

1 引言
随着电力电子技术的发展,电力电子装置在工业中的应用日趋广泛。不控整流器和相控整流器作为电源装置的输入级得到大量的使用,在方便地实现了AC-DC变换的同时,在电网侧引起大量谐波和无功电流,进而造成公共连接点PCC电压畸变,严重影响供电质量[1]。
对于无功补偿装置,比如由固定电容器组FC和晶闸管相控电抗器TCR组成的静态无功补偿器SVC,因价格便宜,已经在电网中得到了大量的应用。此外,还有基于DC-AC变换器的静止同步补偿器STATCOM,虽然能够提供动态无功补偿,但对于工业用户校正功率因数来讲成本较高[2]。
但是,FC在投入电网进行无功补偿时,为避免与电网发生低次谐波谐振,通常都会装设串联电抗器[9]。同样,由于D-CAP本质上就是可调电容器,也存在与FC类似的谐波谐振问题,必须进行详尽的分析并给出切实可行的解决方案。本文首先给出了Buck型D-CAP的基本电路拓扑及其工作原理,然后分析了D-CAP进行无功补偿时的基本控制方程、基本控制策略和谐波谐振抑制问题,以及D-CAP进行无功和谐波复合补偿时的偶次谐波调制方法、复合控制策略及其谐波谐振抑制问题,最后对D-CAP的无功、谐波复合控制策略和谐波谐振抑制问题进行了初步的Matlab/Simulink仿真验证。
2 D-CAP基本拓扑与工作原理
图1
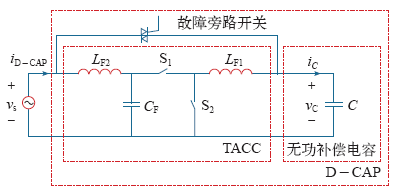
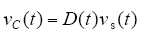
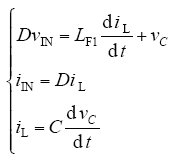
以图1所示的单相Buck型D-CAP为例,假定开关频率fSW足够高,在若干开关周期内电源电压都可视为常数,开关纹波电流可以忽略,开关S1的占空比为D(t),则无功补偿电容C上的电压vC(t)与PCC相电压vs(t)之间满足
而无功补偿电容电流iC(t)与D-CAP的输入电流iD-CAP(t)之间的关系为
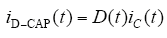
由于是双向开关,电感LF1不会断流,因此,式(1)和式(2)在任何占空比时均成立。另外,无功补偿电容C上的电压与电流之间存在以下基本关系式
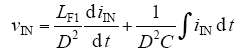
将式(1)和式(3)代入式(2)得到D-CAP输入电流
式(4)即为D-CAP的基本控制方程,可以通过实时适当调节占空比D(t)获得所需的D-CAP输入电流iD-CAP(t)。
3 D-CAP无功补偿控制策略及其谐振问题
静态无功补偿通常采用投切并联电容器的方法,只能对补偿的无功进行分段有级调节,且补偿的无功电流依赖于电源电压。而动态电容器可以对补偿的无功进行平滑无级调节,且可以采用合适的拓扑以适应不同的无功补偿要求。
3.1 D-CAP无功补偿控制方程
当占空比D(t) = D0恒为常数时,式(4)可以化简为
式(5)说明Buck型D-CAP的端口特性呈现为受占空比D0控制的可调电容器,其等效电容为

式(6)表明Buck型D-CAP的等效无功补偿电容只能在0~C之间变化,当占空比D0 = 1时获得最大的无功补偿电流。
3.2 D-CAP无功补偿控制策略
D-CAP的无功补偿经典控制框图如图2所示,具体的控制方法为:检测三相电网电流ia、ib、ic,然后进行从abc到dq的同步旋转坐标变换(其中d轴与电网A相相电压同相位),在获得q轴电流分量iq(即无功电流分量)后,使用PI调节器生成占空比指令D*,将D*与高频载波信号比较后生成的PWM驱动信号分别送入三相D-CAP的每一相模块中,从而改变等效补偿电容以实现动态无功补偿。
图2
