它会使得系统产生抖动,并且控制器的设计较复杂.为此,文献[9 ]采用三次谐波电流注入法来抑制转矩脉动,根据瞬时功率理论和电机反电动势信息,可计算得到故障后的平均转矩和脉动转矩分量,令转矩脉动分量为零,得到基波和三次谐波电流参考值,该方法计算过程复杂,无法在线生成参考电流信号.文献[10 ]给出了单相开路故障后三次谐波电流的注入和在线计算方法,有效地抑制三次谐波磁链引起的转矩脉动,但选用传统PI控制器,其对交流参考电流值的跟踪没有达到最佳效果. ...
FCS-MPC-based fault-tolerant control of five-phase IPMSM for MTPA operation
1
2020
... 近年来,多相永磁同步电机(Permanent magnet synchronous machine,PMSM)受到了工业和学术界的广泛关注.相对于三相电机,多相电机具有低压大功率输出、高可靠性以及适于容错运行等特性,在航空航天、舰艇舰船、风力发电等领域得到了越来越多的认可[1 ,2 ,3 ] .对于多相电机而言,故障容错运行是一个显著优势.当电机发生缺相故障时,不需要改动任何硬件电路,仅需选择适当的容错控制策略便可降额继续运行,此时避免了停机或系统重组[4 ,5 ,6 ] .针对非正弦反电动势五相PMSM缺相容错运行,国内外学者对降阶解耦模型的磁场定向控制(Field-oriented control,FOC)进行了大量的研究.文献[7 ]通过构建降阶Clark变换矩阵,建立了五相PMSM故障后的解耦模型,其解耦模型将使同步坐标系下的转矩及电压方程与正常状态一致,但磁场中存在的三次谐波会导致转矩脉动.文献[8 ]为抑制故障后产生的转矩脉动,构建同步坐标系下的解耦模型,在速度环采用了滑模控制,但它会使得系统产生抖动,并且控制器的设计较复杂.为此,文献[9 ]采用三次谐波电流注入法来抑制转矩脉动,根据瞬时功率理论和电机反电动势信息,可计算得到故障后的平均转矩和脉动转矩分量,令转矩脉动分量为零,得到基波和三次谐波电流参考值,该方法计算过程复杂,无法在线生成参考电流信号.文献[10 ]给出了单相开路故障后三次谐波电流的注入和在线计算方法,有效地抑制三次谐波磁链引起的转矩脉动,但选用传统PI控制器,其对交流参考电流值的跟踪没有达到最佳效果. ...
Cancellation of torque ripples with FOC strategy under two phase failures of five-phase PM motor
1
2017
... 近年来,多相永磁同步电机(Permanent magnet synchronous machine,PMSM)受到了工业和学术界的广泛关注.相对于三相电机,多相电机具有低压大功率输出、高可靠性以及适于容错运行等特性,在航空航天、舰艇舰船、风力发电等领域得到了越来越多的认可[1 ,2 ,3 ] .对于多相电机而言,故障容错运行是一个显著优势.当电机发生缺相故障时,不需要改动任何硬件电路,仅需选择适当的容错控制策略便可降额继续运行,此时避免了停机或系统重组[4 ,5 ,6 ] .针对非正弦反电动势五相PMSM缺相容错运行,国内外学者对降阶解耦模型的磁场定向控制(Field-oriented control,FOC)进行了大量的研究.文献[7 ]通过构建降阶Clark变换矩阵,建立了五相PMSM故障后的解耦模型,其解耦模型将使同步坐标系下的转矩及电压方程与正常状态一致,但磁场中存在的三次谐波会导致转矩脉动.文献[8 ]为抑制故障后产生的转矩脉动,构建同步坐标系下的解耦模型,在速度环采用了滑模控制,但它会使得系统产生抖动,并且控制器的设计较复杂.为此,文献[9 ]采用三次谐波电流注入法来抑制转矩脉动,根据瞬时功率理论和电机反电动势信息,可计算得到故障后的平均转矩和脉动转矩分量,令转矩脉动分量为零,得到基波和三次谐波电流参考值,该方法计算过程复杂,无法在线生成参考电流信号.文献[10 ]给出了单相开路故障后三次谐波电流的注入和在线计算方法,有效地抑制三次谐波磁链引起的转矩脉动,但选用传统PI控制器,其对交流参考电流值的跟踪没有达到最佳效果. ...
