1 引言
随着经济发展社会用电量不断提升,电网安全稳定运行的重要性正日益凸显。变电站作为电网枢纽,对其站内继电保护设备的定期巡检是保障电网运行安全的有效手段[1 ] 。保护压板状态校核是巡检工作的重要组成部分,现阶段往往采用传统的人工方式实现,即一人持压板卡读取双重名称及投退状态,另一人复诵核对。该方法存在劳动力成本高、效率低的缺点,而且常因视觉疲劳、精神懈怠等原因导致错核、漏核,从而限制了巡检质量,甚至导致二次回路出现安全隐患。由于近年来大量新变电站、新设备的投入运行,站内继电保护压板数量日益增多,压板状态校核的工作量进一步加大,人工方法导致压板投退错误从而引起保护不正确动作的风险也随之成倍增大。此背景下,亟需一种针对保护压板状态校核的智能化解决方案以辅助现有人工模式,提高校核效率。
实现压板状态校核的关键是对其投退状态进行有效识别。目前,依托于具有图像采集功能的变电站室内智能巡检机器人[2 -3 ] 等硬件平台,工程实践中希望基于屏柜图像对压板状态实现精确识别。当前图像识别方法主要分为两类:① 基于传统图像形态特征进行辨识,文献[4 ⇓ -6 ]在图像分割的基础上,构造压板在不同状态下的差异化特征,如方向角、重心坐标等,再基于形态特征构造判别指标以实现状态辨识;② 基于深度学习算法进行辨识,文献[7 -8 ]基于SSD模型提取多层图像特征,通过不断调参并采用正则化处理提高准确度和泛化能力;文献[9 ]采用Faster-RCNN网络构建压板检测模型,再通过Softmax结构进行投退状态二分类。
上述研究中,基于图像形态特征的辨识方法较依赖于对压板图像和背景图像进行分割的质量,在背景复杂时其辨识准确率低于深度学习方法。而在基于深度学习模型的研究中则较少计及屏柜玻璃光反射对识别效果的影响。同时上述研究普遍将重点放在了对压板状态的识别上,而未考虑到在工程应用中,智能巡检机器人只有同时识别出压板状态与对应双重名称,并将其形成映射时状态校核才有实际意义。
为此,本文提出一种改进YOLOX的继电保护压板状态校核方法。所提方法将注意力机制应用到对YOLOX网络结构的改进,以提高模型对压板状态的关注度,并对识别结果中压板标签边界框区域进行倾斜角矫正,构建专业语料库提升文本识别质量,获得压板状态和双重名称的映射关系以实现校核。最后,以实际的变电站内图像数据作为训练和测试集验证所提方法的效果。
2 YOLOX网络结构
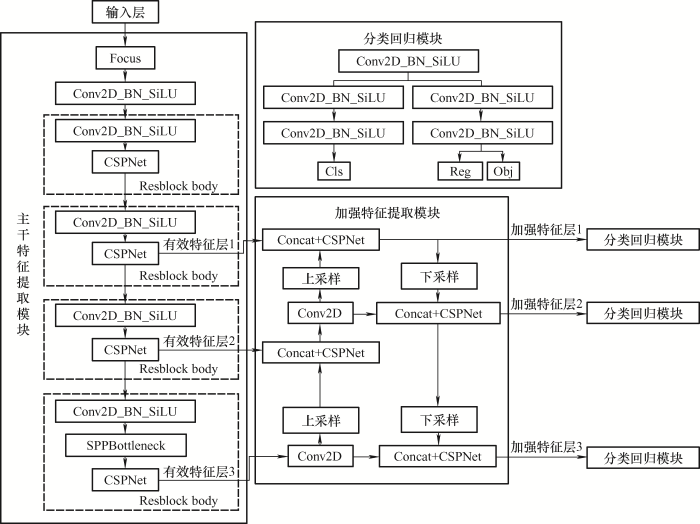
YOLO模型多被应用于目标检测[10 ] ,作为该系列模型中的最新版本,YOLOX采用了Mosaic数据增强、SimOTA动态匹配正样本等改进手段[11 ] ,具有特征提取能力强、计算性能高、易于部署的优势,但同时也存在检测性能易受环境复杂度影响的不足。YOLOX模型的基本结构如图1 所示,其整体由4个部分构成,分别是输入层、主干特征提取模块CSPDarknet、加强特征提取模块FPN以及分类回归模块YOLO Head。
图1
2.1 主干特征提取模块CSPDarknet
数据输入经Focus模块[11 ] 进行通道调整,再依次经过4个Resblock Body模块。在每个Resblock Body模块中通过CSPNet结构进行特征提取[12 -13 ] 。使用主干特征提取模块最终会获得3个有效特征层,自下而上分别记为有效特征层3、有效特征层2和有效特征层1,其分别是输入图片压缩3~5次的结果,后续将作为加强主干特征网络的输入。
2.2 加强特征提取模块FPN
加强特征提取模块先后通过两次上采样与下采样对上层模块输出的三层不同维度的特征进行融合,如图1 所示。通过该过程,输入的3个有效特征层相互融合,以加强特征层1、加强特征层2和加强特征层3的形式分别作为输出至分类回归模块。
2.3 分类回归模块YOLO Head
YOLOX对分类回归部分进行了改进,采用了分支解耦的思想分别实现分类和回归,最后预测的时候才整合在一起。由图1 可见,对于每一个输入的加强特征层,最终获得三个检测结果,分别是Reg、Obj和Cls。其中Reg用于表征特征点的坐标预测回归值,其通道数为4,表征了边界框;Obj用于表征特征点有无检测目标,其通道数为1;Cls用于表征特征点所属检测目标的类别,其通道数为待检测的目标类别数。模型根据分类回归模块输出的预测值${{p}_{j}}$ ${{g}_{i}}$ ${{c}_{ij}}$
(1) ${{c}_{ij}}=L_{ij}^{cls}+\lambda L_{ij}^{reg}$
式中,$L_{ij}^{cls}$ $L_{ij}^{reg}$ ${{g}_{i}}$ ${{p}_{j}}$ $\lambda $
(2) $L_{ij}^{reg}=-\lg [IoU({{\text{B}}_{gi}},{{\text{B}}_{pj}})]$
式中,${{\text{B}}_{gi}}$ ${{\text{B}}_{pj}}$ $IoU(\cdot )$
(3) $L_{ij}^{cls}=-\sum\limits_{k=1}^{N}{[P_{gi}^{k}\lg (}P_{pj}^{k})+(1-P_{gi}^{k})\lg (1-P_{pj}^{k})]$
式中,$N$ $P_{gi}^{k}$ $P_{gi}^{k}$ $k$
3 基于改进YOLOX的压板状态校核方法
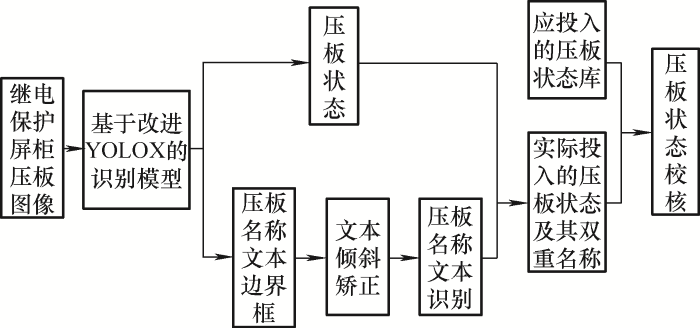
压板状态校核需要继电保护屏上所有压板的状态及其对应的双重名称,以形成映射关系。因此需要识别每一个压板的状态及其标签,并对标签所在区域进行文本识别。
3.1 基于注意力机制的改进YOLOX模型
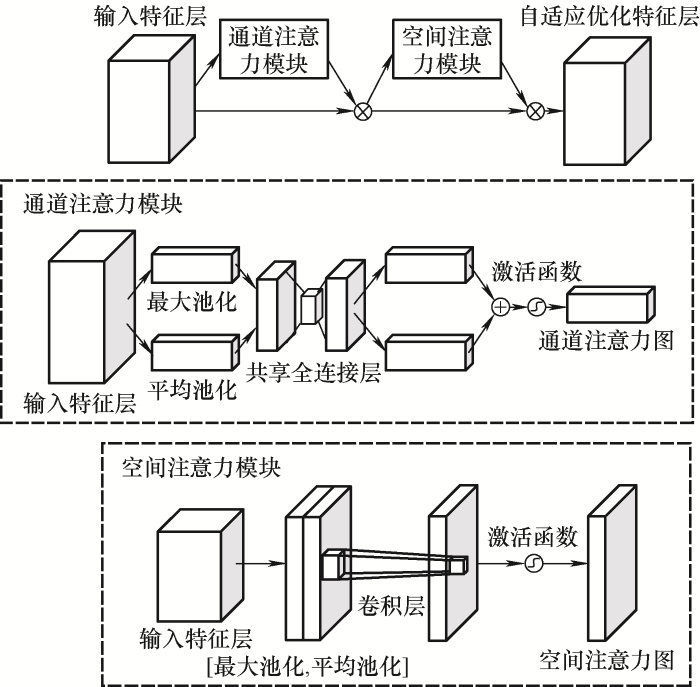
由于运行保护屏柜处于被锁住的状态,在不同的光照条件下,透过保护屏玻璃采集到的压板图像会受到不同强度的光反射干扰,而这不利于模型的识别效果。CBAM卷积注意力模块能够增强复杂背景下待识别目标的特征表达能力[14 ] ,因此可以通过引入该模块提升反射光干扰下的模型鲁棒性。CBAM卷积注意力模块的结构如图2 所示。
图2
