

1 引言
工业的飞速增长进一步造成气候恶劣变化,大气中污秽混合物严重威胁着高压输电线路的绝缘子安全稳定运行[1,2]。污闪跳闸一直是影响电力系统安全输电的问题之一[3],绝缘子在其中通常起着重要作用,它的质量好坏影响到整个系统的可靠运行[4,5]。一旦发生污闪事故,则波及面大、持续时间长[6],并且经济损失十分巨大[7],严重情况下,会发生电力人身安全事故[8]。污闪跳闸已经成为影响电力系统安全经济稳定运行的主要因素之一[9]。随着科技的发展,高压绝缘子清扫装置研制智能化的程度越来越高,国内外涌现出了大量的研究成果[10]。自20世纪70年代起,法国电力公司(Electricite De France,EDF)对63~400 kV输电网络的机器人维护可行性进行了研究[11];日本工程师Nakashima等[12]针对自动机器人技术在线路维修工作中的应用进行了研究,根据绝缘子的形状和尺寸的大小,在绝缘子周围安装管道和喷孔,通过对水进行加压流入管道和喷孔实现对绝缘子的水冲洗。Murali等[13]利用神经网络的高模型复杂性和增强学习(Reinforcement learning,RL)算法的无模型性为许多机器人应用程序提供了一个理想的组合,对机器人操作提供了便利。文献[14]对机器人轨迹规划的动态规划方法进行了研究。德国某公司[15]设计出了一款灵活性较好的高压水冲洗装置,能够实现在线路停电的条件下对绝缘子进行冲洗。文献[16]采用绝缘子带电清扫机器人清扫绝缘子,可以有效地清除绝缘子表面的污秽,防止污闪事故的发生。文献[17]针对500 kV超高压交流输电线路悬垂绝缘子串的环境特点和双伞裙瓷质盘形悬式绝缘子带电清扫任务需求,提出了一种新型悬垂绝缘子带电清扫机器人机构。文献[18]介绍一种便携式室外专用绝缘子串灰尘清扫器,该清扫器能够根据被擦洗设备形状快速完成擦洗任务,自由快速切换近距擦洗和远距擦洗两种模式而无需改变操作人员所在位置,擦洗角度任意可调,而且能够在停电状态下水洗擦掉顽固污渍,有效解决了高压设备绝缘子清扫问题。现阶段,“爬、扫、涂”的方式被广泛地运用在我国电力设备外绝缘维护中[19]。为解决我国电力设备外绝缘维护“爬、扫、涂”方式的缺点,本文对变电站支柱式绝缘子清扫系统进行了设计与研究。
2 绝缘子清扫系统设计
2.1 绝缘子清扫系统的组成
