1 引言
永磁无刷直流电动机具有功率密度高、输出转矩大、动态响应好、可靠性高、控制简单等优点,广泛应用在航空航天、家用电器和机器人等领域。但是固有缺陷转矩脉动影响了永磁无刷直流电动机的控制精度和伺服性能,同时带来电动机振动和噪声。永磁无刷直流电动机脉动转矩主要包括齿槽转矩和换相转矩[1 ] 。齿槽转矩与电动机本体结构密切相关,通过调整磁钢的宽度、分数槽或定子斜槽、转子错极等方法可以充分抑制齿槽转矩[2 ] 。换相转矩脉动是由于相电感的存在和母线电压为有限值的限制,换相期间电流波形偏离理想激励波形引起的,而且电流波形滞后反电势波形还会引起转矩下降[3 ] 。
目前的三相无刷直流电动机大都采用星形联结,由于三相绕组都连接到中性点,电流换相时,非换相绕组的电流会出现下凹[4 ] 。文献[5 ]指出在5种不同的PWM调制模式,在非导通相里都会出现续流。文献[6 ]指出续流会使电动机产生转矩波动。同时由于相绕组之间存在中性点,当某相绕组或其逆变桥出现故障,会对其他相绕组的运行产生影响,导致电动机不能平稳运行,甚至烧坏绕组,不能满足电动机高可靠性要求[7 ,8 ,9 ] 。
开式绕组将电动机绕组间的中性点断开,电动机本体结构不改变,每相绕组连接各自的驱动电路,其特点为:可对各相绕组的电压、电流单独控制,相绕组间电气隔离;导通相绕组上的两个功率开关器件上承受的电压只有直流母线电压的一半,适合高可靠性、高电压大功率驱动场合[10 ,11 ,12 ,13 ] 。开式绕组结构为永磁无刷直流电动机抑制换相转矩脉动和提高容错性提供了新的思路。
开绕组电动机采用双逆变器控制,两个逆变器可以使用两个隔离的直流母线,也可共用一个[14 ] 。由于隔离直流母线的开绕组电动机系统需要两条电气隔离的直流母线,使系统结构复杂,并且增加了系统的成本,特别是难以用于只有单个电源供电的场合。开绕组电动机采用一个电源时,两个变流器在电动机端部产生的共模电压使得电动机存在零序电流,增加了电动机的损耗和发热,导致系统的效率和稳定运行能力下降。文献[15 ]提出采用SPWM策略直接对三相坐标系中的电压进行调制,消除三相电压中存在的零序电压分量,实现对零序电流的调节从而降低相电流畸变。本文主要研究单电源供电开式绕组无刷直流电动机的换相转矩脉动,提出采用重叠换相相电流闭环控制方法来抑制,利用滑模观测器观测反电势来计算电磁转矩,通过Matlab仿真和试验来验证转矩脉动抑制效果。
2 开式绕组无刷电动机换相过程分析
2.1 开式绕组无刷直流电动机数学模型
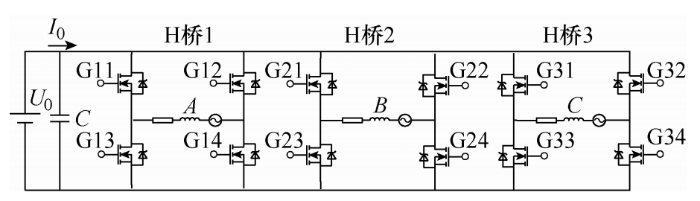
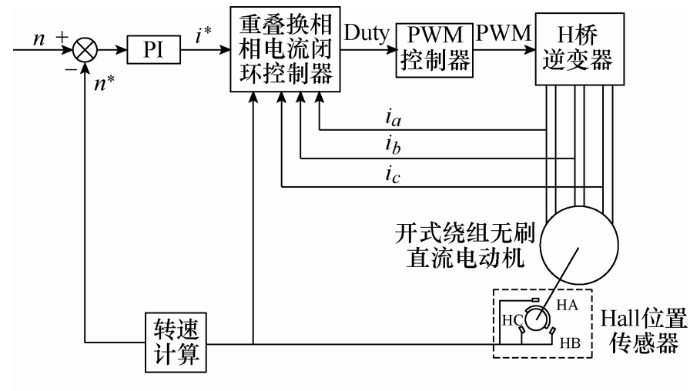
本文研究的开式绕组无刷直流电动机系统采用单个电源供电,三相绕组连接各自的单相H桥逆变驱动电路,如图1 所示。相绕组之间没有公共点,每个单相H桥采用4个开关管,三个H桥连接到同一个直流电源上。图1 中U 0 为开式绕组三相无刷电动机驱动电路电源电压;I 0 为母线电流;Gi 1~Gi 4 (i =1,2,3)为H桥i 的4个开关管。
图1
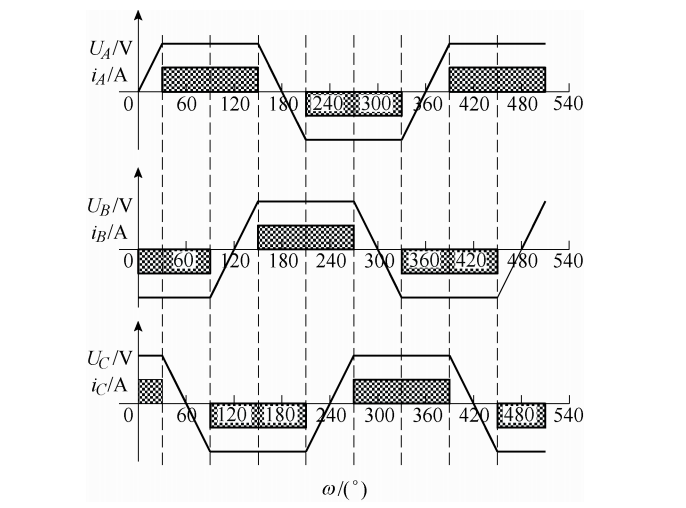
开式绕组无刷直流电动机只是在星形结构电动机的中性点处拆开,每相独立引出,并未改变转子结构,气隙磁场也未改变,所以开式绕组结构电动机的理想反电势波形也为120°梯形波,如图2 所示。为了简化分析和计算,假定开式绕组三相无刷直流电动机的每相绕组电阻相等、自感相等、相与相之间的互感相等。
图2
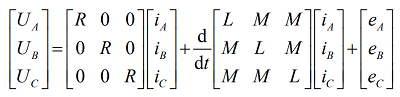
开式绕组无刷直流电动机的三相绕组电压平衡方程可表示为
(1)
式中,UA ,UB ,UC 为定子绕组三相电压;iA ,iB ,iC 为定子绕组三相电流;eA ,eB ,eC 为定子绕组三相反电势;R 为绕组电阻;L 为绕组自感;M 为绕组间互感。
由于转子位置变化不会引起转子磁阻的变化,所以每相绕组自感与互感为常数。但与星形结构不同,电动机没有中性点,所以三相定子电流不再满足之和为0的条件,即
(2)
依据图2 中反电势波形,无刷直流电动机的反电势不仅和电动机转速有关,还与电动机旋转的电角度有关,因此电动机反电势可以表示为函数
(3) $e_{i}=Ef_{i}(θ,ω)$
(4) $E=k_{e}ω$
式中,ke 为反电势系数;ω 为电动机机械角速度;θ 为电动机旋转的电角度。
(5) $T_{e}=(i_{A}e_{A}+i_{B}e_{B}+i_{C}e_{C})/ω$