五相永磁同步电机单相开路故障的容错矢量控制策略
1
2019
... 近年来,多相永磁同步电机(Permanent magnet synchronous machine,PMSM)受到了工业和学术界的广泛关注.相对于三相电机,多相电机具有低压大功率输出、高可靠性以及适于容错运行等特性,在航空航天、舰艇舰船、风力发电等领域得到了越来越多的认可[1 ,2 ,3 ] .对于多相电机而言,故障容错运行是一个显著优势.当电机发生缺相故障时,不需要改动任何硬件电路,仅需选择适当的容错控制策略便可降额继续运行,此时避免了停机或系统重组[4 ,5 ,6 ] .针对非正弦反电动势五相PMSM缺相容错运行,国内外学者对降阶解耦模型的磁场定向控制(Field-oriented control,FOC)进行了大量的研究.文献[7 ]通过构建降阶Clark变换矩阵,建立了五相PMSM故障后的解耦模型,其解耦模型将使同步坐标系下的转矩及电压方程与正常状态一致,但磁场中存在的三次谐波会导致转矩脉动.文献[8 ]为抑制故障后产生的转矩脉动,构建同步坐标系下的解耦模型,在速度环采用了滑模控制,但它会使得系统产生抖动,并且控制器的设计较复杂.为此,文献[9 ]采用三次谐波电流注入法来抑制转矩脉动,根据瞬时功率理论和电机反电动势信息,可计算得到故障后的平均转矩和脉动转矩分量,令转矩脉动分量为零,得到基波和三次谐波电流参考值,该方法计算过程复杂,无法在线生成参考电流信号.文献[10 ]给出了单相开路故障后三次谐波电流的注入和在线计算方法,有效地抑制三次谐波磁链引起的转矩脉动,但选用传统PI控制器,其对交流参考电流值的跟踪没有达到最佳效果. ...
五相永磁同步电机单相开路故障的容错矢量控制策略
1
2019
... 近年来,多相永磁同步电机(Permanent magnet synchronous machine,PMSM)受到了工业和学术界的广泛关注.相对于三相电机,多相电机具有低压大功率输出、高可靠性以及适于容错运行等特性,在航空航天、舰艇舰船、风力发电等领域得到了越来越多的认可[1 ,2 ,3 ] .对于多相电机而言,故障容错运行是一个显著优势.当电机发生缺相故障时,不需要改动任何硬件电路,仅需选择适当的容错控制策略便可降额继续运行,此时避免了停机或系统重组[4 ,5 ,6 ] .针对非正弦反电动势五相PMSM缺相容错运行,国内外学者对降阶解耦模型的磁场定向控制(Field-oriented control,FOC)进行了大量的研究.文献[7 ]通过构建降阶Clark变换矩阵,建立了五相PMSM故障后的解耦模型,其解耦模型将使同步坐标系下的转矩及电压方程与正常状态一致,但磁场中存在的三次谐波会导致转矩脉动.文献[8 ]为抑制故障后产生的转矩脉动,构建同步坐标系下的解耦模型,在速度环采用了滑模控制,但它会使得系统产生抖动,并且控制器的设计较复杂.为此,文献[9 ]采用三次谐波电流注入法来抑制转矩脉动,根据瞬时功率理论和电机反电动势信息,可计算得到故障后的平均转矩和脉动转矩分量,令转矩脉动分量为零,得到基波和三次谐波电流参考值,该方法计算过程复杂,无法在线生成参考电流信号.文献[10 ]给出了单相开路故障后三次谐波电流的注入和在线计算方法,有效地抑制三次谐波磁链引起的转矩脉动,但选用传统PI控制器,其对交流参考电流值的跟踪没有达到最佳效果. ...