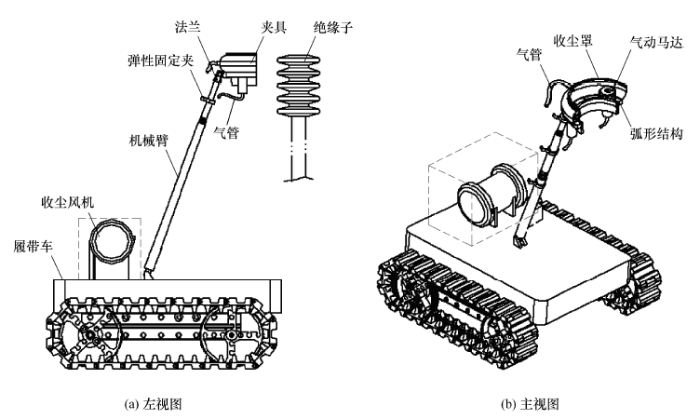
图1
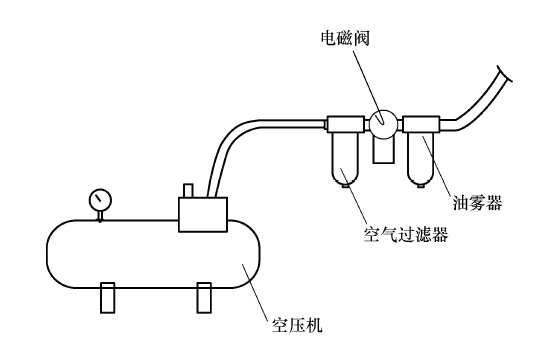
空压风系统如图2所示,包括空压机、空气过滤器、电磁阀和油雾器。空气过滤器的作用是对空压机输送的空压风进行干燥处理;电磁阀的作用是调节空压风的气压从而实现对气动马达转速的调节;油雾器作用是对空压风进行润滑处理保证气动马达的快速转动。
图2
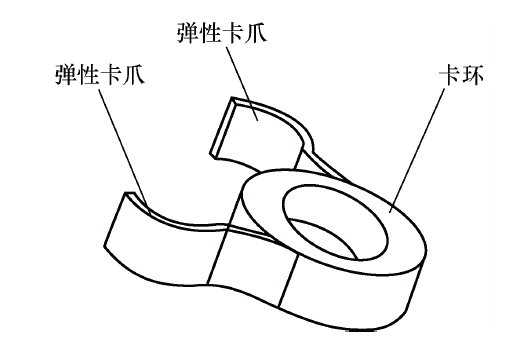
移动操作系统包括移动底座、机械臂和弹性固定卡。如图3所示,弹性固定卡的作用是固定气管。
图3
清扫系统包括收尘管路、收尘罩、带通孔弧形结构、气动马达、通气管路、弹性垫块和防静电毛刷。
2.2 绝缘子清扫系统工作原理
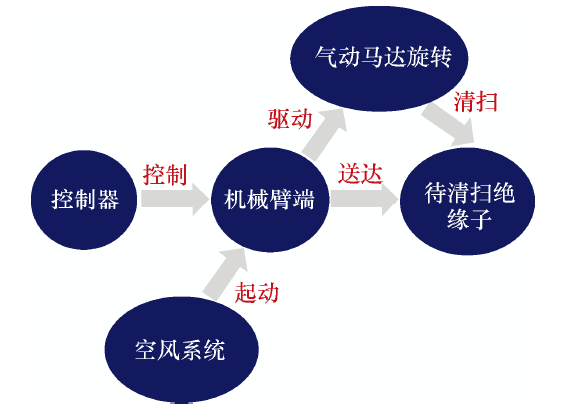
绝缘子清扫系统的工作原理如图4所示,当控制器将机械臂末端的防静电清扫刷头送达至待清扫的绝缘子,起动空风系统驱动气动马达的旋转,防静电清扫刷头和气动马达同轴旋转,从而实现对绝缘子的清扫。通过起动收尘风机将清扫过程中的灰尘收集到收尘室,防止清扫过程中产生的灰尘对绝缘子造成二次污染。
图4
3 绝缘子清扫系统仿真分析
对绝缘子清扫系统模型进行运动学及力学仿真分析,首先使用Matlab仿真软件对机械臂的运动轨迹进行仿真,判断其和实际工作轨迹逆解的完成是否满足条件。接着依据绝缘子清扫系统的设计指标要求,对连接小车与机械臂之间的圆形安装底座在ANSYS和Hypermesh软件下建模仿真,判断所受到的应力是否达到相关技术指标,避免绝缘子清扫机械臂在工作的过程中,因设计未达到要求而发生小车主体结构的损坏,引发事故。
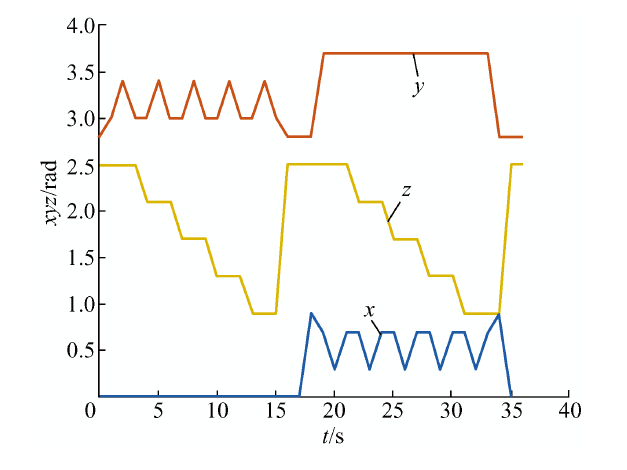
3.1 实际工作轨迹求逆解
图5
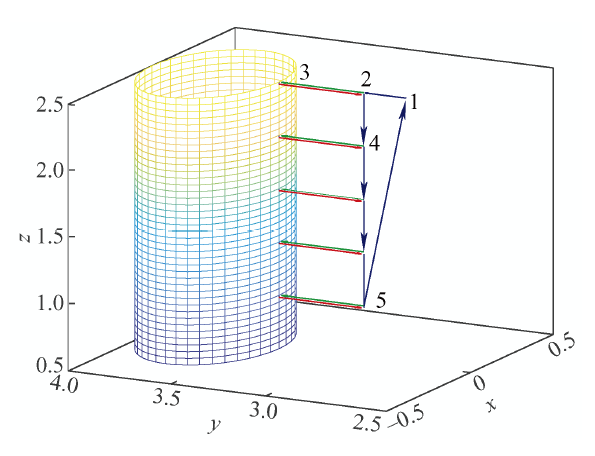
图6
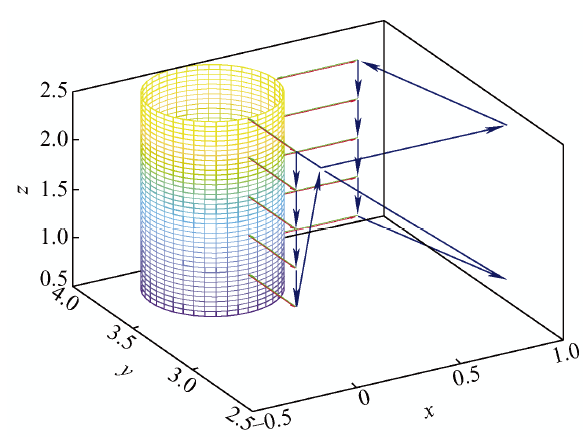
图7
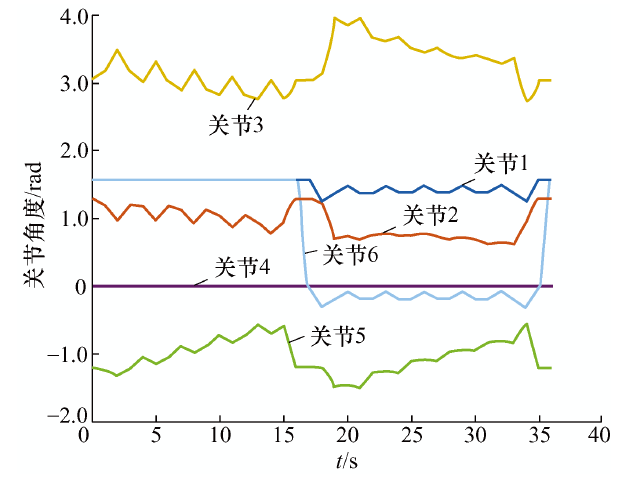
使用Matlab编写代码求得机械臂逆解与机械臂工具箱自带逆解算法进行逆解得到了相同的逆解结果,逆解结果(六个关节的角度值)如图8所示,单位为弧度,证明了编写代码进行求逆解的正确性,可以进行工业生产。