(6) $T_{e}-T_{L}=J\dot{ω}+Bω$
式中,TL 为负载转矩;J 为电动机转子转动惯量;B 为黏滞摩擦因数。
2.2 绕组互感对换相的影响
开式绕组无刷直流电动机各相绕组之间实现了电气隔离,但是互感的存在使电动机内部电磁并未隔离,一相电流的变化通过互感作用会引起其他相电流的变化。针对此问题依据开式绕组无刷直流电动机的电压平衡方程对互感对相电流的影响作定性分析,将ABC 坐标系下的电压平衡方程(式(1))重写如下
(7)
选取换相前A相正向导通、B相反向导通、C相关断,换相过程A相恒通、B相关断续流、C相反向导通情形进行分析。由于换相过程很短,转子的转动惯量对转速有平滑作用,可以假定换相期间转速不变,反电势E 保持不变。换相前,C相关断电流为0,A、B相的电压方程为
(8) $U_{A}-Mi^{'}_{B}-E=Ri^{'}_{A}+Li^{'}_{A}$
(9) $U_{B}-Mi^{'}_{A}-E=Ri^{'}_{B}+Li^{'}_{B}$
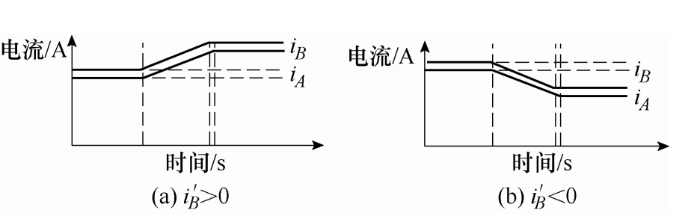
在式(8)和式(9)中,A相正向导通iA > 0,B相反向导通iB <0,分两种情况进行讨论。
(1) B相幅值减小(反向导通),A相电流幅值减小,如图3 a所示。
(2) B相幅值增大,A相电流幅值增大,如图3 b所示。
图3
根据以上分析可以得出:在非换相期间,由于互感的存在一相电流的变化会引起另一相电流的变化,一相电流幅值的增大过程会引起另一相电流幅值增大;相反,一相电流幅值的减小过程会引起另一相电流减小。
在换相期间,C相反向导通电流不再为0,三相电压平衡方程为
(10)
在式(10)中,B相关断电流由负值变为0,即$i^{'}_{B}$>0,C相导通由0变为负值,即$i^{'}_{C}$<0,分三种情况进行讨论。
(1)$|i^{'}_{B}|=|i^{'}_{C}|$,关断相电流幅值下降速率等于导通相电流幅值上升速率,非换相相电流幅值保持不变,如图4 a所示。
(2) $|i^{'}_{B}|>|i^{'}_{C}|$,关断相电流幅值下降速率大于导通相电流幅值上升速率,非换相相电流幅值减小,如图4 b所示。
(3) $|i^{'}_{B}|<|i^{'}_{C}|$,关断相电流幅值下降速率小于导通相电流幅值上升速率,非换相相电流幅值增大,如图4 c所示。
图4
通过上述分析可知,开式绕组无刷直流电动机换相期间换相相电流对非换相相电流的影响与星形联结无刷直流电动机相似。并且,通过式(10)的左边项可以得出互感值M 越大,换相期间换相相电流对非换相相电流的影响越大。
2.3 续流对非换相相电流的影响
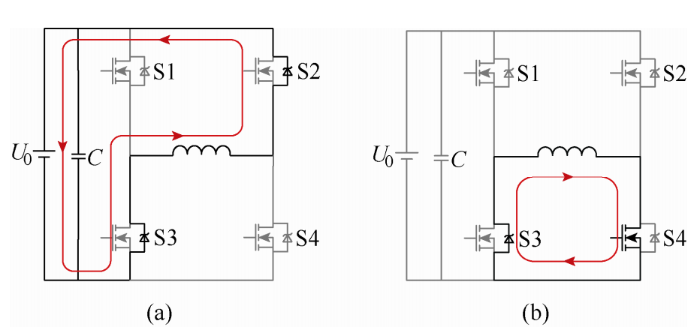
由于电感的存在电流不能突变,所以对应相关断时需要给电流提供续流回路,续流回路通常由功率开关管以及与功率开关管反并联的续流二极管构成。H桥驱动电路的续流回路可以由两个续流二极管或一个续流二极管和一个功率开关管构成,分别如图5 a~5b所示。在图5 a中两个功率开关管S1、S4同时关断,绕组中的电流通过与S2、S3反并联的二极管续流,续流电流向母线电容充电,母线电压被抬高。在图5 b中导通的两个功率开关管中只有S1关断,绕组中的电流通过S4和与S3反并联的二极管续流,续流电流产生电磁转矩以及消耗在回路的电阻上,同时上桥臂的功率开关管和续流二极管也可以形成续流回路。在采用HPWM_LPWM斩波方式或关断相关断过程中会出现图5 a的续流情况,在采用HPWM_LON斩波方式时会出现图5 b的续流情况。当绕组中电流方向相反时有与上述两种情况类似的续流过程。
图5
本文采用同一直流电源给3个H桥逆变器供电的拓扑电路,在未采取换相转矩脉动抑制的情况下,换相过程关断相续流为如图5 a的情况,续流过程中母线电压被抬高,在忽略互感作用时非换相电流增大。
3 重叠换相
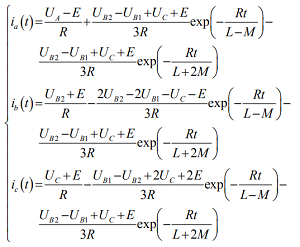
由第2节的分析可知,在换相期间对各相绕组电流进行控制,在换相期间保证关断相电流幅值下降速率和导通相电流幅值上升速率相等、非换相相电流保持不变,三相电流绝对值之和保持不变,则换相期间无转矩 脉动。开式绕组无刷直流电动机的各相绕组相互独立,反电势是不易控制量,所以换相转矩脉动的抑制可以从电流角度入手,以A相正向恒通、B相关断续流、C相反向导通为例,对换相期间电流的瞬态变化进行分析。假定换相期间转速不变,反电势E 保持恒定。三相绕组的电流瞬时值如式(11)所示
(11)
