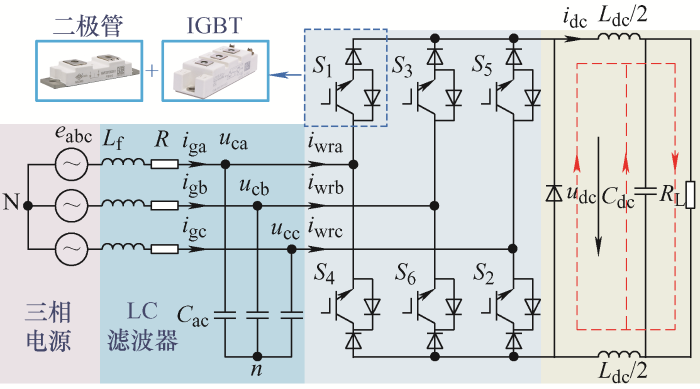
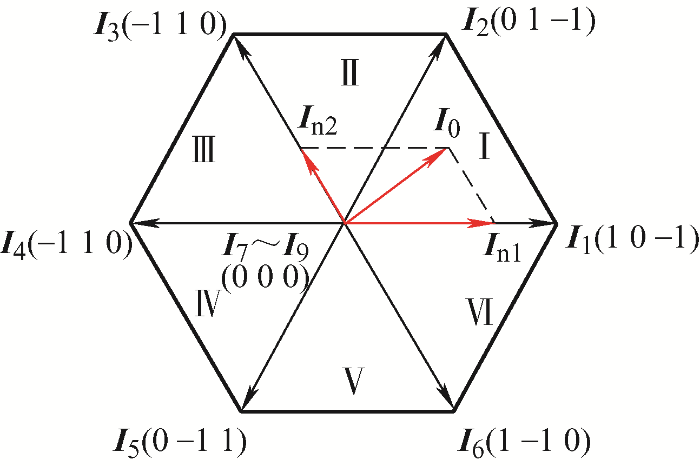
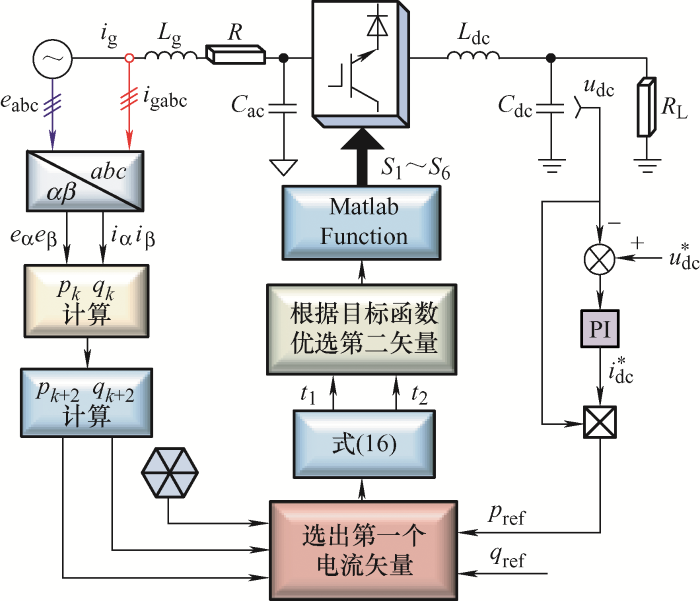
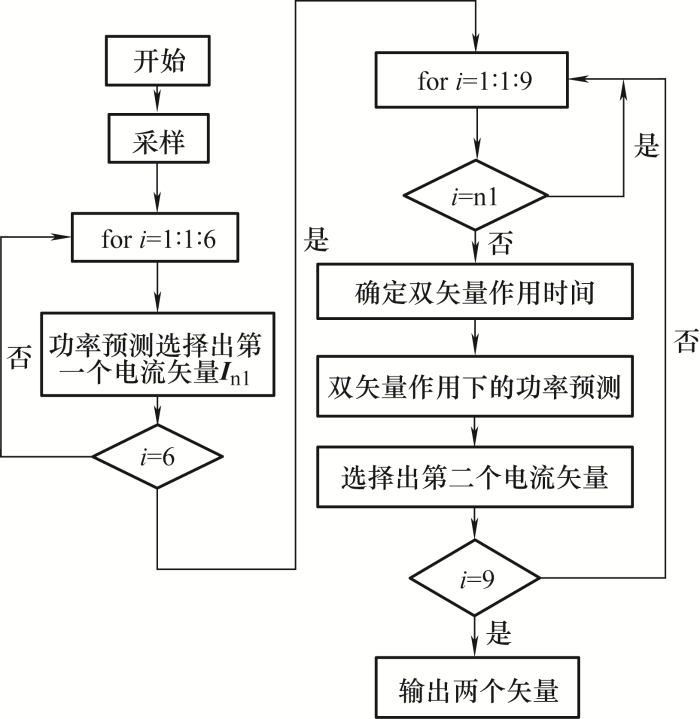
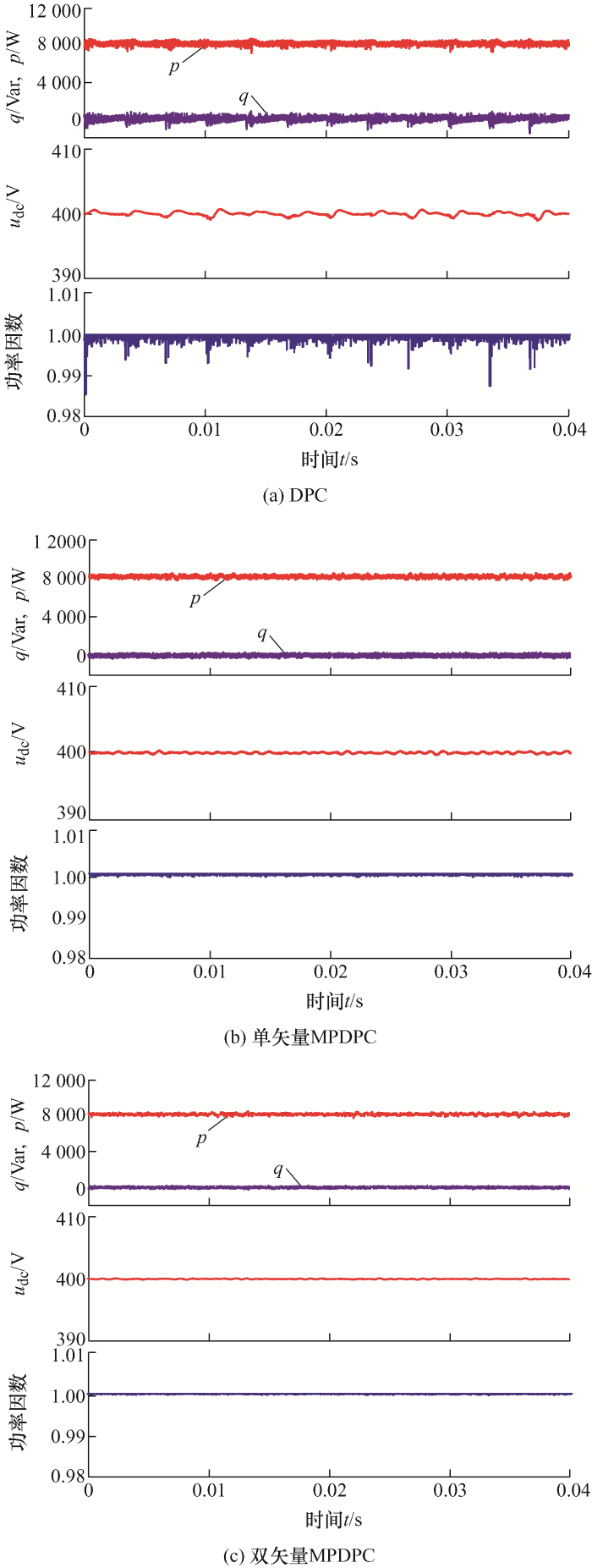
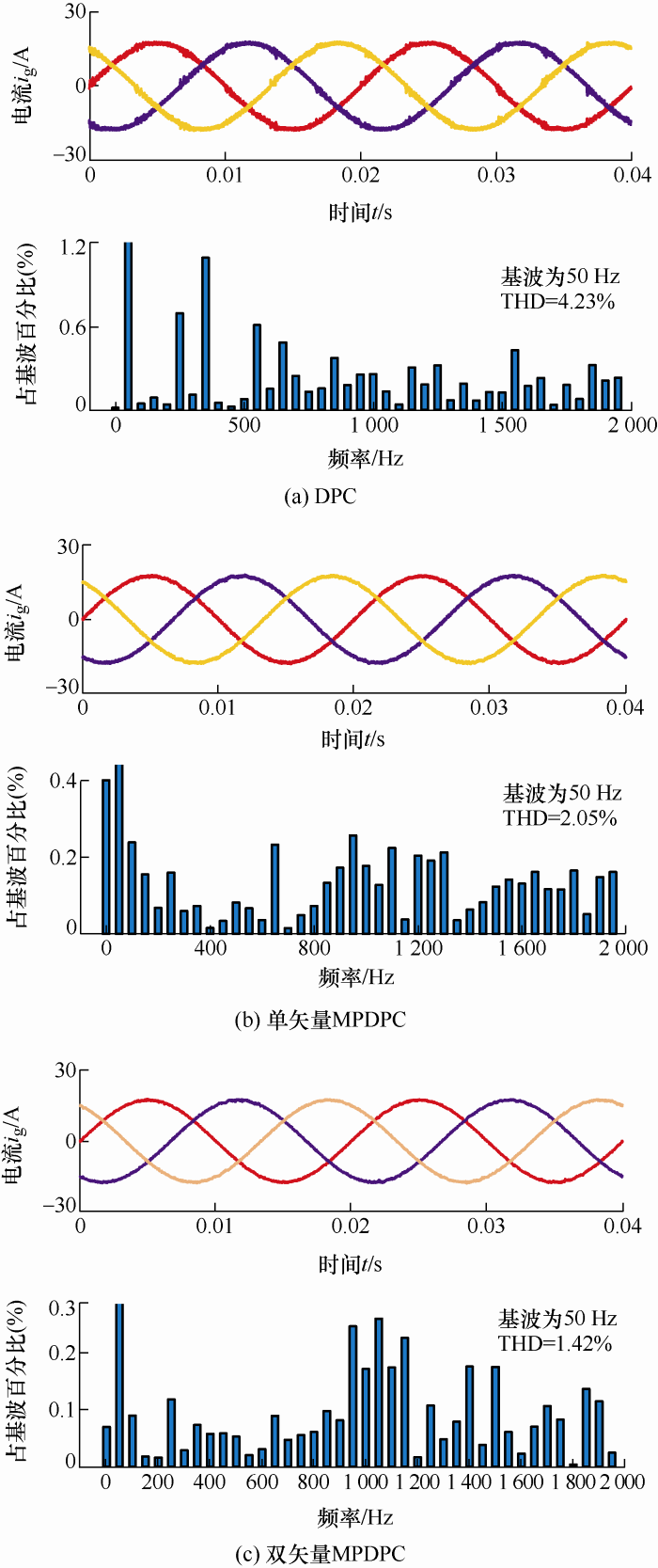
电流源型脉宽调制(Pulse width modulation,PWM)整流器因其网侧存在LC滤波器,系统的控制难度增加。传统直接功率控制策略下的整流器功率波形存在脉动,因模型预测控制具有卓越的动态特性以及直观的控制规律,采用模型预测直接功率控制(Model predictive direct power control,MPDPC)对传统控制策略进行改进。首先建立了三相PWM整流器的数学模型,给出了每个采样周期内的功率变化率,并推导出相邻采样周期之间的功率关系,然后给出基于单矢量的模型预测直接功率控制策略,提出了基于双矢量的模型预测直接功率控制策略,并优选出两个电流矢量,计算在一个采样周期内的作用时间,并对其进行修正。最后,在Matlab/Simulink仿真软件验证了所提控制策略的可行性和有效性。
关键词:电流源型整流器;
模型预测控制;
双矢量;
功率控制
Abstract
Current source pulse width modulation(PWM) rectifier is difficult to control because of LC filter in its network side. The power waveform of rectifier based the traditional direct power control is pulsatile. Model predictive direct power control(MPDPC) is adopted to improve the traditional control strategy because of its excellent dynamic performances and intuitive control law. Firstly, the mathematical model of three-phase PWM rectifier is established, the power change rate in each sampling period is given, and the power relationship between adjacent sampling periods is derived. Then, single-vector-based model predictive direct power control strategy is given, and two-vectors-based model predictive direct power control strategy is proposed. The two current vectors are optimized, and the acting time in one sampling period is calculated and corrected. Finally, the feasibility and effectiveness of the proposed control strategy are verified by Matlab/Simulink.
