

1 引言
目前已有许多的控制策略应用在整流器上,如电压定向矢量控制(Voltage oriented control, VOC)、自抗扰控制(Active disturbance rejection control, ADRC)、滑模变结构控制(Sliding mode control, SMC)和模型预测控制(Model predictive control, MPC)等都得到了广泛的研究。文献[10]对电压矢量控制进行了研究,通过坐标变换建立数学模型设计了双闭环PI控制,验证了算法的可行性,但PI控制的参数整定困难,对于外部干扰不能快速地跟踪难以达到较好的控制效果。文献[11]提出了预测直接功率控制,针对功率跟踪偏差问题设计了优化模型,并使用空间矢量调制实现定频率控制。文献[12]针对数字处理延迟问题,设计两步预测消除延迟,同时设计了消除功率偏差校正环节和无网压传感器算法减少了耗费成本。文献[13]结合预测控制算法提出改进滑模控制和死拍预测直接功率控制的复合算法,提高了系统的响应速度和抗干扰的能力。文献[14-15]针对外部干扰设计了线性自抗扰控制,利用观测器进行扰动补偿提升了系统鲁棒性。文献[16]针对脉冲负载设计了自适应自抗扰控制,通过自适应与自抗扰结合对其参数调节,提高了系统的动态响应速度,降低了稳态时网侧电流谐波,但自抗扰控制器参数较多,参数整定较为困难。文献[17]提出了高阶积分端末滑模控制和高阶滑模趋近律,有效降低了系统稳态误差和滑模面的抖振。文献[18]提出了滑模观测器和滑模控制结合的控制策略,提高了整流器直流电压抗干扰能力和运行时网侧电流的稳定性,使其能在多工况下正常运行。文献[19]针对五电平整流器的传统模型预测动态性能差的问题,提出滑模模型预测控制,提升了整流器动态响应速度和抗干扰性能。文献[20]针对传统模型预测功率控制的预测目标不精确,存在电压波动较大的问题,提出了优化模型预测功率,同时电压外环采用自适应模糊控制,优化后显著提升了系统的稳态性能和动态抗干扰性,但是该控制策略的算法较复杂,计算量大,实用比较困难。
