

1 引言
分布式电源(Distributed generation, DG)可以就近实现可再生能源的生产及消费,代表着能源发展的新形态和新方向[1,2,3]。DG具有随机性和间歇性的特点,微电网在一定程度上可以促进DG的并网,从而使DG的利用更为合理有效,提升能源利用 率[4]。微电网可以工作在并网模式或孤岛模式。在孤岛模式下,如何控制并联运行的逆变器实现功率均分成为一个重要问题[5]。目前通常有两种控制方案:一种是在并联运行的逆变器之间利用互联通信线进行信息交换[6,7,8],该控制方案虽然简单,但降低了系统的可靠性和可扩展性。另一种是有功-频率和无功-电压下垂控制,该控制方法无需互联通信线,具有冗余度好、可靠性高以及动态特性好等特点,成为目前研究的重点[9,10,11]。然而,传统下垂控制方法以线路上的电抗远大于电阻为前提,并没有考虑逆变器之间线路阻抗的影响[12]。但是实际线路的阻抗总会存在差异,因此无功功率的均分难以实现。
为此,本文提出了一种基于比例积分(Proportional integral,PI)调节器的改进下垂控制方法,以达到逆变器并联运行时精确分配无功功率的目的。采用传统下垂控制和所提出的改进下垂控制两种控制方法,对两台并联运行的逆变器进行仿真对比分析,通过仿真结果验证所提控制方法的有效性。
2 传统下垂控制的基本原理
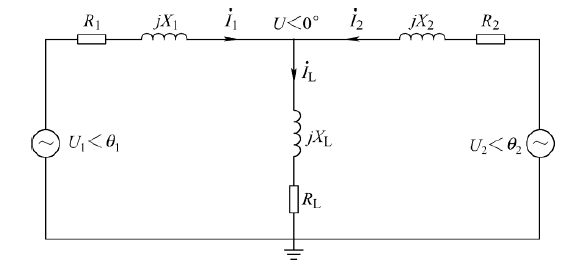
以两台逆变器并联为例,逆变器并联模型如 图1所示,U1∠θ1,U2∠θ2,U∠0°分别为逆变器1、2的输出电压、负载电压,Z1=R1+jX1,Z2=R2+jX2分别是逆变器1、2的线路阻抗,R1,R2,X1,X2分别为逆变器1、2的线路电阻和电抗,${{\dot{I}}_{1}}$,${{\dot{I}}_{2}}$分别为逆变器1、2注入公共母线的电流。
图1
此时逆变器i(i=1, 2)输出的有功功率和无功功率可以表示为
若线路阻抗为感性,此时不用考虑线路电阻的影响,由于逆变器输出电压与负载电压之间的相角差θi通常很小,则sinθi≈θi,cosθi≈1,式(1)可以化简成
式中,ω和U分别是逆变器输出的角频率和输出电压的幅值,ω0和U0则为空载下逆变器输出电压的角频率和幅值,Pref和Qref分别为有功功率和无功功率的设定值,P和Q分别为逆变器实际输出的有功功率和无功功率,m和n分别为逆变器的有功-频率下垂系数、无功-电压下垂系数。
由式(4)可以得到有功-频率下垂系数m和无功-电压下垂系数n
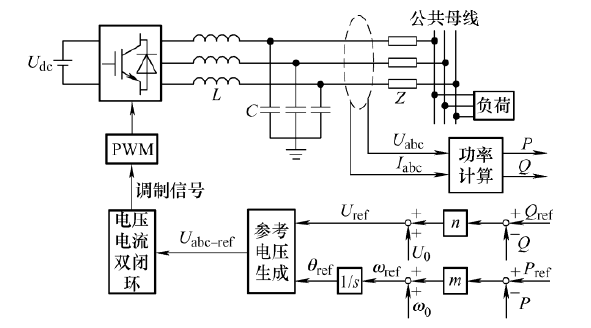
式中,Pmax、Qmax分别为逆变器输出的最大有功功率和无功功率,fmax、fmin分别为逆变器输出的最大和最小频率,Umax、Umin分别为逆变器输出的最大和最小电压。图2为传统下垂控制方法的整体控制原理图,首先测量逆变器输出的电压、电流,然后通过功率计算得到实际的有功功率和无功功率,根据有功-频率控制回路和无功-电压控制回路分别得到输出电压相角的参考值θref和幅值的参考值Uref,生成三相电压的参考值Uabc-ref,采用电压电流双闭环控制生成电压调制信号,调制信号经PWM生成触发脉冲。
图2
3 传统下垂控制的局限性及改进
由式(3)可知,为了使逆变器根据其容量按比例分担负荷[20],下垂系数应当与其容量成反比关系,则
这必须满足