如图2 所示,CBAM卷积注意力模块由通道注意力模块和空间注意力模块构成[15 ] 。对于输入的特征层,注意力机制会分别沿着独立的通道维度和空间维度依次推断注意力图,然后将注意力图与输入特征图相乘以进行自适应特征优化[16 ] ,从而增强重要信息、过滤无用信息。
在通道注意力模块中,输入特征层在空间维度上分别通过最大值池化与平均值池化进行维度压缩,此后经共享全连接层相加后再经激活函数后得到通道注意力特征图。
在空间注意力模块中,首先在通道维度上对输入特征层进行最大值池化和平均值池化,然后将两个结果基于通道做堆叠操作。此后通过卷积操作降维为单通道,再经过激活函数生成空间注意力特征图。
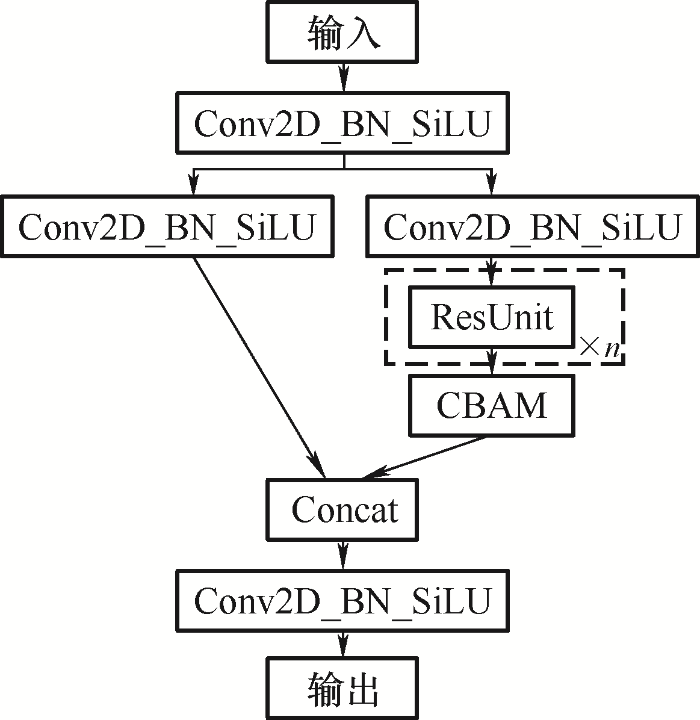
鉴于YOLOX模型在主干特征提取模块中通过CSPNet结构进行特征提取,考虑在输出三个有效特征层前的CSPNet结构中嵌入CBAM模块。改进后的CSPNet结构如图3 所示。
图3
由图3 可知,改进CSPNet结构中,经卷积标准化模块后部分输入经过n 个堆叠的残差卷积块接入CBAM模块,而剩余输入部分作为残差边直接与CBAM的输出相堆叠,再经过卷积标准化模块后获得输出,继而输入后续模型结构。
3.2 文本倾斜角矫正
通过图像识别模型,可以获得标定压板状态、压板双重名称标签坐标的边界框。考虑到YOLOX模型的输出结果仅能使用矩形边界框进行位置描述,而在实际应用中由于图像采集视角的存在,会造成边界框与文字的倾斜角误差,降低文本识别准确率,可采用透视变换对边界框内的文本进行倾斜角矫正。
通过透视变换可以将边界框标定的倾斜文本图像投影至新平面为
(4) $\left[ \begin{matrix} {\hat{x}} \\ {\hat{y}} \\ {\hat{z}} \\\end{matrix} \right]=\text{M}\times \left[ \begin{matrix} x \\ y \\ z \\\end{matrix} \right]$
式中,$(x,y,z)$ $(\hat{x},\hat{y},\hat{z})$ M
(5) $\text{M}=\left[ \begin{matrix} {{m}_{11}} & {{m}_{12}} & {{m}_{13}} \\ {{m}_{21}} & {{m}_{22}} & {{m}_{23}} \\ {{m}_{31}} & {{m}_{32}} & {{m}_{33}} \\\end{matrix} \right]$
(6) $\left\{ \begin{matrix} x=\frac{{\hat{x}}}{{\hat{z}}}=\frac{{{m}_{11}}x+{{m}_{12}}y+{{m}_{13}}}{{{m}_{31}}x+{{m}_{32}}y+{{m}_{33}}}=\frac{{{k}_{11}}x+{{k}_{12}}y+{{k}_{13}}}{{{k}_{31}}x+{{k}_{32}}y+1} \\ y=\frac{{\hat{y}}}{{\hat{z}}}=\frac{{{m}_{21}}x+{{m}_{22}}y+{{m}_{23}}}{{{m}_{31}}x+{{m}_{32}}y+{{m}_{33}}}=\frac{{{k}_{21}}x+{{k}_{22}}y+{{k}_{23}}}{{{k}_{31}}x+{{k}_{32}}y+1} \\\end{matrix} \right.$
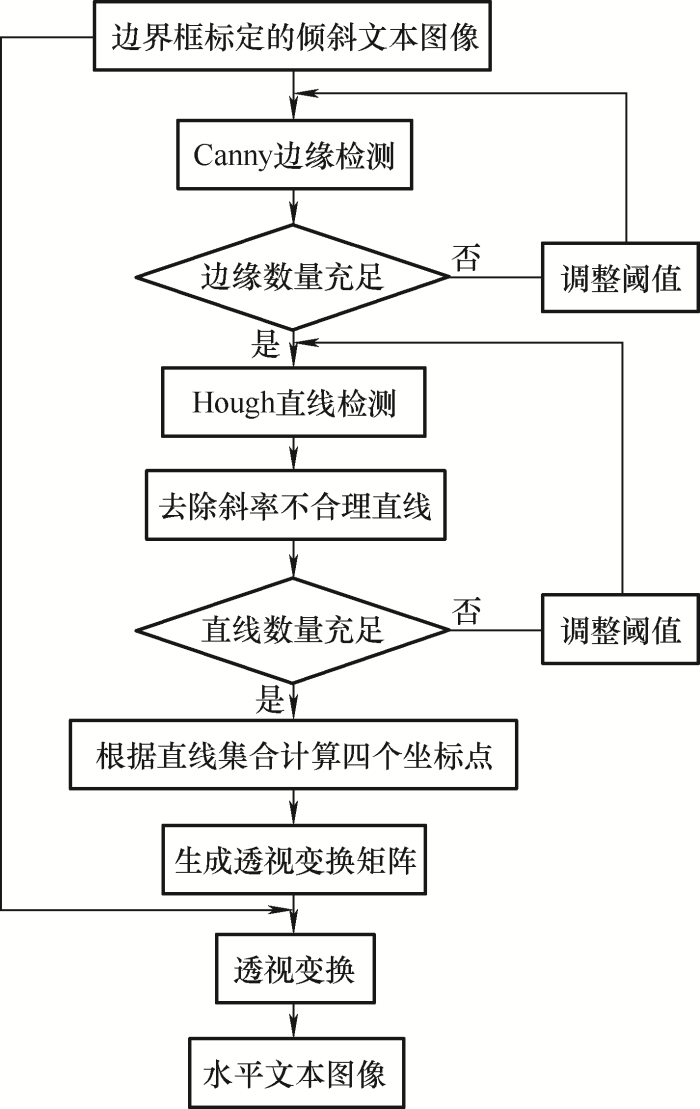
由式(6)可知,获得8个参数的值即能确定透视变换矩阵。由于经透视变换后希望获得水平的文本图像,因此需要在倾斜文本图像中获得4个点的坐标,且这些点所围成区域的边应与倾斜文本平行。鉴于标签颜色与背板背景色存在明显差异,且边缘保持水平,可以基于Canny边缘检测[17 ] 和Hough直线检测[18 ] 确定平行边,进而求解坐标,最后获得透视变换矩阵的参数,其流程如图4 所示。
图4
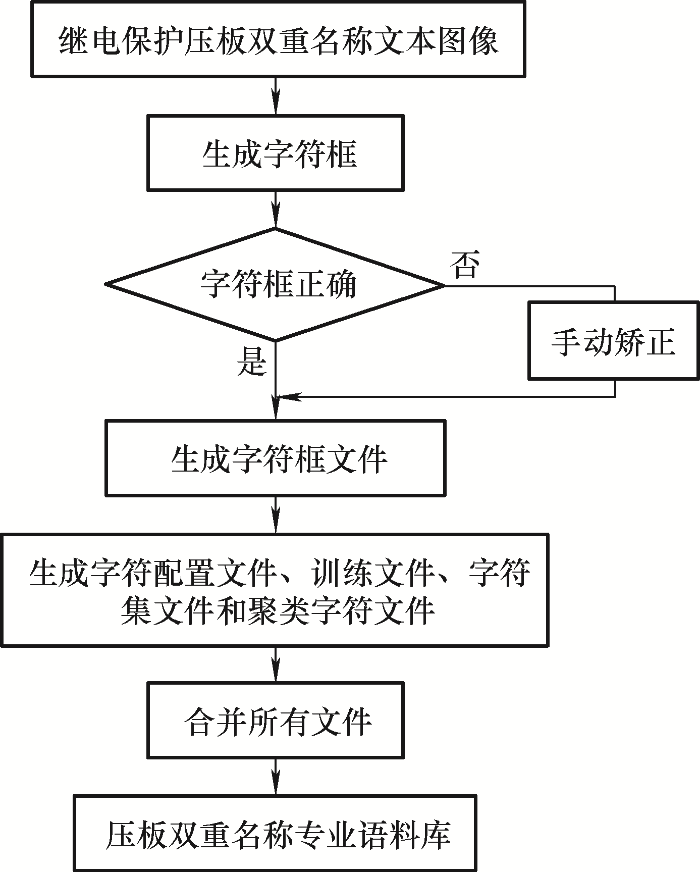
3.3 基于Tesseract5.0的继电保护压板名称识别
Tesseract5.0是支持多种语言文字检测的开源光学字符识别引擎[19 ] ,考虑到压板名称一般由专业术语组成,可以基于专业术语构建语料库(图5 ),有针对性地训练文字识别引擎,以提高文本识别的准确率。
图5
在获得压板状态及其双重名称后,与应投入的压板状态库进行比对实现状态校核,完整的状态校核流程如图6 所示。
图6
4 实际算例
4.1 数据集及评价指标
采集某500 kV变电站内某继电保护小室的压板图像共计500张,对其进行标注,并应用数据增强手段将图像数量扩充至2 500后作为数据集。数据集包含了某500 kV线变串对应的全部保护屏柜内不同颜色、不同状态的压板及其双重名称标签。以8∶1∶1的比例将数据集划分为训练集、验证集和测试集,待识别的目标共计四类,分别标注为投入的压板(on)、退出的压板(off)、备用的压板(standby)以及压板名称标签(name)。
算例所采用的评价指标应面向压板状态识别和压板标签文字识别两部分。针对压板状态识别采用的评价指标为平均准确度AP和平均准确度均值mAP,其计算方法如式(7)、(8)所示
(7) $AP=\int_{0}^{1}{P(R)dR}$
(8) $mAP=\frac{1}{n}\sum\limits_{i=1}^{n}{\mathrm{AP}(i)}$
式中,n 表示待识别的目标类数;$AP$ R 下精确率$P$ $R$ $P$
(9) $P=\frac{\mathrm{TP}}{\mathrm{TP+FP}}\times 100%$
(10) $R=\frac{\mathrm{TP}}{\mathrm{TP+FN}}\times 100%$
式中,对于某一类别待识别的目标而言,TP表示与真实边界框交并比IoU大于设定置信值的预测边界框的数量;FP表示与真实边界框交并比IoU小于设定置信值的预测边界框的数量;而FN表示没有被检测到的真实边界框的数量。