综上所述,针对传统模型预测PI控制(Model predictive PI control, MPPIC)存在寻优过程计算复杂、动态响应速度较慢、抗干扰的能力较差等问题,本文设计了优化的模型预测控制和滑模变结构控制相结合的模型预测滑模控制(Model predictive sliding mode control, MPSMC)算法。首先,通过对三相电压型PWM整流器的拓扑原理分析,得出了其控制数学模型。然后,针对传统有限集模型预测控制的遍历寻优计算复杂的问题,采用无差拍控制原理简化了模型预测寻优次数。之后,针对传统PI控制动态响应较慢、抗干扰能力较差的问题,外环设计了快速幂次趋近率的积分滑模控制。最后,对提出的MPSMC和传统的MPPIC进行了仿真和试验对比,验证了所提算法的可行性和有效性。
2 三相电压型PWM整流器数学模型
图1
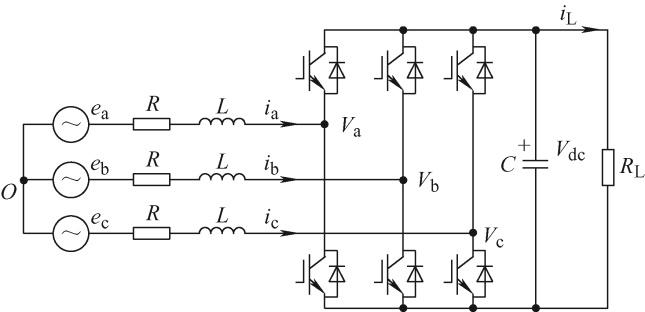
由基尔霍夫电压定律和电流定律,建立每相回路方程,得到三相电压型PWM整流器的数学模型,其表达式为
式中,iL为负载电流;Sa、Sb和Sc分别为开关的开关状态。
为了便于分析,将开关的状态定义为开关函数
式中,k代表a,b,c相。
通过坐标变换将三相的开关状态转换到两相静止坐标系中
将三相VSR的数学模型转换到两相静止坐标系中
式中,eαβ为电网电压矢量;iαβ、Vαβ分别为输入电流矢量和电压矢量。
结合上述分析,三相VSR的动态模型用αβ轴分量表示为
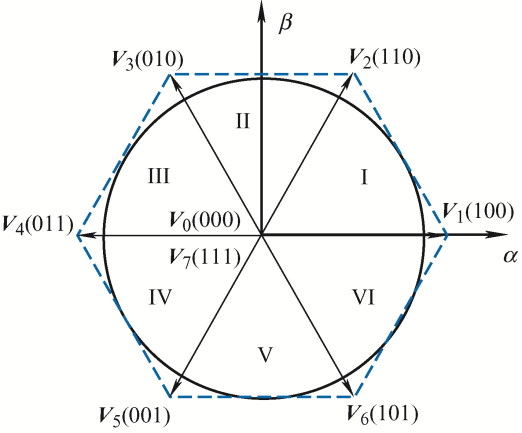
由空间电压矢量原理可得,输入电压矢量可由固定的αβ轴坐标系上的8条电压空间矢量表示,如图2所示。其中V0与V7为零电压矢量。
图2
3 模型预测控制器的设计
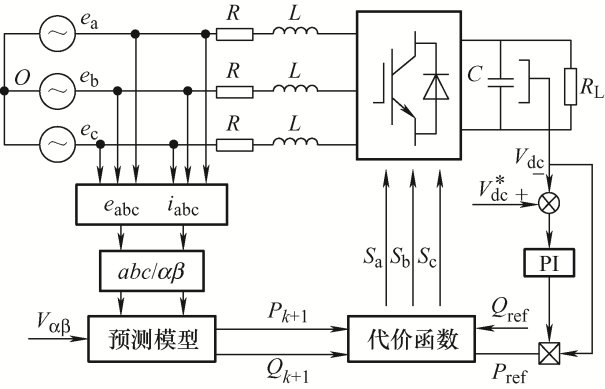
3.1 整流系统结构框图
如图3所示为模型预测PI双闭环控制系统的结构图。外环PI控制得到有功功率参考值,为了实现单位功率因素运行,无功功率设置为0 Var。内环输入两相静止坐标系下的电压Vαβ、电流iαβ,通过三相电压型整流器的离散预测模型,预测计算出8条电压矢量作用下的输入功率,通过代价函数选择最优的开关状态作为下一时刻功率变换器的控制信号。
图3
3.2 模型预测控制器