Keywords:Current source rectifier;
model predictive control;
two-vectors;
power control
WANG Sen, YANG Yi, GUO Qiang, MA Wen, HUANG Yongjun. Two-vectors-based Model Prediction Direct Power Control of Current Source PWM Rectifier[J]. Chinese Journal of Electrical Engineering, 2024, 19(1): 216-225 doi:10.11985/2024.01.023
CSR由于直流侧储能电感较大,网侧电流易畸变等问题,使其结构和控制方法复杂化,CSR的发展受到制约,使得VSR一直作为PWM整流器研究的重点。但随着超导储能、光伏并网、直流充电等领域的发展,CSR将存在更广阔的应用前景。针对CSR已提出多种控制方案,如传统双闭环控制、直接功率控制、滑模控制和模型预测控制[3-4]等。双闭环中的电流环控制可以分为直接电流控制和间接电流控制[5]。直接功率控制(Direct power control,DPC)可以实现直流侧电压电流稳定和网侧单位功率因数运行,具有实现简单、静态特性较好的优势,但由于采用了滞环比较器,且需要开关表进行矢量选择,存在开关频率不固定、网侧电流谐波分布不均匀、网侧功率纹波较大的缺点[6-7]。
近年来模型预测算法由于其卓越的动态特性以及直观的控制规律而被研究者所关注[8]。预测控制根据不同的优化方式和作用方式,可分为连续控制集预测控制(Continuous control set model predictive control,CCS-MPC)和有限控制集预测控制(Finit control set model predictive control,FCS-MPC)[9-10],FCS-MPC通常应用于离散系统。针对传统DPC的缺点,文献[11]提出了模型预测直接功率控制(Model predictive direct power control,MPDPC),其控制方法无需滞环比较器和开关表,稳态及动态性能较好。
为解决传统有限集模型预测电流控制FCS-MPCC(finite-control-set model predictive current control)方法下开关频率不固定和网侧电流谐波大等问题,以单相PWM整流器为研究对象,研究了一种两矢量有限集模型预测电流控制TV-FCS-MPCC(two-vector-based finite-control-set model predictive current control)方法。该方法根据整流器的3种电压矢量进行扇区划分,并在每个开关周期内同时作用一个扇区内的2个边界矢量;结合电流误差评价函数,求解出各扇区边界电压矢量的最优作用时间;最后采用电流误差评价函数值最小的扇区边界矢量,并通过调制模块产生相应开关信号。为验证所提方法的正确性和有效性,在小功率实验平台上对该TV-FCS-MPCC与传统FCS-MPCC方法进行了实验对比研究,研究结果表明:TV-FCS-MPCC方法可以有效实现单相PWM整流器的控制目标,与传统FCS-MPCC方法相比,所提方法可以实现开关频率的固定,并降低网侧电流THD。
HANKun, CHENJinhui, LIGuihu, et al.
Two-vector-based finite-control-set model predictive current control of single-phase PWM converter
A two-vector-based finite-control-set model predictive current control (TV-FCS-MPCC) method is studied to deal with the drawbacks of inconstant switching frequency and large harmonic in grid current when the traditional finite-control-set model predictive current control (FCS-MPCC) method is applied to single-phase pulse width modulation (PWM) rectifiers. In this method, several sectors are divided according to the three kinds of voltage vector of the rectifier, and two boundary vectors within one sector are taken during each switching period. Then, the current error evaluation function is combined to calculate the optimal boundary voltage vector duration for each sector. Finally, the boundary voltage vectors which can minimize the current error evaluation function are adopted, and the corresponding switching signals are generated via a modulator. To verify the correctness and effectiveness of the proposed method, TV-FCS-MPCC and the traditional FCS-MPCC method were experimentally compared on a scale-down experimental platform, and results show that TV-FCS-MPCC can realize the control objectives of single-phase PWM rectifiers effectively. Compared with the traditional FCS-MPCC method, it can fix the switching frequency and lower the THD of grid current.
SUNQiuye, LIYuyang, MADazhong, et al.