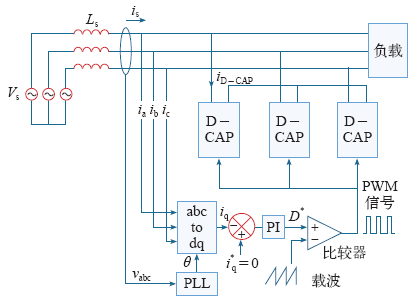
图2
三相D-CAP无功补偿控制框图
Fig. 2
Control block diagram of three-phase D-CAP for VAR compensation
D-CAP进行无功补偿时的基本工作原理如下:当电网电流中含有滞后无功分量时,q轴电流分量iq>0,PI调节器的输出增大,占空比指令D*增加,导致D-CAP的等效补偿电容增大,使补偿无功电流增加,从而使电网电流中含有的无功分量逐渐减少至0。
3.3 D-CAP无功补偿谐振问题
当占空比D恒定时,Buck型D-CAP的输入端口的电压电流关系(开关周期平均值)为
整理后得到
对应的单相等效电路如图3所示。
图3
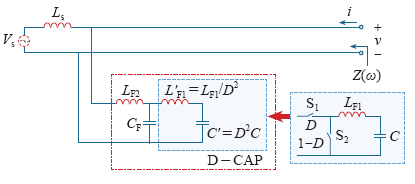
图3
D-CAP无功补偿时的单相等效电路
Fig. 3
Single-phase equivalent circuit of D-CAP for VAR compensation
从如图3所示的端口看进去的阻抗为Z(ω)为

Z(ω)表达式中分母为0时对应的ω为系统的并联谐振点,分子为0时对应的ω为系统的串联谐振点。若系统存在电流源型非线性负载,且负载电流中含有此并联谐振频率附近的谐波分量,则会激发高幅值的PCC谐波电压,同时电网电源侧和D-CAP也会出现高幅值的谐波电流;若系统存在电压源型非线性负载,且PCC电压中存在此串联谐振频率附近的谐波分量,则会激发高幅值的谐波电流,流经负载和D-CAP,可能引起装置的故障和损坏。
同时,还可以看到,系统的并/串联谐振点与等效电容C′有关。当系统的无功需求发生变化时,D-CAP的等效电容C′也会发生变化,从而改变并/串联谐振频率。因此,在图2中加入谐波谐振抑制环路,可以改变D-CAP在谐振点频率附近的等效电路以破坏系统谐振条件,解决因D-CAP而存在的谐波谐振问题。
4 D-CAP复合补偿控制策略及其谐振问题
D-CAP不仅能够进行动态无功补偿,如果采用偶次谐波调制(Even Harmonic Modulation,EHM)方式[2],也可以同时补偿系统中非线性负载产生的奇次谐波电流,具备无功和谐波的复合补偿功能。
4.1 D-CAP复合补偿EHM方式
对D-CAP来说,假定PCC相电压是纯正弦波vs(t) = Vmsin(ωt),占空比D(t)中除了常数项外还含有偶次谐波项,比如假设

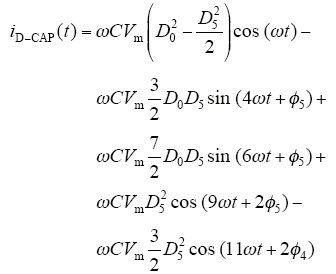
则由式(4)可得D-CAP的最终输入电流为
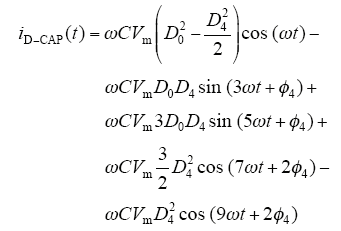
根据式(11)可以看到:D-CAP经过含有常数项和4次谐波分量的占空比调制后,输入电流中存在基波无功电流和3次、5次、7次、9次谐波电流,占空比中的常数项影响到了3次、5次的谐波输入电流,而占空比中的4次谐波项则影响到了所有次的谐波输入电流。
D-CAP在进行无功和谐波复合补偿时,通常基波无功电流占补偿电流的主要部分,在此条件下,观察式(11)中的3次、5次、7次、9次谐波电流幅值,注意到D0>>D4且D0和D4均小于1,得知3、5次谐波电流的幅值明显大于其余谐波的幅值,且5次谐波电流的幅值受D4的影响最大。
与之相反,如果调制比D(t)中除了常数项外仅含有奇次谐波项,比如假设

则由式(4)可得D-CAP的最终输入电流为
同理,根据式(13)可以看到:D-CAP经过含有常数项和5次谐波分量的占空比调制后,得到了基波无功电流和4、6、9、11次谐波电流,占空比中的常数项影响到了4、6次的谐波输入电流,而占空比中的5次谐波项则影响到了所有次的谐波输入电流。类似地,4、6次谐波电流的幅值明显大于其余谐波的幅值,且6次谐波电流的幅值受D5的影响最大。