预测控制可以实现输出电压控制,还能控制有功功率和无功功率控制达到期望值。设系统采样时间为Ts,在k+1时刻,网侧电流的离散模型可表示为
由此,可以计算出系统的有功功率和无功功率
控制有功功率和无功功率,建立成本函数
式中,Pref、Qref分别为有功功率和无功功率参考值。
传统的有限集模型预测控制通过遍历寻优,每个控制周期会对8个电压矢量进行比较选取最优电压矢量,然后输出其对应的开关序列控制IGBT工作。这种方式寻优准确度较高,但需要计算8个电压失量对应的电流进行功率计算寻优比较,计算量较大,控制效果较差。为了减少寻优次数,本文设计了优化的模型预测控制算法,将每个控制周期8次寻优减少到3次,提高了系统稳态性能。
由无差拍控制理论可得,本文目标控制有功功率和无功功率误差值最小。设有功功率和无功功率误差为零,即有
将式(8)、(9)代入式(11)可得
式中,
如表1所示,每一个扇区都由两个非零电压矢量和一个零电压矢量合成,将最优电压矢量与所在扇区相邻的两个非零电压矢量和零电压矢量代入代价函数
式中,Vα*、Vβ*分别为α、β轴上的最优电压参考值。通过代价函数可以选取出该扇区最接近参考电压矢量的最优电压矢量,然后输出对应的开关序列。
表1 扇区和电压矢量关系表
| 扇区 | 非零电压矢量 | 零电压矢量 |
|---|---|---|
| Ⅰ | V1(100)、V2(110) | V0(000)/V7(111) |
| Ⅱ | V2(110)、V3(010) | V0(000)/V7(111) |
| Ⅲ | V3(010)、V4(011) | V0(000)/V7(111) |
| Ⅳ | V4(011)、V5(001) | V0(000)/V7(111) |
| Ⅴ | V5(001)、V6(101) | V0(000)/V7(111) |
| Ⅵ | V6(101)、V1(100) | V0(000)/V7(111) |
4 滑模控制器设计
4.1 滑模控制律设计
如图3所示,传统的控制系统外环有功功率参考值由PI控制器得出,PI为线性控制策略,当系统参数和运行状态变化时,系统的动态性能跟踪速度比较缓慢。相对而言,滑模控制更符合非线性系统,因控制器到达滑模面后对系统参数不太敏感而具有较强鲁棒性,动态性能较好。因此为了提高系统的动态性能,将外环改用滑模控制器。