针对压板标签文字识别的评价指标为准确率Acc,其计算方式为
(11) $Acc=\frac{N}{{{N}_{C}}}\times 100%$
式中,N 是被正确识别的字符数;${{N}_{C}}$
由于在实际应用中,模型需要部署在移动设备(如室内巡检机器人)上,所以模型的大小和运行速度也是不可忽视的[20 ] 。评价模型大小可以使用模型文件占用字节数;评价运行速度可以采用每秒检测数(Frames per second,FPS)作为指标。
4.2 模型训练过程
模型训练平台采用配置为Core(TM)i7-8700 CPU处理器、NVIDIA RTX 3060型GPU以及CUDA11.0 GPU加速库。
模型训练在引用预训练权重的基础上分为两个阶段,第一阶段冻结主干特征提取模块,此时CSPDarknet参数不变仅对其余部分参数进行微调,占用显存较小;第二阶段解冻,此时整个网络的参数均发生调整,占用显存较大。两训练阶段为防止过拟合都采用了早停的训练技巧,两阶段参数设置如表1 所示。
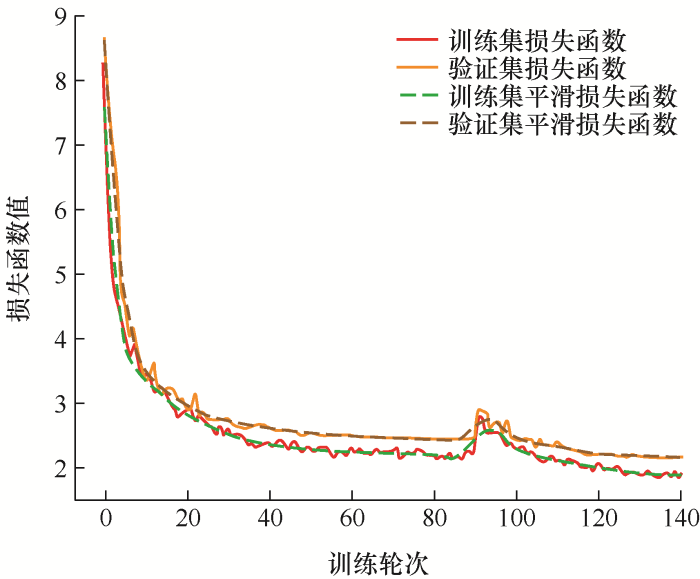
图7 展示了模型在训练阶段基于训练集和验证集的损失函数变化过程。
图7
由图7 可知,在冻结阶段模型于第90个训练轮次处提前停止,在随后的解冻阶段,损失函数发生一个较小的突增继而缓慢降低趋于收敛,于第155个训练轮次处提前停止。在整个过程中,验证集与训练集损失函数具有相似的收敛特性,不存在过拟合现象。
4.3 继电保护压板状态识别结果对比
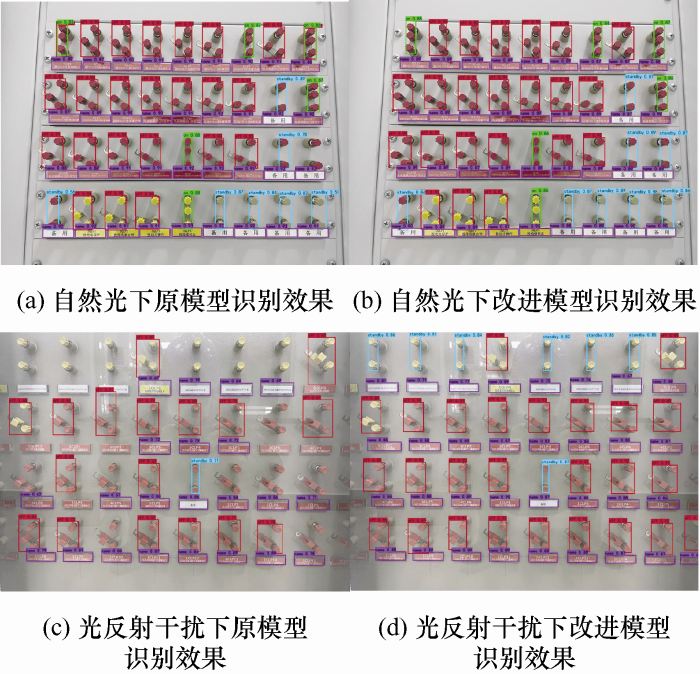
为了验证引入CBAM模块能提升模型的鲁棒性,采集站内实际运行屏柜的100张压板图像作为附加测试样本,附加测试样本包含玻璃光反射,而在训练阶段所用训练样本均不含玻璃光反射干扰。分别在自然光下和玻璃反光干扰下比较了YOLOX模型和改进模型的识别效果,如图8 所示。
图8
如图8a 、8b 所示,自然光下改进前模型对少数位于图像边缘的备用压板存在漏识别,对投入压板存在误识别,而改进后模型则完全识别正确;如图8c 、8d 所示,在光反射干扰下改进前模型存在较高漏识别率,而改进后模型依然保持正确的识别结果。由此易见,改进模型借助注意力机制有效提高了在光反射干扰下对目标的关注,提高了模型的鲁棒性。
进一步将CBAM模块与不同类型注意力机制模块进行对比,其结果如表2 所示。
由表2 可知,对于光反射干扰下的压板图像,采用CBAM模块能获得更好的识别效果,其平均准确度均值较采用STN模块和SENet模块分别提升了4.9%和2.5%,而采用SENet模块则优于采用STN模块。这是由于SENet模块对于通道维度上的光噪声具有抑制能力,优化了特征表达;而CBAM模块融合了通道注意力机制与空间注意力机制,其特征优化效果更为显著。
最后,基于训练阶段划分的测试集将改进模型与Faster-RCNN、YOLOv3以及传统YOLOX模型进行压板状态识别性能对比,如表3 所示。
结果表明,Faster-RCNN模型能取得较高的识别精度,其平均准确度均值大于YOLOv3和YOLOX模型,但其在运行速度和模型大小的表现上与精度并不平衡,每秒检测数仅有21.3,且其模型占用字节数也远大于其他模型。较YOLOX模型,改进YOLOX模型能获得更高的识别精度,其平均准确度均值达到98.1%,较改进前提高了5.3%,但其在模型大小和运行速度上的表现稍有下降,原因在于注意力模块使模型结构变得更复杂,增加了运算量和模型参数。考虑到现有的移动APP和智能巡检机器人等设备硬件平台的计算性能及现场工作的实际需求,改进模型已符合轻量化、高性能的特点,上述损失是完全可以接受的,改进YOLOX模型相比传统方法更具有优势。
4.4 继电保护压板双重名称识别结果对比
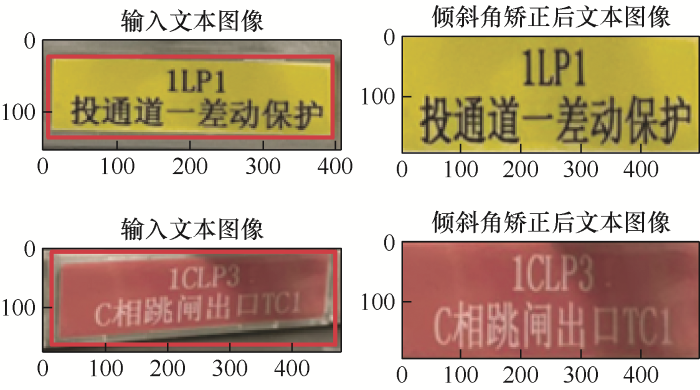
通过YOLOX模型可以获取由边界框定位的压板标签区域,该区域包含待识别的压板双重名称文本,对该区域图像进行倾斜角矫正,如图9 所示。
图9
由图9 可知,本文所提算法能有效实现倾斜角矫正。将文本图像区域切割后送入Tesseract5.0光学字符识别引擎进行识别,为了验证本文所采用改进手段的效果,以引擎自带语料库为基准,统计了采用两种改进方式后的压板双重名称文本识别准确率,其结果如表4 所示。
由表4 可知,基于自带语料库的光学字符识别引擎对中文字符的识别率仅为58.4%,非中文字符识别率仅为47.2%。而采用构建的专用语料库后,中文字符和非中文字符识别准确率分别提高31.8%和44.6%。如进一步增加倾斜角矫正,中文和非中文字符识别率还可以分别获得6.4%和4.2%的提升。
5 结论
本文提出一种基于改进YOLOX的继电保护压板状态校核方法,并通过变电站内实际算例获得了以下结论。
(1) 通过引入CBAM注意力机制改进YOLOX模型主干特征提取模块能提高模型的识别精度,较改进前平均准确度均值提升了5.3%,同时能提升模型对于光反射干扰的鲁棒性。
(2) 通过构建继电保护压板双重名称专业语料库,中文字符和非中文字符的识别率均得以显著提升,分别提升了31.8%和44.6%,同时通过对文本区域的倾斜角矫正,在此基础上识别率得以进一步提高。综上,所提方法可以更好地辅助智能机器人对压板的投退状态进行校核,提高变电站巡检的效率和智能化程度。
注意力模块应用于模型结构中不同位置所产生的影响效果以及所提方法在不同场景下的泛化性、可移植性是未来需要进一步研究的工作。
参考文献
View Option
[1]
李金 , 张喜铭 , 谢型浪 , 等 . 变电站安全运维装置技术方案
[J]. 电气工程学报 , 2020 , 15 (4 ):114 -120 .
[本文引用: 1]
LI Jin ZHANG Ximing XIE Xinglang et al. Technical scheme of substation safety operation and maintenance device
[J]. Journal of Electrical Engineering , 2020 , 15 (4 ):114 -120 .
