1 引言
随着现代电力工业的飞速发展和互联电网运行规模的不断扩大,电力系统的运行已不能仅依靠局部反馈信号来保持[1 ] 。近年来,基于相量测量单元的广域测量系统的发展与应用为互联电网的协调控制和分布式同步测量带来了新的机遇[2 ] 。广域反馈控制信号虽然能提高系统的动态性能,但其远距离的信号接收与发送存在较明显的时滞现象。大量试验研究表明,时滞现象的存在会降低电力系统的控制性能,使区域电网动态失稳,甚至出现大面积停电现象,所以确保互联电网的安全稳定运行至关重要。众所周知,频率是衡量电能质量的一个重要指标[3 ] 。电力系统稳定运行的要求是确保电网频率始终维持在某个固定值或在某个固定值上下小范围内浮动,而负荷频率控制(Load frequency control,LFC)就是实现这一要求的最常用方法。因此,研究时滞LFC系统对确保电网的安全稳定运行具有十分重要的价值与意义[4 ] 。
目前,用于时滞电力系统稳定性分析的方法很多,但由于电力系统本身具有时变性与参数不确定性,因此,基于Lyapunov稳定理论分析法成为最主要的分析方法[5 -6 ] 。该方法主要通过构造一个合适的Lyapunov-Krasovskii泛函,并对泛函进行求导运算,有效处理泛函导数中存在的积分项,从而导出系统渐近稳定的充分条件[7 ] 。它的优点是泛函的解析过程一般可以有效转化为凸优化问题进行求解,缺点是得出的结论具有较大的保守性,有待进一步改善[8 ] 。因此,如何有效降低结论的保守性成为学者们一直努力的方向。文献[9 ]对时滞电力系统的稳定域进行了分析,由于在Lyapunov-Krasovskii泛函中引入的自由变量较少,所以运算效率高,但未考虑时滞变化率对电力系统稳定域的影响。文献[10 ]在构造Lyapunov-Krasovskii泛函基础上应用了Wirtinger积分不等式方法对电力系统稳定域进行分析,在一定层面上改善了结论保守性。文献[11 ]在应用Wirtinger积分不等式的基础上引入松散项,推导了含不确定性参数的多时滞电力系统稳定性判据。文献[12 ]使用PI控制器研究了在定常时滞与时变时滞情况下含LFC控制方案的电力系统稳定性。尽管上述文献研究的时滞电力系统稳定性判据的保守性在一定程度上得到了降低,但是构造的泛函都仅考虑引入常实数矩阵,且对泛函导数进行界定时未采用扩展逆凸二次不等式方法,所以使得结论保守性依然明显。
基于上述分析,本文建立了系统矩阵中含PID参数的时滞LFC系统数学模型。通过构造一个时滞乘积型Lyapunov-Krasovskii泛函,并应用文献[13 ]中提出的扩展逆凸二次不等式方法来精确界定泛函导数中的积分项,推导出具有更小保守性的系统稳定新判据。采用典型二阶系统数值算例进行试验仿真,仿真结果表明新判据的有效性。同时,还将新判据应用于系统矩阵中含PID参数的电力系统LFC系统模型中,分析了系统在不同控制增益参数K P 、K I 的情况下,K P 、K I 参数与系统时滞稳定裕度之间的关系。
2 LFC系统模型建立
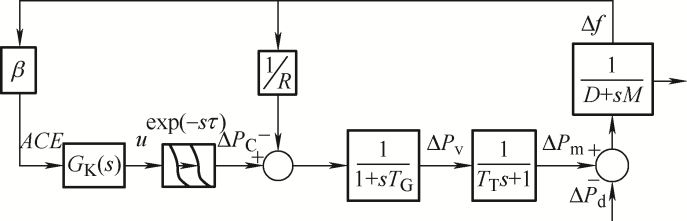
在系统的稳定性探讨中,为了分析复杂高阶系统,一般从简单低阶系统着手研究,本文从电力系统中简化的LFC模型结构入手,分析了系统的稳定性问题,其模型结构如图1 所示[14 ] 。
图1
从图1 可看出,LFC系统模型结构由五个子模型组成。各模型的简化传递函数式如下所示。
(1) 原动机模型。简化的传递函数式为[15 -16 ]
(2) 发电机-负荷模型。该模型存在如下关系[14 ]
(2) Δ P m ( s ) − Δ P d ( s ) = M s Δ f ( s ) + D Δ f ( s ) ![]()
式中,ΔP m 为发电机机械功率的变化量;ΔP d 为负荷端功率的变化量;Δf 为频率的变化量;D 为发电机的阻尼系数;M 为转动惯量。
(3) 辅助模型。目前电力系统中的电能频率控制一般采用PID控制器来实现,其模型的传递函数为[14 ]
(3) G K ( s ) = u ( s ) ACE ( s ) = K P + K I s + K D s ![]()
式中,K P 、K I 与K D 分别为PID控制器的比例、积分与微分增益;u 和ACE分别为控制输出量和控制误差量;ACE可定义为[17 ]
(6) Δ P v ( s ) = Δ P C ( s ) 1 + T G s − 1 1 + T G s ⋅ Δ f ( s ) R ![]()
式中,Δ ![]()
P C 是负荷参考值;R 是调速器的速度跌落系数;T G 为调速器的惯性时间常数。
(5) 时滞模型。时滞主要体现在测量信号的收集与发送中,常采用函数式e xp ( − s τ ) ![]()
τ 反映了时滞的大小。
综合上述所示,可得出简化的时滞LFC系统结构框图如图2 所示[17 ] 。
图2
定义x (t )和y (t )分别为系统的状态变量和输出变量,由图2 可知
(7) x ( t ) = Δ f Δ P m Δ P v T y ( t ) = ACE ( t ) ![]()
(8) x ˙ ( t ) = A x ( t ) + B u ( t − τ ( t ) ) + F w ( t ) y ( t ) = C x ( t ) ![]()
式中,w ( t ) = Δ P d ; u ( t − τ ( t ) ) = Δ P C ( t ) ; C = β T 0 0 ; ![]()
A = − D M 1 M 0 0 − 1 T T 1 T T − 1 T G R 0 − 1 T G ; B = 0 0 1 T G ; F = − 1 M 0 0 。
(9) u ( t ) = K P ACE ( t ) + K I ∫ ACE ( t ) d t + K D d ACE ( t ) d t ![]()
(10) y ¯ ( t ) = y T ( t ) ∫ y T ( t ) d t d d t y T ( t ) T x ¯ ( t ) = x T ( t ) ∫ y T ( t ) d t T ![]()
由于CB
(11) x ¯ ˙ ( t ) = A ¯ x ¯ ( t ) + B ¯ u ( t − τ ( t ) ) + F ¯ w ( t ) y ¯ ( t ) = C ¯ x ¯ ( t ) + D ¯ W w ( t ) u ( t ) = − K y ¯ ( t ) ![]()
A ¯ = A 0 C 0 B ¯ = B 0 F ¯ = F 0 C ¯ = C 0 0 1 C A 0
D ¯ W = 0 0 C F K = K P K I K D
(12) x ¯ ˙ ( t ) = A ¯ x ¯ ( t ) + A ¯ d x ¯ ( t − τ ( t ) ) + B ¯ w w ( t ) ![]()
式中,A ¯ d = − B ¯ K C ¯ ; B ¯ w = F ¯ − B ¯ K D ¯ w 。 ![]()
(13) 0= A ¯ x ¯ ∗ ( t ) + A ¯ d x ¯ ∗ ( t − τ ( t ) ) + B ¯ w w ( t ) ![]()
令x s ( t ) = x ¯ ( t ) − x ¯ ∗ ( t ) ; A s = A ¯ ; A ds = A ¯ d ![]()
(14) x ˙ s ( t ) = A s x s ( t ) + A ds x s ( t − τ ( t ) ) ![]()