由图1所示三相电压型PWM整流电路原理图,建立直流侧瞬时功率方程
根据功率守恒定律,整流器的输入瞬时功率等于输出瞬时功率。为便于分析,本文忽略整流器的功率损耗。
为了实现输出电压跟踪期望电压值,跟踪误差e可表示为
为了使控制稳态误差为零,根据滑模变结构控制原理,设计了电压误差的比例积分滑模面
式中,c1>0,c2>0,对滑模面求导将式(15)代入得
为了改善系统到达滑动模态的性能,采用快速幂次趋近律来设计电压外环控制器,即
式中,k1>0,k2>0,0<α<1,sgn为符号函数,通过α值的调整,可以保证当系统状态远离滑模面时,能够较快地趋近于滑动模态,当系统状态趋近滑模面时,保证较小的控制增益,以达到较小抖振的效果。
由式(15)、式(18)和式(19)可得
进一步转化得
通过上式得出了滑模控制器的控制律和参考功率Pref。考虑到三相整流器实际复杂工况,采用饱和函数sat(s)代替不连续的sgn(s)符号函数以削弱抖振。
式中,Δ为边界层厚度且Δ>0,替换开关函数后可将式(21)改写为
4.2 滑模存在条件证明
滑模存在条件是设计滑模控制的前提,为了保证滑模面附进的轨迹点都能在有限的时间到达滑模面,对其滑模的存在条件证明。
选取李雅普诺夫函数为
对式(24)求导并将式(19)代入,可得
如果到达点在所创建开关面的领域中处于正位置,即s>0。则有
如果到达点在所创建开关面的领域中处于负位置,即s<0。则有
由式(27)和式(29)可以得出结论,满足滑模的存在条件。
5 仿真及实物试验验证
5.1 仿真结果与分析
为了验证三相电压型PWM整流器模型预测滑模控制策略的有效性,通过Matlab/Simulink搭建了仿真平台,其所用参数如表2所示。
表2 三相电压型PWM整流器的参数
| 参数 | 数值 |
|---|---|
| 直流输出电压Vdc/V | 600 |
| 交流输入电压e/V | 220 |
| 交流侧等效电阻R/Ω | 0.1 |
| 直流侧负载RL/Ω | 40 |
| 滤波电感L/mH | 5 |
| 滤波电容C/μF | 3 100 |
| 采样周期TS/μs | 50 |
