

1 引言
相比较传统直流电机,无刷直流电机采用位置传感器检测转子位置结合电力电子变换器实现换向功能,构成基于无刷直流电机的电动舵机伺服系统,具有使用寿命长、转速高、重量轻、体积小且可靠性高等众多优点,推动着舵机伺服系统向着高转速、大功率、大转矩、多功能以及微型化方向不断发展。然而电动舵机伺服系统特殊的工作环境,如热电池带来的高温、高压环境影响及飞行器复杂的电磁环境等,对驱动电机的可靠性等提出了更高的要求,传统无刷直流电机的霍尔或光电式位置传感器严重制约其构成的舵机伺服系统的应用领域。无刷直流电机无位置传感器技术消除了位置传感器所带来的不便和干扰,并减小了电机的体积、重量,特别适用于舵机的特殊应用场合,成为扩展未来电动舵机应用领域的关键技术[3,4]。
因此,本文在舵机伺服系统工作原理基础上,针对舵机伺服系统对驱动电机的反复多次起动加速的要求,采用一种短时脉冲注入法判别其电机转子初始位置,结合外同步加速和自同步运行的无位置传感器起动法,实现基于无位置传感器的舵机伺服系统快速响应的功能。并将其与传统带位置传感器的舵机伺服系统相比较,验证了本文提出的无位置传感器控制方案的可行性。
2 舵机伺服系统舵面跟踪原理
2.1 无刷直流电机全转速范围内的无位置传感器 控制方法
舵机伺服系统中,为快速响应舵面的偏转信号,无刷直流电机需要快速实现起动—加速—减速运行,即要求在全转速范围内快速响应。传统的三段式无位置控制方式,由于初始定位所需时间较长,无刷直流电机反复起动加速过程延时时间较长,将导致舵机伺服系统的响应速度变慢,并影响其响应频率的带宽。
脉冲注入法作为无刷直流电机无位置起动控制的有效方法[5],在电机360°电角度周期内,每隔60°分析施加6个电压短时脉冲,根据电机磁路饱和特性对电机绕组电感的影响,通过检测6个响应脉冲电流的幅值大小来判定转子当前位置,并作为下一周期加速脉冲的触发相序,循环重复,检测脉冲和加速脉冲复合使用,可以实现无刷直流电机的闭环加速运行。但是短时脉冲法通常仅适用于无刷直流电机的低速状态闭环加速,随着电机转速提高,换向频率变快,外同步控制所施加的加速脉冲宽度就会不断减小,在相邻的两个较短的加速脉冲之间再施加6个检测脉冲来检测转子的位置,实现过程较为困难,并且该6个检测脉冲中有3个脉冲产生的是反向电磁转矩,大大增加了位置检测过程中电机的噪声以及控制的复杂性,可能会导致电机加速失步。
因此本系统中短时脉冲注入法仅用于检测电机转子当前位置,加速过程采用外同步的方法,缩短加速过程的耗时,很好地满足了位置伺服系统对于快速性的要求,待电机的转速足够高时,再切换到反电势检测的自同步运行状态。当电机的转速较高时,舵机运行在自同步运行状态,而当电机的转速较低时,就切换到外同步驱动运行状态,这样通过不断地切换电机的运行状态模式,实现位置跟踪的功能。电机全速范围内运行方式如图1所示,虚线框内电机外同步运行,虚线框外电机自同步运行,We为状态切换点的速度。
图1
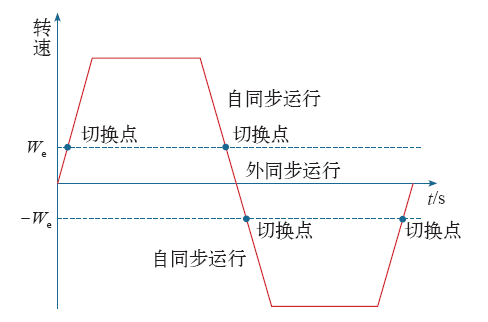
图1