(15) A s = − D M 1 M 0 0 0 − 1 T T 1 T T 0 − 1 T G R 0 − 1 T G 0 β 0 0 0 ![]()
(16) A ds = 0 0 0 0 0 0 0 0 β K P T G − β D K D M T G β K D M T G 0 K I T G 0 0 0 0 ![]()
(17) x ˙ ( t ) = A s x ( t ) + A ds x ( t − τ ( t ) ) t > 0 x ( t ) = ϕ ( t ) t ∈ − τ , 0 ![]()
式中,A s 与A ds 为系统矩阵;τ (t )是时变时滞函数且满足0≤τ (t )≤τ ,τ ˙ ( t ) ≤ u ![]()
ϕ t )是系统的初始状态。
3 稳定新判据
3.1 主要引理
为推导出本文新判据,需要用到以下三个引理。其中,R n × m n ×m 阶矩阵空间,R n n 维向量空间;N 为非负整数(即自然数);S n × n n ×n 的实对称矩阵,上标“T”为矩阵的转置;0 代表合适维度的零矩阵;P 0 表示矩阵P X X +X T 。
引理1[18 ] :给定一个n ×n 实对称正定矩阵R α 、β (α<β )和向量值函数ω
(18) ∫ α β ω ˙ T ( s ) R ω ˙ ( s ) d s ≥ 1 β − α Ω T ( α , β ) R ¯ Ω ( α , β ) ![]()
R ¯ = d i a g R , 3 R , 5 R Ω ( α , β ) = ϑ 0 T ϑ 1 T ϑ 2 T T ϑ 0 = ω ( β ) − ω ( α ) ϑ 1 = ω ( β ) + ω ( α ) − 2 β − α ∫ α β ω ( s ) d s ϑ 2 = ω ( β ) − ω ( α ) + 6 β − α ∫ α β ω ( s ) d s − 12 ( β − α ) 2 ∫ α β ∫ θ β ω ( s ) d s d θ
引理2[13 ] :对于一个n ×n 实对称正定矩阵R α $\epsilon$(0,1),如果存在实对称矩阵X 1 、X 2 、X 3 、X 4 $\epsilon$S n × n Y 1 、Y 2 、Y 3 、Y 4 $\epsilon$R n × n
(19) α 2 X 3 Y 3 + Y 4 ∗ X 4 + α X 1 Y 1 − Y 2 − 2 Y 4 ∗ − X 2 − 2 X 4 + − R Y 2 + Y 4 ∗ − R + X 2 + X 4 ≤ 0 ![]()
(20) 1 α R 0 0 1 1 − α R ≥ R + T 1 T 2 ∗ R + T 3 ![]()
T 1 =(1-α )X 1 +α (1-α )X 3
T 2 =αY 1 +(1-α )Y 2 +α 2 Y 3 +(1-α )2 Y 4
T 3 =αX 2 +α (1-α )X 4
引理3[7 , 13 ] :给定函数f ( s ) = a 2 s 2 + a 1 s + a 0 ![]()
s ![]()
τ ]且α 2 ![]()
α 1 ![]()
α 0 ∈ R n ![]()
f (s )<0成立。
(3) τ 2 N + 1 f ˙ i − 1 2 N τ + f i − 1 2 N τ < 0 ![]()
3.2 主要结论
本节应用扩展的逆凸二次不等式技术,推导出系统矩阵含PID参数的时滞LFC系统稳定新判据。为了简化表示,首先定义如下向量和矩阵。
η 1 ( t ) = η 1 a T ( t ) η 1 b T ( t ) η 1 c T ( t ) T η 1 a ( t ) = x Τ ( t ) x Τ ( t − τ ( t ) ) x Τ ( t − τ ) T η 1 b ( t ) = 1 τ ( t ) ∫ t − τ ( t ) t x T ( s ) d s T
η 1 c ( t ) = 1 τ 2 ( t ) ∫ t − τ ( t ) t ∫ t − τ ( t ) θ x T ( s ) d s d θ T
η 2 ( t )= η 1a T ( t ) η 2b T ( t ) η 2c T ( t ) T
η 2 b ( t ) = 1 h − τ ( t ) ∫ t − τ t − τ ( t ) x T ( s ) d s T η 2 c ( t ) = 1 [ h − τ ( t ) ] 2 ∫ t − τ t − τ ( t ) ∫ t − τ θ x T ( s ) d s d θ T
η 3 ( t , s )= η 3a T ( t , s ) η 3b T ( t , s ) T η 3a ( t , s )= x ˙ T ( s ) x T ( s ) ∫ s t x T ( θ ) d θ T η 3b ( t , s )= ∫ t − τ ( t ) s x T ( θ ) d θ T
η 4 ( t , s )= η 4a T ( t , s ) η 4b T ( t , s ) T η 4a ( t , s )= x ˙ T ( s ) x T ( s ) ∫ s t − τ ( t ) x T ( θ ) d θ T η 4b ( t , s )= ∫ t − τ s x T ( θ ) d θ T
ξ ( t ) = η 1 a T ( t ) ξ 1 T ( t ) ξ 2 T ( t ) ξ 3 T ( t ) ξ 4 T ( t ) Τ
ξ 1 ( t ) = x ˙ Τ ( t − τ ( t ) ) x ˙ Τ ( t − τ ) 1 τ ( t ) ∫ t − τ ( t ) t x Τ ( s ) d s Τ ξ 2 ( t ) = 1 τ − τ ( t ) ∫ t − τ t − τ ( t ) x Τ ( s ) d s Τ ξ 3 ( t ) = 1 τ 2 ( t ) ∫ t − τ ( t ) t ∫ θ t x Τ ( s ) d s d θ Τ ξ 4 ( t ) = 1 ( τ − τ ( t ) ) 2 ∫ t − τ t − τ ( t ) ∫ θ t − τ ( t ) x Τ ( s ) d s d θ Τ
e i = 0 n × ( i − 1 ) n I n 0 n × ( 9 − i ) n i = 1 , 2 , ⋯ , 9
基于构造的时滞乘积型泛函和逆凸二次不等式方法,得到以下稳定性准则。
定理1:给定两个标量u 和τ> 0,若存在对称矩阵Q 1 ($\epsilon$S 4 n ×4 n > 0,Q 2 ($\epsilon$S 4 n ×4 n > 0,P 11 $\epsilon$S 5 n ×5 n P 12 $\epsilon$S 5 n ×5 n P 21 $\epsilon$S 5 n ×5 n P 22 $\epsilon$S 5 n ×5 n Z S n × n > 0,对称矩阵X 1 、X 2 、X 3 、X 4 $\epsilon$S 3 n ×3 n Y 1 、Y 2 、Y 3 、Y 4 $\epsilon$R 3 n ×3 n τ ( t ) ∈ [ 0 , τ ] ![]()
τ ˙ ( t ) ≤ u ![]()
Φ 0 = − Z ¯ Y 2 + Y 4 ∗ − Z ¯ + X 2 + X 4 Φ 1 = X 1 Y 1 − Y 2 − 2 Y 4 ∗ − X 2 − 2 X 4 Φ 2 = X 3 Y 3 + Y 4 ∗ X 4
