


1 引言
纵联差动保护是变压器的主保护之一,具有简单可靠、灵敏度高和速动性好等优点。但在实际运行中,由于励磁涌流、电流互感器饱和以及系统运行方式等影响,差动保护远远不能满足变压器安全可靠运行的要求[1]。例如,当区外故障时,由于电流互感器可能发生饱和以及非周期分量因素的影响,差动电流可能达到设定值,而制动电流较小,导致差动保护误动;当区内故障时,如轻微匝间故障或者高阻抗接地故障时,其故障电流较小,导致差动保护拒动。
因此,本文提出了一种模糊自适应纵联差动保护判据。当发生区内故障时,模糊逻辑自动减小制动系数,提高区内故障时保护的灵敏性;当发生区外故障时,模糊逻辑自动增大制动系数,提高保护的可靠性。最后,通过Matlab对具体系统的仿真,结果表明模糊自适应纵联差动保护比传统纵联差动保护更具优势。
2 纵联差动保护原理
以双绕组为例进行说明,流入差动继电器的电流为两侧电流互感器二次电流相量和,即 
为了减小保护内不平衡电流的影响,引入具有制动作用的纵联差动保护。利用外部故障时的短路电流来实现制动,使继电器的动作电流随制动电流的增加而增加[3]。具有制动特性继电器的动作方程为Id>KrelIres,其中Krel为可靠系数。在数字化差动保护中,常采用两折线特性,但容易导致区外故障被切除时保护误动,其制动特性数学表达式为
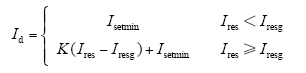
式中,Isetmin为最小动作电流;Iresg为拐点电流,一般取(0.6~1.1)IN;K为制动斜率,且 
3 励磁涌流的鉴别
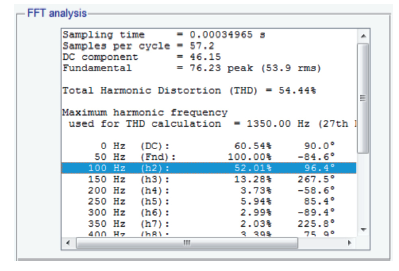
空载投入变压器或者区外故障切除电压恢复后,可能出现数值很大的励磁涌流。励磁涌流中存在大量的高次谐波,主要以2次谐波为主[4]。可靠判断励磁涌流存在的判据可以以差动电流中2次谐波分量的含量为依据,即
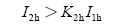
式中,I2h为2次谐波分量;I1h为基波分量;K2h为2次谐波含量,K2h = 15%〜20%。为了防止产生励磁涌流时差动保护误动,若2次谐波含量超过K2h,差动保护将被闭锁。为了加快严重内部故障时差动保护的动作速度,需另外配合一组差动电流速断保护。
4 模糊自适应纵联差动保护
4.1 模糊自适应差动保护判据
为实现差动保护在区内故障时灵敏、可靠、快速动作,而在区外故障时安全不误动。本文提出了一种模糊自适应纵联差动保护[5],其保护判据为

式中,Id为动作电流;K1 + K2Q(R)为差动保护自适应制动系数;其中K1为基础制动系数,K2为偏移制动系数,Q(R)为根据模糊逻辑自动调节的控制因子,且Q(R)∈[-1.5,1.5]。
4.2 判据实现
系统故障算例设置如图2所示,三相双绕组变压器连接两侧无穷大系统,分别设置区外故障和区内故障。
图2
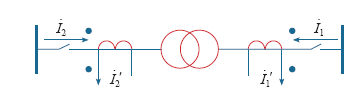
当发生区外故障时,则有
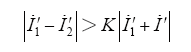
即
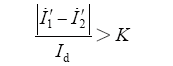