全速范围内实现位置跟踪的原理图
Fig.1
Schematic diagram of the position tracking in the whole speed range
2.2 舵机伺服系统控制方法
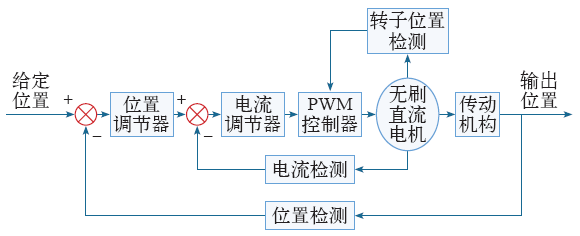
位置闭环、速度闭环和电流闭环组成的三环结构,是目前被普遍认同的位置伺服系统的控制结构。在有位置传感器下,一般通过测量相邻位置信号输出脉冲的时间间隔,来实时计算电机的转速,当电机的转速较低时,采用该方法计算得到的转速与真实的电机转速会存在着较大的偏差,这个误差会直接影响到整个位置伺服系统的低速性能。而当电机采用无位置传感器控制技术时,由于低速状态下转子位置无法检测,电机转速的测算也就无法实现,即无法实现基于三环结构的系统控制方案。并且在位置伺服系统中,对系统位置响应的动态性能要求较高,而对速度控制的精度无特殊要求,速度环作为控制结构中的串联环节,不仅会降低系统位置调节的动态响应性能,而且提高了系统的阶数,容易引起系统振荡,同时三环调节器的设计与调试也增加了难度[6],本系统采用位置和电流组成的双闭环结构系统控制框图如图2所示。内环为电流环,外环为位置环,其中外环有位移传感器用来检测舵面的位移,这时可以利用给定位置与反馈位置的偏差量,再根据电机正反转所应导通的逆变器相序,导通相应的功率管从而实现电机正反转。当偏差大于零时,触发电机正转的相序,施加在伺服电机上的平均电压为正,舵面正方向偏转;而当位移偏差小于零时,则触发电机反转的相序,施加到伺服电机上的平均电压为负,舵面反方向偏转。这样在去掉速度环之后,通过正反转的鉴别也能实现电机正反转。位置环经过位置调节器后的输出作为电流环的给定,电流环输出去控制PWM占空比,从而调节输出电压,达到控制电机转速的目的,实现位置跟踪。
图2
3 舵机伺服系统仿真分析
3.1 动静态仿真分析
图3
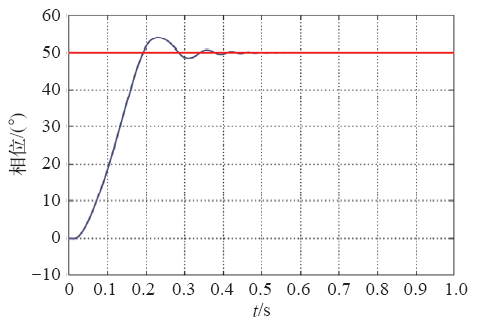
图3
50°阶跃信号的舵面响应仿真波形
Fig.3
Simulation waveforms of the rudder for the step response of 50°
表1 50°阶跃信号的仿真性能参数对比
Tab.1
| 性能参数 | 无位置传感器 | 有位置传感器 |
|---|---|---|
| 滞后时间/s | 0.012 | 0.005 |
| 上升时间/s | 0.122 | 0.12 |
| 峰值时间/s | 0.231 | 0.219 |
| 调节时间/s | 0.314 | 0.3 |
| 超调量(%) | 7.8 | 5.52 |
| 稳态误差/(°) | 0 | 0 |
相比较有位置传感器的舵机伺服系统响应特性,本系统的响应略滞后于有位置传感器控制方式,并且由于采用开环加速的方式,导致了系统响应的速度要比有位置传感器控制方法下稍慢,同时无位置传感器方法采用外同步运行和自同步运行不断切换的控制方式,因而系统响应的超调量要比有位置传感器控制方法的大,振荡的次数要多。但是综合比较可见,短时脉冲注入法下系统的动、静态性能与电机在有位置传感器控制方法下的动、静态响应性能相接近。可见,基于无位置传感器控制方案的舵机伺服系统对阶跃信号的响应具有较好的动、静态性能。