ϒ 0 =Sym{ Π 11 T P 11 λ 2 + Π 21 T ( τ P 21 + τ 2 P 22 ) λ 1 + Π 51 T Q 1 λ 4 + Π 21 T ( P 21 + τ P 22 ) λ 3 + Π 81 T Q 2 λ 5 − M 1 T ( Y 1 + Y 3 ) M 2 } + τ ˙ ( t ) Π 11 T P 11 Π 11 − τ ˙ ( t ) Π 21 T ( P 21 + 2 τ P 22 ) Π 21 − ( 1 − τ ˙ ( t ) ) Π 41 T Q 1 Π 41 + ( 1 − τ ˙ ( t ) ) Π 61 T Q 2 Π 61 − Π 71 T Q 2 Π 71 + Π 31 T Q 1 Π 31 + τ 2 e 0 T Z e 0 − M 1 T Z ¯ M 1 − M 2 T ( Z ¯ + X 2 ) M 2
ϒ 1 =Sym{ Π 11 T P 11 λ 1 + Π 11 T P 12 λ 2 − Π 21 T ( P 21 + 2 τ P 22 ) λ 1 − Π 21 T P 22 λ 3 + Π 31 T Q 1 Π 32 − ( 1 − τ ˙ ( t ) ) Π 41 T Q 1 Π 42 + Π 52 T Q 1 λ 4 − Π 82 T Q 2 λ 5 + ( 1 − τ ˙ ( t ) ) Π 61 T Q 2 Π 62 − Π 71 T Q 2 Π 72 + M 1 T ( 1 τ Y 1 − 1 τ Y 2 + 2 τ Y 3 ) M 2 } + 2 τ ˙ ( t ) Π 11 T P 12 Π 11 + 2 τ ˙ ( t ) Π 21 T P 22 Π 21 − M 1 T ( 1 τ X 1 + 1 τ X 3 ) M 1 − M 2 T ( 1 τ X 4 − 1 τ X 2 ) M 2
ϒ 2 =Sym{ Π 11 T P 12 λ 1 + Π 21 T P 22 λ 1 + Π 53 T Q 1 λ 4 + Π 83 T Q 2 λ 5 − M 1 T ( 1 τ 2 Y 3 + 1 τ 2 Y 4 ) M 2 } − ( 1 − τ ˙ ( t ) ) Π 42 T Q 1 Π 42 + Π 32 T Q 1 Π 32 − Π 72 T Q 2 Π 72 + ( 1 − τ ˙ ( t ) ) Π 62 T Q 2 Π 62 + M 1 T ( 1 τ 2 X 3 ) M 1 + M 2 T ( 1 τ 2 X 4 ) M 2
Π 11 = e 1 T e 2 T e 3 T e 6 T e 6 T − e 8 T T Π 21 = e 1 T e 2 T e 3 T e 7 T e 7 T − e 9 T T Π 31 = e 0 T e 1 T 0 0 T Π 32 = 0 0 0 e 6 T T Π 41 = e 4 T e 2 T 0 0 T Π 42 = 0 0 e 6 T 0 T
Π 51 = e 1 T − e 2 T 0 0 0 T Π 52 = 0 e 6 T 0 0 T Π 53 = 0 0 e 8 T e 6 T − e 8 T T Π 61 = e 4 T e 2 T 0 τ e 7 T T Π 62 = 0 0 0 − e 7 T T
Π 71 = e 5 T e 3 T τ e 7 T 0 T Π 72 = 0 0 − e 7 T 0 T
Π 81 = e 2 T − e 3 T τ e 7 T τ 2 e 9 T τ 2 ( e 7 T − e 9 T ) T Π 82 = 0 e 7 T 2 τ e 9 T 2 τ ( e 7 T − e 9 T ) T
Π 83 = 0 0 e 9 T e 7 T − e 9 T T
$\begin{array}{l} \lambda_{1}=\left[\begin{array}{lllll} \boldsymbol{e}_{0}^{\mathrm{T}} & (1-\dot{\tau}(t)) \boldsymbol{e}_{4}^{\mathrm{T}} & \boldsymbol{e}_{5}^{\mathrm{T}} & \mathbf{0} & \mathbf{0} \end{array}\right]^{\mathrm{T}} \\ \lambda_{2}=\left[\begin{array}{l} \tau_{1} \\ \tau_{2} \end{array}\right] \quad \lambda_{3}=\left[\begin{array}{l} \tau_{3} \\ \tau_{4} \end{array}\right] \\ \tau_{1}=\left[\begin{array}{llll} \mathbf{0} & \mathbf{0} & \mathbf{0} & \boldsymbol{e}_{1}^{\mathrm{T}}-(1-\dot{\tau}(t)) \boldsymbol{e}_{2}^{\mathrm{T}}-\dot{\tau}(t) \boldsymbol{e}_{6}^{\mathrm{T}} \end{array}\right]^{\mathrm{T}} \\ \end{array}$
$\begin{array}{l} \tau_{2}=\left[\boldsymbol{e}_{6}^{\mathrm{T}}-(1-t(t)) \boldsymbol{e}_{2}^{\mathrm{T}}-2(t)\left(\boldsymbol{e}_{6}^{\mathrm{T}}-\boldsymbol{e}_{8}^{\mathrm{T}}\right)\right]^{\mathrm{T}} \\ \tau_{3}=\left[\begin{array}{llll} \mathbf{0} & \mathbf{0} & \mathbf{0} & (1-\boldsymbol{d}(\boldsymbol{t})) \boldsymbol{e}_{2}^{\mathrm{T}}-\boldsymbol{e}_{3}^{\mathrm{T}}+\boldsymbol{z}(\boldsymbol{t}) \boldsymbol{e}_{7}^{\mathrm{T}} \end{array}\right]^{\mathrm{T}} \\ \tau_{4}=\left[(1-\boldsymbol{t}(t)) \boldsymbol{e}_{7}^{\mathrm{T}}-\boldsymbol{e}_{3}^{\mathrm{T}}+2 \tau(t)\left(\boldsymbol{e}_{7}^{\mathrm{T}}-\boldsymbol{e}_{9}^{\mathrm{T}}\right)\right]^{\mathrm{T}} \\ \lambda_{4}=\left[\begin{array}{llll} \mathbf{0} & \mathbf{0} & \boldsymbol{e}_{1}^{\mathrm{T}} & -(1-\boldsymbol{d}(t)) \boldsymbol{e}_{2}^{\mathrm{T}} \end{array}\right]^{\mathrm{T}} \\ \lambda_{5}=\left[\begin{array}{llll} \mathbf{0} & \mathbf{0} & (1-\boldsymbol{c}(t)) \boldsymbol{e}_{2}^{\mathrm{T}} & -\boldsymbol{e}_{3}^{\mathrm{T}} \end{array}\right]^{\mathrm{T}} \\ \boldsymbol{M}_{1}=\left[\boldsymbol{e}_{2}^{\mathrm{T}}-\boldsymbol{e}_{3}^{\mathrm{T}} \boldsymbol{e}_{2}^{\mathrm{T}}+\boldsymbol{e}_{3}^{\mathrm{T}}-2 \boldsymbol{e}_{7}^{\mathrm{T}} \boldsymbol{e}_{2}^{\mathrm{T}}-\boldsymbol{e}_{3}^{\mathrm{T}}+6 \boldsymbol{e}_{7}^{\mathrm{T}}-12 \boldsymbol{e}_{9}^{\mathrm{T}}\right]^{\mathrm{T}} \\ \boldsymbol{M}_{2}=\left[\boldsymbol{e}_{1}^{\mathrm{T}}-\boldsymbol{e}_{2}^{\mathrm{T}} \boldsymbol{e}_{1}^{\mathrm{T}}+\boldsymbol{e}_{2}^{\mathrm{T}}-2 \boldsymbol{e}_{6}^{\mathrm{T}} \boldsymbol{e}_{1}^{\mathrm{T}}-\boldsymbol{e}_{2}^{\mathrm{T}}+6 \boldsymbol{e}_{6}^{\mathrm{T}}-12 \boldsymbol{e}_{8}^{\mathrm{T}}\right]^{\mathrm{T}} \\ \end{array}$
e 0 = A s e 1 + A ds e 2
Z ¯ = d i a g { Z , 3 Z , 5 Z }
α = τ − τ ( t ) τ ∈ 0 , 1
证明:首先,选取如下Lyapunov-Krasovskii泛函
(25) V ( t ) = V 1 ( t )+ V 2 ( t )+ V 3 ( t ) V 1 ( t )= τ ( t ) η 1 T ( t ) P 1 ( t ) η 1 ( t ) + ( τ − τ ( t ) ) η 2 T ( t ) P 2 ( t ) η 2 ( t ) V 2 ( t )= ∫ t − τ ( t ) t η 3 T ( t , s ) Q 1 η 3 ( t , s ) d s + ∫ t − τ t − τ ( t ) η 4 T ( t , s ) Q 2 η 4 ( t , s ) d s V 3 ( t )= τ ∫ − τ 0 ∫ t + θ t x ˙ T ( s ) Z x ˙ ( s ) d s d θ ![]()
式中,P 1 ( t ) = P 11 + τ ( t ) P 12 , P 2 ( t ) = P 21 +( τ − τ ( t ) ) P 22 ![]()
注释1:V 1 (t )中的耦合矩阵包含时变矩阵P 1 (t )和P 2 (t )两部分,此时不需要P 11 、P 12 、P 21 和P 22 均大于0,只需要P 11 + τ ( t ) P 12 > 0 ![]()
P 21 +[ τ − τ ( t ) ] P 22 > 0 ![]()
P 12 和P 22 的自由度,从而降低了稳定性条件的保守性。当P 1 (t P 2 (t Q 1 >0、Q 2 >0和Z V t )>0,即该泛函正定。
V ˙ ( t ) = V ˙ 1 ( t )+ V ˙ 2 ( t )+ V ˙ 3 ( t )
(26) V ˙ 1 ( t ) =2 τ ( t ) η 1 T ( t ) P 1 ( t ) η ˙ 1 ( t ) + τ ( t ) η 1 T ( t ) P ˙ 1 ( t ) η 1 ( t ) + τ ˙ ( t ) η 1 T ( t ) P 1 ( t ) η 1 ( t ) + 2 ( τ − τ ( t ) ) η 2 T ( t ) P 2 ( t ) η ˙ 2 ( t ) + ( τ − τ ( t ) ) η 2 T ( t ) P ˙ 2 ( t ) η 2 ( t ) − τ ˙ ( t ) η 2 T ( t ) P 2 ( t ) η 2 ( t ) ![]()
(27) V ˙ 2 ( t ) = η 3 T ( t , t ) Q 1 η 3 ( t , t ) − η 4 T ( t , t − τ ) Q 2 η 4 ( t , t − τ ) − ( 1 − τ ˙ ( t ) ) η 3 T ( t , t − τ ( t ) ) Q 1 η 3 ( t , t − τ ( t ) ) + ( 1 − τ ˙ ( t ) ) η 4 T ( t , t − τ ( t ) ) Q 2 η 4 ( t , t − τ ( t ) ) + 2 ∫ t − τ ( t ) t η 3 T ( t , s ) Q 1 ∂ η 3 ( t , s ) ∂ t d s + 2 ∫ t − τ t − τ ( t ) η 4 T ( t , s ) Q 2 ∂ η 4 ( t , s ) ∂ t d s ![]()
(28) V ˙ 3 ( t ) = τ 2 x ˙ T ( t ) Z x ˙ ( t ) − τ ∫ t − τ t x ˙ T ( s ) Z x ˙ ( s ) d s ![]()
(29) τ ∫ t − τ t x ˙ T ( s ) Z x ˙ ( s ) d s ≥ ξ T ( t ) [ 1 α M 1 T Z ¯ M 1 + 1 1 − α M 2 T Z ¯ M 2 ] ξ ( t ) ![]()
(30) ξ T ( t ) [ 1 α M 1 T Z ¯ M 1 + 1 1 − α M 2 T Z ¯ M 2 ] ξ ( t ) ≥ ξ T ( t ) [ Μ 1 T Τ ¯ 1 Μ 1 + 2 Μ 1 T Τ ¯ 2 Μ 2 + Μ 2 T Τ ¯ 3 Μ 2 ] ξ ( t ) ![]()
Τ ¯ 1 = Z ¯ + ( 1 − α ) X 1 + α ( 1 − α ) X 3 Τ ¯ 2 = α Y 1 + ( 1 − α ) Y 2 + α 2 Y 3 + ( 1 − α ) 2 Y 4 Τ ¯ 3 = Z ¯ + α X 2 + α ( 1 − α ) X 4
V ˙ ( t ) ≤ ξ T ( t ) [ τ 2 ( t ) ϒ 2 + τ ( t ) ϒ 1 + ϒ 0 ] ξ ( t )
因此,时滞在满足约束条件τ ( t ) ∈ [ 0 , τ ] ![]()
τ ˙ ( t ) ≤ u ![]()
V ˙ ( t ) < 0 ![]()
注释2:由于式(23)和式(24)分别是关于α ![]()
τ ( t ) ![]()