令a1 =exp(-Rt/(L-M)) ,a2 =exp(-Rt/(L+2M)) ,式(11)可写为矩阵形式
(12)
再令
(13)
(14)
(15) $T_{eCom}=E(|i_{a}|+|i_{b}|+|i_{c}|)/ω$
只要满足在换相期间保证三相电流绝对值之和为定值,则换相期间无转矩脉动。以三相电流绝对值之和为目标函数,目标函数可表示为
(16) $i_{sum}(t)=|i_{a}|+|i_{b}|+|i_{c}|=c_{1}+\frac{c_{2}}{3}\lgroup exp\lgroup-\frac{Rt}{L-M}\rgroup+exp\lgroup-\frac{Rt}{L+2M}\rgroup\rgroup$
式中,c1 =UA -UB -UC -3E,c2 =UA +UB +UC +E。
寻求UB 满足的条件使目标函数在换相期间为定值。对式(16)求导,可得
(17) $i^{'}_{sum}(t)=\frac{c_{2}}{3}\lgroup-\frac{Rt}{L-M}exp\lgroup-\frac{Rt}{L-M}\rgroup-\frac{Rt}{L+2M}exp\lgroup-\frac{Rt}{L+2M}\rgroup\rgroup$
若要保证换相期间$i_{sum}(t)$为定值,则$i^{'}_{sum}(t)$恒等于0,即式(17)恒等于0,此时只能有c 2 =0才能满足条件,所以有
(18) $U_{B}=-(U_{A}+U_{C}-E_{B})$
在换相期间为使换相过程尽快完成,期望C相电流幅值有较快的上升速率,所以换相期间可使C相电压等于母线电压$U_{0}$,此时可得B相电流方程为
(19) $i_{b}(t)=\frac{U_{0}-U_{A}}{R}+\frac{E-U_{0}}{R}exp\lgroup-\frac{Rt}{L-M}\rgroup$
(20) $t_{com}=-\frac{L-M}{R}ln\lgroup\frac{U_{0}-U_{A}}{U_{0}-E}\rgroup$
在导通相施加激励电压为母线电压时,并令$\tau=E_{i}/|E_{i}|$(i =A ,B ,C 为关断相)可得换相期间关断相施加电压和换相结束时间的统一表达式为
(21) $U_{i}=-(U_{j}+\tau U-E_{i})$
(22) $t_{com}=-\frac{L-M}{R}ln\lgroup\frac{\tau U_{0}-U_{j}}{\varsigma U_{0}-E_{i}}\rgroup$
每相绕组在通电情形下有三种工作状态,如图6 所示。其中,区间I表示换相期间导通相导通过程,导通相施加电压为母线电压;区间II表示电动机运行过程中该相为非换相相;区间III表示换相过程关断相延迟关断过程,持续时间为tcom 。
图6
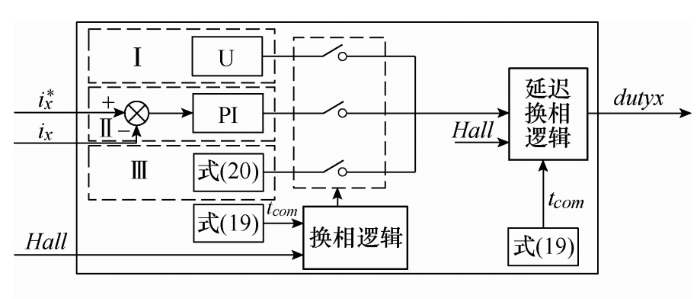
根据上述换相过程瞬态电流分析,采用采用重叠换相和相电流闭环控制相结合的方法对换相期间电流进行控制,如图7 所示。在换相期间,对非换相相电流采用PI调节,以使其电流保持恒定,导通相施加母线电压,关断相延迟关断。施加电压由式(20)计算所得,换相过程持续时间由式(21)计算得到;在非换相期间,对导通的两相绕组电流均采用PI调节,以使电流保持不变。
图7
4 Matlab仿真分析
4.1 开式绕组无刷直流电动机Matlab模型
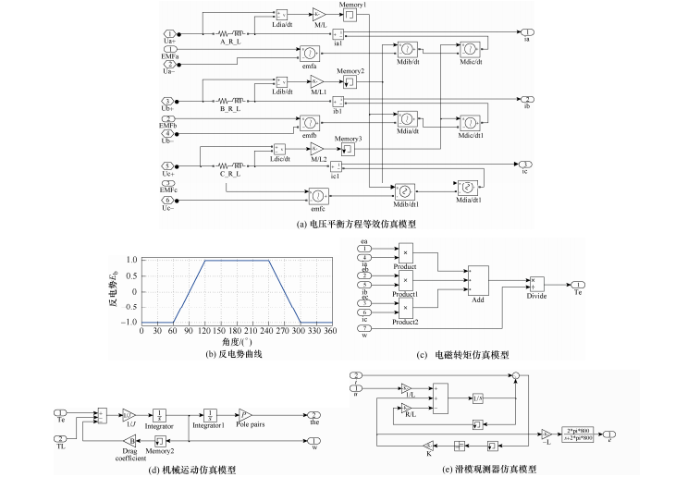
依据电压平衡方程(式(1)),利用Matlab Sim- PowerSystems中的元件,搭建电压平衡方程等效仿真模型如图8 a所示。反电势可以通过归一化反电势与反电势系数、转速的乘积得到,反电势仿真模块根据反电势函数(式(3))和反电势函数参数(表2 ),采用LookUp Table进行建立,所建立的三相反电势归一化曲线如图8 b所示。电磁转矩模块和机械运动模块分别根据式(5)和(6)搭建,所建立的模型分别如图8 c和8d所示。
图8
对转矩信息的获取可采用直接测量和间接观测两种方法。直接测量法通常在电动机轴上级联力矩传感器来对转矩进行测量,力矩传感器的安装增加了系统的成本和复杂程度,同时力矩传感器的带宽有限,限制了电动机在宽调速范围的应用。转矩间接观测法通常采用状态观测器,以电动机的反电势、电流、转速等易测量为状态变量,对电动机的一些状态量进行观测[16 ] 。本文通过滑模观测器对反电势进行观测,通过霍尔位置信息计算电动机转速,传感器采集电流信息,根据式(5)计算得到电磁转矩。滑模观测器原理结构框图如图8 e所示。