[本文引用: 1]
[2]
周立辉 , 张永生 , 孙勇 , 等 . 智能变电站巡检机器人研制及应用
[J]. 电力系统自动化 , 2011 , 35 (19 ):85 -88 .
[本文引用: 1]
ZHOU Lihui ZHANG Yongsheng SUN Yong et al. Development and application of equipment inspection robot for smart substations
[J]. Automation of Electric Power Systems , 2011 , 35 (19 ):85 -88 .
[本文引用: 1]
[3]
谢林枫 , 蒋超 , 孙秋芹 , 等 . 基于AMC算法的变电站巡检机器人地图创建与定位
[J]. 电力工程技术 , 2019 , 38 (5 ):16 -23 .
[本文引用: 1]
XIE Linfeng JIANG Chao SUN Qiuqin et al. The global map’s creating and positioning of substation inspection robot based on adaptive Monte Carlo particle filter algorithm
[J]. Electrical Power Engineering Technology , 2019 , 38 (5 ):16 -23 .
[本文引用: 1]
[4]
袁朝晖 , 付文龙 , 李佰霖 , 等 . 基于多策略分割融合与形态特征辨识的变电站保护压板状态识别
[J]. 电力系统保护与控制 , 2022 , 50 (1 ):98 -106 .
[本文引用: 1]
YUAN Zhaohui FU Wenlong LI Bailin et al. Protection platen status recognition for a smart substation based on multi-strategy segmentation and fusion and morphological feature identification
[J]. Power System Protection and Control , 2022 , 50 (1 ):98 -106 .
[本文引用: 1]
[5]
付文龙 , 谭佳文 , 吴喜春 , 等 . 基于图像处理与形态特征分析的智能变电站保护压板状态识别
[J]. 电力自动化设备 , 2019 , 39 (7 ):203 -207 .
[本文引用: 1]
FU Wenlong TAN Jiawen WU Xichun et al. Protection platen status recognition based on image processing and morphological feature analysis for smart substation
[J]. Electric Power Automation Equipment , 2019 , 39 (7 ):203 -207 .
[本文引用: 1]
[6]
梁辰 , 孙建文 , 王兰玉 , 等 . 应用聚类和证据理论实现变电站保护压板状态校核
[J]. 电网技术 , 2020 , 44 (6 ):2343 -2349 .
[本文引用: 1]
LIANG Chen SUN Jianwen WANG Lanyu et al. Application of clustering and evidence theory to checking the status of substation protection platen
[J]. Power System Technology , 2020 , 44 (6 ):2343 -2349 .
[本文引用: 1]
[7]
王伟 , 张彦龙 , 翟登辉 , 等 . 基于OpenCV+SSD深度学习模型的变电站压板状态智能识别
[J]. 电测与仪表 , 2022 , 59 (1 ):106 -112 .
[本文引用: 1]
WANG Wei ZHANG Yanlong ZHAI Denghui et al. Intelligent identification of substation platen state based on OpenCV+SSD deep learning model
[J]. Electrical Measurement & Instrumentation , 2022 , 59 (1 ):106 -112 .
[本文引用: 1]
[8]
周克 , 杨倩文 , 王耀艺 , 等 . 一种改进的压板状态识别SSD算法
[J]. 电测与仪表 , 2021 , 58 (1 ):69 -76 .
[本文引用: 1]
ZHOU Ke YANG Qianwen WANG Yaoyi et al. An improved SSD algorithm for pressure platestatus recognition
[J]. Electrical Measurement & Instrumentation , 2021 , 58 (1 ):69 -76 .
[本文引用: 1]
[9]
汪洋 , 黎恒烜 , 鄂士平 , 等 . 基于深度学习的变电站硬压板状态检测与识别算法
[J]. 沈阳工业大学学报 , 2020 , 42 (6 ):676 -680 .
DOI:10.7688/j.issn.1000-1646.2020.06.11
[本文引用: 1]
针对变电站的一键顺控停、送电操作不当将导致投退操作的问题,提出了一种基于深度学习的变电站硬压板状态检测与识别算法.使用一个共享网络提取图像特征,基于多任务学习方法建立3个分支联合解决硬压板位置检测、投切状态检测和标识检测这3个任务;采集标注了8 000张硬压板图片数据用于训练和测试.结果表明,所提出的方法能够在提升硬压板状态识别精度的同时,也提升一键顺控操作的安全性.