An experimental assessment of open-phase fault-tolerant virtual-vector-based direct torque control in five-phase induction motor drives
1
2018
... 近年来,多相永磁同步电机(Permanent magnet synchronous machine,PMSM)受到了工业和学术界的广泛关注.相对于三相电机,多相电机具有低压大功率输出、高可靠性以及适于容错运行等特性,在航空航天、舰艇舰船、风力发电等领域得到了越来越多的认可[1 ,2 ,3 ] .对于多相电机而言,故障容错运行是一个显著优势.当电机发生缺相故障时,不需要改动任何硬件电路,仅需选择适当的容错控制策略便可降额继续运行,此时避免了停机或系统重组[4 ,5 ,6 ] .针对非正弦反电动势五相PMSM缺相容错运行,国内外学者对降阶解耦模型的磁场定向控制(Field-oriented control,FOC)进行了大量的研究.文献[7 ]通过构建降阶Clark变换矩阵,建立了五相PMSM故障后的解耦模型,其解耦模型将使同步坐标系下的转矩及电压方程与正常状态一致,但磁场中存在的三次谐波会导致转矩脉动.文献[8 ]为抑制故障后产生的转矩脉动,构建同步坐标系下的解耦模型,在速度环采用了滑模控制,但它会使得系统产生抖动,并且控制器的设计较复杂.为此,文献[9 ]采用三次谐波电流注入法来抑制转矩脉动,根据瞬时功率理论和电机反电动势信息,可计算得到故障后的平均转矩和脉动转矩分量,令转矩脉动分量为零,得到基波和三次谐波电流参考值,该方法计算过程复杂,无法在线生成参考电流信号.文献[10 ]给出了单相开路故障后三次谐波电流的注入和在线计算方法,有效地抑制三次谐波磁链引起的转矩脉动,但选用传统PI控制器,其对交流参考电流值的跟踪没有达到最佳效果. ...
Decoupled modeling and nonlinear speed control for five-phase PM motor under single-phase open fault
1
2017
... 近年来,多相永磁同步电机(Permanent magnet synchronous machine,PMSM)受到了工业和学术界的广泛关注.相对于三相电机,多相电机具有低压大功率输出、高可靠性以及适于容错运行等特性,在航空航天、舰艇舰船、风力发电等领域得到了越来越多的认可[1 ,2 ,3 ] .对于多相电机而言,故障容错运行是一个显著优势.当电机发生缺相故障时,不需要改动任何硬件电路,仅需选择适当的容错控制策略便可降额继续运行,此时避免了停机或系统重组[4 ,5 ,6 ] .针对非正弦反电动势五相PMSM缺相容错运行,国内外学者对降阶解耦模型的磁场定向控制(Field-oriented control,FOC)进行了大量的研究.文献[7 ]通过构建降阶Clark变换矩阵,建立了五相PMSM故障后的解耦模型,其解耦模型将使同步坐标系下的转矩及电压方程与正常状态一致,但磁场中存在的三次谐波会导致转矩脉动.文献[8 ]为抑制故障后产生的转矩脉动,构建同步坐标系下的解耦模型,在速度环采用了滑模控制,但它会使得系统产生抖动,并且控制器的设计较复杂.为此,文献[9 ]采用三次谐波电流注入法来抑制转矩脉动,根据瞬时功率理论和电机反电动势信息,可计算得到故障后的平均转矩和脉动转矩分量,令转矩脉动分量为零,得到基波和三次谐波电流参考值,该方法计算过程复杂,无法在线生成参考电流信号.文献[10 ]给出了单相开路故障后三次谐波电流的注入和在线计算方法,有效地抑制三次谐波磁链引起的转矩脉动,但选用传统PI控制器,其对交流参考电流值的跟踪没有达到最佳效果. ...