本文使用的开式绕组无刷直流电动机参数如表2 所示,电动机带额定负载0.115 N·m起动。
4.2 仿真结果
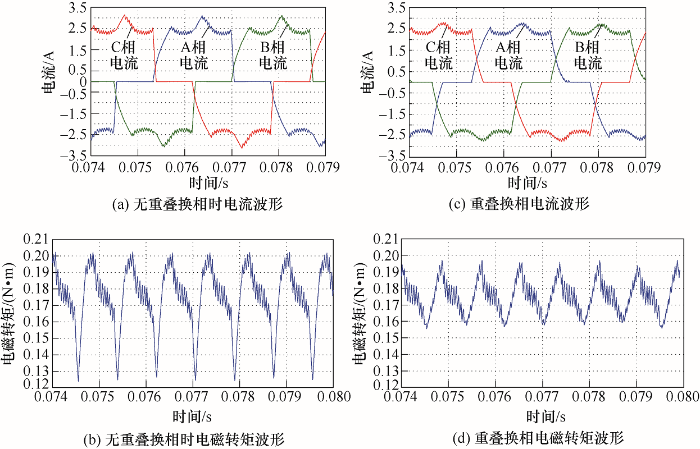
开式绕组无刷直流电动机在不采用换相转矩脉动抑制条件下,速度环PI参数分别为K p = 0.3、Ki =0.05;电流环的PI参数为K p =5、Ki =4;PWM斩波方式为HPWM_LON,斩波频率20 kHz,给定转速2 500 r/min,电动机加额定负载起动,电动机运行稳定时的电流和转矩仿真波形如图9 a~9b所示。开式绕组无刷直流电动机采用重叠换相相电流闭环控制,转速电流双闭环PI参数同上,电动机运行稳定时的电流和转矩仿真波形如图9 c~9d所示。
图9
由仿真波形可知,在换相期间没有采用重叠换相,关断相电流幅值的下降速率明显高于导通相电流幅值的上升速率,导致换相期间出现很大的转矩脉动;通过重叠换相后关断相电流幅值下降速率明显减缓,补偿了换相期间转矩的损失,从而有效地抑制了换相转矩脉动。
5 试验分析
5.1 开式绕组无刷电动机控制器
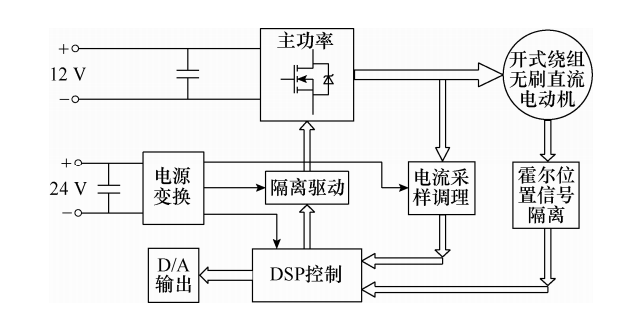
图10 所示为开式绕组无刷直流电动机控制器的硬件结构图,主要由六部分组成:DSP控制单元、隔离驱动单元、霍尔位置信号隔离单元、主功率单元、电流采样调理单元和电源变换单元。
图10
基于DSP的控制单元是控制器的核心部分,DSP通过捕获(CAP)模块获取霍尔信号,经过逻辑综合得到换相控制信号,使用内部的ADC模块采集电流信号,通过控制算法计算得到PWM占空比,采用芯片的事件管理器模块将PWM信号输出给隔离驱动单元。为了尽可能减小主功率部分对控制部分的干扰,控制单元与驱动单元之间采用光耦隔离,电动机的霍尔位置信号也通过光耦隔离之后送入控制单元,对电动机相电流的采集采用霍尔电流传感器。电源变换单元主要为控制单元、驱动隔离单元和电流采样调理单元等提供电能。D/A输出单元将电动机控制过程中的一些状态量,如反电势、电磁转矩等以电压的形式输出,便于对电动机控制过程中的状态变化进行监测。
5.2 试验平台
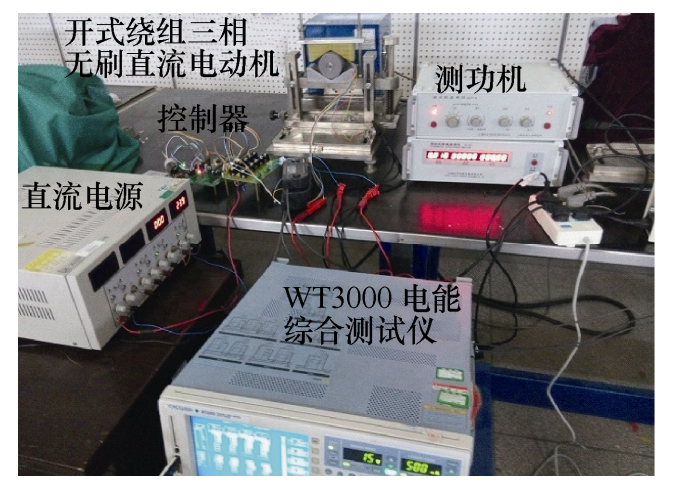
开式无刷直流电动机试验台如图11 所示,直流电源给控制器供电,控制器的三个H桥逆变电路连接开始绕组无刷电动机的三相绕组,测功机给电动机加额定负载,WT3000电能综合测试仪测量电动机三相绕组的相电压和电流数据,采用硬件电路对反电势、电流以及转速进行采集,计算得到电磁转矩,通过示波器进行测量[17 ] 。
图11
5.3 重叠换相试验
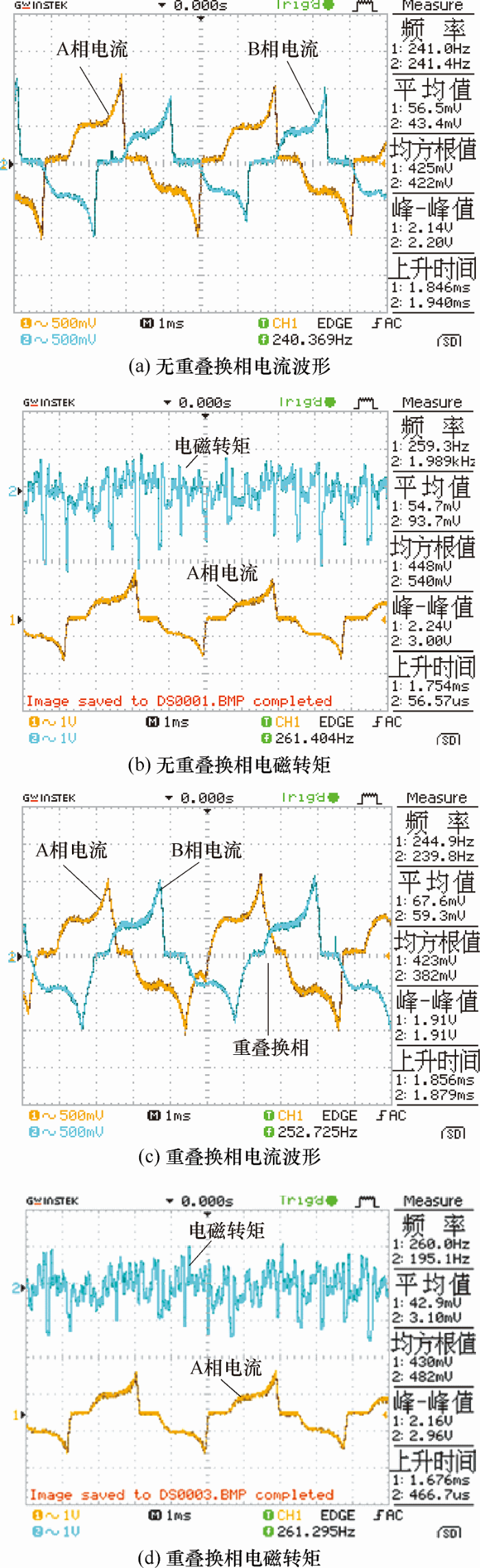
开式绕组无刷直流电动机不采用重叠换相控制,在额定负载、转速n =2 500 r/min条件下,得到电磁转矩、电流波形如图12 a~12b所示,每360°(1个电流周期)内,电磁转矩出现6次较大脉动,分别对应6个不同换相时刻。在图12 a中,换相过程关断相电流幅值下降速率高于导通相电流幅值上升速率,从而造成换相期间较大的转矩脉动,同时由于反电势并非理想波形,且霍尔传感器安装位置出现略微偏差造成换相延时,导致电流在关断前出现较大上翘。
图12
开式绕组无刷直流电动机采用重叠换相相电流闭环控制,在额定负载、转速n =2 500 r/min条件下,得到电磁转矩、电流波形如图12 c~12d所示。在图12 c中,采用重叠换相控制,关断相电流幅值的下降速率减缓,在关断相电流为0时,导通相电流也基本达到稳定值;图12 d中电磁转矩与图12 b相比,在换相期间脉动明显减小。
6 结论
开式绕组无刷电动机的相绕组之间不存在中性点,实现了相绕组之间电气隔离,具有一定的容错性能。本文推导开式绕组无刷电动机的电压平衡方程和电磁转矩公式,理论分析得出相绕组间互感值M 越大,换相期间换相绕组相电流对非换相绕组相电流的影响越大;同时相绕组续流过程中母线电压被抬高,这些都会增大电动机的换相转矩脉动。采用重叠换相相电流闭环控制方法对开式绕组无刷电动的相绕组电流机进行控制,推导了重叠换相时间和施加电压的公式,建立了开式绕组无刷电动机的Matlab仿真模型,对样机进行了仿真试验和样机试验,试验结果证明该方法对开式绕组无刷电动机的换相转矩脉动具有明显的抑制作用。
参考文献
View Option
[1]
谭建成 . 永磁无刷直流电机技术
[M]. 北京:机械工业出版社 , 2011 .