图8
3.2 绝缘子清扫系统的应力分析
依据绝缘子清扫系统的设计指标要求,在ANSYS和Hypermesh软件下对连接小车与机械臂之间的圆形安装底座建模仿真,判断所受到的应力是否达到相关技术指标,避免绝缘子清扫机械臂在工作的过程中,因设计未达到要求而发生小车主体结构的损坏而引发事故。
绝缘子清扫机械臂的底部支架采用材质为直径/厚度小于16 mm的Q235的结构钢,这种材质屈服极限为235 MPa,即承受的最大应力为235 MPa,因此要求整个机械臂对底部支架的最大应力不超过235 MPa,才符合技术指标。
机械臂工作过程中会对安装底座产生特定方向的力和力矩,通过对安装底座进行应力分析,判断所受到的应力是否达到相关技术指标。图9为机械臂所产生的力和力矩以及方向。
图9
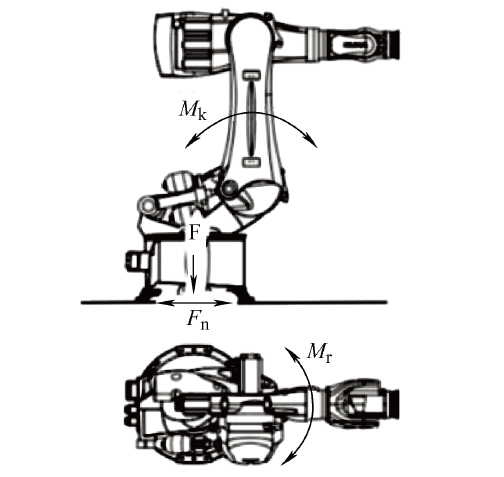
表1 机械臂作用在底部支架上的载荷
| 力和力矩 | 数值 |
|---|---|
| 正常情况下Fv/N | 37 000 |
| 最大情况下Fvmax/N | 40 500 |
| 正常情况下Fh/N | 15 900 |
| 最大情况下Fhmax/N | 23 500 |
| 正常情况下Mk/(N·m) | 58 900 |
| 最大情况下Mkmax/(N·m) | 84 500 |
| 正常情况下Mr/(N·m) | 18 500 |
| 最大情况下Mrmax/(N·m) | 45 500 |
图10
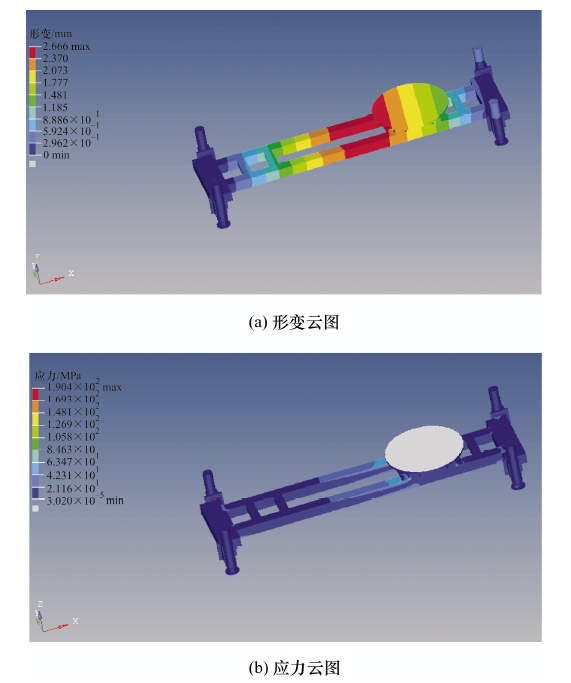
图11
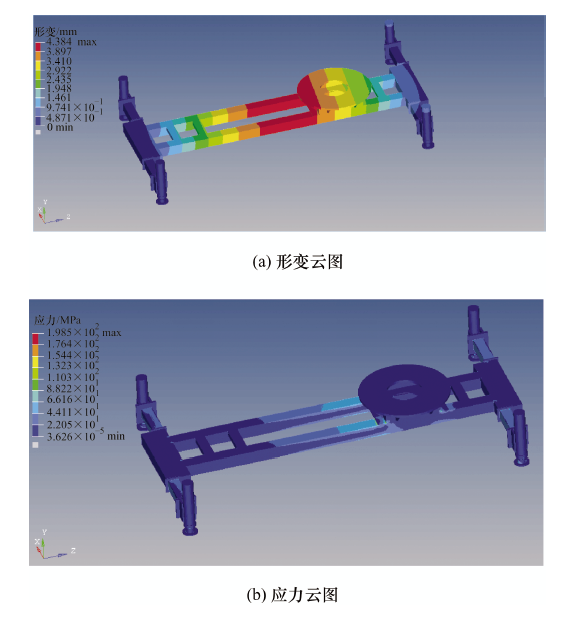
仿真结果数据显示,机械臂的底部支架液压腿在不伸长和伸至最长的状态下,底部支架受到的最大应力均在支架承受范围内,符合技术指标,满足设计要求,本文中夹具所承受的重量小于300 kg。所以满足此款底座设计要求,可以实现多方面的用途。
4 绝缘子清扫机械臂的软硬件与控制
4.1 工业机械臂编程与仿真工具
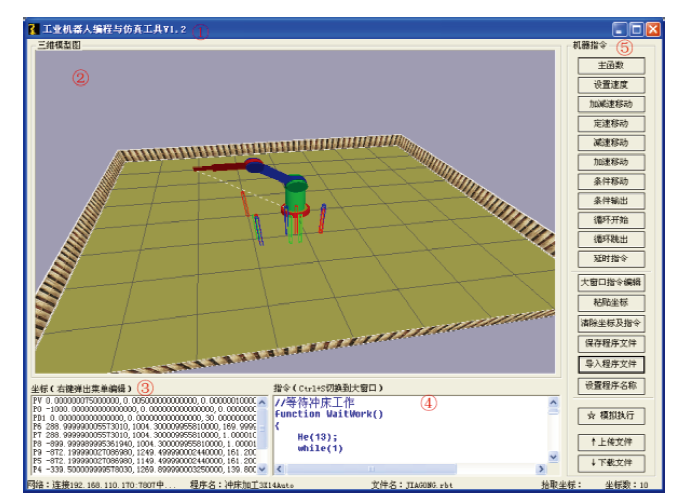