图4为启动响应直流电压波形,两种控制方法都能将输出电压控制到参考值,其中MPPIC输出电压在48 ms到达给定稳态值,而MPSMC输出电压到达给定稳态值的速度较MPPIC快很多,仅用了20 ms。MPSMC输出电压到达给定稳态值的过程比较平滑且几乎没有出现电压超调,而MPPIC输出电压到达给定稳态值的过程中存在18 V的电压超调。
图4
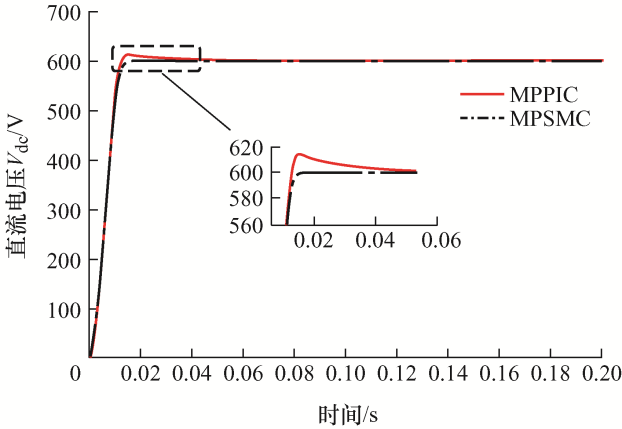
图5
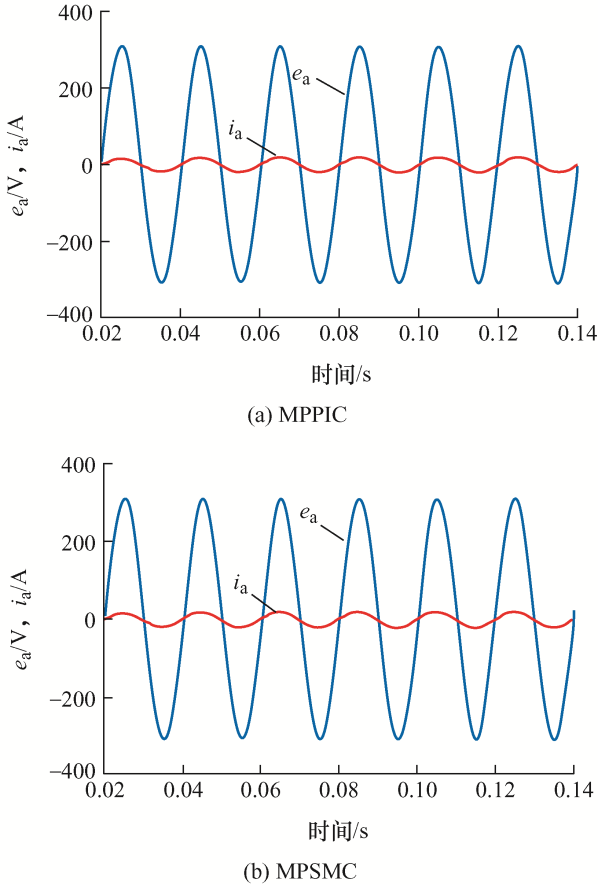
图6
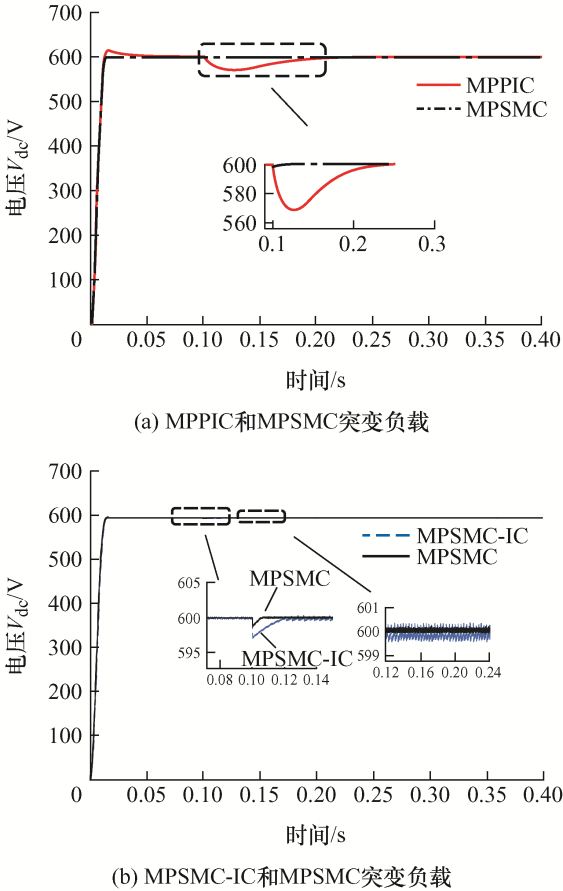
当系统运行到0.1 s时突变负载,将直流侧负载电阻从40 Ω突减到20 Ω,图7为突变负载直流电压波形,图7a中MPPIC和MPSMC的直流电压都有跌落,然后在有限时间内又恢复到给定参考值,其中MPPIC的恢复时间约为120 ms,电压跌落约为36 V,而MPSMC的恢复时间约为14 ms,电压跌落约为2.2 V。可以看出MPSMC具有较强的抗负载扰动性能,能更快跟踪负载的突变。同时为了验证本文提出的外环滑模的控制性能,将外环采样指数趋近律滑模的MPSMC-IC和MPSMC进行对比,图7b中MPSMC-IC负载突变电压的恢复时间为22 ms,但电压跌落为3.8 V,MPSMC的恢复时间约为14 ms,电压跌落约为2.2 V;MPSMC静态误差和抖振幅度较MPSMC-IC更小,可以看出MPSMC的外环滑模降低了静态误差,减小了系统的抖振。
图7
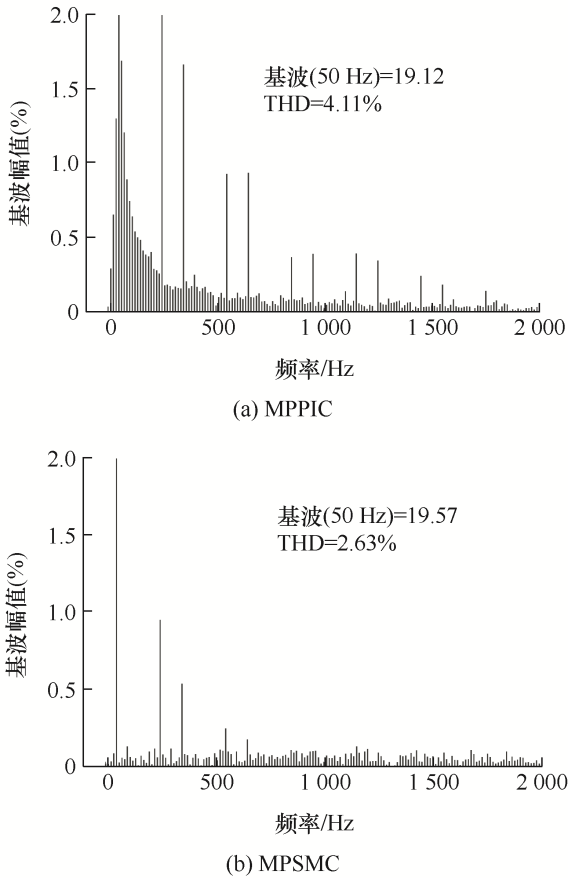
综上所述,MPSMC和MPPIC都能控制整流器单位功率因数运行,MPSMC减少了电流谐波,具有更好的稳态性能;在启动响应和突变负载响应时,MPSMC较MPPIC具有更快的跟踪速度和更强的抗负载干扰等特性,提高了整流器的运行性能,为后续进行实物控制设计提供了理论依据。
5.2 实物试验结果与分析