[本文引用: 1]
[2]
堵杰 , 孙承波 , 陈国呈 . 无刷直流电动机换相过程中续流对电压和电流的影响
[J]. 电工技术杂志 , 2002 (3 ):5 -8 .
[本文引用: 1]
Du Jie Sun Chengbo Chen Guocheng . Analysis of influence of commutation freewheeling on the voltage and current of BLDCM
[J]. SElectrotechnical Journal , 2002 (3 ):5 -8 .
[本文引用: 1]
[3]
石坚 , 李铁才 . 一种消除无刷直流电动机换相转矩脉动的PWM调制策略
[J]. 中国电机工程学报 , 2012 ,32 (24 ):110 -117 .
[本文引用: 1]
Shi Jian Li Tiecai . A PWM strategy to eliminate commutation torque ripple of brushless DC motors
[J]. Proceedings of the CSEE , 2012 ,32 (24 ):110 -117 .
[本文引用: 1]
[4]
王大方 , 卜德明 , 朱成 , 等 . 一种减小无刷直流电机换相转矩脉动的调制方法
[J]. 电工技术学报 , 2014 ,29 (5 ):160 -166 .
[本文引用: 1]
Wang Dafang Bu Deming Zhu Cheng , et al . A modulation method to decrease commutation torque ripple of brushless DC motors
[J]. Transactions of China Electrotechnical Society , 2014 ,29 (5 ):160 -166 .
[本文引用: 1]
[5]
Chen Wei Liu Yapeng Li Xinmin , et al . A novel method of reducing commutation torque ripple for brushless DC motor based on Cuk converter
[J]. IEEE Transactions on Power Electronics , 2017 ,32 (7 ):5497 -5508 .
[本文引用: 1]
[6]
韦鲲 , 胡长生 , 张仲超 . 一种新的消除无刷直流电动机非导通相续流的PWM调制方式
[J]. 中国电机工程学报 , 2005 ,25 (7 ):104 -108 .
[本文引用: 1]
Wei Kun Hu Changsheng Zhang Zhongchao . A novel PWM scheme to eliminate the diode freewheeling of the inactive phase in BLDC motor
[J]. Proceedings of the CSEE , 2005 ,25 (7 ):104 -108 .
[本文引用: 1]
[7]
郝振洋 , 胡育文 , 黄文新 . 电力作动器中永磁容错电机及其控制系统的发展
[J]. 航空学报 , 2008 ,29 (1 ):149 -158 .
[本文引用: 1]
Hao Zhenyang Hu Yuwen Huang Wenxin . Development of fault-tolerant permanent magnet machine and its control system in electro-mechanical actuator
[J]. Acta Aeronautica ET Astronautica Sinica , 2008 ,29 (1 ):149 -158 .
[本文引用: 1]
[8]
刘国海 , 程燃 , 赵万祥 , 等 . 考虑三次谐波抑制的改进型五相永磁电机直接转矩控制
[J]. 中国电机工程学报 , 2017 ,37 (14 ):4212 -4221 .
[本文引用: 1]
Liu Guohai Cheng Ran Zhao Wanxiang , et al . Improved direct torque control of five-phase permanent magnet motor based on third-harmonic suppression
[J]. Proceedings of the CSEE , 2017 ,37 (14 ):4212 -4221 .
[本文引用: 1]
[9]
林海 , 严卫生 , 李宏 . 无刷直流电动机驱动控制容错方案研究
[J]. 西安交通大学学报 , 2009 ,43 (2 ):53 -57 .
[本文引用: 1]
Lin Hai Yan Weisheng Li Hong . Inverter fault-tolerant operation of brushless DC motor drives
[J]. Journal of Xi’an Jiaotong University , 2009 ,43 (2 ):53 -57 .
[本文引用: 1]
[10]
Kawabata Y Nasu M Nomoto T , et al . High-efficiency and low acoustic noise drive system using open-winding AC motor and two space-vector-modulated inverters
[J]. IEEE Trans. on Industry Electronics , 2002 ,49 (4 ):783 -789 .
[本文引用: 1]
[11]
Huang Qi Luo Ling Xue Likun et al . Research on the characteristics of open winding brushless DC motor
[C]// 22nd International Conference on Electrical Machines and Systems (ICEMS),Harbin , 2019 : 1881 -1886 .
[本文引用: 1]
[12]
Mu-shin Kwak Seung-ki Sul . Flux weakening control of an open winding machine with isolated dualinverters
[C]// 2007 42nd IAS Annual Meeting,New Orleans , 2007 (5 ):251 -255 .
[本文引用: 1]
[13]
Wang Y Panda D Lipo T A , et al . Open-winding power conversion systems fed by half-controlled converters
[J]. IEEE Transactions on Power Electronics , 2013 ,28 (5 ):2427 -2436 .
[本文引用: 1]
[14]
孙丹 , 林斌 , 周文志 . 开绕组电机系统拓扑及控制技术研究综述
[J]. 电工技术学报 , 2017 ,32 (4 ):76 -84 .
[本文引用: 1]
Sun Dan Lin Bin Zhou Wenzhi . An overview of open winding electric machine system topology and control technology
[J]. Transactions of China Electrotechnical Society , 2017 ,32 (4 ):76 -84 .
[本文引用: 1]
[15]
魏佳丹 , 周波 , 韩楚 , 等 . 一种新型绕组开路型永磁电动机起动/发电系统
[J]. 中国电机工程学报 , 2011 ,36 (31 ):86 -95 .
[本文引用: 1]
Wei Jiadan Zhou Bo Han Chu , et al . A novel open winding permanent magnetic starter-generator
[J]. Proceedings of the CSEE , 2011 ,36 (31 ):86 -95 .