因此,D-CAP进行谐波补偿的工作原理可以归纳为:在基波无功电流占补偿电流的主要部分的前提下,占空比D(t)中的N次谐波对于输出电流中的N - 1次谐波电流和N + 1次谐波电流产生主要影响,且对N + 1次谐波电流的影响最为显著。
考虑到实际电网中的典型特征谐波次数均为奇次,故可以在D-CAP的占空比指令中加入偶次谐波项来生成奇次谐波电流,实现无功和谐波的复合补偿。
4.2 D-CAP复合补偿控制策略
由上可知,在使用D-CAP实现谐波补偿时需要同时补偿基波无功电流,而且基波无功电流占补偿的主要成分,才能满足EHM中的N - 1次谐波对于输出谐波电流中的N次谐波产生主要影响这一简化控制的前提条件,因此D-CAP应设计为复合补偿装置才能最大限度地发挥其补偿效果。
图4给出了基于多同步旋转坐标系(Synchronous Reference Frame,SRF)变换的D-CAP复合补偿控制框图。控制环路主要分为两个部分:①基波无功电流补偿;②谐波电流补偿。其中,每次谐波电流都有一个环路进行调节。此控制策略非常类似于基于SRF的传统并联型APF控制,其最大的不同之处在于N次谐波电流在变换到相应的SRF中经过PI调节之后形成的控制量不是再变换回abc静止坐标系参与形成调制波,而是通过正序N - 1次同步坐标系向静止坐标系的转换矩阵变换成EHM中的N - 1次谐波分量来主要控制输出的第N次谐波电流。
图4
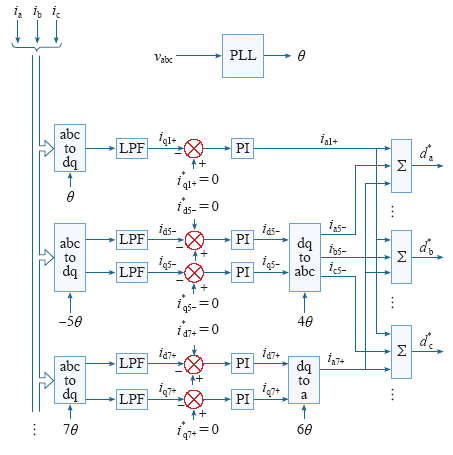
图4
三相D-CAP复合补偿控制框图
Fig. 4
Control block diagram of three-phase D-CAP for VAR and harmonic integrated compensation
需要强调的是,EHM占空比指令中的偶次谐波与D-CAP的奇次谐波输入电流并没有一一对应的关系,比如D-CAP输出的5次谐波电流主要受EHM占空比指令中的4次谐波和6次谐波控制,其中受4次谐波影响更为显著。EHM占空比指令中的各次谐波与D-CAP输入电流中的各次谐波之间具有很强的耦合关系,无法像传统并联型APF那样简单地将各次谐波电流直接分开到各个相互不耦合的环路进行控制[10],这将给D-CAP的复合控制设计带来一定的困难。同时,EHM占空比指令还有必须始终保持在有效数值范围[0,1]内的限制,即理论上D-CAP能发出的某次谐波电流的大小也不是任意的,其受占空比指令中偶次谐波幅值的限制。
4.3 D-CAP复合补偿谐振问题
与D-CAP仅仅进行无功补偿相比,D-CAP复合补偿时的谐振问题将更加复杂。为简化分析,采用如图5所示的D-CAP单相谐波等效电路,并假设PCC点电压无畸变,当D-CAP的谐波补偿控制环路未工作时,有iD-CAPh = 0,电路中谐波电流的分配如下
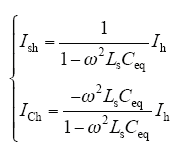
图5
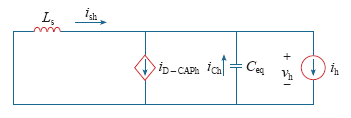
图5
D-CAP复合补偿单相谐波等效电路
Fig. 5
Harmonic equivalent circuit of single-phase D-CAP for VAR and harmonic compensation
可以看到:在负载谐波电流ih频率大于系统谐振频率时,网侧的谐波电流与负载谐波电流是反相的,若在谐波补偿控制中不能识别出此差异,则会导致谐波补偿控制环路由负反馈变成正反馈,引起很大的谐波电流。此时若能改变所有高于系统谐振频率的网侧谐波电流检测指令极性,就可以维持负反馈控制,抑制系统谐振。