Fault-tolerant control of five-phase permanent-magnet motors with trapezoidal back EMF
1
2011
... 近年来,多相永磁同步电机(Permanent magnet synchronous machine,PMSM)受到了工业和学术界的广泛关注.相对于三相电机,多相电机具有低压大功率输出、高可靠性以及适于容错运行等特性,在航空航天、舰艇舰船、风力发电等领域得到了越来越多的认可[1 ,2 ,3 ] .对于多相电机而言,故障容错运行是一个显著优势.当电机发生缺相故障时,不需要改动任何硬件电路,仅需选择适当的容错控制策略便可降额继续运行,此时避免了停机或系统重组[4 ,5 ,6 ] .针对非正弦反电动势五相PMSM缺相容错运行,国内外学者对降阶解耦模型的磁场定向控制(Field-oriented control,FOC)进行了大量的研究.文献[7 ]通过构建降阶Clark变换矩阵,建立了五相PMSM故障后的解耦模型,其解耦模型将使同步坐标系下的转矩及电压方程与正常状态一致,但磁场中存在的三次谐波会导致转矩脉动.文献[8 ]为抑制故障后产生的转矩脉动,构建同步坐标系下的解耦模型,在速度环采用了滑模控制,但它会使得系统产生抖动,并且控制器的设计较复杂.为此,文献[9 ]采用三次谐波电流注入法来抑制转矩脉动,根据瞬时功率理论和电机反电动势信息,可计算得到故障后的平均转矩和脉动转矩分量,令转矩脉动分量为零,得到基波和三次谐波电流参考值,该方法计算过程复杂,无法在线生成参考电流信号.文献[10 ]给出了单相开路故障后三次谐波电流的注入和在线计算方法,有效地抑制三次谐波磁链引起的转矩脉动,但选用传统PI控制器,其对交流参考电流值的跟踪没有达到最佳效果. ...
Third harmonic current injection in fault-tolerant five-phase permanent-magnet motor drive
3
2018
... 近年来,多相永磁同步电机(Permanent magnet synchronous machine,PMSM)受到了工业和学术界的广泛关注.相对于三相电机,多相电机具有低压大功率输出、高可靠性以及适于容错运行等特性,在航空航天、舰艇舰船、风力发电等领域得到了越来越多的认可[1 ,2 ,3 ] .对于多相电机而言,故障容错运行是一个显著优势.当电机发生缺相故障时,不需要改动任何硬件电路,仅需选择适当的容错控制策略便可降额继续运行,此时避免了停机或系统重组[4 ,5 ,6 ] .针对非正弦反电动势五相PMSM缺相容错运行,国内外学者对降阶解耦模型的磁场定向控制(Field-oriented control,FOC)进行了大量的研究.文献[7 ]通过构建降阶Clark变换矩阵,建立了五相PMSM故障后的解耦模型,其解耦模型将使同步坐标系下的转矩及电压方程与正常状态一致,但磁场中存在的三次谐波会导致转矩脉动.文献[8 ]为抑制故障后产生的转矩脉动,构建同步坐标系下的解耦模型,在速度环采用了滑模控制,但它会使得系统产生抖动,并且控制器的设计较复杂.为此,文献[9 ]采用三次谐波电流注入法来抑制转矩脉动,根据瞬时功率理论和电机反电动势信息,可计算得到故障后的平均转矩和脉动转矩分量,令转矩脉动分量为零,得到基波和三次谐波电流参考值,该方法计算过程复杂,无法在线生成参考电流信号.文献[10 ]给出了单相开路故障后三次谐波电流的注入和在线计算方法,有效地抑制三次谐波磁链引起的转矩脉动,但选用传统PI控制器,其对交流参考电流值的跟踪没有达到最佳效果. ...