WANG Yang LI Hengxuan E Shiping et al. State detection and recognition algorithm for hard platens of substation based on deep learning
[J]. Journal of Shenyang University of Technology , 2020 , 42 (6 ):676 -680 .
DOI:10.7688/j.issn.1000-1646.2020.06.11
[本文引用: 1]
Aiming at the problem that the one-key sequential control of stopping and improper power transmission operation of substation can lead to throwback and retreat operation, a state detection and recognition algorithm for hard platens of substation based on deep learning was proposed. A shared network was used to extract image features, and three branches were established according to a multi-task learning method to jointly finish three tasks, i. e. position detection, switching state detection and identity detection of hard platens. In addition, 8 000 hard platens were collected and labeled for training and testing. The results show that the as-proposed method can improve the accuracy of state recognition of hard platens, and it also improves the safety of one-key sequential operation at the same time.
[10]
ULLAH M B CPU based YOLO:A real time object detection algorithm
[C]// 2020 IEEE Region 10 Symposium (TENSYMP), June 5-7,2020 ,Dhaka,Bangladesh,2020:552 -555 .
[本文引用: 1]
[11]
LIU Bingqian HUANG Jianye LIN Shuang et al. Improved YOLOX-S abnormal condition detection for power transmission line corridors
[C]// IEEE 3rd International Conference on Power Data Science(ICPDS) , December 26-26,2021 ,Harbin,China,2021:13 -16 .
[本文引用: 2]
[12]
LI Youyou HE Binbin MELGANI F et al. Point-based weakly supervised learning for object detection in high spatial resolution remote sensing images
[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing , 2021 , 14 (2 ):5361 -5371 .
DOI:10.1109/JSTARS.2021.3076072
URL
[本文引用: 1]
[13]
WANG C Y LIAO H Y WU Y H et al. CSPNet:A new backbone that can enhance learning capability of CNN
[C]// 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops(CVPRW), June 14-19,2020 ,Seattle,WA,USA,2020:1571 -1580 .
[本文引用: 1]
[14]
LIN T Y DOLLAR P GIRSHICK R et al. Feature pyramid networks for object detection
[C]// 2017 IEEE Conference on Computer Vision and Pattern Recognition, July 21-26,2017 ,Honolulu,HI,USA,2017:936 -944 .
[本文引用: 1]
[15]
蔡逢煌 , 张岳鑫 , 黄捷 . 基于YOLOv3与注意力机制的桥梁表面裂痕检测算法
[J]. 模式识别与人工智能 , 2020 , 33 (10 ):926 -933 .
DOI:10.16451/j.cnki.issn1003-6059.202010007
[本文引用: 1]
为了实现桥梁表面裂痕的快速准确检测和及时修复,在目标检测网络YOLOv3的基础上,结合深度可分离卷积与注意力机制,提出实时检测桥梁表面裂痕的轻量级目标检测网络.使用深度可分离卷积操作替换YOLOv3的标准卷积操作,达到降低网络参数量的目的.同时为了解决深度可分离卷积操作带来的网络精度下降的问题,引入MobileNet v2的反转残差块.卷积块注意力模块同时关注图像的通道注意力和空间注意力,较好地进行特征的自适应学习.实验表明,文中算法可实现对桥梁表面裂痕的实时检测.相比YOLOv3,具有更高的检测精度和检测速度.
CAI Fenghuang ZHANG Yuexin HUANG Jie Bridge surface crack detection algorithm based on YOLOv3 and attention mechanism
[J]. Pattern Recognition and Artificial Intelligence , 2020 , 33 (10 ):926 -933 .
DOI:10.16451/j.cnki.issn1003-6059.202010007
[本文引用: 1]
To realize fast and accurate detection of bridge surface cracks for the timely repair, a bridge surface crack detection algorithm based on improved YOLOv3 (Crack-YOLO) is proposed. Crack-YOLO is combined with depthwise separable convolutions and attention mechanism to detect bridge surface cracks in real time. The standard convolution of YOLOv3 is replaced with the depthwise separable convolution to reduce the number of network parameters. Moreover, the inverted residual block of MobileNet V2 is introduced to solve the problem of precision decline caused by depthwise separable convolution. In Crack-YOLO, both channel attention and spatial attention of the image are taken into account through the convolution block attention module to learn the feature selectively. The experimental results show that Crack-YOLO detects the cracks on the surface of the bridge in real time. Compared with YOLOv3, Crack-YOLO produces smaller weights and higher detection accuracy at a higher detection speed.
[16]
GAO Zishu YANG Guodong LI En et al. Novel feature fusion module-based detector for small insulator defect detection
[J]. IEEE Sensors Journal , 2021 , 21 (15 ):16807 -16814 .
DOI:10.1109/JSEN.2021.3073422
URL
[本文引用: 1]
[17]
羊冰清 , 张周燕 , 朱小良 . 基于数字图像处理的液位测量系统的研究与实现
[J]. 电力工程技术 , 2018 , 37 (4 ):57 -64 .
[本文引用: 1]
YANG Bingqing ZHANG Zhouyan ZHU Xiaoliang Study and implement on the measurement system of liquid level based on digital image processing
[J]. Electrical Power Engineering Technology , 2018 , 37 (4 ):57 -64 .
[本文引用: 1]
[18]
操昊鹏 , 曾卫明 , 石玉虎 , 等 . 基于Hough变换和总体最小二乘法的电力线检测
[J]. 计算机技术与发展 , 2018 , 28 (10 ):164 -167 .
[本文引用: 1]
CAO Haopeng ZENG Weiming SHI Yuhu et al. Power line detection based on Hough transform and total least squares method
[J]. Computer Technology and Development , 2018 , 28 (10 ):164 -167 .
[本文引用: 1]
[19]
李思妍 , 台升 , 张宇航 , 等 . 基于轻量化YOLOv3和Tesseract OCR的电力设备标志牌识别技术
[J]. 智慧电力 , 2021 , 49 (7 ):79 -85 ,108.
[本文引用: 1]
LI Siyan TAI Sheng ZHANG Yuhang et al. Electrical sign recognition technology based on simplified YOLOv3 and Tesseract OCR
[J]. Smart Power , 2021 , 49 (7 ):79 -85 ,108.
[本文引用: 1]
[20]
陈昊 , 姚凯 , 张海华 , 等 . 变电站设备缺陷图像识别的实用化评价方法
[J]. 湖北电力 , 2021 , 45 (5 ):52 -57 .
[本文引用: 1]
CHEN Hao YAO Kai ZHANG Haihua et al. A practical evaluation method for image recognition algorithm of device defects in substations
[J]. Hubei Electric Power , 2021 , 45 (5 ):52 -57 .
[本文引用: 1]
[21]
WANG Aili WANG Minhui JIANG Kaiyuan et al. A novel lidar data classification algorithm combined densenet with STN
[C]// 2019 IEEE International Geoscience and Remote Sensing Symposium,July 28-August 2 , 2019 ,Yokohama,Japan,2019:2483 -2486 .
[本文引用: 1]
[22]
刘学平 , 李玙乾 , 刘励 , 等 . 嵌入SENet结构的改进YOLOV3目标识别算法
[J]. 计算机工程 , 2019 , 45 (11 ):243 -248 .
DOI:10.19678/j.issn.1000-3428.0052861
[本文引用: 1]
为准确识别工业图像中的目标零件,提出一种改进的YOLOV3目标识别算法。结合K-means聚类与粒子群优化算法进行锚框计算,以降低初始点对聚类结果的影响,加快算法收敛速度。同时在YOLOV3网络shortcut层嵌入SENet结构,得到SE-YOLOV3网络。对零件图像进行数据增强并加入零件标注,制作包含10 816张图片的样本集,用于算法训练和测试。实验结果表明,该算法能够获得平均交并比为83.01%的锚框,当样本图像存在较多残缺零件干扰时,YOLOV3存在将背景识别为零件的情况,其查准率与查全率分别为72.11%和97.51%,而SE-YOLOV3能有效减少假正例数量,其查准率与查全率分别为90.39%和93.25%。
LIU Xueping LI Yuqian LIU Li et al. Improved YOLOV3 target recognition algorithm with embedded SENet structure
[J]. Computer Engineering , 2019 , 45 (11 ):243 -248 .
DOI:10.19678/j.issn.1000-3428.0052861
[本文引用: 1]
In order to accurately identify the target parts in the industrial image,an improved YOLOV3 target recognition algorithm is proposed.The K-means clustering and particle swarm optimization algorithm are combined to calculate the anchor box to reduce the influence of the initial point on the clustering result and speed up the convergence of the algorithm.The SE-YOLOV3 network is obtained by embedding the SENet structure after the shortcut layers.A sample set containing 10 816 images is created by collecting the part images and enhancing the data while labeling the part in the image,which is used to train and test the network.Experimental results show that the proposed algorithm can obtain an anchor box with an average IoU of 83.01%.When there are more defective parts in the sample image,YOLOV3 might identify the background as a part,and the precision and recall rate are 72.11% and 97.51% respectively,while the SE-YOLOV3 can accurately identify target parts,whose precision and recall rate are 90.39% and 93.25% respectively.