3.2 带宽特性仿真分析
图4为正弦信号的舵面响应波形,其中图4a中 0.5Hz、50°的正弦信号响应波形,低频条件下的正弦信号的舵面跟踪性能较好,不存在跟踪误差。采用幅值为1.8°的正弦信号扫频,通过不断增大正弦信号的频率,测试舵机的输出带宽。图4b所示的是24Hz、1.8°的正弦信号响应波形,此时反馈信号幅值已经衰减2dB,因而得出短时脉冲注入法下,无刷直流电机舵机伺服控制系统的正弦响应带宽为24Hz,即基于无位置传感器控制方法的舵机伺服系统的带宽为24Hz。相比较有位置传感器下无刷直流电机舵机伺服系统的正弦带宽频率为25Hz,基于无位置传感器方法的舵机伺服系统对输入信号的跟随能力以及对干扰信号的抑制能力,基本达到了在有位置传感器控制方法下舵机伺服系统的性能指标。
图4
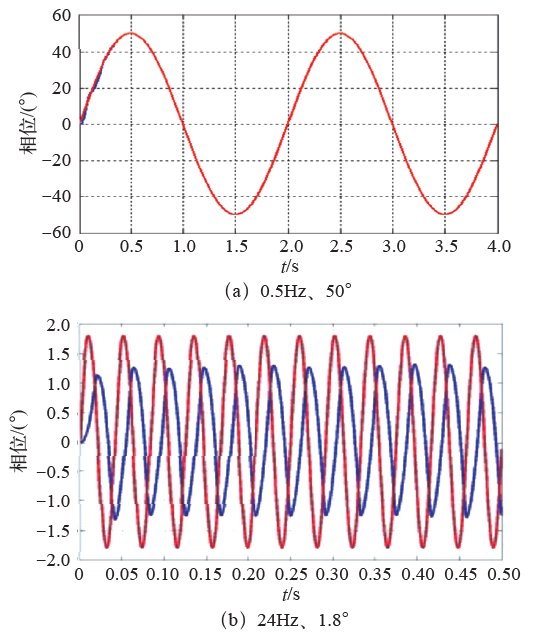
图4
正弦信号的舵面响应仿真波形
Fig.4
Simulation waveforms of the rudder for the sinusoidal response
4 系统试验验证
基于SLBLDCM无刷直流电机舵机伺服系统的主控单元主要由控制芯片TMS320F2812及其外围电路构成。系统的整体硬件控制框图如图5所示,由TMS320F2812主控电路、电压和电流采样调理电路、隔离驱动电路以及由IPM智能控制模块构成的逆变器电路组成。
图5
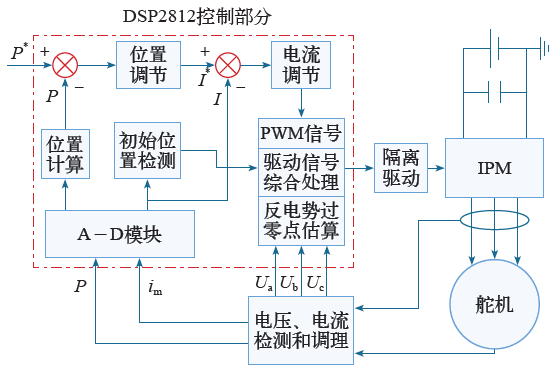
图5
基于SLBLDCM舵机伺服系统的硬件框图
Fig.5
Hardware diagram of the rudder servo system based on SLBLDCM
4.1 阶跃信号响应
在阶跃信号作用下,对本文所设计的舵机控制器进行动、静态性能的测试。给定幅值为5V的阶跃信号,舵机伺服系统关于响应的滞后时间、超调量、上升时间以及调节时间的波形分别如图6a、6b、6c和6d所示。从图6a可以看出,系统响应有一定的滞后,滞后的时间为10ms,主要是由于电机的初始位置检测过程(2.4ms)以及系统本身的响应延时所导致的;图6b显示位置响应存在一定的超调,经测算超调量为9.4%,达到了有位置传感器下舵机伺服系统超调量小于10%的要求,同时由于采用了外同步运行与自同步运行不断切换的控制方式以及位置跟踪过程中PI调节器的作用,使得系统响应出现了4次周期振荡,最终位置反馈曲线与位置给定曲线重合,稳态误差几乎为零;图6c所示的是系统响应的上升时间,在本系统中,位置响应从给定位置幅值的10%上升到给定位置幅值的90%所需要的时间为75ms;系统响应的调节时间如图6d所示,经过计算,从系统开始响应到位置反馈幅值到达并保持在位置给定幅值 5%范围内所需要的时间为170ms。
