

1 引言
目前TCPST的控制器多采用一阶动态控制器等利用线性化方法设计,由于稳态运行方式的大幅度调整以及发生大扰动时系统运行点会大幅度偏离平衡点,因此在某个平衡点将系统线性化而根据线性化理论设计的控制器存在失效的可能性,对系统非线性、运行点大范围偏移和大扰动等不确定因素的鲁棒性不好。模糊逻辑控制(Fuzzy Logic Control,FLC)具有较强的鲁棒性。文献[6]在单机无穷大系统中提出了采用模糊逻辑控制器实现TCPST的调节,以发电机的转速差Δω和加速度差 Δ$\dot{w}$作为模糊逻辑控制器的输入信号,得到的输出与移相角参考值比较,再经过带增益的一个一阶惯性环节得到最终的输出信号。其中设计了包含27条IF-THEN规则的TCPST模糊逻辑控制器,通过仿真实验验证了控制器的有效性。本文在研究中发现利用被控量(通常为被控点母线电压)的偏差及偏差变化率作为控制器输入,而将TCPST的移相角ϕ直接作为输出的模糊逻辑控制器时输出出现了严重的抖振现象。
为避免上述现象,本文提出以传统的TCPST一阶动态控制器作为主控制器,以模糊逻辑控制器作为辅助控制器,在暂态过程中由模糊逻辑动态调整传统TCPST一阶动态控制器增益,从而间接完成TCPST控制的方法。由于传统的TCPST一阶动态控制器结构简单,并且在实际工程中已有应用。因此,研究可由模糊逻辑动态调节增益的TCPST一阶动态控制器,对于TCPST的工程应具有积极的作用。
2 TCPST数学模型
安装在系统中i-j节点之间的TCPST,能够用一个具有复变比的理想变压器和相应的等值阻抗表示,如图1所示,图中变压器的复变比 
图1
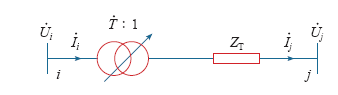
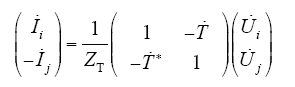
图1中,两端口网络的注入电流与节点电压的关系为
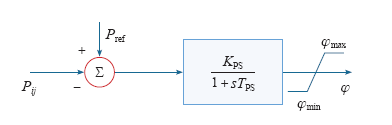
传统TCPST控制器一般为一阶惯性环节,如图2所示。控制器的输入信号通常为移相器所在线路输送的有功功率Pij;有功功率参考值Pref即为稳态控制目标(通常设置线路正常运行方式下的稳态值为控制目标);KPS为控制器增益;TPS为控制器时间常数;ϕmax和ϕmin分别为移相角的上下限。
图2
该控制器的动态方程为
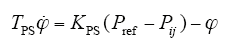
传统的TCPST一阶动态控制器的增益KPS为固定值,本文所设计的TCPST控制器则在系统暂态过程中按照模糊逻辑随系统运行状况动态调节KPS。下面介绍TCPST模糊逻辑控制器的设计方法。
3 模糊逻辑控制
3.1 模糊集合
模糊集合是经典集合的推广,它能够描述一些并不具备清晰边界的集合,可弥补经典集合的局限性。
定义3.1 如果在论域U到值域[0,1]给定了一个映射

则称A是U上的模糊集;μA(x)称为模糊集A的隶属度函数(membership function),μA(x)的取值范围为[0,1]。
与经典集合相同,模糊集合也有“交”、“并”和“补”等基本运算。
定义3.2 设模糊集合A和B同属于论域U,记模糊集A∩B和B∪A分别为A与B的交集和并集,记模糊集
3.2 模糊逻辑控制器基本结构
图3
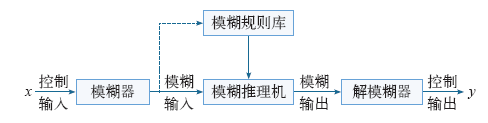