5 仿真分析
5.1 系统参数
图6
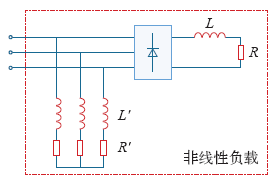
表1 三相Buck型D-CAP系统参数
Tab. 1
| 参 数 | 数 值 | ||
|---|---|---|---|
| 电源 | 电网电压Vs/V | 380 | |
| 电网频率f/Hz | 50 | ||
| 电网等效电感Ls/μH | 239 | ||
| 非线性负载 | 不控整流桥直流侧电感L/mH | 80 | |
| 不控整流桥直流侧电阻R/Ω | 24 | ||
| 三相平衡感性负载电感L′/mH | 9.6 | ||
| 三相平衡感性负载电阻R′/Ω | 1 | ||
| D-CAP | 硬 件 参 数 | 无功补偿电容C/μF | 900 |
| 滤波电感LF1/μH | 12.5 | ||
| 输入滤波电容CF/μF | 121 | ||
| 输入滤波电感LF2/μH | 55.2 | ||
| 控 制 参 数 | 开关频率fSW/kHz | 16.5 | |
| PI系数[kq1_P,kq1_I] | [0,–1] | ||
| PI系数[kd5_P,kq5_P,kd5_I,kq5_I] | [0,0,0.3,–0.3] | ||
| PI系数[kd7_P,kq7_P,kd7_I,kq7_I] | [0,0,–0.1,–0.1] | ||
| PI系数[kd11_P,kq11_P,kd11_I,kq11_I] | [0,0,0.3,0.3] | ||
| PI系数[kd13_P,kq13_P,kd13_I,kq13_I] | [0,0,–0.1,–0.1] | ||
| 二阶LPF截止频率/Hz | 50 | ||
5.2 D-CAP不运行
图7
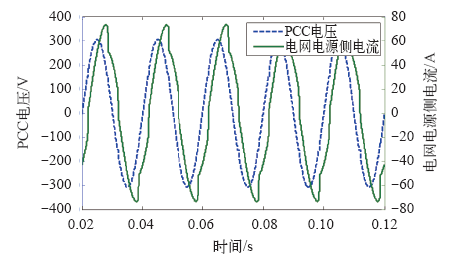
表2 各种模式下三相Buck型D-CAP谐波分析(A相)
Tab. 2
| 谐波次数 | 无D-CAP | 无功补偿 | 复合补偿 | 谐振抑制复合补偿 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 网侧电流 幅值/A | PCC电压 (%) | 负载电流 幅值/A | 网侧电流 幅值/A | PCC电压 (%) | 负载电流 幅值/A | 网侧电流 幅值/A | PCC电压 (%) | 负载电流 幅值/A | 网侧电流 幅值/A | PCC电压 (%) | |
| 基波 | 69.64 | 100 | 70.04 | 54.69 | 100 | 68.34 | 55.31 | 100 | 69.61 | 54.73 | 100 |
| 5 | 4.60 | 0.54 | 4.64 | 6.45 | 0.75 | 2.93 | 0.16 | 0.22 | 4.72 | 0.00 | 0.00 |
| 7 | 3.16 | 0.52 | 3.17 | 8.06 | 1.32 | 2.23 | 0.30 | 0.24 | 3.33 | 0.00 | 0.00 |
| 11 | 2.00 | 0.52 | 2.13 | 1.94 | 0.50 | 4.47 | 117.53 | 30.35 | 2.12 | 0.00 | 0.00 |
| 13 | 1.65 | 0.50 | 1.77 | 0.58 | 0.18 | 2.70 | 39.70 | 11.83 | 1.79 | 0.00 | 0.00 |
5.3 D-CAP无功补偿
当D-CAP只运行于无功补偿模式,仅基波无功电流补偿环路起作用时的各种仿真波形如图8所示。
图8