“工业机械臂编程与仿真工具”是用来编写机械臂具体动作的程序,可以实现坐标点获取、机器指令编程、程序文件上传和下载,各种加工程序上传到控制服务器后实现机械臂的指令编程。同时,该软件还可以虚拟仿真运行所编写的程序动作。在计算机上安装好该程序,编程与仿真工具初主面如图12所示。在这个界面中可以看到有五个区域组成。① 程序名称及版本号;② 机械臂位置关系及坐标点显示,机械臂动作虚拟运行;③ 坐标接收及坐标点定义;④ 指令编程区;⑤ 机器指令控制按钮。区域②是3D虚拟仿真画面区。单独取一个控制器通电后放在计算机旁边,用网线将计算机和控制器连接后,将编写动作程序下载到控制器,即可虚拟运行该程序。该运行方式突破了常规调试方法的弊端,因为在初次编写动作程序时,很可能出现动作不合理(比如伸太高或太远会撞到周围的东西或者写错程序导致机械臂运动到未知位置进而伤到人),在虚拟3D动画中可以及时发现程序的错误,不会造成事故的发生。区域③左下角的区域是一个定义坐标点的窗口,相当于一个变量的赋值声明,例如P0点指的就是机械臂的原始位置点,也叫原点。后面的6个数据代表的是机械臂腕部法兰盘中心(PCT点)点坐标系在机械臂坐标系下的位置X、Y、Z与姿态a3、a4、a5。在示教时可以在任何一点停下保存该点并命名,保存的点就会在这个窗口出现。在编程时可以直接调用该点,比如执行LineMove(P0),无论机械臂在哪个位置,都会直线运动到P0点。区域⑤是快捷按钮区,包括上传下载、模拟执行。
图12
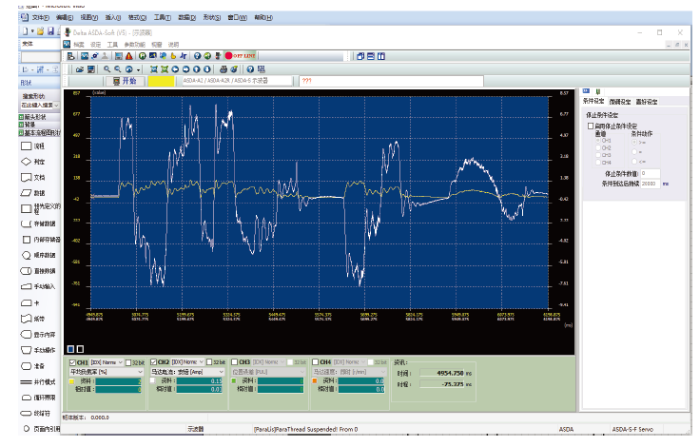
4.2 波形测试
图13
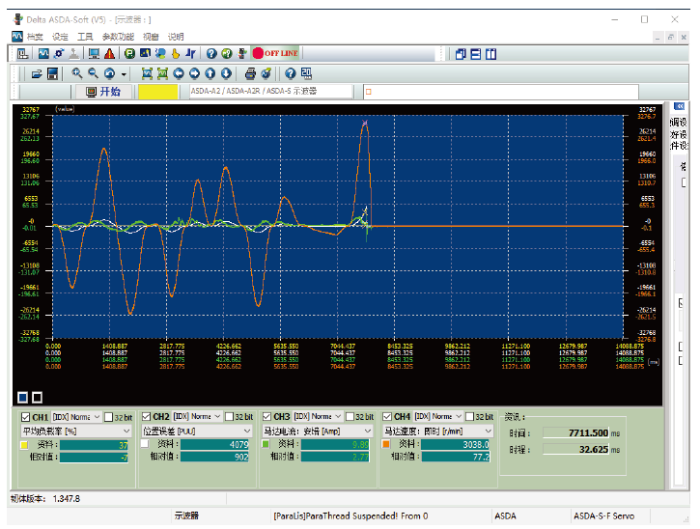
正常运行某动作局部放大图如图14所示,波动的曲线为电流,较为平缓的曲线是平均负载。可看到抛开电流反方向为负数的情况(可以把电流值取绝对值),电流和平均负载的趋势完全一样,负载最大的时候,电流也最大,电流最小的时候,负载也最小,电流为零时,负载也为零,不难看出两者之间是一个正比例关系。这就印证了伺服器会估算负载大小,并随时调整转矩去匹配负载。调整扭矩的方法就是实时改变电流大小。因为电流和转矩基本成正比,所以可以看到电流和负载也成比例。
图14
5 结论
(1) 使用Matlab编写代码求得机械臂的逆解与机械臂工具箱带的逆解算法进行逆解得到了相同的逆解结果(六个关节的角度值)。证明了编写代码进行求逆解的正确性,可以进行工业生产。