模糊规则库与模糊推理机是模糊逻辑控制器最重要的部分。模糊规则库通常是借助专家知识或经验设定的m条IF-THEN形式的逻辑推理规则。规则库中第l条IF-THEN规则Rul的基本形式为
Rul:如果x1为A1l且x2为A2l且…且xn为Anl,则y为Bl。
规则Rul中x1,x1,…,xn和y为模糊规则的语言变量,A1l,A1l,…,Anl和Bl为模糊规则语言变量的值。
模糊逻辑控制器首先通过模糊器利用相应的模糊化方法,将被控对象的清晰非模糊输入(crisp inputs)转化为模糊推理系统能够识别的模糊输入(fuzzy inputs),完成物理量向模糊集合的转变。模糊推理机则利用模糊规则库制定的推理逻辑,将模糊器转换的模糊输入进行处理,给出相应的模糊输出(fuzzy outputs)。最终模糊逻辑控制器再通过解模糊器,将模糊推理机输出的模糊集合转换为实际控制工程中需要的清晰输出(crisp outputs)。本文选择单值解模糊器、乘积推理机和中心平均解模糊器设计模糊逻辑控制器。该模糊逻辑控制器的输入x和输出y之间的关系为
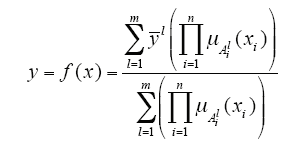
其中,\(\bar{y}^l\)为标准模糊集Bl的中心。
由式(3)可以看出,图3的模糊逻辑控制器是一个非线性映射。当已知一个确定的数值输入x时,模糊逻辑控制器经过该非线性映射能够给出清晰的数值输出y。
4 TCPST模糊逻辑控制器设计
4.1 TCPST模糊逻辑控制器框架
目前采用的模糊逻辑控制器有两种主要形式:利用模糊逻辑控制器直接取代原有的传统控制器;将模糊逻辑控制和传统的控制方法结合形成混合模糊控制器。目前已有文献中的TCPST模糊逻辑控制器均属于第一种模糊逻辑控制器,即模糊逻辑控制器是以TCPST的移相角ϕ直接作为控制输出。本文尝试利用模糊逻辑调节传统TCPST一阶动态控制器的方法实现第二种TCPST模糊逻辑控制器的设计。该TCPST模糊逻辑控制器的框架结构如图4所示。
图4
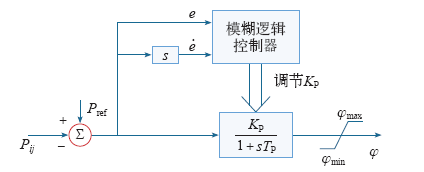
图4中模糊逻辑控制器的输入量为被控线路功率P和预设功率Pref的偏差e及其变化率
4.2 模糊子集的划分
模糊逻辑控制器设计的核心之一是IF-THEN策略表的制定。而IF-THEN策略是根据模糊集合制定的,下面首先介绍模糊输入集合的确定。
图5
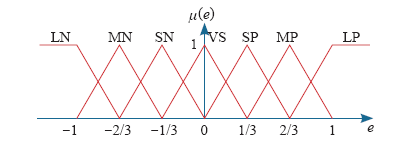
以e的模糊子集LN为例,该模糊子集的隶属度函数具体表达式为
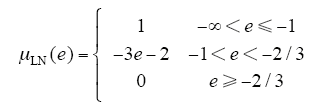
其他模糊子集的隶属度函数与式(4)相似,此处不再一一给出详细表达式。
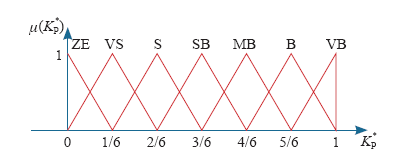
由图4可知,本文设计的模糊逻辑的输出为传统TCPST控制器的增益KP,为编程的通用性,首先将KP进行规格化处理,即
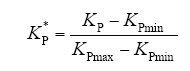
其中,KP*为规格化后的模糊逻辑控制器输出KP。与模糊逻辑控制器的输入e和
图6
4.3 模糊逻辑控制器控制策略
模糊逻辑控制器的输出KP*由如下的模糊规则确定:
如果e是A且
A、B和C对应输入e和
表
Tab.