式中,K为比例系数, 
4.3 模糊算法
图3
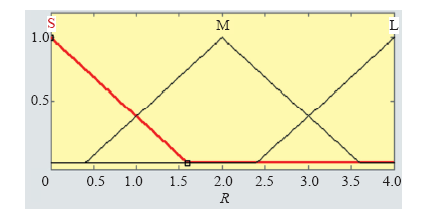
图4
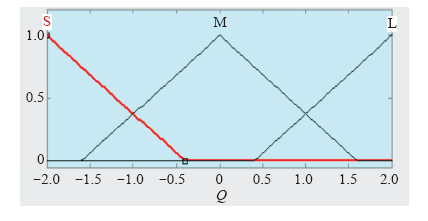
建立的模糊规则如下表所示。根据输入、输出变量R、Q建立的隶属度函数以及模糊规则,可以形成如图5所示的模糊控制曲线。
图5
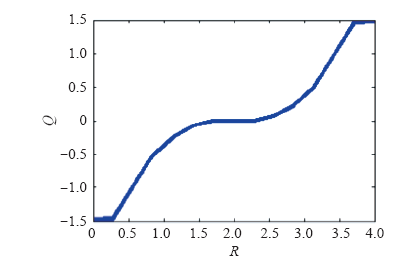
由图5可知,根据R的数值变化,控制因子Q可以动态地非线性实行控制,当外部故障时,R值较大,控制因子Q为较大的正值,因此有较大的制动系数,导致动作电流增大,防止区外故障误动。同理,当发生区内故障时,R值较小,控制因子Q为较大负值,因此制动系数较小,导致动作电流减小,区内故障时增加了保护动作的灵敏性。
5 故障算例仿真及分析
5.1 Simulink模块搭建
图6
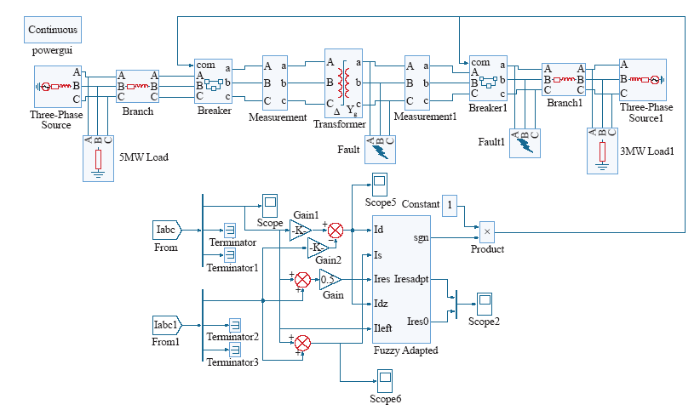
图7
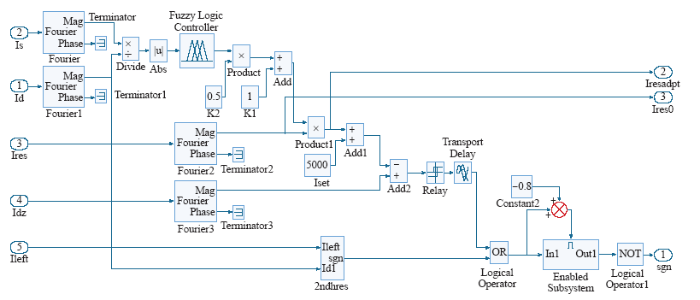
图8
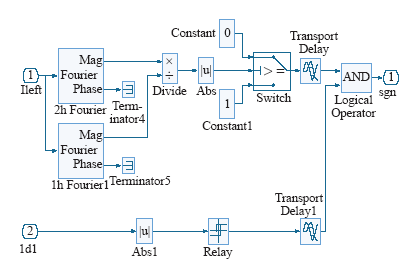
图9
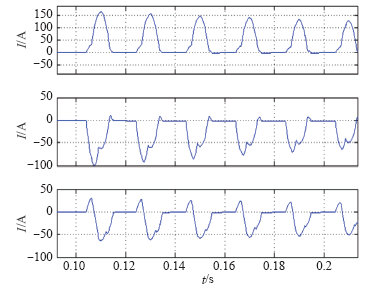
图10
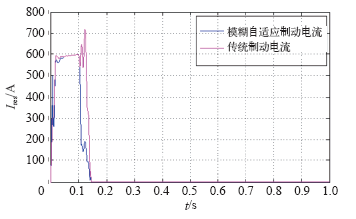
5.2 结果分析
图11
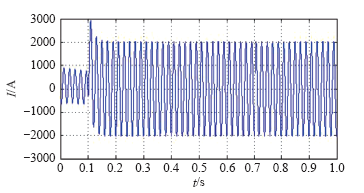
图12
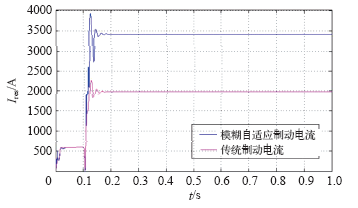
图13
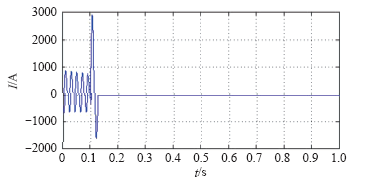
图14
6 结束语
为提高纵联差动的性能,在传统纵联差动保护基础上提出了模糊自适应纵联差动保护,引入了控制因子,根据模糊逻辑使控制因子能自适应地调节,使得保护在区外故障时更加可靠地不误动,在区内故障时保护动作更具灵敏性,仿真结果表明本文所提模糊自适应纵联差动保护比传统纵联差动保护更具优势。
参考文献
自适应变压器电流差动保护判据研究
[J].DOI:10.7667/j.issn.1674-3415.2010.18.023 URL [本文引用: 1]
The research of the adaptive transformer current differential protection criterion
[J].DOI:10.7667/j.issn.1674-3415.2010.18.023 URL [本文引用: 1]
人工智能与模糊控制在电力系统继电保护应用的研究现状及前景
[J].
Present situation and developing prospect of artificial intelligence and fuzzy control in power system protection relay
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}