稳定运行时,由于系统频率是全局信号,是有功功率实现精确分配的条件,因此无论线路阻抗如何变化,有功功率都可以实现精确分配,而无功功率与逆变器输出电压幅值相关,要实现无功功率的精确分配,其输出的电压须相等,而输出电压相等要满足逆变器的阻抗与无功功率成反比这一条件,即为了使式(6)成立,必须同时满足式(8)和式(10)
线路阻抗只有在满足这一条件时,无功功率才能实现精确分配。
针对采用传统下垂控制的逆变器并联运行时不能完成无功功率的精确分配这一问题,本文提出了一种改进下垂控制方法。该控制方法的结构框图如图3所示,有功-频率控制回路采用传统的有功-频率下垂控制,无功-电压控制回路在传统下垂控制的基础上采用两个PI调节器进行修正。该方法利用逆变器输出的无功功率和所测量的电压,生成参考电压幅值Uref的指令值。
图3
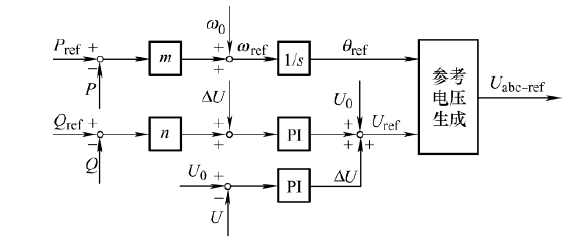
其中,Qref与Q作差,与无功-电压下垂系数相乘,再与ΔU相加送入PI调节器,PI调节器的作用是为了保证U1=U2,即保证X1/n1=X2/n2;U0与U作差后送入PI调节器,是为了使公共母线电压保持恒定,而后一PI调节器的输出作为前一调节器的输入是为了保证n1Q1=n2Q2。
4 仿真分析
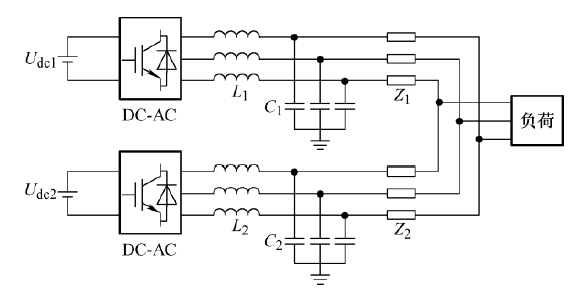
本文采用两台并联运行的逆变器进行仿真分析,为了简化分析将直流母线电压用直流电压源代替,利用Matlab/Simulink搭建了两台逆变器并联控制系统的模型如图4所示。在两种控制方法中,两台逆变器的有功-频率控制回路始终采用传统下垂控制中的有功-频率下垂控制,而无功-电压控制回路分别采用传统下垂控制中的无功-电压下垂控制和文中所提出的基于PI调节器的改进下垂控制。系统的额定电压为380 V,直流母线电压为800 V,滤波电感为L1=L2=8 mH,滤波电容为C1=C2=100 μF,系统额定频率为50 Hz。
图4
为比较两种控制方法的功率分配情况,以下仿真考虑了两台逆变器容量、线路阻抗的不同工况。对两台并联运行的逆变器的不同工况进行分析,详细的分析内容如下。
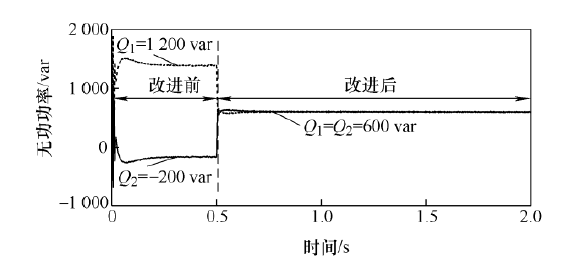
设计两台并联运行的逆变器的额定容量之比为1:1,具体的仿真参数如下。有功功率参考值Pref1= Pref2=2 kW,无功功率参考值Qref1=Qref2=600 var,有功-频率下垂系数m1=m2=5×10-5 rad/(s·W),无功-电压下垂系数n1=n2=4×10-4 V/var,线路电阻R1=0 Ω,R2=0.2 Ω,线路电抗X1=0 Ω,X2=0.628 Ω。在t=0.5 s之前,采用传统下垂控制方法,在t=0.5 s之后,采用改进下垂控制方法,仿真结果如图5~8所示。图5和图6分别为两台逆变器容量和线路阻抗均相同时输出的有功功率和无功功率。图7和 图8分别为两台逆变器容量相同、线路阻抗不同时输出的有功功率和无功功率。仿真结果表明,如果两台逆变器的容量相同,无论线路阻抗是否相同,两台逆变器输出的有功功率在改进前后都能够实现均分。采用传统下垂控制时,由于线路阻抗不同,两台逆变器输出的无功功率不能实现均分,采用改进下垂控制时,两台逆变器输出的无功功率能够实现均分。
图5
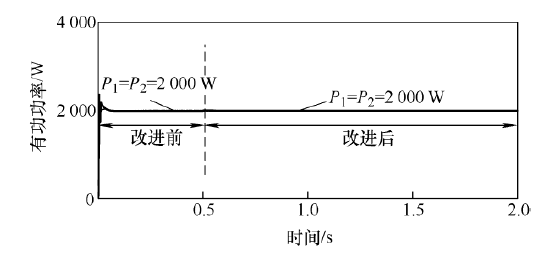
图6
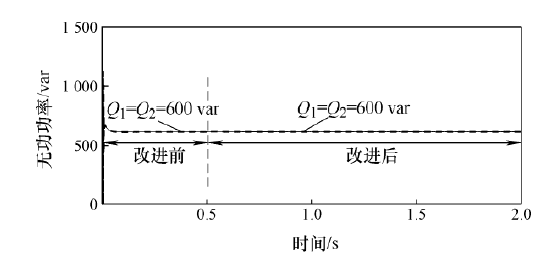
图7