| e | LN | MN | SN | VS | SP | MP | LP |
|---|---|---|---|---|---|---|---|
| LN | VB | VB | VB | S | VS | VS | ZE |
| MN | VB | VB | MB | SB | S | S | S |
| SN | VB | B | B | MB | VS | MB | SB |
| VS | B | B | VB | ZE | VB | B | B |
| SP | SB | MB | VS | MB | B | B | VB |
| MP | S | S | S | SB | MB | VB | VB |
| LP | ZE | VS | VS | S | VB | VB | VB |
在制定上表中的IF-THEN控制策略时,本文主要考虑了如下准则[8]:
(1)努力使控制器有一个较小的超调量和调节时间。
(2)能够尽可能减少由于信号传递采集或者系统自身死区带来的控制延迟。
(3)为了确保系统被控量尽量维持在预设点,在预设点附近需要考虑尽可能多的控制器输出情况,避免超调的发生。
(4)控制器能够尽可能有好的鲁棒性。
根据控制需求而制定的以上四个模糊规则在系统不同的运行情况下,通过模糊逻辑控制器自动调节控制器的增益。
根据e、
图7
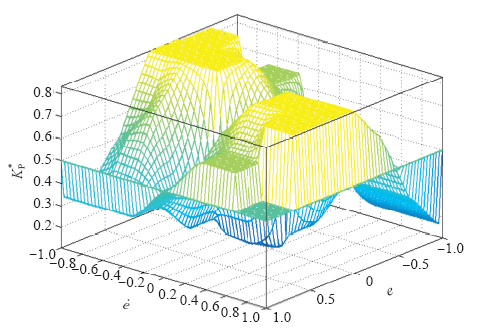
由图7可以看出模糊逻辑控制器输入输出关系式(3)的非线性特性。
根据模糊逻辑控制器确定的KP*,可以将KP*还原为实际控制器需要的KP,即

5 算例分析
图8
本文设计的模糊逻辑控制器采用TCPST所在支路传输的有功功率与稳态时预设的传输功率的偏差及偏差的变化率为输入信息。选取稳态增益KPo = 15,KP的变化范围为[8,25],即KPmin = 8,KPmax = 25。时间常数Tp = 0.2。具体的仿真结果如下。
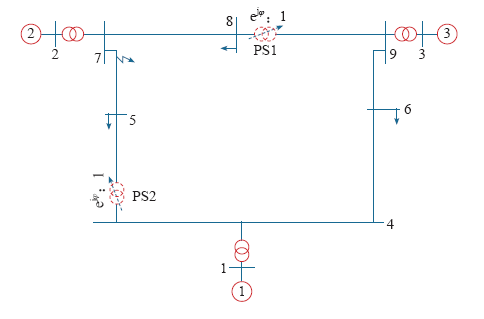
5.1 仿真算例I
若在母线7处发生三相短路故障,故障100ms后切除5-7支路,再经过500ms支路5-7自动重合闸成功。系统中不安装TCPST、安装一台TCPST(8-9支路PS1)和安装两台TCPST(8-9支路和4-5支路)三种不同情况时,发电机2和发电机1的功角摆动曲线如图9所示。
图9
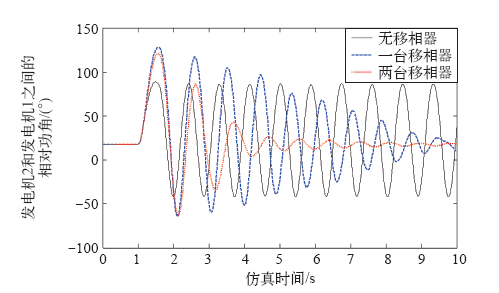
从图9可以看出,当不安装TCPST时,系统一直在等幅振荡;当系统安装一台TCPST时,系统可以保持稳定,但后续摇摆衰减的速度相对较慢;当系统安装两台TCPST时,系统能够保持稳定且后续的摇摆很快得到了有效的抑制。
仿真结果表明,采用TCPST模糊逻辑控制可以有效地抑制系统振荡,这一趋势与传统P型控制器一致。
5.2 仿真算例II
当系统中只安装一台TCPST(8-9支路PS1)时,在仿真算例I相同条件下,模糊P型控制器和传统P型控制器的控制效果对比情况,如图10所示。
图10
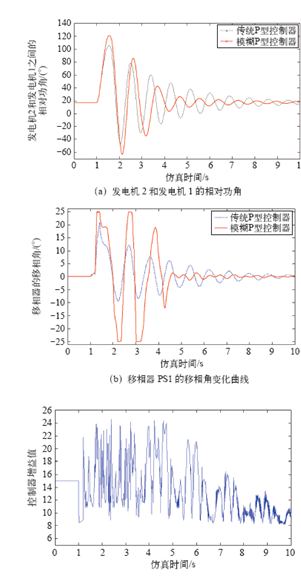
图10
模糊P型控制器与传统P型控制器控制效果对比
Fig.10
Comparison between FLC and convintional controller
综上表明,本文设计的模糊逻辑控制器,在不同仿真情况下,均比传统P型控制器有更好的控制效果。
6 结论
目前已有文献中所研究的TCPST模糊逻辑控制器均以TCPST的移相角直接作为模糊控制器的输出。本文设计了一种利用模糊逻辑动态调整传统TCPST一阶动态控制器增益的新型TCPST模糊逻辑控制器。该类型模糊逻辑控制器以传统控制的增益KP作为输出,间接完成对TCPST的控制,因而是一种模糊逻辑控制与传统线性控制的混合控制。对安德森3机9节点系统的暂态仿真结果表明,本文所设计的模糊逻辑控制器既能提高电力系统的暂态稳定性,也可以加速暂态过程中线路功率振荡的恢复。但模糊逻辑控制器输出的KP存在抖振问题,需要后续采取措施进行改进。
参考文献
现代电力系统暂态稳定控制研究综述
[J].
A survey on transient stability control of modern power systems
[J].
Flexible AC transmission system
[M].
Control algorithm for a static phase shifting transformer to enhance transient and dynamic stability of large power systems