Model predictive direct power control of three-port solid-state transformer for hybrid AC/DC zonal microgrid applications
[J]. IEEE Transactions on Power Delivery, 2022, 37(1):528-538.
Conventional model predictive current control (MPCC) applies only one vector during one control period, which produces large torque and flux ripples and high current harmonics in permanent magnet synchronous motor (PMSM) drives. Recently MPCC with duty cycle control has been proposed to improve the steady state performance by applying one non-zero vector and one null vector during one control period. However, the prior method requires lots of calculations and predictions to find the optimal voltage vectors and calculate their respective duration. Different from prior enumeration-based MPCC, this paper proposes an efficient two-vector MPCC by applying two arbitrary voltage vectors during one control period. The reference voltage vector is firstly calculated based on the principle of deadbeat current control. Two optimal vectors and their duration are then obtained in a very efficient way, which does not require the calculation of current slopes in prior MPCC methods. The proposed method is compared to the state-of-the-art predictive control methods, including conventional MPCC, MPCC with duty cycle control, deadbeat control with space vector modulation (SVM) and modulated model predictive control (M2PC). Both simulation and experimental results prove that the proposed method achieves better steady state performance than conventional MPCC with or without duty cycle and the dynamic response is not degraded. Under the condition of insufficient dc bus voltage, the proposed method outperforms deadbeat control and M2PC by presenting even higher speed range and less torque ripples.
ZHANGXiaoguang, HOUBenshuai.
Double vectors model predictive torque control without weighting factor based on voltage tracking error
[J]. IEEE Transactions on Power Electronics, 2018, 33(3):2368-2380.
... CSR由于直流侧储能电感较大,网侧电流易畸变等问题,使其结构和控制方法复杂化,CSR的发展受到制约,使得VSR一直作为PWM整流器研究的重点.但随着超导储能、光伏并网、直流充电等领域的发展,CSR将存在更广阔的应用前景.针对CSR已提出多种控制方案,如传统双闭环控制、直接功率控制、滑模控制和模型预测控制[3-4]等.双闭环中的电流环控制可以分为直接电流控制和间接电流控制[5].直接功率控制(Direct power control,DPC)可以实现直流侧电压电流稳定和网侧单位功率因数运行,具有实现简单、静态特性较好的优势,但由于采用了滞环比较器,且需要开关表进行矢量选择,存在开关频率不固定、网侧电流谐波分布不均匀、网侧功率纹波较大的缺点[6-7]. ...
Model predictive current control of single-phase PWM rectifiers with elliptic trajectory optimization of the modulated voltage vector
1
2018
... CSR由于直流侧储能电感较大,网侧电流易畸变等问题,使其结构和控制方法复杂化,CSR的发展受到制约,使得VSR一直作为PWM整流器研究的重点.但随着超导储能、光伏并网、直流充电等领域的发展,CSR将存在更广阔的应用前景.针对CSR已提出多种控制方案,如传统双闭环控制、直接功率控制、滑模控制和模型预测控制[3-4]等.双闭环中的电流环控制可以分为直接电流控制和间接电流控制[5].直接功率控制(Direct power control,DPC)可以实现直流侧电压电流稳定和网侧单位功率因数运行,具有实现简单、静态特性较好的优势,但由于采用了滞环比较器,且需要开关表进行矢量选择,存在开关频率不固定、网侧电流谐波分布不均匀、网侧功率纹波较大的缺点[6-7]. ...
基于自适应神经网络观测的无电压传感器PWM整流器功率预测控制
1
2021
... CSR由于直流侧储能电感较大,网侧电流易畸变等问题,使其结构和控制方法复杂化,CSR的发展受到制约,使得VSR一直作为PWM整流器研究的重点.但随着超导储能、光伏并网、直流充电等领域的发展,CSR将存在更广阔的应用前景.针对CSR已提出多种控制方案,如传统双闭环控制、直接功率控制、滑模控制和模型预测控制[3-4]等.双闭环中的电流环控制可以分为直接电流控制和间接电流控制[5].直接功率控制(Direct power control,DPC)可以实现直流侧电压电流稳定和网侧单位功率因数运行,具有实现简单、静态特性较好的优势,但由于采用了滞环比较器,且需要开关表进行矢量选择,存在开关频率不固定、网侧电流谐波分布不均匀、网侧功率纹波较大的缺点[6-7]. ...