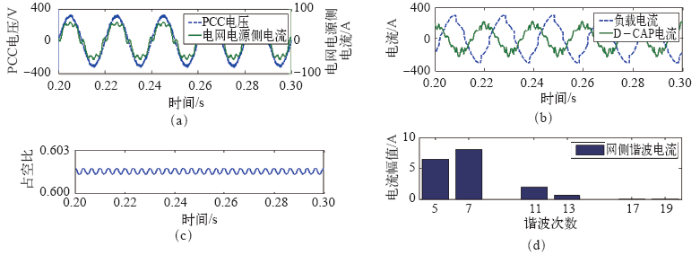
图8
三相Buck型D-CAP无功补偿仿真结果
Fig. 8
Simulation results of three-phase Buck-type D-CAP for VAR compensation
从图8a可以看出,D-CAP可以将网侧电流补偿到与PCC电压同相位,实现基波功率因数校正的功能。
但是在存在电网阻抗的情况下,PCC点电压会由于谐波电流而发生畸变,而畸变的电压会在D-CAP上产生额外的谐波电流,会导致补偿无功电流发生畸变,影响补偿的效果。见表2,7次谐波电流在补偿前是3.17A,补偿后就变成了8.06A。根据3.3节的分析,得出在占空比为0.6时的并联谐振频率为8.3倍的基波频率,在谐波次数在8.3附近的谐波电流会被放大,这也就是7次谐波电流在D-CAP补偿无功后反而增大的原因。
5.4 D-CAP复合补偿
图9
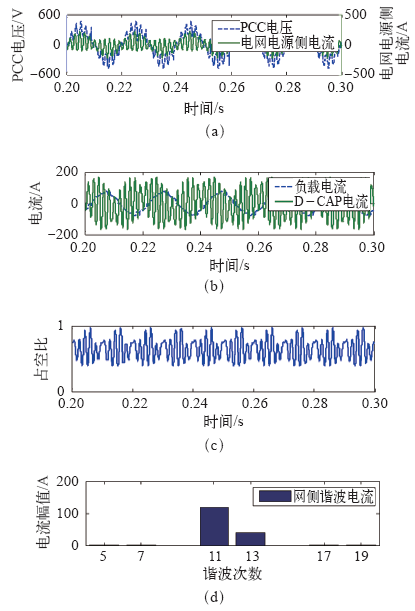
图9
三相Buck型D-CAP复合补偿仿真结果
Fig. 9
Simulation results of three-phase Buck-type D-CAP for integrated compensation
这是因为在谐波次数高于8.3的11次、13次谐波补偿环路中,由于网侧的谐波电流与负载谐波电流实际上是反相的,导致11次、13次谐波补偿由负反馈变成了正反馈,引起11次、13次谐波谐振放大,这可以通过改变网侧11次、13谐波电流检测指令的极性进行谐振抑制。
图10
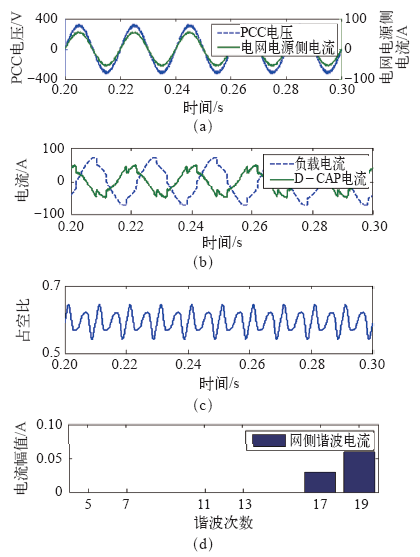
图10
三相Buck型D-CAP谐振抑制复合补偿仿真结果
Fig. 10
Simulation results of three-phase Buck-type D-CAP with resonance suppression for integrated compensation
6 结论
本文以三相Buck型D-CAP为研究对象,分析了其基本拓扑、控制关系、无功和复合控制策略以及相关的谐振问题,得到了如下结论:
(1)D-CAP可以在现有无功补偿电容器的基础上加装TACC改造而得,能够同时补偿基波无功和谐波电流,是一种性价比较高的工业电能质量治理装置。
(2)D-CAP由于EHM方式生成基波无功和谐波电流的固有耦合性,使得其在无功和谐波独立控制的实现上较为困难。
(3)D-CAP可能引入系统谐振,导致谐波放大,电力系统容量越小,等效电源阻抗越大,则系统谐振频率越低,无功和谐波的复合补偿越难,但可以通过改变部分谐波检测指令的极性进行谐振抑制,同时完成复合补偿目标。
因此,只有找到自动识别系统谐振频率的方法才能有效发挥D-CAP的复合补偿功能。在无法识别谐振的情况下,在控制环路中引入PCC电压,对谐振谐波频段引入阻尼控制[11]也是一种较为可行的方案,这也是今后的一个研究重点。
参考文献
Dynamic Capacitor (D-CAP): an integrated approach to reactive and harmonic compensation
[J].DOI:10.1109/TIA.2010.2072974 URL [本文引用: 4]
Trends in active power line conditioners
[J].DOI:10.1109/TPEL.63 URL [本文引用: 1]
A novel AC-AC shunt active power filter without large energy storage elements
[C].