定理2:给定两个标量u 和τ> 0,若存在对称矩阵Q 1 (Q 1 $\epsilon$S 4 n ×4 n > 0,Q 2 (Q 2 $\epsilon$S 4 n ×4 n > 0,P 11 $\epsilon$S 5 n ×5 n P 12 $\epsilon$S 5 n ×5 n P 21 $\epsilon$S 5 n ×5 n P 22 $\epsilon$S 5 n ×5 n Z Z S n × n > 0,对称矩阵X 1 ,X 2 ,X 3 ,X 4 $\epsilon$S 3 n ×3 n Y 1 ,Y 2 ,Y 3 ,Y 4 $\epsilon$R 3 n ×3 n τ ( t ) ∈ [ 0 , τ ] ![]()
τ ˙ ( t ) ≤ u ![]()
(33) 1 2 N χ ¯ j + χ ¯ j 2 Φ 2 + 1 2 N + 1 + χ ¯ j Φ 1 + Φ 0 ≤ 0 ![]()
(36) τ 2 N χ ˜ j + χ ˜ j 2 ϒ 2 + τ 2 N + 1 + χ ˜ j ϒ 1 + ϒ 0 ≤ 0 ![]()
式中,χ ¯ j = j − 1 2 N , χ ˜ j = j − 1 2 N τ , j = 1 , 2 , ⋯ , 2 N 。 ![]()
4 数值算例分析
针对文献[19 ]中提出的PID控制器的时域性和鲁棒性与两个参数有关的结论,本节深入分析了PID参数对电力系统中LFC系统稳定性的影响。
4.1 典型二阶系统
本文通过两个常用二阶系统算例来验证新判据的有效性,通过试验仿真证明了新判据在改善系统保守性方面与其他方法相比具有显著优越性。
A s = − 2 0 0 − 0.9 A ds = − 1 0 − 1 − 1
借助Matlab中的LMI工具箱对本文获得的稳定新判据进行试验仿真,试验运算结果及基于相关文献中的稳定性判据获得的结果如表1 所示。其中“—”表示在相应的文献中没有提供这种情况的最大时滞允许上界。
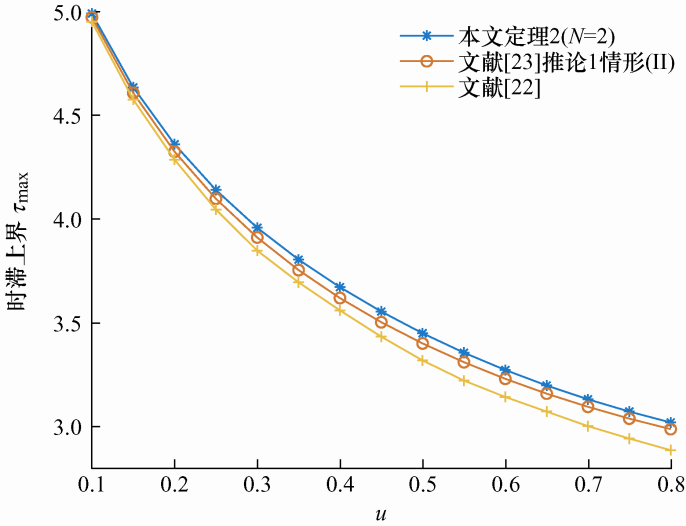
由表1 可以看出,应用本文推导出的新判据,能让系统的保守性得到很大改善。当u =0.1,N =1时,基于本文定理2获得的最大时滞允许上界是4.961,由文献[23 ]中的推论1情形(I)得到的运算结果是4.946,改善率达到0.303%;而给定u =0.1时,文献[22 ]得出的运算结果与文献[21 ]相比提高了0.006,改善率仅为0.121%。上述对比结果说明,将本文新判据应用于二阶系统矩阵方程算例一中,确实降低了系统的保守性。另外,由图3 还可以进一步看出,由本文定理2(N =2)得出的系统最大允许时滞上界τ max 明显大于文献[23 ]推论1情形(II)与文献[22 ]中的结果,这充分说明了本文构造的时滞乘积型Lyapunov-Krasovskii泛函以及在界定泛函导数时所应用的扩展逆凸二次不等式方法在降低系统保守性方面与文献[22 -23 ]中的增广型Lyapunov-Krasovskii以及在界定泛函导数时所应用的其他方法相比具有明显优势。本文构造的时滞乘积型Lyapunov-Krasovskii泛函考虑了更多系统状态信息,并增大了矩阵P 12 和P 22 的自由度,而本文应用的扩展逆凸二次不等式方法在界定泛函导数中出现的积分项时,能使计算值更接近于理论值,从而有效降低了系统的保守性。
图3
图3
通过改变u 获得不同判据下系统的最大允许时滞上界τ max
A s = 0 1 − 1 − 2 A ds = 0 0 − 1 1
用同样的试验运算方法,可以得出试验运算结果如表2 所示。
将本文新判据应用于二阶系统矩阵算例二中进行仿真后发现,本文新判据在算例二中也能减小系统的保守性。
通过对以上二阶系统矩阵方程的算例仿真验证后,可以得出共同结论:本文提出的稳定性准则具有更小的保守性,并且与其他文献中提出的方法相比具有显著的优越性。
4.2 含PID参数的LFC系统
本文将新判据应用于系统矩阵中含PID参数的时滞电力系统稳定性分析当中,目的在于探讨含PID参数的时滞电力系统稳定性问题,进一步验证本文新判据的有效性。
A s = − D M 1 M 0 0 0 − 1 T T 1 T T 0 − 1 T G R 0 − 1 T G 0 β 0 0 0
A ds = 0 0 0 0 0 0 0 0 β K P T G − β D K D M T G β K D M T G 0 K I T G 0 0 0 0
根据已建立的LFC系统矩阵方程A s 、A ds 以及相关参数[14 ] (其中,D =1.0、T G =0.10、R =0.05、M =10和T T =0.3),利用Matlab中的Yalmip优化工具集成器和SDPT 3.0来求解系统矩阵中含PID参数的时滞电力系统处于定常时滞(u =0)和时变时滞(u =0.5)情况下,PI控制增益与系统时滞稳定上界之间的关系。运算结果如表3 、4 所示。
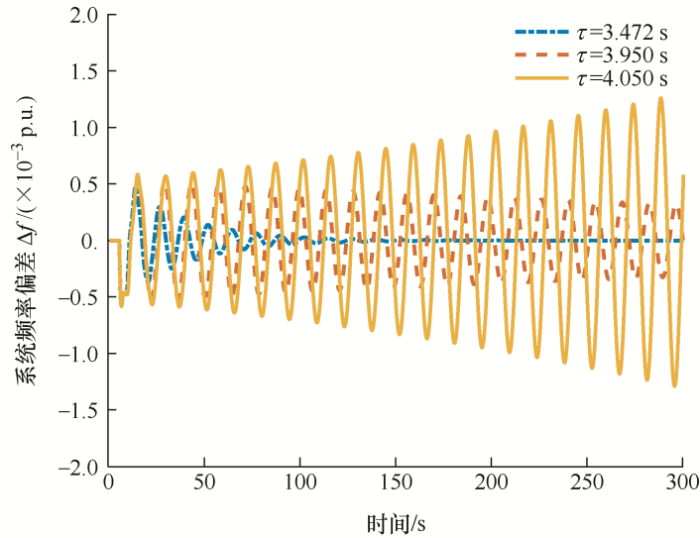
从表3 中可以看出,处于定常时滞(u =0)的情况下,当LFC系统中的控制增益参数K P 、K I 分别给定不同值时,应用本文新判据得出的仿真结果明显优于文献[14 ,17 ]中的结果,并且其计算值非常接近于系统最大允许时滞上界理论值,如图4 所示。
图4
图4
不同时滞下的系统频率偏差(K P =K I =0.4,u =0)
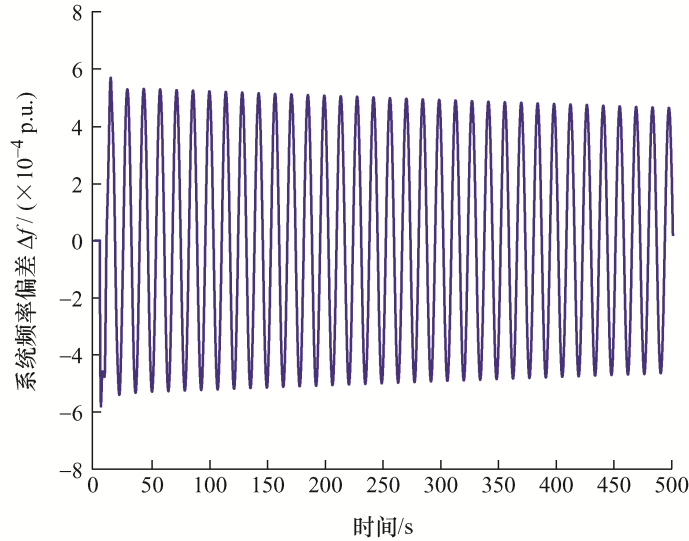
从图4 中可以看出,当τ= 3.472 s时,经过LFC系统的二次调频使系统频率偏差快速收敛到0,这说明通过文献[14 ]中的稳定判据得到的系统仿真结果非常保守,而当τ= 3.950 s时,系统频率偏差仍然呈收敛趋势,但是保守性得到了极大改善,当τ= 4.050 s时,系统频率偏差呈发散状态,这意味着当K P =K I =0.4,u =0时,该系统的时滞稳定上界取值范围在3.950~4.050 s。然而,应用本文新判据获得的时滞稳定上界为3.980 s,这说明应用本文新判据获得的最大允许时滞上界非常接近于理论值,同时,也充分证明了本文新判据的正确性。事实上,当τ= 3.980 s时,K P =K I =0.4,u =0时系统频率偏差如图5 所示。
图5
图5
τ= 3.980 s时的系统频率偏差(K P =K I =0.4,u =0)
另外,由表3 、4 还可以观察出,增益参数K P 、K I 的选取会对系统的最大允许时滞上界产生一定影响。当增益参数K I 一定时,系统时滞稳定上界随K P 的增大呈先增大后减小的趋势;而当增益参数K P 一定时,系统的最大允许时滞上界随着K I 的增大而减小。
综上所述,将本文定理2应用在典型二阶系统与含PID参数的LFC系统中,都能使系统的保守性得到极大改善,上述试验仿真结果充分验证了这一结论的正确性。
5 结论
为了分析系统矩阵中PID参数对时滞LFC系统稳定性的影响,本文以建立的时滞电力系统数学模型为基础,考虑了构建时滞乘积型Lyapunov-Krasovskii泛函、扩展的逆凸二次不等式方法,推导出一个时滞电力系统稳定新判据,通过试验仿真得到如下结论。
(1) 通过将新判据应用于两个典型二阶矩阵方程算例与一个LFC系统矩阵方程算例中,试验仿真结果验证了新判据的正确性以及在改善系统保守性方面与其他工作相比具有显著优势。
(2) 当系统处于定常时滞或时变时滞情况下,改变增益参数K P 、K I 的取值,系统的时滞稳定裕度与PI控制增益会呈现一定关系。
参考文献
View Option
[1]
钱伟 , 吴嘉欣 , 费树岷 . 基于时滞依赖矩阵泛函的变时滞电力系统稳定性分析
[J]. 电力系统自动化 , 2020 , 44 (1 ):53 -58 .
