


1 引言
高性能的伺服驱动系统往往采用高分辨率和高通信速度的编码器作为电机的位置传感器,以获得精确的位置和速度信息[1]。高分辨率和高速度的编码器通常采用全双工同步串行通信方式,实现高速度、高数位和高可靠性的数字信号传输,以满足伺服驱动系统闭环控制的要求。而减少通信线缆数量和接口数量也是目前长距离、高可靠数据传输的新趋势。
本文基于BISS-C协议开发了直流载波通信系统。BISS-C协议是开放式同步串行协议,其通信波特率可达10Mbit/s,具有开放性、高速性等优点,在组网方式和延迟补偿方面较其他接口具有领先优势,主要应用于运动控制领域,实现伺服驱动器与编码器的通信功能。本文基于电力线载波通信技术,在不改变原有BISS-C协议通信方式的基础上,利用直流电源线进行双向通信。
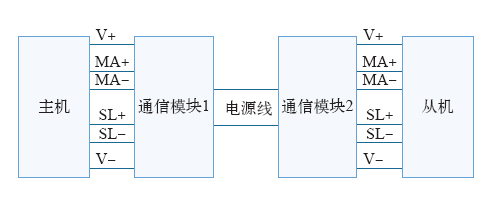
直流载波通信系统通信结构如图1所示。主机与通信模块1以及从机与通信模块2之间仍然基于BISS-C的全双工同步串行通信,而两通信模块之间采用半双工异步串行通信。
图1
2 BISS-C协议
2.1 BISS-C组网方式
BISS-C协议有两种组网方式,分别是点对点模式和总线模式。
主控制器接口(master)上仅连接一个带有若干从接口(slave)的设备的方式为点对点模式。主控制器接口通过MA差分信号线给从接口提供时钟,而从接口通过SL差分信号线将传感器数据从第一个接口(first slave)传送回主控制接口。主控制器接口与从接口可以进行双向通信。其结构如图2a所示。
图2
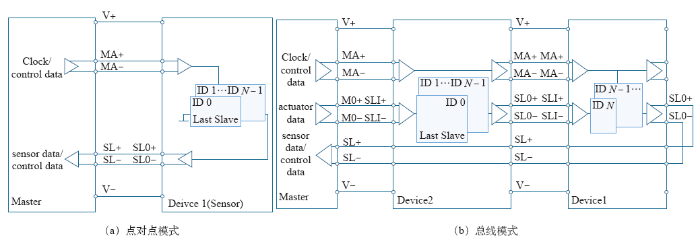
对于总线配置,所有设备均呈链状连接,每一个设备还可以包含多个从接口。主控器的MA线同时对所有的从动器提供时钟脉冲。每个从接口有两个端子(SLO和SLI),下一个从动器的输入(SLI)链接到前一个从动器的输出(SLO)。每个从接口优先发送自身的数据,然后将接收到的数据放在发送队尾。该协议所连接的从动器数量没有限制,其结构如图2b所示。
2.2 BISS-C帧结构
图3为标准BISS-C单周期数据(SCD)帧传输时序图。MA为主站发出的同步时钟,在传输结束时(BISS Timeout期间),MA发出1位反相的主站控制数据(CDM)。SLO为从站发回的传感器数据和1位从站控制数据(CDS),CDS是对前一个SCD帧CDM的回应。不需要发送控制数据时,CDM=0,CDS=0。
图3

图3
标准BISS单周期数据传输时序图
Fig.3
Sequence diagram of standard BISS single cycle data transmission
由于一个SCD帧主站只能发出1位CDM,从站也只能发回1位CDS,因此,需要多个SCD帧才能完成一组控制命令的发送和接收。
3 载波模块的软硬件设计
3.1 硬件设计