[本文引用: 1]
[16]
缪仲翠 , 党建武 , 巨梅 , 等 . 基于分数阶滑模观测的感应电机无速度传感器矢量控制
[J]. 电机与控制学报 , 2018 ,22 (5 ):84 -93 .
[本文引用: 1]
Miao Zhongcui Dang Jianwu Ju Mei , et al . Induction motor sensorless vector control based on fractional order integral sliding mode observer
[J]. Electric Machines and Control , 2018 ,22 (5 ):84 -93 .
[本文引用: 1]
[17]
黄其 , 陈翔 , 罗玲 , 等 . 电动汽车用永磁同步电机控制器设计
[J]. 电机与控制应用 , 2019 ,46 (10 ):84 -91 .
[本文引用: 1]
Huang Qi Chen Xiang Luo Ling , et al . Design of permanent magnet synchronous motor controller for electric vehicle
[J]. Electric Machines & Control Application , 2019 ,46 (10 ):84 -91 .
[本文引用: 1]
永磁无刷直流电机技术
1
2011
... 永磁无刷直流电动机具有功率密度高、输出转矩大、动态响应好、可靠性高、控制简单等优点,广泛应用在航空航天、家用电器和机器人等领域.但是固有缺陷转矩脉动影响了永磁无刷直流电动机的控制精度和伺服性能,同时带来电动机振动和噪声.永磁无刷直流电动机脉动转矩主要包括齿槽转矩和换相转矩[1 ] .齿槽转矩与电动机本体结构密切相关,通过调整磁钢的宽度、分数槽或定子斜槽、转子错极等方法可以充分抑制齿槽转矩[2 ] .换相转矩脉动是由于相电感的存在和母线电压为有限值的限制,换相期间电流波形偏离理想激励波形引起的,而且电流波形滞后反电势波形还会引起转矩下降[3 ] . ...
无刷直流电动机换相过程中续流对电压和电流的影响
1
2002
... 永磁无刷直流电动机具有功率密度高、输出转矩大、动态响应好、可靠性高、控制简单等优点,广泛应用在航空航天、家用电器和机器人等领域.但是固有缺陷转矩脉动影响了永磁无刷直流电动机的控制精度和伺服性能,同时带来电动机振动和噪声.永磁无刷直流电动机脉动转矩主要包括齿槽转矩和换相转矩[1 ] .齿槽转矩与电动机本体结构密切相关,通过调整磁钢的宽度、分数槽或定子斜槽、转子错极等方法可以充分抑制齿槽转矩[2 ] .换相转矩脉动是由于相电感的存在和母线电压为有限值的限制,换相期间电流波形偏离理想激励波形引起的,而且电流波形滞后反电势波形还会引起转矩下降[3 ] . ...
无刷直流电动机换相过程中续流对电压和电流的影响
1
2002
... 永磁无刷直流电动机具有功率密度高、输出转矩大、动态响应好、可靠性高、控制简单等优点,广泛应用在航空航天、家用电器和机器人等领域.但是固有缺陷转矩脉动影响了永磁无刷直流电动机的控制精度和伺服性能,同时带来电动机振动和噪声.永磁无刷直流电动机脉动转矩主要包括齿槽转矩和换相转矩[1 ] .齿槽转矩与电动机本体结构密切相关,通过调整磁钢的宽度、分数槽或定子斜槽、转子错极等方法可以充分抑制齿槽转矩[2 ] .换相转矩脉动是由于相电感的存在和母线电压为有限值的限制,换相期间电流波形偏离理想激励波形引起的,而且电流波形滞后反电势波形还会引起转矩下降[3 ] . ...
一种消除无刷直流电动机换相转矩脉动的PWM调制策略
1
2012
... 永磁无刷直流电动机具有功率密度高、输出转矩大、动态响应好、可靠性高、控制简单等优点,广泛应用在航空航天、家用电器和机器人等领域.但是固有缺陷转矩脉动影响了永磁无刷直流电动机的控制精度和伺服性能,同时带来电动机振动和噪声.永磁无刷直流电动机脉动转矩主要包括齿槽转矩和换相转矩[1 ] .齿槽转矩与电动机本体结构密切相关,通过调整磁钢的宽度、分数槽或定子斜槽、转子错极等方法可以充分抑制齿槽转矩[2 ] .换相转矩脉动是由于相电感的存在和母线电压为有限值的限制,换相期间电流波形偏离理想激励波形引起的,而且电流波形滞后反电势波形还会引起转矩下降[3 ] . ...
一种消除无刷直流电动机换相转矩脉动的PWM调制策略
1
2012
... 永磁无刷直流电动机具有功率密度高、输出转矩大、动态响应好、可靠性高、控制简单等优点,广泛应用在航空航天、家用电器和机器人等领域.但是固有缺陷转矩脉动影响了永磁无刷直流电动机的控制精度和伺服性能,同时带来电动机振动和噪声.永磁无刷直流电动机脉动转矩主要包括齿槽转矩和换相转矩[1 ] .齿槽转矩与电动机本体结构密切相关,通过调整磁钢的宽度、分数槽或定子斜槽、转子错极等方法可以充分抑制齿槽转矩[2 ] .换相转矩脉动是由于相电感的存在和母线电压为有限值的限制,换相期间电流波形偏离理想激励波形引起的,而且电流波形滞后反电势波形还会引起转矩下降[3 ] . ...
一种减小无刷直流电机换相转矩脉动的调制方法
1
2014
... 目前的三相无刷直流电动机大都采用星形联结,由于三相绕组都连接到中性点,电流换相时,非换相绕组的电流会出现下凹[4 ] .文献[5 ]指出在5种不同的PWM调制模式,在非导通相里都会出现续流.文献[6 ]指出续流会使电动机产生转矩波动.同时由于相绕组之间存在中性点,当某相绕组或其逆变桥出现故障,会对其他相绕组的运行产生影响,导致电动机不能平稳运行,甚至烧坏绕组,不能满足电动机高可靠性要求[7 ,8 ,9 ] . ...
一种减小无刷直流电机换相转矩脉动的调制方法
1
2014
... 目前的三相无刷直流电动机大都采用星形联结,由于三相绕组都连接到中性点,电流换相时,非换相绕组的电流会出现下凹[4 ] .文献[5 ]指出在5种不同的PWM调制模式,在非导通相里都会出现续流.文献[6 ]指出续流会使电动机产生转矩波动.同时由于相绕组之间存在中性点,当某相绕组或其逆变桥出现故障,会对其他相绕组的运行产生影响,导致电动机不能平稳运行,甚至烧坏绕组,不能满足电动机高可靠性要求[7 ,8 ,9 ] . ...
A novel method of reducing commutation torque ripple for brushless DC motor based on Cuk converter
1
2017
... 目前的三相无刷直流电动机大都采用星形联结,由于三相绕组都连接到中性点,电流换相时,非换相绕组的电流会出现下凹[4 ] .文献[5 ]指出在5种不同的PWM调制模式,在非导通相里都会出现续流.文献[6 ]指出续流会使电动机产生转矩波动.同时由于相绕组之间存在中性点,当某相绕组或其逆变桥出现故障,会对其他相绕组的运行产生影响,导致电动机不能平稳运行,甚至烧坏绕组,不能满足电动机高可靠性要求[7 ,8 ,9 ] . ...