... 上述提到的方法只得到了电流的最优参考信号,然而,其对参考信号并没有实现很好的跟踪.对于参考电流信号的跟踪,通常采用的是滞环控 制[11 ] 和PI控制器[12 ] ,滞环控制会带来开关频率不固定以及电流谐波较大的问题,而PI控制器可以完全消除直流信号的稳态误差,但对于交流电流信号却不能精确跟踪.比例谐振(Proportional resonance, PR)控制器[10 ] 可以有效地跟踪交流参考信号,但谐振控制器的带宽窄,只能对单一频率的信号进行补偿. ...
... 文献[10 ]研究了五相PMSM缺一相故障后同步旋转坐标系下交流参考电流信号的生成方法,其生成框图如图2 所示. ...
Global fault-tolerant control technique for multiphase permanent-magnet machines
2
2015
... 上述提到的方法只得到了电流的最优参考信号,然而,其对参考信号并没有实现很好的跟踪.对于参考电流信号的跟踪,通常采用的是滞环控 制[11 ] 和PI控制器[12 ] ,滞环控制会带来开关频率不固定以及电流谐波较大的问题,而PI控制器可以完全消除直流信号的稳态误差,但对于交流电流信号却不能精确跟踪.比例谐振(Proportional resonance, PR)控制器[10 ] 可以有效地跟踪交流参考信号,但谐振控制器的带宽窄,只能对单一频率的信号进行补偿. ...
... 根据文献[11 ],三次谐波电流得到的定子绕组铜耗可用r s (i 2 d3+i 2 q3+i 2 z3)表示,其中r s 为定子电阻,当满足式(14)时,其铜耗达到最小. ...
Observer-based open transistor fault diagnosis and fault-tolerant control of five-phase permanent magnet motor drive for application in electric vehicles
1
2015
... 上述提到的方法只得到了电流的最优参考信号,然而,其对参考信号并没有实现很好的跟踪.对于参考电流信号的跟踪,通常采用的是滞环控 制[11 ] 和PI控制器[12 ] ,滞环控制会带来开关频率不固定以及电流谐波较大的问题,而PI控制器可以完全消除直流信号的稳态误差,但对于交流电流信号却不能精确跟踪.比例谐振(Proportional resonance, PR)控制器[10 ] 可以有效地跟踪交流参考信号,但谐振控制器的带宽窄,只能对单一频率的信号进行补偿. ...
五相永磁同步电动机单相开路故障的容错控制策略
1
2011
... 采用最小铜耗原则电机可以得到最小铜耗,但故障下剩余四相的相电流幅值分布不均匀,如果最大的相电流幅值达到功率器件所能承受的最大值时会限制电机的转矩输出能力.因此,根据文献[13 ],在电机故障下,为提高输出转矩能力,i z1 和i z3 可通过变换矩阵作用到各相电流中,对各相电流进行调节,使得剩余四相电流幅值相等. ...
五相永磁同步电动机单相开路故障的容错控制策略
1
2011
... 采用最小铜耗原则电机可以得到最小铜耗,但故障下剩余四相的相电流幅值分布不均匀,如果最大的相电流幅值达到功率器件所能承受的最大值时会限制电机的转矩输出能力.因此,根据文献[13 ],在电机故障下,为提高输出转矩能力,i z1 和i z3 可通过变换矩阵作用到各相电流中,对各相电流进行调节,使得剩余四相电流幅值相等. ...
Effects of discretization methods on the performance of resonant controllers
1
2010
... 电机缺一相故障后,为了抑制二次和四次转矩脉动,三次谐波电流经过降阶坐标变换生成同步坐标系下电流参考值后,d 轴以及q 轴参考电流信号中包含有二次、四次谐波分量,z 轴参考电流信号中包含有三次谐波分量.对于传统PI控制器而言,它仅可以消除直流信号的稳态误差,但是对产生转矩脉动的谐波分量没有补偿作用,而基于内模原理的比例谐振(PR)控制器可实现对交流信号的无差补偿[14 ] ,其PR控制器传递函数为 ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}