[本文引用: 1]
QIAN Wei WU Jiaxin FEI Shumin Analysis on power systems stability with time-dependent matrix functional
[J]. Automation of Electric Power Systems , 2020 , 44 (1 ):53 -58 .
[本文引用: 1]
[2]
刘运花 , 黎雄 , 刘志雄 , 等 . 基于灰色预测的广域电力系统稳定器分布延时补偿设计
[J]. 电力系统自动化 , 2015 , 39 (12 ):44 -49 .
[本文引用: 1]
LIU Yunhua LI Xiong LIU Zhixiong et al. A compensation design for wide-area power system stabilizer distributed time delay based on grey prediction
[J]. Automation of Electric Power Systems , 2015 , 39 (12 ):44 -49 .
[本文引用: 1]
[3]
徐冰亮 , 曹世光 , 于继来 , 等 . 基于需求侧管理的频率质量控制探讨
[J]. 电力系统自动化 , 2003 , 27 (11 ):72 -76 .
[本文引用: 1]
XU Bingliang CAO Shiguang YU Jilai et al. DSM based frequency quality control of power systems
[J]. Automation of Electric Power Systems , 2003 , 27 (11 ):72 -76 .
[本文引用: 1]
[4]
刘云平 , 王皖东 , 梅平 , 等 . 多区域时滞电力系统稳定判据的优化
[J]. 控制理论与应用 , 2018 , 35 (7 ):994 -1001 .
[本文引用: 1]
LIU Yunping WANG Wandong MEI Ping et al. Optimization of stability criterion for multi-area power system with time delay
[J]. Control Theory & Applications , 2018 , 35 (7 ):994 -1001 .
[本文引用: 1]
[5]
潘丽姣 . 基于自由权矩阵的时变时延NCSs稳定性和鲁棒性分析
[J]. 计算机应用与软件 , 2014 , 31 (3 ):126 -130 .
[本文引用: 1]
PAN Lijiao Stability and robust analysis for NCSs with time-varying delays based on free-weighting matrix
[J]. Computer Applications and Software , 2014 , 31 (3 ):126 -130 .
[本文引用: 1]
[6]
古丽扎提·海拉提 , 王杰 . 多时滞广域测量电力系统稳定分析与协调控制器设计
[J]. 电工技术学报 , 2014 , 29 (2 ):279 -289 .
[本文引用: 1]
GULIZHATI·Hailati , WANG Jie Multiple time delays analysis and coordinated stability control for power system wide area measurement
[J]. Transactions of China Electrotechnical Society , 2014 , 29 (2 ):279 -289 .
[本文引用: 1]
[7]
LU Rongxin WEI Hui BAI Jianguo New delay-dependent robust stability criteria for uncertain neutral systems with mixed delays
[J]. Journal of the Franklin Institute , 2014 , 351 (3 ):1386 -1399 .
DOI:10.1016/j.jfranklin.2013.11.001
URL
[本文引用: 2]
[8]
赵亚文 , 丛屾 . 广域电力系统动态稳定性分析的时滞系统方法
[J]. 黑龙江大学工程学报 , 2021 , 12 (1 ):68 -74 .
[本文引用: 1]
ZHAO Yawen CONG Shen Time-delay systems approach to stability analysis of wide area power systems
[J]. Journal of Engineering of Heilongjiang University , 2021 , 12 (1 ):68 -74 .
[本文引用: 1]
[9]
孙国强 , 屠越 , 孙永辉 , 等 . 时变时滞电力系统鲁棒稳定性的改进型判据
[J]. 电力系统自动化 , 2015 , 39 (3 ):59 -62 .
[本文引用: 1]
SUN Guoqiang TU Yue SUN Yonghui et al. An improved robust stability criterion for power systems with time-varying delay
[J]. Automation of Electric Power Systems , 2015 , 39 (3 ):59 -62 .
[本文引用: 1]
[10]
钱伟 , 蒋鹏冲 . 时滞电力系统带记忆反馈控制方法
[J]. 电网技术 , 2017 , 41 (11 ):3605 -3611 .
[本文引用: 1]
QIAN Wei JIANG Pengchong A method of memory feedback control for power system with time-delay
[J]. Power System Technology , 2017 , 41 (11 ):3605 -3611 .
[本文引用: 1]
[11]
孙永辉 , 李宁 , 卫志农 , 等 . 多时滞不确定电力系统的改进时滞依赖鲁棒稳定判据
[J]. 电力系统自动化 , 2017 , 41 (16 ):117 -122 .
[本文引用: 1]
SUN Yonghui LI Ning WEI Zhinong et al. Improved robust delay-dependent stability criteria for power systems with multiple time delays and uncertain parameters
[J]. Automation of Electric Power Systems , 2017 , 41 (16 ):117 -122 .
[本文引用: 1]
[12]
JIANG Ling YAO Wei WU Qinghua et al. Delay-dependent stability for load frequency control with constant and time-varying delays
[J]. IEEE Transactions on Power Systems , 2012 , 27 (2 ):932 -941 .
DOI:10.1109/TPWRS.2011.2172821
URL
[本文引用: 1]
[13]
ZENG Hongbing LIN Huichao HE Yong et al. Hierarchical stability conditions for time-varying delay systems via an extended reciprocally convex quadratic inequality
[J]. Journal of the Franklin Institute , 2020 , 357 (14 ):9930 -9941 .
DOI:10.1016/j.jfranklin.2020.07.034
URL
[本文引用: 3]
[14]
张传科 . 时滞电力系统的小扰动稳定分析与负荷频率控制 [D]. 长沙 : 中南大学 , 2013 .
[本文引用: 12]
ZHANG Chuanke Small-signal stability analysis and load frequency control for delayed power systems [D]. Changsha : Central South University , 2013 .
[本文引用: 12]
[15]
钱伟 , 蒋鹏冲 , 车凯 . 基于Wirtinger不等式的时变时滞电力系统稳定性分析
[J]. 电力系统保护与控制 , 2016 , 44 (23 ):79 -85 .