为了验证设计的MPSMC算法的可行性,基于以上理论分析搭建了小功率的三相整流器的试验平台。DSP采用德州仪器(TI)公司的TMS320F28335处理芯片,IGBT采用安森美公司的FGH40N60UFD型号。由于试验条件受限,实物参数设计如下:交流输入电压幅值为40 V,直流侧输出电压为150 V,滤波电容和电感和仿真参数保持一致,直流侧负载为75~150 Ω,采样周期为50 μs。
图8为启动响应直流电压波形,整流器由不控整流状态然后启动控制器,电压到达给定参考电压。可以看出MPPIC和MPSMC到达稳态电压的时间分别为400 ms和200 ms,MPPIC存在8 V电压过冲,MPSMC的启动速度更快,电压更为平滑且未出现过冲现象。
图8
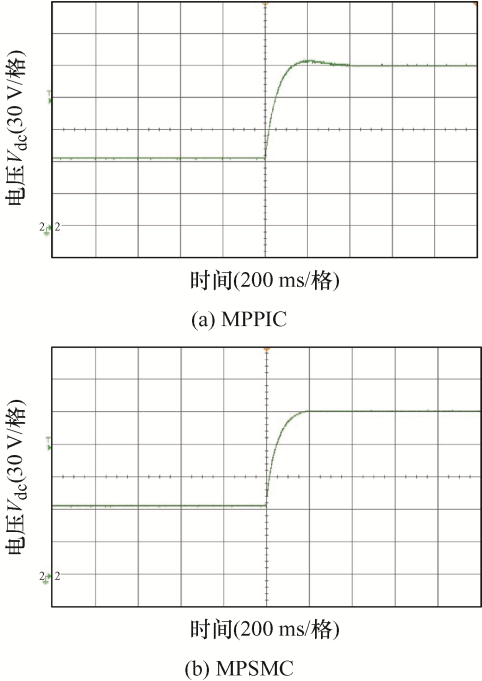
图9为整流器稳态运行时网侧相电压电流波形,可以看出两种控制下电压和电流相位保持一致,波形均为正弦波,都实现了单位功率因素运行,其中MPSMC的电流波形更加平滑。
图9
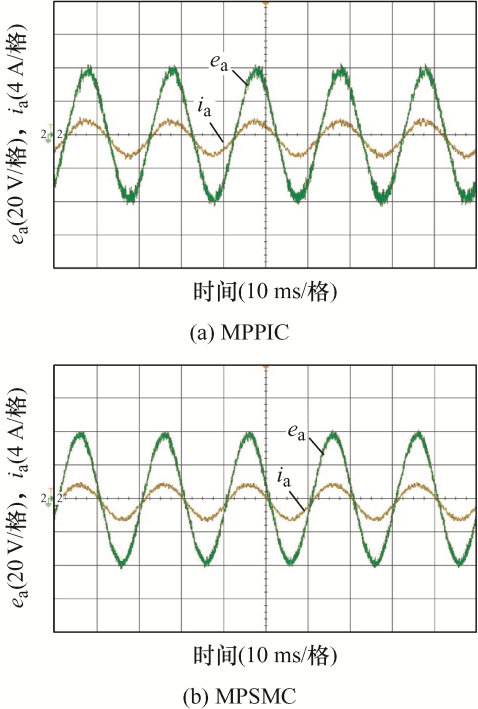
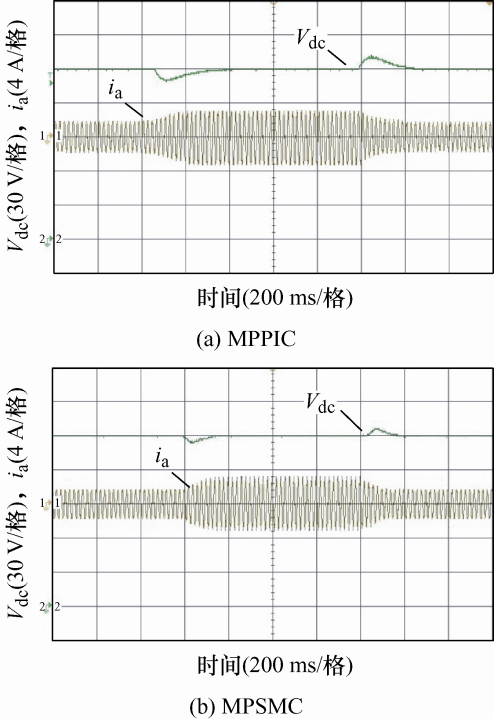
图10为负载突变试验波形,直流负载电阻首先由150 Ω跳变为75 Ω然后又跳变为150 Ω,采用MPPIC策略时,负载突减后直流电压经过320 ms电压跌落后重新回到给定电压值,负载突增后直流电压经过300 ms电压超调后恢复到给定电压值。采用MPSMC策略时,负载突减后直流电压经过120 ms电压跌落后重新回到给定电压值,负载突增后直流电压经过120 ms电压超调后恢复到给定电压值。验证了MPSMC在负载突变时具有更好的抗干扰能力。
图10
6 结论
针对传统的模型预测控制寻优过程复杂,导致静态性能较差;外环的PI控制不能快速跟踪系统状态变化,导致抗干扰能力较差等问题,提出了MPSMC控制策略。该方法将模型预测控制和滑模控制结合,极大地提高了三相电压型PWM整流器的控制性能。仿真和试验表明,与传统模型预测控制策略相比,本文所提控制策略具有以下特点。
(1) 简化了寻优次数,提升了系统稳态性能,降低了网侧的电流谐波,实现了单位功率因数运行。
(2) 采用外环积分滑模控制器的设计,系统能够更快地跟踪动态变化,提升了系统的抗干扰能力。
参考文献
中国实现2030年前碳达峰目标及主要途径
[J].