图8
设计两台并联运行的逆变器的额定容量之比为2:1,具体的仿真参数如下。有功功率参考值Pref1= 4 kW,Pref2=2 kW,无功功率参考值Qref1=1.2 kvar,Qref2=600 var,有功-频率下垂系数m1=2.5×10-5 rad/(s·W),m2=5×10-5 rad/(s·W),无功-电压下垂系数n1=2×10-4 V/var,n2=4×10-4 V/var,线路电阻R1=0 Ω,R2=0.2 Ω,线路电抗X1=0 Ω,X2=0.628 Ω。在t=0.5 s之前,采用传统下垂控制方法,在t=0.5 s之后,采用改进下垂控制方法,仿真结果如图9~12所示。图9和图10分别为两台逆变器容量不同、线路阻抗相同时输出的有功功率和无功功率。图11和图12分别为两台逆变器容量不同、线路阻抗不同时输出的有功功率和无功功率。由仿真结果可知,如果两台逆变器的容量不同,无论线路阻抗是否相同,两台逆变器输出的有功功率在改进前后都能够根据各逆变器的容量按比例精确分配。由于线路阻抗不同,采用传统下垂控制时,两台逆变器输出的无功功率不能根据各逆变器的容量按比例精确分配,采用改进下垂控制时,两台逆变器输出的无功功率可以根据各逆变器的容量实现精确分配。
图9