一种新的消除无刷直流电动机非导通相续流的PWM调制方式
1
2005
... 目前的三相无刷直流电动机大都采用星形联结,由于三相绕组都连接到中性点,电流换相时,非换相绕组的电流会出现下凹[4 ] .文献[5 ]指出在5种不同的PWM调制模式,在非导通相里都会出现续流.文献[6 ]指出续流会使电动机产生转矩波动.同时由于相绕组之间存在中性点,当某相绕组或其逆变桥出现故障,会对其他相绕组的运行产生影响,导致电动机不能平稳运行,甚至烧坏绕组,不能满足电动机高可靠性要求[7 ,8 ,9 ] . ...
一种新的消除无刷直流电动机非导通相续流的PWM调制方式
1
2005
... 目前的三相无刷直流电动机大都采用星形联结,由于三相绕组都连接到中性点,电流换相时,非换相绕组的电流会出现下凹[4 ] .文献[5 ]指出在5种不同的PWM调制模式,在非导通相里都会出现续流.文献[6 ]指出续流会使电动机产生转矩波动.同时由于相绕组之间存在中性点,当某相绕组或其逆变桥出现故障,会对其他相绕组的运行产生影响,导致电动机不能平稳运行,甚至烧坏绕组,不能满足电动机高可靠性要求[7 ,8 ,9 ] . ...
电力作动器中永磁容错电机及其控制系统的发展
1
2008
... 目前的三相无刷直流电动机大都采用星形联结,由于三相绕组都连接到中性点,电流换相时,非换相绕组的电流会出现下凹[4 ] .文献[5 ]指出在5种不同的PWM调制模式,在非导通相里都会出现续流.文献[6 ]指出续流会使电动机产生转矩波动.同时由于相绕组之间存在中性点,当某相绕组或其逆变桥出现故障,会对其他相绕组的运行产生影响,导致电动机不能平稳运行,甚至烧坏绕组,不能满足电动机高可靠性要求[7 ,8 ,9 ] . ...
电力作动器中永磁容错电机及其控制系统的发展
1
2008
... 目前的三相无刷直流电动机大都采用星形联结,由于三相绕组都连接到中性点,电流换相时,非换相绕组的电流会出现下凹[4 ] .文献[5 ]指出在5种不同的PWM调制模式,在非导通相里都会出现续流.文献[6 ]指出续流会使电动机产生转矩波动.同时由于相绕组之间存在中性点,当某相绕组或其逆变桥出现故障,会对其他相绕组的运行产生影响,导致电动机不能平稳运行,甚至烧坏绕组,不能满足电动机高可靠性要求[7 ,8 ,9 ] . ...
考虑三次谐波抑制的改进型五相永磁电机直接转矩控制
1
2017
... 目前的三相无刷直流电动机大都采用星形联结,由于三相绕组都连接到中性点,电流换相时,非换相绕组的电流会出现下凹[4 ] .文献[5 ]指出在5种不同的PWM调制模式,在非导通相里都会出现续流.文献[6 ]指出续流会使电动机产生转矩波动.同时由于相绕组之间存在中性点,当某相绕组或其逆变桥出现故障,会对其他相绕组的运行产生影响,导致电动机不能平稳运行,甚至烧坏绕组,不能满足电动机高可靠性要求[7 ,8 ,9 ] . ...
考虑三次谐波抑制的改进型五相永磁电机直接转矩控制
1
2017
... 目前的三相无刷直流电动机大都采用星形联结,由于三相绕组都连接到中性点,电流换相时,非换相绕组的电流会出现下凹[4 ] .文献[5 ]指出在5种不同的PWM调制模式,在非导通相里都会出现续流.文献[6 ]指出续流会使电动机产生转矩波动.同时由于相绕组之间存在中性点,当某相绕组或其逆变桥出现故障,会对其他相绕组的运行产生影响,导致电动机不能平稳运行,甚至烧坏绕组,不能满足电动机高可靠性要求[7 ,8 ,9 ] . ...
无刷直流电动机驱动控制容错方案研究
1
2009
... 目前的三相无刷直流电动机大都采用星形联结,由于三相绕组都连接到中性点,电流换相时,非换相绕组的电流会出现下凹[4 ] .文献[5 ]指出在5种不同的PWM调制模式,在非导通相里都会出现续流.文献[6 ]指出续流会使电动机产生转矩波动.同时由于相绕组之间存在中性点,当某相绕组或其逆变桥出现故障,会对其他相绕组的运行产生影响,导致电动机不能平稳运行,甚至烧坏绕组,不能满足电动机高可靠性要求[7 ,8 ,9 ] . ...
无刷直流电动机驱动控制容错方案研究
1
2009
... 目前的三相无刷直流电动机大都采用星形联结,由于三相绕组都连接到中性点,电流换相时,非换相绕组的电流会出现下凹[4 ] .文献[5 ]指出在5种不同的PWM调制模式,在非导通相里都会出现续流.文献[6 ]指出续流会使电动机产生转矩波动.同时由于相绕组之间存在中性点,当某相绕组或其逆变桥出现故障,会对其他相绕组的运行产生影响,导致电动机不能平稳运行,甚至烧坏绕组,不能满足电动机高可靠性要求[7 ,8 ,9 ] . ...
High-efficiency and low acoustic noise drive system using open-winding AC motor and two space-vector-modulated inverters
1
2002
... 开式绕组将电动机绕组间的中性点断开,电动机本体结构不改变,每相绕组连接各自的驱动电路,其特点为:可对各相绕组的电压、电流单独控制,相绕组间电气隔离;导通相绕组上的两个功率开关器件上承受的电压只有直流母线电压的一半,适合高可靠性、高电压大功率驱动场合[10 ,11 ,12 ,13 ] .开式绕组结构为永磁无刷直流电动机抑制换相转矩脉动和提高容错性提供了新的思路. ...
Research on the characteristics of open winding brushless DC motor
1
2019
... 开式绕组将电动机绕组间的中性点断开,电动机本体结构不改变,每相绕组连接各自的驱动电路,其特点为:可对各相绕组的电压、电流单独控制,相绕组间电气隔离;导通相绕组上的两个功率开关器件上承受的电压只有直流母线电压的一半,适合高可靠性、高电压大功率驱动场合[10 ,11 ,12 ,13 ] .开式绕组结构为永磁无刷直流电动机抑制换相转矩脉动和提高容错性提供了新的思路. ...
Flux weakening control of an open winding machine with isolated dualinverters
1
2007
... 开式绕组将电动机绕组间的中性点断开,电动机本体结构不改变,每相绕组连接各自的驱动电路,其特点为:可对各相绕组的电压、电流单独控制,相绕组间电气隔离;导通相绕组上的两个功率开关器件上承受的电压只有直流母线电压的一半,适合高可靠性、高电压大功率驱动场合[10 ,11 ,12 ,13 ] .开式绕组结构为永磁无刷直流电动机抑制换相转矩脉动和提高容错性提供了新的思路. ...