变电站安全运维装置技术方案
1
2020
... 随着经济发展社会用电量不断提升,电网安全稳定运行的重要性正日益凸显.变电站作为电网枢纽,对其站内继电保护设备的定期巡检是保障电网运行安全的有效手段[1 ] .保护压板状态校核是巡检工作的重要组成部分,现阶段往往采用传统的人工方式实现,即一人持压板卡读取双重名称及投退状态,另一人复诵核对.该方法存在劳动力成本高、效率低的缺点,而且常因视觉疲劳、精神懈怠等原因导致错核、漏核,从而限制了巡检质量,甚至导致二次回路出现安全隐患.由于近年来大量新变电站、新设备的投入运行,站内继电保护压板数量日益增多,压板状态校核的工作量进一步加大,人工方法导致压板投退错误从而引起保护不正确动作的风险也随之成倍增大.此背景下,亟需一种针对保护压板状态校核的智能化解决方案以辅助现有人工模式,提高校核效率. ...
Technical scheme of substation safety operation and maintenance device
1
2020
... 随着经济发展社会用电量不断提升,电网安全稳定运行的重要性正日益凸显.变电站作为电网枢纽,对其站内继电保护设备的定期巡检是保障电网运行安全的有效手段[1 ] .保护压板状态校核是巡检工作的重要组成部分,现阶段往往采用传统的人工方式实现,即一人持压板卡读取双重名称及投退状态,另一人复诵核对.该方法存在劳动力成本高、效率低的缺点,而且常因视觉疲劳、精神懈怠等原因导致错核、漏核,从而限制了巡检质量,甚至导致二次回路出现安全隐患.由于近年来大量新变电站、新设备的投入运行,站内继电保护压板数量日益增多,压板状态校核的工作量进一步加大,人工方法导致压板投退错误从而引起保护不正确动作的风险也随之成倍增大.此背景下,亟需一种针对保护压板状态校核的智能化解决方案以辅助现有人工模式,提高校核效率. ...
智能变电站巡检机器人研制及应用
1
2011
... 实现压板状态校核的关键是对其投退状态进行有效识别.目前,依托于具有图像采集功能的变电站室内智能巡检机器人[2 -3 ] 等硬件平台,工程实践中希望基于屏柜图像对压板状态实现精确识别.当前图像识别方法主要分为两类:① 基于传统图像形态特征进行辨识,文献[4 ⇓ -6 ]在图像分割的基础上,构造压板在不同状态下的差异化特征,如方向角、重心坐标等,再基于形态特征构造判别指标以实现状态辨识;② 基于深度学习算法进行辨识,文献[7 -8 ]基于SSD模型提取多层图像特征,通过不断调参并采用正则化处理提高准确度和泛化能力;文献[9 ]采用Faster-RCNN网络构建压板检测模型,再通过Softmax结构进行投退状态二分类. ...
Development and application of equipment inspection robot for smart substations
1
2011
... 实现压板状态校核的关键是对其投退状态进行有效识别.目前,依托于具有图像采集功能的变电站室内智能巡检机器人[2 -3 ] 等硬件平台,工程实践中希望基于屏柜图像对压板状态实现精确识别.当前图像识别方法主要分为两类:① 基于传统图像形态特征进行辨识,文献[4 ⇓ -6 ]在图像分割的基础上,构造压板在不同状态下的差异化特征,如方向角、重心坐标等,再基于形态特征构造判别指标以实现状态辨识;② 基于深度学习算法进行辨识,文献[7 -8 ]基于SSD模型提取多层图像特征,通过不断调参并采用正则化处理提高准确度和泛化能力;文献[9 ]采用Faster-RCNN网络构建压板检测模型,再通过Softmax结构进行投退状态二分类. ...
基于AMC算法的变电站巡检机器人地图创建与定位
1
2019
... 实现压板状态校核的关键是对其投退状态进行有效识别.目前,依托于具有图像采集功能的变电站室内智能巡检机器人[2 -3 ] 等硬件平台,工程实践中希望基于屏柜图像对压板状态实现精确识别.当前图像识别方法主要分为两类:① 基于传统图像形态特征进行辨识,文献[4 ⇓ -6 ]在图像分割的基础上,构造压板在不同状态下的差异化特征,如方向角、重心坐标等,再基于形态特征构造判别指标以实现状态辨识;② 基于深度学习算法进行辨识,文献[7 -8 ]基于SSD模型提取多层图像特征,通过不断调参并采用正则化处理提高准确度和泛化能力;文献[9 ]采用Faster-RCNN网络构建压板检测模型,再通过Softmax结构进行投退状态二分类. ...
The global map’s creating and positioning of substation inspection robot based on adaptive Monte Carlo particle filter algorithm
1
2019
... 实现压板状态校核的关键是对其投退状态进行有效识别.目前,依托于具有图像采集功能的变电站室内智能巡检机器人[2 -3 ] 等硬件平台,工程实践中希望基于屏柜图像对压板状态实现精确识别.当前图像识别方法主要分为两类:① 基于传统图像形态特征进行辨识,文献[4 ⇓ -6 ]在图像分割的基础上,构造压板在不同状态下的差异化特征,如方向角、重心坐标等,再基于形态特征构造判别指标以实现状态辨识;② 基于深度学习算法进行辨识,文献[7 -8 ]基于SSD模型提取多层图像特征,通过不断调参并采用正则化处理提高准确度和泛化能力;文献[9 ]采用Faster-RCNN网络构建压板检测模型,再通过Softmax结构进行投退状态二分类. ...
基于多策略分割融合与形态特征辨识的变电站保护压板状态识别
1
2022
... 实现压板状态校核的关键是对其投退状态进行有效识别.目前,依托于具有图像采集功能的变电站室内智能巡检机器人[2 -3 ] 等硬件平台,工程实践中希望基于屏柜图像对压板状态实现精确识别.当前图像识别方法主要分为两类:① 基于传统图像形态特征进行辨识,文献[4 ⇓ -6 ]在图像分割的基础上,构造压板在不同状态下的差异化特征,如方向角、重心坐标等,再基于形态特征构造判别指标以实现状态辨识;② 基于深度学习算法进行辨识,文献[7 -8 ]基于SSD模型提取多层图像特征,通过不断调参并采用正则化处理提高准确度和泛化能力;文献[9 ]采用Faster-RCNN网络构建压板检测模型,再通过Softmax结构进行投退状态二分类. ...
Protection platen status recognition for a smart substation based on multi-strategy segmentation and fusion and morphological feature identification
1
2022
... 实现压板状态校核的关键是对其投退状态进行有效识别.目前,依托于具有图像采集功能的变电站室内智能巡检机器人[2 -3 ] 等硬件平台,工程实践中希望基于屏柜图像对压板状态实现精确识别.当前图像识别方法主要分为两类:① 基于传统图像形态特征进行辨识,文献[4 ⇓ -6 ]在图像分割的基础上,构造压板在不同状态下的差异化特征,如方向角、重心坐标等,再基于形态特征构造判别指标以实现状态辨识;② 基于深度学习算法进行辨识,文献[7 -8 ]基于SSD模型提取多层图像特征,通过不断调参并采用正则化处理提高准确度和泛化能力;文献[9 ]采用Faster-RCNN网络构建压板检测模型,再通过Softmax结构进行投退状态二分类. ...
基于图像处理与形态特征分析的智能变电站保护压板状态识别
1
2019
... 实现压板状态校核的关键是对其投退状态进行有效识别.目前,依托于具有图像采集功能的变电站室内智能巡检机器人[2 -3 ] 等硬件平台,工程实践中希望基于屏柜图像对压板状态实现精确识别.当前图像识别方法主要分为两类:① 基于传统图像形态特征进行辨识,文献[4 ⇓ -6 ]在图像分割的基础上,构造压板在不同状态下的差异化特征,如方向角、重心坐标等,再基于形态特征构造判别指标以实现状态辨识;② 基于深度学习算法进行辨识,文献[7 -8 ]基于SSD模型提取多层图像特征,通过不断调参并采用正则化处理提高准确度和泛化能力;文献[9 ]采用Faster-RCNN网络构建压板检测模型,再通过Softmax结构进行投退状态二分类. ...
Protection platen status recognition based on image processing and morphological feature analysis for smart substation
1
2019
... 实现压板状态校核的关键是对其投退状态进行有效识别.目前,依托于具有图像采集功能的变电站室内智能巡检机器人[2 -3 ] 等硬件平台,工程实践中希望基于屏柜图像对压板状态实现精确识别.当前图像识别方法主要分为两类:① 基于传统图像形态特征进行辨识,文献[4 ⇓ -6 ]在图像分割的基础上,构造压板在不同状态下的差异化特征,如方向角、重心坐标等,再基于形态特征构造判别指标以实现状态辨识;② 基于深度学习算法进行辨识,文献[7 -8 ]基于SSD模型提取多层图像特征,通过不断调参并采用正则化处理提高准确度和泛化能力;文献[9 ]采用Faster-RCNN网络构建压板检测模型,再通过Softmax结构进行投退状态二分类. ...