[J].DOI:10.1109/TPAS.1982.317580 URL [本文引用: 1]
Analysis of thyristor-controlled phase shifter applied in damping power system oscillations
[J].
DOI:10.1016/j.jneumeth.2019.108562
URL
PMID:31862376
[本文引用: 1]

Peripheral nerve interfacing has many applications ranging from investigation of neural signals to therapeutic intervention for varied diseases. This need has driven technological advancements in the field of electrode arrays and wireless systems for in-vivo electrophysiological experiments. Hence we present our fully implantable, programmable miniaturized wireless stimulation and recording devices.
TCPS controller design using fuzzy logic controller for power system stability enhancement
[C].
A self-tuning fuzzy PI controller
[J].
DOI:10.1086/599252
URL
PMID:20614761
[本文引用: 2]
Research on the emotional consequences of interactive service work remains inconclusive in large part because scholars have not analyzed the mechanisms that lead frontline employees to adopt the meanings disseminated by their employers. The authors argue that the theoretical framework best suited for remedying this situation is the negotiated order perspective. It suggests that whether employees adopt a corporate-sanctioned meaning, and with what emotional effect, depends on the conjunction of several social conditions. The authors also propose a novel analytical strategy that can identify these conditional pathways and formalize the combinatorial logic of the negotiated order perspective: fuzzy-set techniques. To illustrate the utility of this approach, the article examines a university hospital that has tried to create a more meaningful and emotionally rewarding work environment for its nursing staff. Consistent with expectations, findings show that employees can embrace the same corporate-sanctioned meaning under different sets of conditions and with different emotional consequences.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}