China’s goal of achieving carbon peak by 2030 and its main approaches
[J].
A novel three-vector-based model predictive direct power control for three-phase PWM rectifier
[J].
DOI:10.3390/electronics10212579
URL
[本文引用: 1]

A novel strategy of three-vector-based model predictive direct power control (MPDPC) is proposed for three-phase Pulse-width Modulation (PWM) rectifier. Under ideal grid conditions, three-vector MPDPC is studied, and a good control effect has been achieved. However, under the unbalanced power grid condition, the traditional control strategy has some problems, such as a high harmonic content of current and large instantaneous power pulsation. A new three-vector model predictive control is proposed based on the new instantaneous power theory, and the objective function is established by instantaneous power error. The duty cycle of the selected vector is calculated by solving the optimal objective function. Under an unbalanced power grid, this paper takes a three-phase PWM rectifier as a research object, and carries out simulation and experimental tests on the traditional and new control strategies. The experimental results show that the new control strategy has lower current harmonics, and eliminates the twice grid-frequency oscillation of the grid in instantaneous power.
电压型PWM整流器控制现状及发展趋势分析
[J].
Analysis of control status and development trend of voltage source PWM rectifier
[J].
Disturbance observer-based finite-time control for three-phase AC/DC converter
[J].DOI:10.1109/TIE.2021.3088358 URL [本文引用: 1]
适用于电动汽车充放电功能的虚拟同步机技术的研究
[J].
Research on virtual synchronous machine technology for electricvehicle charging and discharging function
[J].
Open-circuit fault-tolerant control for outer switches of three-level rectifiers in wind turbine systems
[J].DOI:10.1109/TPEL.2015.2464803 URL [本文引用: 1]
DC grid interface for the integrated generator:Rectifier architecture in wind energy systems
[J].DOI:10.1109/TPEL.2022.3197081 URL [本文引用: 1]
An improved three-phase buck rectifier with low voltage stress on switching devices
[J].DOI:10.1109/TPEL.63 URL [本文引用: 1]
一种通用的PWM变流器开关脉冲延时补偿策略
[J].
A general switch pulse delay compensation strategy for PWM converter
[J],
双闭环矢量控制的电压型PWM整流器参数整定
[J].
Parameter setting for double closed-loop vector control of voltage source PWM rectifier
[J].
三相电压型PWM整流器预测功率控制研究
[J].
DOI:10.13234/j.issn.2095-2805.2017.5.123
[本文引用: 1]
提出一种基于功率预测的三相电压型PWM整流器(VSR)直接功率控制。对三相VSR进行分析,建立两相静止坐标系下的数学模型,在瞬时功率理论的基础上建立功率的预测模型,以功率跟踪误差为目标函数来选择合适的交流电压矢量,针对功率跟踪存在的稳态偏差采取误差反馈校正以优化模型、提高精度,然后采用空间矢量调制实现恒定的开关频率,并通过估算电网电压实现无电压传感器,可以有效节省系统成本、提高系统鲁棒性。进行了详细的理论推导和仿真分析,其仿真结果验证了该方法的可行性和有效性。
Research on predictive power control of three-phase voltage source PWM rectifier
[J].