[本文引用: 2]
QIAN Wei JIANG Pengchong CHE Kai Stability analysis for power system with time-delay based on Wirtinger inequality
[J]. Power System Protection and Control , 2016 , 44 (23 ):79 -85 .
[本文引用: 2]
[16]
贾宏杰 , 安海云 , 余晓丹 . 电力系统改进时滞依赖型稳定判据
[J]. 电力系统自动化 , 2008 , 32 (19 ):15 -19 .
[本文引用: 1]
JIA Hongjie AN Haiyun YU Xiaodan An improved delay-dependent stability criteria for power system with multiple time delays
[J]. Automation of Electric Power Systems , 2008 , 32 (19 ):15 -19 .
[本文引用: 1]
[17]
曾红兵 , 刘晓桂 , 肖会芹 , 等 . 基于PID负荷频率控制的电力系统时滞相关鲁棒稳定性分析
[J]. 电测与仪表 , 2019 , 56 (23 ):120 -126 .
[本文引用: 9]
ZENG Hongbing LIU Xiaogui XIAO Huiqin et al. Delay-dependent robust stability of power system with PID load frequency control
[J]. Electrical Measurement & Instrumentation , 2019 , 56 (23 ):120 -126 .
[本文引用: 9]
[19]
TAN Wen Unified tuning of PID load frequency controller for power systems via IMC
[J]. IEEE Transactions on Power System , 2010 , 25 (1 ):341 -350 .
DOI:10.1109/TPWRS.2009.2036463
URL
[本文引用: 1]
[20]
曾树华 , 刘晓桂 , 魏丽君 . 基于改进型Bessel-Legendre不等式的电力系统时滞相关鲁棒稳定性研究
[J]. 数学的实践与认识 , 2021 , 51 (6 ):177 -187 .
[本文引用: 1]
ZENG Shuhua LIU Xiaogui WEI Lijun Delay-dependent robust stability of power systems based on improved Bessel-Legendre inequality
[J]. Mathematics in Practice and Theory , 2021 , 51 (6 ):177 -187 .
[本文引用: 1]
[21]
CHEN Jun PARK J H XU Shengyuan Stability analysis of systems with time-varying delay:A quadratic-partitioning method
[J]. IET Control Theory and Applications , 2019 , 13 (18 ):3184 -3189 .
DOI:10.1049/cth2.v13.18
URL
[本文引用: 3]
[22]
LONG Fei JIANG Lin HE Yong et al. Stability analysis of systems with time-varying delay via novel augmented Lyapunov-Krasovskii functionals and an improved integral inequality
[J]. Applied Mathematics and Computation , 2019 , 357 :325 -337 .
DOI:10.1016/j.amc.2019.04.004
URL
[本文引用: 4]
[23]
ZENG Hongbing LIN Huichao HE Yong et al. Improved negativity condition for a quadratic function and its application to systems with time-varying delay
[J]. IET Control Theory and Applications , 2020 , 14 (18 ):2989 -2993 .
DOI:10.1049/cth2.v14.18
URL
[本文引用: 7]
基于时滞依赖矩阵泛函的变时滞电力系统稳定性分析
1
2020
... 随着现代电力工业的飞速发展和互联电网运行规模的不断扩大,电力系统的运行已不能仅依靠局部反馈信号来保持[1 ] .近年来,基于相量测量单元的广域测量系统的发展与应用为互联电网的协调控制和分布式同步测量带来了新的机遇[2 ] .广域反馈控制信号虽然能提高系统的动态性能,但其远距离的信号接收与发送存在较明显的时滞现象.大量试验研究表明,时滞现象的存在会降低电力系统的控制性能,使区域电网动态失稳,甚至出现大面积停电现象,所以确保互联电网的安全稳定运行至关重要.众所周知,频率是衡量电能质量的一个重要指标[3 ] .电力系统稳定运行的要求是确保电网频率始终维持在某个固定值或在某个固定值上下小范围内浮动,而负荷频率控制(Load frequency control,LFC)就是实现这一要求的最常用方法.因此,研究时滞LFC系统对确保电网的安全稳定运行具有十分重要的价值与意义[4 ] . ...
Analysis on power systems stability with time-dependent matrix functional
1
2020
... 随着现代电力工业的飞速发展和互联电网运行规模的不断扩大,电力系统的运行已不能仅依靠局部反馈信号来保持[1 ] .近年来,基于相量测量单元的广域测量系统的发展与应用为互联电网的协调控制和分布式同步测量带来了新的机遇[2 ] .广域反馈控制信号虽然能提高系统的动态性能,但其远距离的信号接收与发送存在较明显的时滞现象.大量试验研究表明,时滞现象的存在会降低电力系统的控制性能,使区域电网动态失稳,甚至出现大面积停电现象,所以确保互联电网的安全稳定运行至关重要.众所周知,频率是衡量电能质量的一个重要指标[3 ] .电力系统稳定运行的要求是确保电网频率始终维持在某个固定值或在某个固定值上下小范围内浮动,而负荷频率控制(Load frequency control,LFC)就是实现这一要求的最常用方法.因此,研究时滞LFC系统对确保电网的安全稳定运行具有十分重要的价值与意义[4 ] . ...
基于灰色预测的广域电力系统稳定器分布延时补偿设计
1
2015
... 随着现代电力工业的飞速发展和互联电网运行规模的不断扩大,电力系统的运行已不能仅依靠局部反馈信号来保持[1 ] .近年来,基于相量测量单元的广域测量系统的发展与应用为互联电网的协调控制和分布式同步测量带来了新的机遇[2 ] .广域反馈控制信号虽然能提高系统的动态性能,但其远距离的信号接收与发送存在较明显的时滞现象.大量试验研究表明,时滞现象的存在会降低电力系统的控制性能,使区域电网动态失稳,甚至出现大面积停电现象,所以确保互联电网的安全稳定运行至关重要.众所周知,频率是衡量电能质量的一个重要指标[3 ] .电力系统稳定运行的要求是确保电网频率始终维持在某个固定值或在某个固定值上下小范围内浮动,而负荷频率控制(Load frequency control,LFC)就是实现这一要求的最常用方法.因此,研究时滞LFC系统对确保电网的安全稳定运行具有十分重要的价值与意义[4 ] . ...
A compensation design for wide-area power system stabilizer distributed time delay based on grey prediction
1
2015
... 随着现代电力工业的飞速发展和互联电网运行规模的不断扩大,电力系统的运行已不能仅依靠局部反馈信号来保持[1 ] .近年来,基于相量测量单元的广域测量系统的发展与应用为互联电网的协调控制和分布式同步测量带来了新的机遇[2 ] .广域反馈控制信号虽然能提高系统的动态性能,但其远距离的信号接收与发送存在较明显的时滞现象.大量试验研究表明,时滞现象的存在会降低电力系统的控制性能,使区域电网动态失稳,甚至出现大面积停电现象,所以确保互联电网的安全稳定运行至关重要.众所周知,频率是衡量电能质量的一个重要指标[3 ] .电力系统稳定运行的要求是确保电网频率始终维持在某个固定值或在某个固定值上下小范围内浮动,而负荷频率控制(Load frequency control,LFC)就是实现这一要求的最常用方法.因此,研究时滞LFC系统对确保电网的安全稳定运行具有十分重要的价值与意义[4 ] . ...