应用聚类和证据理论实现变电站保护压板状态校核
1
2020
... 实现压板状态校核的关键是对其投退状态进行有效识别.目前,依托于具有图像采集功能的变电站室内智能巡检机器人[2 -3 ] 等硬件平台,工程实践中希望基于屏柜图像对压板状态实现精确识别.当前图像识别方法主要分为两类:① 基于传统图像形态特征进行辨识,文献[4 ⇓ -6 ]在图像分割的基础上,构造压板在不同状态下的差异化特征,如方向角、重心坐标等,再基于形态特征构造判别指标以实现状态辨识;② 基于深度学习算法进行辨识,文献[7 -8 ]基于SSD模型提取多层图像特征,通过不断调参并采用正则化处理提高准确度和泛化能力;文献[9 ]采用Faster-RCNN网络构建压板检测模型,再通过Softmax结构进行投退状态二分类. ...
Application of clustering and evidence theory to checking the status of substation protection platen
1
2020
... 实现压板状态校核的关键是对其投退状态进行有效识别.目前,依托于具有图像采集功能的变电站室内智能巡检机器人[2 -3 ] 等硬件平台,工程实践中希望基于屏柜图像对压板状态实现精确识别.当前图像识别方法主要分为两类:① 基于传统图像形态特征进行辨识,文献[4 ⇓ -6 ]在图像分割的基础上,构造压板在不同状态下的差异化特征,如方向角、重心坐标等,再基于形态特征构造判别指标以实现状态辨识;② 基于深度学习算法进行辨识,文献[7 -8 ]基于SSD模型提取多层图像特征,通过不断调参并采用正则化处理提高准确度和泛化能力;文献[9 ]采用Faster-RCNN网络构建压板检测模型,再通过Softmax结构进行投退状态二分类. ...
基于OpenCV+SSD深度学习模型的变电站压板状态智能识别
1
2022
... 实现压板状态校核的关键是对其投退状态进行有效识别.目前,依托于具有图像采集功能的变电站室内智能巡检机器人[2 -3 ] 等硬件平台,工程实践中希望基于屏柜图像对压板状态实现精确识别.当前图像识别方法主要分为两类:① 基于传统图像形态特征进行辨识,文献[4 ⇓ -6 ]在图像分割的基础上,构造压板在不同状态下的差异化特征,如方向角、重心坐标等,再基于形态特征构造判别指标以实现状态辨识;② 基于深度学习算法进行辨识,文献[7 -8 ]基于SSD模型提取多层图像特征,通过不断调参并采用正则化处理提高准确度和泛化能力;文献[9 ]采用Faster-RCNN网络构建压板检测模型,再通过Softmax结构进行投退状态二分类. ...
Intelligent identification of substation platen state based on OpenCV+SSD deep learning model
1
2022
... 实现压板状态校核的关键是对其投退状态进行有效识别.目前,依托于具有图像采集功能的变电站室内智能巡检机器人[2 -3 ] 等硬件平台,工程实践中希望基于屏柜图像对压板状态实现精确识别.当前图像识别方法主要分为两类:① 基于传统图像形态特征进行辨识,文献[4 ⇓ -6 ]在图像分割的基础上,构造压板在不同状态下的差异化特征,如方向角、重心坐标等,再基于形态特征构造判别指标以实现状态辨识;② 基于深度学习算法进行辨识,文献[7 -8 ]基于SSD模型提取多层图像特征,通过不断调参并采用正则化处理提高准确度和泛化能力;文献[9 ]采用Faster-RCNN网络构建压板检测模型,再通过Softmax结构进行投退状态二分类. ...
一种改进的压板状态识别SSD算法
1
2021
... 实现压板状态校核的关键是对其投退状态进行有效识别.目前,依托于具有图像采集功能的变电站室内智能巡检机器人[2 -3 ] 等硬件平台,工程实践中希望基于屏柜图像对压板状态实现精确识别.当前图像识别方法主要分为两类:① 基于传统图像形态特征进行辨识,文献[4 ⇓ -6 ]在图像分割的基础上,构造压板在不同状态下的差异化特征,如方向角、重心坐标等,再基于形态特征构造判别指标以实现状态辨识;② 基于深度学习算法进行辨识,文献[7 -8 ]基于SSD模型提取多层图像特征,通过不断调参并采用正则化处理提高准确度和泛化能力;文献[9 ]采用Faster-RCNN网络构建压板检测模型,再通过Softmax结构进行投退状态二分类. ...
An improved SSD algorithm for pressure platestatus recognition
1
2021
... 实现压板状态校核的关键是对其投退状态进行有效识别.目前,依托于具有图像采集功能的变电站室内智能巡检机器人[2 -3 ] 等硬件平台,工程实践中希望基于屏柜图像对压板状态实现精确识别.当前图像识别方法主要分为两类:① 基于传统图像形态特征进行辨识,文献[4 ⇓ -6 ]在图像分割的基础上,构造压板在不同状态下的差异化特征,如方向角、重心坐标等,再基于形态特征构造判别指标以实现状态辨识;② 基于深度学习算法进行辨识,文献[7 -8 ]基于SSD模型提取多层图像特征,通过不断调参并采用正则化处理提高准确度和泛化能力;文献[9 ]采用Faster-RCNN网络构建压板检测模型,再通过Softmax结构进行投退状态二分类. ...
基于深度学习的变电站硬压板状态检测与识别算法
1
2020
... 实现压板状态校核的关键是对其投退状态进行有效识别.目前,依托于具有图像采集功能的变电站室内智能巡检机器人[2 -3 ] 等硬件平台,工程实践中希望基于屏柜图像对压板状态实现精确识别.当前图像识别方法主要分为两类:① 基于传统图像形态特征进行辨识,文献[4 ⇓ -6 ]在图像分割的基础上,构造压板在不同状态下的差异化特征,如方向角、重心坐标等,再基于形态特征构造判别指标以实现状态辨识;② 基于深度学习算法进行辨识,文献[7 -8 ]基于SSD模型提取多层图像特征,通过不断调参并采用正则化处理提高准确度和泛化能力;文献[9 ]采用Faster-RCNN网络构建压板检测模型,再通过Softmax结构进行投退状态二分类. ...
State detection and recognition algorithm for hard platens of substation based on deep learning
1
2020
... 实现压板状态校核的关键是对其投退状态进行有效识别.目前,依托于具有图像采集功能的变电站室内智能巡检机器人[2 -3 ] 等硬件平台,工程实践中希望基于屏柜图像对压板状态实现精确识别.当前图像识别方法主要分为两类:① 基于传统图像形态特征进行辨识,文献[4 ⇓ -6 ]在图像分割的基础上,构造压板在不同状态下的差异化特征,如方向角、重心坐标等,再基于形态特征构造判别指标以实现状态辨识;② 基于深度学习算法进行辨识,文献[7 -8 ]基于SSD模型提取多层图像特征,通过不断调参并采用正则化处理提高准确度和泛化能力;文献[9 ]采用Faster-RCNN网络构建压板检测模型,再通过Softmax结构进行投退状态二分类. ...
CPU based YOLO:A real time object detection algorithm
1
2020
... YOLO模型多被应用于目标检测[10 ] ,作为该系列模型中的最新版本,YOLOX采用了Mosaic数据增强、SimOTA动态匹配正样本等改进手段[11 ] ,具有特征提取能力强、计算性能高、易于部署的优势,但同时也存在检测性能易受环境复杂度影响的不足.YOLOX模型的基本结构如图1 所示,其整体由4个部分构成,分别是输入层、主干特征提取模块CSPDarknet、加强特征提取模块FPN以及分类回归模块YOLO Head. ...
Improved YOLOX-S abnormal condition detection for power transmission line corridors
2
... YOLO模型多被应用于目标检测[10 ] ,作为该系列模型中的最新版本,YOLOX采用了Mosaic数据增强、SimOTA动态匹配正样本等改进手段[11 ] ,具有特征提取能力强、计算性能高、易于部署的优势,但同时也存在检测性能易受环境复杂度影响的不足.YOLOX模型的基本结构如图1 所示,其整体由4个部分构成,分别是输入层、主干特征提取模块CSPDarknet、加强特征提取模块FPN以及分类回归模块YOLO Head. ...
... 数据输入经Focus模块[11 ] 进行通道调整,再依次经过4个Resblock Body模块.在每个Resblock Body模块中通过CSPNet结构进行特征提取[12 -13 ] .使用主干特征提取模块最终会获得3个有效特征层,自下而上分别记为有效特征层3、有效特征层2和有效特征层1,其分别是输入图片压缩3~5次的结果,后续将作为加强主干特征网络的输入. ...