(2) 应力分析仿真结果数据显示机械臂的底部支架液压腿在不伸长和伸最长的状态下,底部支架受到的最大应力均在支架承受范围内,符合技术指标,满足设计要求。
(3) 通过“工业机械臂编程与仿真工具”在虚拟3D动画中实现了机械臂的模型操作,可以及时发现程序的问题,避免事故的发生。
(4) 通过波形测试,可以得出伺服器会估算负载大小,并随时调整转矩去匹配负载。通过实时改变电流大小,来实现调整扭矩。因为电流和扭矩基本成正比关系,所以可以看到电流和负载也成比例。
参考文献
大气污染对电力网供负荷的影响
[J].
Impact of air pollution on power supply loads
[J].
大气中污秽混合物对输电线路绝缘子的影响
[J].
Influence of contaminated mixture in the atmosphere on insulators of transmission lines
[J].
我国电网防污闪措施的回顾和总结
[J].
Review and summary of anti- pollution flashover measures in China’s power grid
[J].
盐密对污秽复合绝缘子电场与温度场的影响研究
[J].
Study on the effect of salt density on electric and temperature field of contaminated composite insulator
[J].
有限元分析在接触网绝缘子电场分析中的应用
[J].
Application of finite element analysis in electric field analysis of contact network insulators
[J].
关于输电线路运行管理技术的研究
[J].
Research on operation management technology of transmission line
[J].
输电线路污闪跳闸概率计算方法
[J].
Calculation method for pollution flashover trip probability of trans- mission lines
[J].
解析输电线路污闪跳闸原因及防范
[J].
Analysis on causes and prevention of pollution flashover trips on transmission lines
[J].
影响GIS支柱绝缘子闪络电压的沿面电场特征参数
[J].
Characteristic parameters of creeping electric field affecting the flashover voltage of GIS pillar insulators
[J].
Robotic maintenance of the EDF transmission (63 to 400 kV) network feasibility study and effects on tower design
[C]//
Application of semi-automatic robot technology on hot-line mainte- nance work
[C]//
Analysis of Q-learning on ANNs for robot control using live video feed
[C]//
A dynamic programming approach to trajectory planning of robotic manipulators
[J].
Implementation of control system for insulator cleaning robot
[C]//
Development of automatic cleaning robot for live-line insulators
[C]//
一种悬垂绝缘子带电清扫机器人机构设计
[J].
Design of a robotic cleaning robot with overhang insulators
[J].
便携式绝缘子串软轴带电清扫器及其应用
[J].
Portable shaft cleaner with flexible shaft and its application
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}