Voltage-sensorless model predictive power control of PWM rectifier based on adaptive neural network observation
1
2021
... CSR由于直流侧储能电感较大,网侧电流易畸变等问题,使其结构和控制方法复杂化,CSR的发展受到制约,使得VSR一直作为PWM整流器研究的重点.但随着超导储能、光伏并网、直流充电等领域的发展,CSR将存在更广阔的应用前景.针对CSR已提出多种控制方案,如传统双闭环控制、直接功率控制、滑模控制和模型预测控制[3-4]等.双闭环中的电流环控制可以分为直接电流控制和间接电流控制[5].直接功率控制(Direct power control,DPC)可以实现直流侧电压电流稳定和网侧单位功率因数运行,具有实现简单、静态特性较好的优势,但由于采用了滞环比较器,且需要开关表进行矢量选择,存在开关频率不固定、网侧电流谐波分布不均匀、网侧功率纹波较大的缺点[6-7]. ...
静止坐标系下电流型PWM整流器电流环控制策略研究及其参数设计
1
2014
... CSR由于直流侧储能电感较大,网侧电流易畸变等问题,使其结构和控制方法复杂化,CSR的发展受到制约,使得VSR一直作为PWM整流器研究的重点.但随着超导储能、光伏并网、直流充电等领域的发展,CSR将存在更广阔的应用前景.针对CSR已提出多种控制方案,如传统双闭环控制、直接功率控制、滑模控制和模型预测控制[3-4]等.双闭环中的电流环控制可以分为直接电流控制和间接电流控制[5].直接功率控制(Direct power control,DPC)可以实现直流侧电压电流稳定和网侧单位功率因数运行,具有实现简单、静态特性较好的优势,但由于采用了滞环比较器,且需要开关表进行矢量选择,存在开关频率不固定、网侧电流谐波分布不均匀、网侧功率纹波较大的缺点[6-7]. ...
A novel control strategy and its parameter design of the current-loop in a stationary frame for current-source PWM rectifiers
1
2014
... CSR由于直流侧储能电感较大,网侧电流易畸变等问题,使其结构和控制方法复杂化,CSR的发展受到制约,使得VSR一直作为PWM整流器研究的重点.但随着超导储能、光伏并网、直流充电等领域的发展,CSR将存在更广阔的应用前景.针对CSR已提出多种控制方案,如传统双闭环控制、直接功率控制、滑模控制和模型预测控制[3-4]等.双闭环中的电流环控制可以分为直接电流控制和间接电流控制[5].直接功率控制(Direct power control,DPC)可以实现直流侧电压电流稳定和网侧单位功率因数运行,具有实现简单、静态特性较好的优势,但由于采用了滞环比较器,且需要开关表进行矢量选择,存在开关频率不固定、网侧电流谐波分布不均匀、网侧功率纹波较大的缺点[6-7]. ...
Direct power control based on natural switching surface for three-phase PWM rectifiers
1
2015
... CSR由于直流侧储能电感较大,网侧电流易畸变等问题,使其结构和控制方法复杂化,CSR的发展受到制约,使得VSR一直作为PWM整流器研究的重点.但随着超导储能、光伏并网、直流充电等领域的发展,CSR将存在更广阔的应用前景.针对CSR已提出多种控制方案,如传统双闭环控制、直接功率控制、滑模控制和模型预测控制[3-4]等.双闭环中的电流环控制可以分为直接电流控制和间接电流控制[5].直接功率控制(Direct power control,DPC)可以实现直流侧电压电流稳定和网侧单位功率因数运行,具有实现简单、静态特性较好的优势,但由于采用了滞环比较器,且需要开关表进行矢量选择,存在开关频率不固定、网侧电流谐波分布不均匀、网侧功率纹波较大的缺点[6-7]. ...
A model-based direct power control for three-phase power converters
1
2008
... CSR由于直流侧储能电感较大,网侧电流易畸变等问题,使其结构和控制方法复杂化,CSR的发展受到制约,使得VSR一直作为PWM整流器研究的重点.但随着超导储能、光伏并网、直流充电等领域的发展,CSR将存在更广阔的应用前景.针对CSR已提出多种控制方案,如传统双闭环控制、直接功率控制、滑模控制和模型预测控制[3-4]等.双闭环中的电流环控制可以分为直接电流控制和间接电流控制[5].直接功率控制(Direct power control,DPC)可以实现直流侧电压电流稳定和网侧单位功率因数运行,具有实现简单、静态特性较好的优势,但由于采用了滞环比较器,且需要开关表进行矢量选择,存在开关频率不固定、网侧电流谐波分布不均匀、网侧功率纹波较大的缺点[6-7]. ...