图6
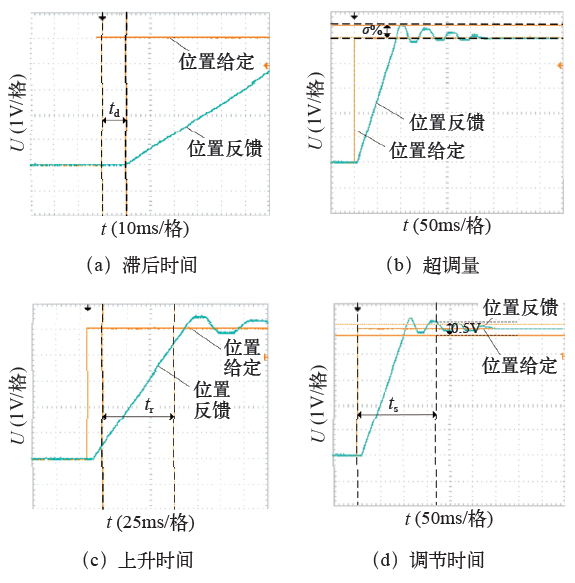
将其与有位置传感器的系统性能进行比较,见表2,系统响应的动、静态性能已经接近于系统在有位置传感器下的响应性能,并且实验结果与仿真分析相一致。
表2 舵机伺服系统动、静态性能的比较
Tab.2
| 性能参数 | 无位置传感器 | 有位置传感器 |
|---|---|---|
| 滞后时间td/ms | 10 | 7.2 |
| 超调量σ(%) | 9.4 | 8.8 |
| 上升时间tr/ms | 75 | 68 |
| 调节时间ts/ms | 170 | 120 |
| 稳态误差/V | 0 | 0 |
4.2 带宽特性
系统对于正弦信号的响应波形如图7所示,正弦波幅值为1V,频率分别为1Hz、5Hz以及15Hz。从图中可以看出,1Hz和5Hz正弦信号跟踪曲线较平滑,跟踪的误差较小,动态性能和稳态性能都比较好。当频率增加到15Hz时,系统响应滞后较多,主要由于位置伺服系统等效为一个二阶系统,随着给定位移信号的频率不断增大,采用PI调节器控制后,反馈波形存在一定的衰减和滞后。
图7
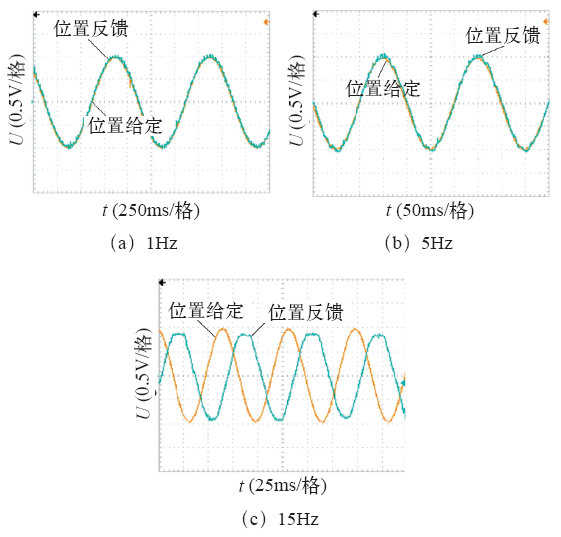
图8
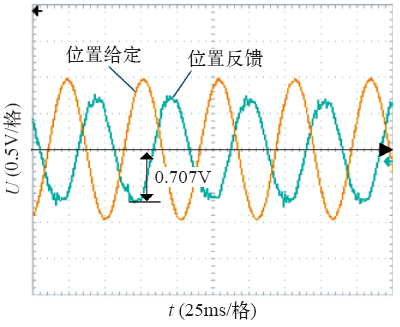
图8
基于无位置传感器的舵机伺服系统1V、19Hz正弦信号实验波形
Fig.8
Experiment waveforms of 1V and 19Hz sinusoidal response for the rudder servo system based on SLBLDCM
图9
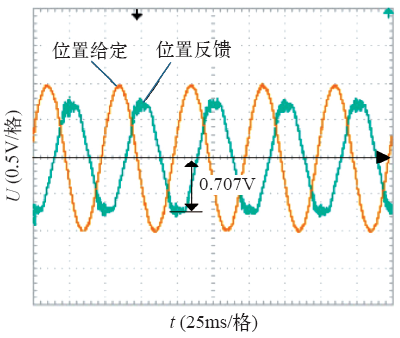
图9
基于有位置传感器的舵机伺服系统1V、20Hz正弦信号实验波形
Fig.9
Experiment waveforms of 1V and 20Hz sinusoidal response for the rudder servo system based on SLBLDCM
5 结论
(1)本文在无刷直流电机无位置传感器控制技术的基础上,提出一种基于无位置传感器控制方法的双闭环舵机伺服系统,解决了无刷直流电机位置伺服系统中电机的频繁起动问题,有效地提高了无位置传感器无刷直流电机舵机伺服系统的性能。
(2)搭建了基于无位置传感器的舵机伺服系统硬件系统,并进行了实验验证,分别施加阶跃信号和正弦信号,对系统的动、静态性能和带宽进行了实验分析,并与有位置传感器控制方式下舵机的实验结果进行了比较。从实验结果的分析与比较来看,本文所设计的无位置传感器控制方案能够实现对舵面位置的高性能跟踪,达到接近于舵机在有位置传感器控制方式下的响应性能。
参考文献
High-performance electro mechanical direct-drive actuators for flight cehicles
[C].
High-torque density electronic systems
[J].
DOI:10.1002/advs.201802251
URL
PMID:30989034
[本文引用: 1]

Energy autonomy is critical for wearable and portable systems and to this end storage devices with high-energy density are needed. This work presents high-energy density flexible supercapacitors (SCs), showing three times the energy density than similar type of SCs reported in the literature. The graphene-graphite polyurethane (GPU) composite based SCs have maximum energy and power densities of 10.22 µWh cm-2 and 11.15 mW cm-2, respectively, at a current density of 10 mA cm-2 and operating voltage of 2.25 V (considering the IR drop). The significant gain in the performance of SCs is due to excellent electroactive surface per unit area (surface roughness 97.6 nm) of GPU composite and high electrical conductivity (0.318 S cm-1). The fabricated SCs show stable response for more than 15 000 charging/discharging cycles at current densities of 10 mA cm-2 and operating voltage of 2.5 V (without considering the IR drop). The developed SCs are tested as energy storage devices for wide applications, namely: a) solar-powered energy-packs to operate 84 light-emitting diodes (LEDs) for more than a minute and to drive the actuators of a prosthetic limb; b) powering high-torque motors; and c) wristband for wearable sensors.