Open-winding power conversion systems fed by half-controlled converters
1
2013
... 开式绕组将电动机绕组间的中性点断开,电动机本体结构不改变,每相绕组连接各自的驱动电路,其特点为:可对各相绕组的电压、电流单独控制,相绕组间电气隔离;导通相绕组上的两个功率开关器件上承受的电压只有直流母线电压的一半,适合高可靠性、高电压大功率驱动场合[10 ,11 ,12 ,13 ] .开式绕组结构为永磁无刷直流电动机抑制换相转矩脉动和提高容错性提供了新的思路. ...
开绕组电机系统拓扑及控制技术研究综述
1
2017
... 开绕组电动机采用双逆变器控制,两个逆变器可以使用两个隔离的直流母线,也可共用一个[14 ] .由于隔离直流母线的开绕组电动机系统需要两条电气隔离的直流母线,使系统结构复杂,并且增加了系统的成本,特别是难以用于只有单个电源供电的场合.开绕组电动机采用一个电源时,两个变流器在电动机端部产生的共模电压使得电动机存在零序电流,增加了电动机的损耗和发热,导致系统的效率和稳定运行能力下降.文献[15 ]提出采用SPWM策略直接对三相坐标系中的电压进行调制,消除三相电压中存在的零序电压分量,实现对零序电流的调节从而降低相电流畸变.本文主要研究单电源供电开式绕组无刷直流电动机的换相转矩脉动,提出采用重叠换相相电流闭环控制方法来抑制,利用滑模观测器观测反电势来计算电磁转矩,通过Matlab仿真和试验来验证转矩脉动抑制效果. ...
开绕组电机系统拓扑及控制技术研究综述
1
2017
... 开绕组电动机采用双逆变器控制,两个逆变器可以使用两个隔离的直流母线,也可共用一个[14 ] .由于隔离直流母线的开绕组电动机系统需要两条电气隔离的直流母线,使系统结构复杂,并且增加了系统的成本,特别是难以用于只有单个电源供电的场合.开绕组电动机采用一个电源时,两个变流器在电动机端部产生的共模电压使得电动机存在零序电流,增加了电动机的损耗和发热,导致系统的效率和稳定运行能力下降.文献[15 ]提出采用SPWM策略直接对三相坐标系中的电压进行调制,消除三相电压中存在的零序电压分量,实现对零序电流的调节从而降低相电流畸变.本文主要研究单电源供电开式绕组无刷直流电动机的换相转矩脉动,提出采用重叠换相相电流闭环控制方法来抑制,利用滑模观测器观测反电势来计算电磁转矩,通过Matlab仿真和试验来验证转矩脉动抑制效果. ...
一种新型绕组开路型永磁电动机起动/发电系统
1
2011
... 开绕组电动机采用双逆变器控制,两个逆变器可以使用两个隔离的直流母线,也可共用一个[14 ] .由于隔离直流母线的开绕组电动机系统需要两条电气隔离的直流母线,使系统结构复杂,并且增加了系统的成本,特别是难以用于只有单个电源供电的场合.开绕组电动机采用一个电源时,两个变流器在电动机端部产生的共模电压使得电动机存在零序电流,增加了电动机的损耗和发热,导致系统的效率和稳定运行能力下降.文献[15 ]提出采用SPWM策略直接对三相坐标系中的电压进行调制,消除三相电压中存在的零序电压分量,实现对零序电流的调节从而降低相电流畸变.本文主要研究单电源供电开式绕组无刷直流电动机的换相转矩脉动,提出采用重叠换相相电流闭环控制方法来抑制,利用滑模观测器观测反电势来计算电磁转矩,通过Matlab仿真和试验来验证转矩脉动抑制效果. ...
一种新型绕组开路型永磁电动机起动/发电系统
1
2011
... 开绕组电动机采用双逆变器控制,两个逆变器可以使用两个隔离的直流母线,也可共用一个[14 ] .由于隔离直流母线的开绕组电动机系统需要两条电气隔离的直流母线,使系统结构复杂,并且增加了系统的成本,特别是难以用于只有单个电源供电的场合.开绕组电动机采用一个电源时,两个变流器在电动机端部产生的共模电压使得电动机存在零序电流,增加了电动机的损耗和发热,导致系统的效率和稳定运行能力下降.文献[15 ]提出采用SPWM策略直接对三相坐标系中的电压进行调制,消除三相电压中存在的零序电压分量,实现对零序电流的调节从而降低相电流畸变.本文主要研究单电源供电开式绕组无刷直流电动机的换相转矩脉动,提出采用重叠换相相电流闭环控制方法来抑制,利用滑模观测器观测反电势来计算电磁转矩,通过Matlab仿真和试验来验证转矩脉动抑制效果. ...
基于分数阶滑模观测的感应电机无速度传感器矢量控制
1
2018
... 对转矩信息的获取可采用直接测量和间接观测两种方法.直接测量法通常在电动机轴上级联力矩传感器来对转矩进行测量,力矩传感器的安装增加了系统的成本和复杂程度,同时力矩传感器的带宽有限,限制了电动机在宽调速范围的应用.转矩间接观测法通常采用状态观测器,以电动机的反电势、电流、转速等易测量为状态变量,对电动机的一些状态量进行观测[16 ] .本文通过滑模观测器对反电势进行观测,通过霍尔位置信息计算电动机转速,传感器采集电流信息,根据式(5)计算得到电磁转矩.滑模观测器原理结构框图如图8 e所示. ...
基于分数阶滑模观测的感应电机无速度传感器矢量控制
1
2018
... 对转矩信息的获取可采用直接测量和间接观测两种方法.直接测量法通常在电动机轴上级联力矩传感器来对转矩进行测量,力矩传感器的安装增加了系统的成本和复杂程度,同时力矩传感器的带宽有限,限制了电动机在宽调速范围的应用.转矩间接观测法通常采用状态观测器,以电动机的反电势、电流、转速等易测量为状态变量,对电动机的一些状态量进行观测[16 ] .本文通过滑模观测器对反电势进行观测,通过霍尔位置信息计算电动机转速,传感器采集电流信息,根据式(5)计算得到电磁转矩.滑模观测器原理结构框图如图8 e所示. ...
电动汽车用永磁同步电机控制器设计
1
2019
... 开式无刷直流电动机试验台如图11 所示,直流电源给控制器供电,控制器的三个H桥逆变电路连接开始绕组无刷电动机的三相绕组,测功机给电动机加额定负载,WT3000电能综合测试仪测量电动机三相绕组的相电压和电流数据,采用硬件电路对反电势、电流以及转速进行采集,计算得到电磁转矩,通过示波器进行测量[17 ] . ...
电动汽车用永磁同步电机控制器设计
1
2019
... 开式无刷直流电动机试验台如图11 所示,直流电源给控制器供电,控制器的三个H桥逆变电路连接开始绕组无刷电动机的三相绕组,测功机给电动机加额定负载,WT3000电能综合测试仪测量电动机三相绕组的相电压和电流数据,采用硬件电路对反电势、电流以及转速进行采集,计算得到电磁转矩,通过示波器进行测量[17 ] . ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}