A model predictive power factor control scheme with active damping function for current source rectifiers
1
2017
... 近年来模型预测算法由于其卓越的动态特性以及直观的控制规律而被研究者所关注[8].预测控制根据不同的优化方式和作用方式,可分为连续控制集预测控制(Continuous control set model predictive control,CCS-MPC)和有限控制集预测控制(Finit control set model predictive control,FCS-MPC)[9-10],FCS-MPC通常应用于离散系统.针对传统DPC的缺点,文献[11]提出了模型预测直接功率控制(Model predictive direct power control,MPDPC),其控制方法无需滞环比较器和开关表,稳态及动态性能较好. ...
交流电机模型预测控制策略发展概述
1
2021
... 近年来模型预测算法由于其卓越的动态特性以及直观的控制规律而被研究者所关注[8].预测控制根据不同的优化方式和作用方式,可分为连续控制集预测控制(Continuous control set model predictive control,CCS-MPC)和有限控制集预测控制(Finit control set model predictive control,FCS-MPC)[9-10],FCS-MPC通常应用于离散系统.针对传统DPC的缺点,文献[11]提出了模型预测直接功率控制(Model predictive direct power control,MPDPC),其控制方法无需滞环比较器和开关表,稳态及动态性能较好. ...
Development of AC motor model predictive control strategy:An overview
1
2021
... 近年来模型预测算法由于其卓越的动态特性以及直观的控制规律而被研究者所关注[8].预测控制根据不同的优化方式和作用方式,可分为连续控制集预测控制(Continuous control set model predictive control,CCS-MPC)和有限控制集预测控制(Finit control set model predictive control,FCS-MPC)[9-10],FCS-MPC通常应用于离散系统.针对传统DPC的缺点,文献[11]提出了模型预测直接功率控制(Model predictive direct power control,MPDPC),其控制方法无需滞环比较器和开关表,稳态及动态性能较好. ...
单相PWM整流器两矢量有限集模型预测电流控制
1
2021
... 近年来模型预测算法由于其卓越的动态特性以及直观的控制规律而被研究者所关注[8].预测控制根据不同的优化方式和作用方式,可分为连续控制集预测控制(Continuous control set model predictive control,CCS-MPC)和有限控制集预测控制(Finit control set model predictive control,FCS-MPC)[9-10],FCS-MPC通常应用于离散系统.针对传统DPC的缺点,文献[11]提出了模型预测直接功率控制(Model predictive direct power control,MPDPC),其控制方法无需滞环比较器和开关表,稳态及动态性能较好. ...
Two-vector-based finite-control-set model predictive current control of single-phase PWM converter
1
2021
... 近年来模型预测算法由于其卓越的动态特性以及直观的控制规律而被研究者所关注[8].预测控制根据不同的优化方式和作用方式,可分为连续控制集预测控制(Continuous control set model predictive control,CCS-MPC)和有限控制集预测控制(Finit control set model predictive control,FCS-MPC)[9-10],FCS-MPC通常应用于离散系统.针对传统DPC的缺点,文献[11]提出了模型预测直接功率控制(Model predictive direct power control,MPDPC),其控制方法无需滞环比较器和开关表,稳态及动态性能较好. ...
Model predictive direct power control of three-port solid-state transformer for hybrid AC/DC zonal microgrid applications
1
2022
... 近年来模型预测算法由于其卓越的动态特性以及直观的控制规律而被研究者所关注[8].预测控制根据不同的优化方式和作用方式,可分为连续控制集预测控制(Continuous control set model predictive control,CCS-MPC)和有限控制集预测控制(Finit control set model predictive control,FCS-MPC)[9-10],FCS-MPC通常应用于离散系统.针对传统DPC的缺点,文献[11]提出了模型预测直接功率控制(Model predictive direct power control,MPDPC),其控制方法无需滞环比较器和开关表,稳态及动态性能较好. ...
Dynamic performance improvement of AC/DC converter using model predictive direct power control with finite control set




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}