DOI:10.13234/j.issn.2095-2805.2017.5.123
[本文引用: 1]
This paper proposes a direct power control for three-phase voltage source PWM rectifier(VSR) based on power prediction. The three-phase VSR is analyzed and the mathematical model under the two-phase stationary coordinate system is established. Based on the instantaneous power theory, the power prediction model is established. The power tracking error is used as the objective function to select the appropriate AC voltage vector. The error feedback correction is used to optimize the model and improve the accuracy for the steady-state deviation of power tracking. And then, the space vector modulation is used to achieve a constant switching frequency, and no voltage sensor can achieved effectively by estimating the grid voltage to save system costs and improve system robustness. A detailed theoretical derivation and simulation analysis are given in this paper, the simulation results verify the feasibility and effectiveness of the proposed method.
三相PWM整流器预测直接功率控制
[J].
DOI:10.13976/j.cnki.xk.2021.0032
[本文引用: 1]
针对三相PWM (pulse width modulation)整流器预测直接功率控制(predictive direct power control,PDPC)策略中,数字处理过程存在的延迟问题,设计两步预测方法消除延迟,并设计反馈校正环节对传统PDPC策略中参考功率不准确的问题进行修正,消除实际功率与参考功率之间存在的偏差.另外,在三相PWM整流器中,网压传感器使整个系统变得更复杂且耗费成本,因此采用改进型二阶广义积分器(second-order generalized integrator,SOGI)产生同频率的正交信号估算电网电压,并将基于改进型SOGI的无网压传感器算法应用于优化后的PDPC策略中.在仿真平台对所提方法进行仿真,结果表明所提方法消除了功率跟踪偏差,准确估算了电网电压.通过对比传统与优化后的PDPC策略仿真结果,验证了所提方法的有效性.
Predictive direct power control of three-phase pulse width modulation rectifiers
[J].
DOI:10.13976/j.cnki.xk.2021.0032
[本文引用: 1]
To solve the delay problems in the digital processing of the three-phase pulse width modulation (PWM) rectifier predictive direct power control (PDPC) strategy, we design a two-step prediction method to eliminate the delay and a feedback correction link to correct the inaccurate reference power in the traditional PDPC strategy, so as to eliminate the deviation between the actual power and reference power. In the three-phase PWM rectifier, a grid voltage sensor makes the whole system complex and costly. Therefore, we use an improved second-order generalized integrator (SOGI) to generate orthogonal signals of the same frequency and to estimate the grid voltage. Then, we apply a grid voltage sensor-free algorithm based on the improved SOGI to the optimized PDPC strategy. The proposed method is simulated on the simulation platform. Simulation results show that the proposed method can eliminate power tracking deviation and accurately estimate the grid voltage. The effectiveness of the proposed method is verified by comparing the simulation results of the traditional and optimized PDPC strategies.
Predictive direct power control for three-phase Vienna rectifier with simplied SVM
[C]//
Linear active disturbance rejection control for three-phase voltage-source PWM rectifier
[J].DOI:10.1109/Access.6287639 URL [本文引用: 1]
Passivity-based control with active disturbance rejection control of Vienna rectifier under unbalanced grid conditions
[J].DOI:10.1109/Access.6287639 URL [本文引用: 1]
脉冲负载下PWM整流器自适应线性自抗扰控制
[J].
Adaptive linear active disturbance rejection control method of PWM rectifier under pulse load
[J].
三相PWM整流器高阶积分端末滑模控制策略
[J].
High-order integral terminal sliding mode control strategy of three-phase PWM rectifier
[J].
一种基于滑模观测器的动车组整流器控制策略研究
[J].
A control strategy for EMUs rectifier based on sliding mode observer
[J].
单相五电平整流器滑模模型预测控制
[J].
Single-phase five-level rectifier
[J].
Three-phase voltage-type PWM rectifier controller design based on feedback linearization
[C]//

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}