图10

图11

图12

图13

图14

图15

图16

图17

图18

图19

图20

5 结论
本文围绕逆变器并联控制系统的功率分配问题进行了讨论。分析了传统下垂控制方法的基本原理,针对该控制方法的不足,提出了一种基于PI调节器的改进下垂控制方法。搭建了两台逆变器并联运行的仿真模型,对两种控制方法进行了对比分析。由仿真结果可知,无论两台逆变器的容量、输电线路的阻抗是否相同,采用改进下垂控制时,逆变器输出的有功功率和无功功率都能够实现精确分配,验证了所提控制方法的有效性。
参考文献
区域配电网内分布式电源和负载联盟交易模式设计和分析
[J].
Coalition trading mode design and analysis for distributed generators and loads in regional distribution network
[J].
考虑网架结构和分布式电源的主动配电系统双层规划
[J].
Bi-level programming of active distribution system considering grid structure and distributed generation
[J].
交直流混合配电网电能质量综合检测和补偿方法
[J].
Power quality detection and compensation method of AC/DC hybrid distribution network
[J].
微电网逆变器下垂控制技术研究
[J].
Technical research on the droop control of micro-grid inverter
[J].
A simple control technique for distributed generations in grid-connected and islanded modes
[C]//
A precoding OFDM MIMO radar coexisting with a communication system
[J].DOI:10.1109/TAES.7 URL [本文引用: 1]
Modeling of medium-voltage power-line communication systems noise levels
[J].
Detection and location of high impedance faults in multi-conductor overhead distribution lines using power line communication devices
[J].DOI:10.1109/TSG.2014.2365855 URL [本文引用: 1]
交直流配电网逆变器并联控制技术研究现状分析
[J].
Analysis on research status of parallel inverters control technologies for AC/DC distribution network
[J].
下垂控制微电网的无功补偿失稳机理及抑制对策
[J].
Instability mechanism and control measures of reactive compensation in islanded micro-grid based on droop control
[J].
基于旋转坐标变换的孤岛微网群广义下垂控制策略
[J].
Generalized sag control strategy for isolated island microgrid clusters based on rotation coordinate transformation
[J].
带有虚拟阻抗的逆变器并联改进型下垂控制
[J].
An improved droop control strategy based on virtual impedance in inverter parallel system
[J].
基于虚拟电阻的微电网孤岛运行控制策略
[J].
Control strategy for island micro-grid based on virtual resistance
[J].
A novel control strategy for parallel-connected converters in low voltage micro-grid
[C]//
VSC-MTDC系统变截距直流电压下垂控制策略
[J].
Variable intercept DC-voltage droop control for VSC-MTDC system
[J].
A decoupled and adaptive power sharing strategy based on droop method for parallel inverters
[C]//
微网改进下垂控制策略研究
[J].
Research on improved droop control strategy for micro-grid
[J].
基于虚拟阻抗的变阻感比低压微电网功率控制策略研究
[J].
DOI:10.11985/2018.05.003
URL
[本文引用: 1]

低压微电网中传统下垂控制存在耦合,且由于线路阻抗不匹配使逆变器难以精确控制输出功率,容易引起逆变器间环流。本文分析了逆变器输出功率特性,通过引入虚拟功率得出线路阻感比与下垂控制的耦合关系,提出了基于虚拟阻抗的功率解耦控制策略。策略通过增加虚拟阻抗控制环,改变逆变器输出等效阻感比,实现功率控制的解耦,同时解决了逆变器在正常运行及负载变化时功率不能均分的问题。利用Matlab/Simulink搭建了低压微电网基本结构的仿真模型,并与传统下垂控制对比,验证了本策略的有效性。
Power decoupling control strategy of variable impedance ratio based on virtual impedance for micro-grid
[J].
同步控制逆变电源并网预同步过程分析
[J].
Analysis of grid-connecting pre-synchronized process for synchronously controlled inverter power source
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}