Simple starting-up method of BLDC sensorless control system for vehicle fuel pump
[C].
无位置传感器无刷直流电动机无反转起动及其平滑切换
[J].提出了一种隐极式无刷直流电动机的无反转起动及其平滑切换新方法。根据电动机定子铁心饱和效应, 采用短时脉冲检测方法实现转子定位与加速。针对“三段式”起动方法切换的缺点, 提出了在一定转速时关闭所有开关器件, 利用电动机端电压波形与导通相之间的对应关系实现平滑切换的方法。反电动势过零点检测选在PWM调制信号开通状态结束时刻, 在对端电压进行采样后由软件算法确定真实过零点。样机试验结果验证了本文提出方法的可行性和有效性。
Anti-reverse rotation startup and smoothly switching of sensorless brushless DC motor
[J].提出了一种隐极式无刷直流电动机的无反转起动及其平滑切换新方法。根据电动机定子铁心饱和效应, 采用短时脉冲检测方法实现转子定位与加速。针对“三段式”起动方法切换的缺点, 提出了在一定转速时关闭所有开关器件, 利用电动机端电压波形与导通相之间的对应关系实现平滑切换的方法。反电动势过零点检测选在PWM调制信号开通状态结束时刻, 在对端电压进行采样后由软件算法确定真实过零点。样机试验结果验证了本文提出方法的可行性和有效性。
一种新颖的无刷直流电机无位置传感器控制系统
[J].
A novel sensorless control system of brushless DC motors
[J].
位置/电流两环结构位置伺服系统的跟随性能
[J].位置闭环、速度闭环和电流闭环组成的三环结构, 是目前被普遍认同的位置伺服系统控制结构。然而在某些特定场合, 例如点对点运动控制场合中, 重点是要求系统位置响应的动态性能, 而对速度调节的性能要求并不高。这时, 速度闭环不仅没有发挥作用, 还作为控制结构中的串联环节, 降低了系统位置调节动态响应性能。针对这些特定的场合, 本文研究了全数字位置闭环和电流闭环组成的两环结构位置伺服系统, 并利用阶跃响应性能和梯形响应性能, 在相同命令信号和相同控制对象的条件下, 与三环系统作比较。仿真和实验结果显示, 两环系统的位置动态响应时间小于三环系统, 并且两环系统中位置前馈复合控制同样可以使用, 以减小梯形响应中稳态位置跟踪误差。两环系统应用到点对点运动控制的特定场合比较合适, 但因没有速度闭环调节功能, 系统应用到轨迹运动控制场合中有局限性。
Tracking performance of position servo system only with position and current loops
[J].位置闭环、速度闭环和电流闭环组成的三环结构, 是目前被普遍认同的位置伺服系统控制结构。然而在某些特定场合, 例如点对点运动控制场合中, 重点是要求系统位置响应的动态性能, 而对速度调节的性能要求并不高。这时, 速度闭环不仅没有发挥作用, 还作为控制结构中的串联环节, 降低了系统位置调节动态响应性能。针对这些特定的场合, 本文研究了全数字位置闭环和电流闭环组成的两环结构位置伺服系统, 并利用阶跃响应性能和梯形响应性能, 在相同命令信号和相同控制对象的条件下, 与三环系统作比较。仿真和实验结果显示, 两环系统的位置动态响应时间小于三环系统, 并且两环系统中位置前馈复合控制同样可以使用, 以减小梯形响应中稳态位置跟踪误差。两环系统应用到点对点运动控制的特定场合比较合适, 但因没有速度闭环调节功能, 系统应用到轨迹运动控制场合中有局限性。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}