Point-based weakly supervised learning for object detection in high spatial resolution remote sensing images
1
2021
... 数据输入经Focus模块[11 ] 进行通道调整,再依次经过4个Resblock Body模块.在每个Resblock Body模块中通过CSPNet结构进行特征提取[12 -13 ] .使用主干特征提取模块最终会获得3个有效特征层,自下而上分别记为有效特征层3、有效特征层2和有效特征层1,其分别是输入图片压缩3~5次的结果,后续将作为加强主干特征网络的输入. ...
CSPNet:A new backbone that can enhance learning capability of CNN
1
... 数据输入经Focus模块[11 ] 进行通道调整,再依次经过4个Resblock Body模块.在每个Resblock Body模块中通过CSPNet结构进行特征提取[12 -13 ] .使用主干特征提取模块最终会获得3个有效特征层,自下而上分别记为有效特征层3、有效特征层2和有效特征层1,其分别是输入图片压缩3~5次的结果,后续将作为加强主干特征网络的输入. ...
Feature pyramid networks for object detection
1
... 由于运行保护屏柜处于被锁住的状态,在不同的光照条件下,透过保护屏玻璃采集到的压板图像会受到不同强度的光反射干扰,而这不利于模型的识别效果.CBAM卷积注意力模块能够增强复杂背景下待识别目标的特征表达能力[14 ] ,因此可以通过引入该模块提升反射光干扰下的模型鲁棒性.CBAM卷积注意力模块的结构如图2 所示. ...
基于YOLOv3与注意力机制的桥梁表面裂痕检测算法
1
2020
... 如图2 所示,CBAM卷积注意力模块由通道注意力模块和空间注意力模块构成[15 ] .对于输入的特征层,注意力机制会分别沿着独立的通道维度和空间维度依次推断注意力图,然后将注意力图与输入特征图相乘以进行自适应特征优化[16 ] ,从而增强重要信息、过滤无用信息. ...
Bridge surface crack detection algorithm based on YOLOv3 and attention mechanism
1
2020
... 如图2 所示,CBAM卷积注意力模块由通道注意力模块和空间注意力模块构成[15 ] .对于输入的特征层,注意力机制会分别沿着独立的通道维度和空间维度依次推断注意力图,然后将注意力图与输入特征图相乘以进行自适应特征优化[16 ] ,从而增强重要信息、过滤无用信息. ...
Novel feature fusion module-based detector for small insulator defect detection
1
2021
... 如图2 所示,CBAM卷积注意力模块由通道注意力模块和空间注意力模块构成[15 ] .对于输入的特征层,注意力机制会分别沿着独立的通道维度和空间维度依次推断注意力图,然后将注意力图与输入特征图相乘以进行自适应特征优化[16 ] ,从而增强重要信息、过滤无用信息. ...
基于数字图像处理的液位测量系统的研究与实现
1
2018
... 由式(6)可知,获得8个参数的值即能确定透视变换矩阵.由于经透视变换后希望获得水平的文本图像,因此需要在倾斜文本图像中获得4个点的坐标,且这些点所围成区域的边应与倾斜文本平行.鉴于标签颜色与背板背景色存在明显差异,且边缘保持水平,可以基于Canny边缘检测[17 ] 和Hough直线检测[18 ] 确定平行边,进而求解坐标,最后获得透视变换矩阵的参数,其流程如图4 所示. ...
Study and implement on the measurement system of liquid level based on digital image processing
1
2018
... 由式(6)可知,获得8个参数的值即能确定透视变换矩阵.由于经透视变换后希望获得水平的文本图像,因此需要在倾斜文本图像中获得4个点的坐标,且这些点所围成区域的边应与倾斜文本平行.鉴于标签颜色与背板背景色存在明显差异,且边缘保持水平,可以基于Canny边缘检测[17 ] 和Hough直线检测[18 ] 确定平行边,进而求解坐标,最后获得透视变换矩阵的参数,其流程如图4 所示. ...
基于Hough变换和总体最小二乘法的电力线检测
1
2018
... 由式(6)可知,获得8个参数的值即能确定透视变换矩阵.由于经透视变换后希望获得水平的文本图像,因此需要在倾斜文本图像中获得4个点的坐标,且这些点所围成区域的边应与倾斜文本平行.鉴于标签颜色与背板背景色存在明显差异,且边缘保持水平,可以基于Canny边缘检测[17 ] 和Hough直线检测[18 ] 确定平行边,进而求解坐标,最后获得透视变换矩阵的参数,其流程如图4 所示. ...
Power line detection based on Hough transform and total least squares method
1
2018
... 由式(6)可知,获得8个参数的值即能确定透视变换矩阵.由于经透视变换后希望获得水平的文本图像,因此需要在倾斜文本图像中获得4个点的坐标,且这些点所围成区域的边应与倾斜文本平行.鉴于标签颜色与背板背景色存在明显差异,且边缘保持水平,可以基于Canny边缘检测[17 ] 和Hough直线检测[18 ] 确定平行边,进而求解坐标,最后获得透视变换矩阵的参数,其流程如图4 所示. ...
基于轻量化YOLOv3和Tesseract OCR的电力设备标志牌识别技术
1
2021
... Tesseract5.0是支持多种语言文字检测的开源光学字符识别引擎[19 ] ,考虑到压板名称一般由专业术语组成,可以基于专业术语构建语料库(图5 ),有针对性地训练文字识别引擎,以提高文本识别的准确率. ...
Electrical sign recognition technology based on simplified YOLOv3 and Tesseract OCR
1
2021
... Tesseract5.0是支持多种语言文字检测的开源光学字符识别引擎[19 ] ,考虑到压板名称一般由专业术语组成,可以基于专业术语构建语料库(图5 ),有针对性地训练文字识别引擎,以提高文本识别的准确率. ...
变电站设备缺陷图像识别的实用化评价方法
1
2021
... 由于在实际应用中,模型需要部署在移动设备(如室内巡检机器人)上,所以模型的大小和运行速度也是不可忽视的[20 ] .评价模型大小可以使用模型文件占用字节数;评价运行速度可以采用每秒检测数(Frames per second,FPS)作为指标. ...
A practical evaluation method for image recognition algorithm of device defects in substations
1
2021
... 由于在实际应用中,模型需要部署在移动设备(如室内巡检机器人)上,所以模型的大小和运行速度也是不可忽视的[20 ] .评价模型大小可以使用模型文件占用字节数;评价运行速度可以采用每秒检测数(Frames per second,FPS)作为指标. ...
A novel lidar data classification algorithm combined densenet with STN
1
2019
... 不同注意力机制模块的性能对比
注意力机制模块 精确率(%) 召回率(%) 平均准确度均值(%) STN[21 ] 81.2 93.3 89.2 SENet[22 ] 83.7 94.1 91.6 CBAM 86.1 97.6 94.1
由表2 可知,对于光反射干扰下的压板图像,采用CBAM模块能获得更好的识别效果,其平均准确度均值较采用STN模块和SENet模块分别提升了4.9%和2.5%,而采用SENet模块则优于采用STN模块.这是由于SENet模块对于通道维度上的光噪声具有抑制能力,优化了特征表达;而CBAM模块融合了通道注意力机制与空间注意力机制,其特征优化效果更为显著. ...
嵌入SENet结构的改进YOLOV3目标识别算法
1
2019
... 不同注意力机制模块的性能对比
注意力机制模块 精确率(%) 召回率(%) 平均准确度均值(%) STN[21 ] 81.2 93.3 89.2 SENet[22 ] 83.7 94.1 91.6 CBAM 86.1 97.6 94.1
由表2 可知,对于光反射干扰下的压板图像,采用CBAM模块能获得更好的识别效果,其平均准确度均值较采用STN模块和SENet模块分别提升了4.9%和2.5%,而采用SENet模块则优于采用STN模块.这是由于SENet模块对于通道维度上的光噪声具有抑制能力,优化了特征表达;而CBAM模块融合了通道注意力机制与空间注意力机制,其特征优化效果更为显著. ...
Improved YOLOV3 target recognition algorithm with embedded SENet structure
1
2019
... 不同注意力机制模块的性能对比
注意力机制模块 精确率(%) 召回率(%) 平均准确度均值(%) STN[21 ] 81.2 93.3 89.2 SENet[22 ] 83.7 94.1 91.6 CBAM 86.1 97.6 94.1
由表2 可知,对于光反射干扰下的压板图像,采用CBAM模块能获得更好的识别效果,其平均准确度均值较采用STN模块和SENet模块分别提升了4.9%和2.5%,而采用SENet模块则优于采用STN模块.这是由于SENet模块对于通道维度上的光噪声具有抑制能力,优化了特征表达;而CBAM模块融合了通道注意力机制与空间注意力机制,其特征优化效果更为显著. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}