通信模块基于Altera公司的飓风4代产品EP4C6E设计,分别作为通信模块1和通信模块2的核心芯片(FPGA)。在通信模块1中,FPGA充当主控制器的从机,用来向主控制器提供由电源线上读入的数据。在通信模块2中,FPGA充当传感器(通常为编码器)的主机,用来对绝对位置光电编码器进行位置读取,采用点对点连接。
由于在未接入旋转编码器时主机与传感器的通信为RS 485差分方式,因此,加入电源线载波通信模块后,即通信模块1和通信模块2需要将FPGA输出的电平信号转换成差分信号。本文采用的是TI公司生产的SN65HVD78D电平转换芯片。
图4
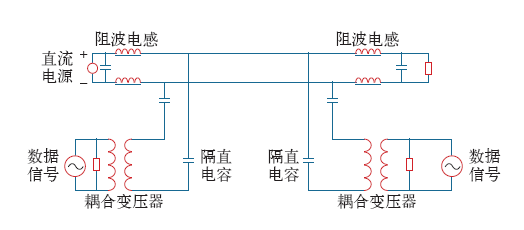
图4为耦合电路的整体结构,变压器充当耦合和解耦的原件。阻波电感的作用是防止电源线上的高频信号被直流电源短路,而隔直电容则是隔离电源电压。图中阻波电感取100μH,隔直电容取0.47μF。
3.2 软件设计
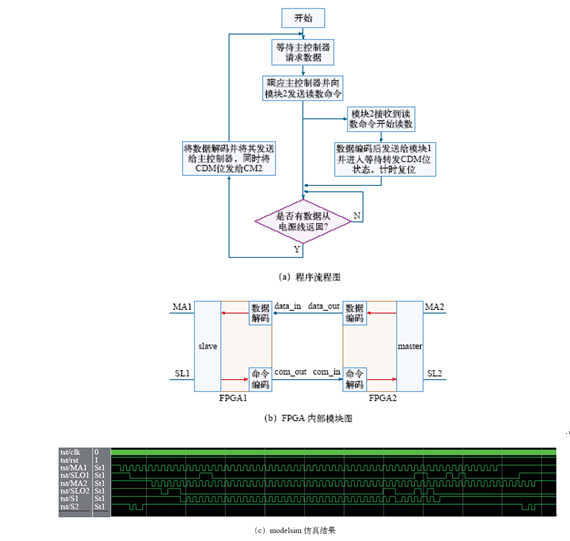
程序在Quartus II软件编译环境下,使用Verilog HDL语言进行编写。采用的编写方式为自底向上模块化编写。对于通信模块1,底层模块有输出模块、采样模块、解码模块、编码模块和命令生成模块,顶层模块则为状态机模块,其主要负责各底层模块的初始化以及功能调用。对于通信模块2,底层模块有读数模块、采样模块、解码模块、编码模块和命令判断模块,顶层模块则为状态机模块,主要负责各底层模块间的调用及初始化。底层模块的CLK时钟由锁相环(Phase Locked Loop,PLL)分频或倍频提供。各模块间的工作流程如图5a所示。
图5
编码方式采用差分曼彻斯特编码。对原始数据进行编码的原因是原始信号中可能存在较大的直流分量,这不利于变压器的耦合。而差分曼彻斯特码在原码的每一个码元的中间位跳变,这保证了编码后的信号中不含直流分量。编码后的数据中可提取出时钟信号用于同步,且与曼彻斯特码不同的是,差分曼彻斯特码不存在编码歧义。
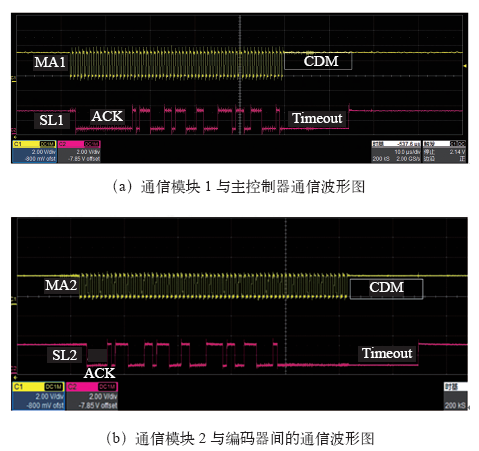
根据BISS-C协议标准,每次只进行一个SCD帧的数据传输,而且数据处理时间tbusy和帧结束标志时间BISS-Timeout可以通过延时和设置改变。利用这些特点,本文提出并行数据读取和传送的方案。为便于论述,记通信模块1和通信模块2分别为CM1和CM2。主机与通信模块1间的时钟信号记为MA1,数据信号记为SL1。记通信模块2与从机间的时钟信号为MA2,数据信号记为SL2。两通信模块间的载波信号为PLC。
如图5b所示,当主控制器读取数据时,也即MA1有时钟脉冲,CM1在MA1的第二个上升沿拉低SL1以响应主控制器,此时CM1会向CM2发送一个读取数据的命令,接到该命令的CM2开始发出MA2脉冲并读入编码器给出的数据。CM2读数据的同时将已读到的数据进行编码并输出。得到数据后的CM2开始进行解码,解码的同时将数据发送给主控制器,并在一帧数据的末尾读取CDM位电平,并将该电平转发给CM2模块。CM2将转接得到的CDM位发送给传感器,至此,一个完整的SCD帧传送结束,并等待下一次的数据请求。