Dynamic VAR/harmonic compensation with inverter-less active filters
[C].
Thin AC converters-a new approach to making grid assets smart and controllable
[C].
Dynamic capacitor-VAR and harmonic compensation without inverters
[C].
Inverter-less STATCOMs
[C].
无功补偿电容器组串联电抗器的参数匹配
[J].
Parameter matching of series reactor in reactive compensation capacitor bank
[J].
多同步旋转坐标系下指定次谐波电流控制
[J].
为提高有源电力滤波器(active power filter,APF)的补偿性能和动态响应,提出一种基于多同步旋转坐标的谐波电流控制策略,采用通过与某指定次正序或负序谐波角速度同步的旋转坐标变换,将该指定次谐波变为直流量,实现指定次谐波的检测和PI控制,从而实现对某指定次谐波电流的无静差补偿。完整的谐波电流控制器由多个独立不同角速度的谐波电流控制器叠加组成。建立了APF在谐波旋转坐标系下的数学模型,提出一种简单的电流耦合解耦策略。对指定次谐波电流控制器进行分析,从理论上证明了与传统的电流环控制方法相比,指定次谐波控制可提高补偿精度,并利用零极点对消方法对控制器参数进行了设计。实验结果验证了所提控制策略的优越性。
Selective harmonic current control based on multiple synchronous rotating coordinates
[J].为提高有源电力滤波器(active power filter,APF)的补偿性能和动态响应,提出一种基于多同步旋转坐标的谐波电流控制策略,采用通过与某指定次正序或负序谐波角速度同步的旋转坐标变换,将该指定次谐波变为直流量,实现指定次谐波的检测和PI控制,从而实现对某指定次谐波电流的无静差补偿。完整的谐波电流控制器由多个独立不同角速度的谐波电流控制器叠加组成。建立了APF在谐波旋转坐标系下的数学模型,提出一种简单的电流耦合解耦策略。对指定次谐波电流控制器进行分析,从理论上证明了与传统的电流环控制方法相比,指定次谐波控制可提高补偿精度,并利用零极点对消方法对控制器参数进行了设计。实验结果验证了所提控制策略的优越性。
一种用于配电系统谐振抑制及谐波治理的新型PAPF控制方法
[J].针对配电系统中时有发生的并联电容器与电网阻抗之间谐振的现象,该文首先分析了传统的负载电流检测方式下并联型有源电力滤波器(parallel active power filter,PAPF)对系统谐振的抑制情况。分析表明,由于无功补偿电容器的影响,传统控制策略下的PAPF对系统谐振的抑制效果不理想,同时当检测的负载电流中包括无功补偿电容器电流时,系统还有可能出现不稳定的现象。针对这种情况该文提出了一种新的PAPF控制策略,该控制策略可以在进行谐波治理的同时有效抑制负载谐波电流或者系统谐波电压造成的并联电容器与电网阻抗之间的谐振。最后给出了实验验证结果。
A novel control method of PAPF for resonance damping and harmonics compensation in power system
[J].针对配电系统中时有发生的并联电容器与电网阻抗之间谐振的现象,该文首先分析了传统的负载电流检测方式下并联型有源电力滤波器(parallel active power filter,PAPF)对系统谐振的抑制情况。分析表明,由于无功补偿电容器的影响,传统控制策略下的PAPF对系统谐振的抑制效果不理想,同时当检测的负载电流中包括无功补偿电容器电流时,系统还有可能出现不稳定的现象。针对这种情况该文提出了一种新的PAPF控制策略,该控制策略可以在进行谐波治理的同时有效抑制负载谐波电流或者系统谐波电压造成的并联电容器与电网阻抗之间的谐振。最后给出了实验验证结果。

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}