发送命令时,以1位低电平的起始位(start)开始,然后跟随2位的命令字,最后以1位高电平的停止位(stop)结束。与传送数据不同的是,传感器数据编码后的波特率比命令编码后的波特率要低,目的是缩减整个SCD帧完成所用时间。
实际上,PLC载波电缆上的差分曼切斯特编码频率与MA2的同步脉冲频率一致,即CM2读数据与传送数据频率相同,可共用一个脉冲信号。
图5c为整个软件的modelsim仿真波形图,可以看出整个系统的工作流程。MA1为主控制器发出的脉冲,SLO1为通信模块1(CM1)返回给主控制器的数据。MA2为通信模块2(CM2)发出的脉冲,SLO2为传感器返回的传感器数据(SCD帧)。而S1和S2为载波信号,相当于上文所述的PLC,分别代表编码后的数据信号和编码后的命令信号。
4 实验及结果分析
为验证该方案的可行性,本文搭建了基于伺服系统的实验验证平台,如图6所示。为验证该直流载波通信系统的性能,分别进行了如下实验。
(1)通信带宽实验。实验结果为该系统可进行可靠的通信带宽为500K~10Mbit/s之间。
(2)通信延迟验证实验。实验结果为在波特率为1.25Mbit/s的情况下,通信延迟在3μs以内,符合伺服系统的精度要求。
(3)误码率验证实验。经过24h不间断对伺服电机进行位置读取,测得误码率小于1E-9。
(4)抗干扰实验。为检测直流通信系统的抗干扰性能,在实验中人为地引入干扰,并观察系统是否能较快恢复正常通信状态。干扰方法为用一个5Ω的电阻接在两根直流电源线间,人为造成信号的短路。结果显示,当撤去干扰时,系统立即恢复正常通信状态。
图6

图7
5 结束语
本文研究了BISS-C协议的接口特点和工作原理,并根据简化通信系统的需求,设计并实现了利用电力线载波技术在直流电源线上进行BISS-C协议通信。针对直流信道的特性设计了能够满足高频通信的耦合电路,并开发出以FPGA为硬件核心的通信模块结构。在详细分析BISS-C协议的基础上,本文提出了基于FPGA并行通信的时序解决方案。实验表明,该方案完全能够保证BISS-C协议下的通信性能要求。
参考文献
基于BISS-C协议的编码器的接口技术研究及其在伺服驱动系统中的应用
[J].
The encoder interface technology research based on BISS-C protocol and its application in the servo drive system
[J].
Design of a broadcasting modem for a DC PLC scheme
[J].DOI:10.1109/TMECH.2006.882983 URL [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}