基于需求侧管理的频率质量控制探讨
1
2003
... 随着现代电力工业的飞速发展和互联电网运行规模的不断扩大,电力系统的运行已不能仅依靠局部反馈信号来保持[1 ] .近年来,基于相量测量单元的广域测量系统的发展与应用为互联电网的协调控制和分布式同步测量带来了新的机遇[2 ] .广域反馈控制信号虽然能提高系统的动态性能,但其远距离的信号接收与发送存在较明显的时滞现象.大量试验研究表明,时滞现象的存在会降低电力系统的控制性能,使区域电网动态失稳,甚至出现大面积停电现象,所以确保互联电网的安全稳定运行至关重要.众所周知,频率是衡量电能质量的一个重要指标[3 ] .电力系统稳定运行的要求是确保电网频率始终维持在某个固定值或在某个固定值上下小范围内浮动,而负荷频率控制(Load frequency control,LFC)就是实现这一要求的最常用方法.因此,研究时滞LFC系统对确保电网的安全稳定运行具有十分重要的价值与意义[4 ] . ...
DSM based frequency quality control of power systems
1
2003
... 随着现代电力工业的飞速发展和互联电网运行规模的不断扩大,电力系统的运行已不能仅依靠局部反馈信号来保持[1 ] .近年来,基于相量测量单元的广域测量系统的发展与应用为互联电网的协调控制和分布式同步测量带来了新的机遇[2 ] .广域反馈控制信号虽然能提高系统的动态性能,但其远距离的信号接收与发送存在较明显的时滞现象.大量试验研究表明,时滞现象的存在会降低电力系统的控制性能,使区域电网动态失稳,甚至出现大面积停电现象,所以确保互联电网的安全稳定运行至关重要.众所周知,频率是衡量电能质量的一个重要指标[3 ] .电力系统稳定运行的要求是确保电网频率始终维持在某个固定值或在某个固定值上下小范围内浮动,而负荷频率控制(Load frequency control,LFC)就是实现这一要求的最常用方法.因此,研究时滞LFC系统对确保电网的安全稳定运行具有十分重要的价值与意义[4 ] . ...
多区域时滞电力系统稳定判据的优化
1
2018
... 随着现代电力工业的飞速发展和互联电网运行规模的不断扩大,电力系统的运行已不能仅依靠局部反馈信号来保持[1 ] .近年来,基于相量测量单元的广域测量系统的发展与应用为互联电网的协调控制和分布式同步测量带来了新的机遇[2 ] .广域反馈控制信号虽然能提高系统的动态性能,但其远距离的信号接收与发送存在较明显的时滞现象.大量试验研究表明,时滞现象的存在会降低电力系统的控制性能,使区域电网动态失稳,甚至出现大面积停电现象,所以确保互联电网的安全稳定运行至关重要.众所周知,频率是衡量电能质量的一个重要指标[3 ] .电力系统稳定运行的要求是确保电网频率始终维持在某个固定值或在某个固定值上下小范围内浮动,而负荷频率控制(Load frequency control,LFC)就是实现这一要求的最常用方法.因此,研究时滞LFC系统对确保电网的安全稳定运行具有十分重要的价值与意义[4 ] . ...
Optimization of stability criterion for multi-area power system with time delay
1
2018
... 随着现代电力工业的飞速发展和互联电网运行规模的不断扩大,电力系统的运行已不能仅依靠局部反馈信号来保持[1 ] .近年来,基于相量测量单元的广域测量系统的发展与应用为互联电网的协调控制和分布式同步测量带来了新的机遇[2 ] .广域反馈控制信号虽然能提高系统的动态性能,但其远距离的信号接收与发送存在较明显的时滞现象.大量试验研究表明,时滞现象的存在会降低电力系统的控制性能,使区域电网动态失稳,甚至出现大面积停电现象,所以确保互联电网的安全稳定运行至关重要.众所周知,频率是衡量电能质量的一个重要指标[3 ] .电力系统稳定运行的要求是确保电网频率始终维持在某个固定值或在某个固定值上下小范围内浮动,而负荷频率控制(Load frequency control,LFC)就是实现这一要求的最常用方法.因此,研究时滞LFC系统对确保电网的安全稳定运行具有十分重要的价值与意义[4 ] . ...
基于自由权矩阵的时变时延NCSs稳定性和鲁棒性分析
1
2014
... 目前,用于时滞电力系统稳定性分析的方法很多,但由于电力系统本身具有时变性与参数不确定性,因此,基于Lyapunov稳定理论分析法成为最主要的分析方法[5 -6 ] .该方法主要通过构造一个合适的Lyapunov-Krasovskii泛函,并对泛函进行求导运算,有效处理泛函导数中存在的积分项,从而导出系统渐近稳定的充分条件[7 ] .它的优点是泛函的解析过程一般可以有效转化为凸优化问题进行求解,缺点是得出的结论具有较大的保守性,有待进一步改善[8 ] .因此,如何有效降低结论的保守性成为学者们一直努力的方向.文献[9 ]对时滞电力系统的稳定域进行了分析,由于在Lyapunov-Krasovskii泛函中引入的自由变量较少,所以运算效率高,但未考虑时滞变化率对电力系统稳定域的影响.文献[10 ]在构造Lyapunov-Krasovskii泛函基础上应用了Wirtinger积分不等式方法对电力系统稳定域进行分析,在一定层面上改善了结论保守性.文献[11 ]在应用Wirtinger积分不等式的基础上引入松散项,推导了含不确定性参数的多时滞电力系统稳定性判据.文献[12 ]使用PI控制器研究了在定常时滞与时变时滞情况下含LFC控制方案的电力系统稳定性.尽管上述文献研究的时滞电力系统稳定性判据的保守性在一定程度上得到了降低,但是构造的泛函都仅考虑引入常实数矩阵,且对泛函导数进行界定时未采用扩展逆凸二次不等式方法,所以使得结论保守性依然明显. ...
Stability and robust analysis for NCSs with time-varying delays based on free-weighting matrix
1
2014
... 目前,用于时滞电力系统稳定性分析的方法很多,但由于电力系统本身具有时变性与参数不确定性,因此,基于Lyapunov稳定理论分析法成为最主要的分析方法[5 -6 ] .该方法主要通过构造一个合适的Lyapunov-Krasovskii泛函,并对泛函进行求导运算,有效处理泛函导数中存在的积分项,从而导出系统渐近稳定的充分条件[7 ] .它的优点是泛函的解析过程一般可以有效转化为凸优化问题进行求解,缺点是得出的结论具有较大的保守性,有待进一步改善[8 ] .因此,如何有效降低结论的保守性成为学者们一直努力的方向.文献[9 ]对时滞电力系统的稳定域进行了分析,由于在Lyapunov-Krasovskii泛函中引入的自由变量较少,所以运算效率高,但未考虑时滞变化率对电力系统稳定域的影响.文献[10 ]在构造Lyapunov-Krasovskii泛函基础上应用了Wirtinger积分不等式方法对电力系统稳定域进行分析,在一定层面上改善了结论保守性.文献[11 ]在应用Wirtinger积分不等式的基础上引入松散项,推导了含不确定性参数的多时滞电力系统稳定性判据.文献[12 ]使用PI控制器研究了在定常时滞与时变时滞情况下含LFC控制方案的电力系统稳定性.尽管上述文献研究的时滞电力系统稳定性判据的保守性在一定程度上得到了降低,但是构造的泛函都仅考虑引入常实数矩阵,且对泛函导数进行界定时未采用扩展逆凸二次不等式方法,所以使得结论保守性依然明显. ...
多时滞广域测量电力系统稳定分析与协调控制器设计
1
2014
... 目前,用于时滞电力系统稳定性分析的方法很多,但由于电力系统本身具有时变性与参数不确定性,因此,基于Lyapunov稳定理论分析法成为最主要的分析方法[5 -6 ] .该方法主要通过构造一个合适的Lyapunov-Krasovskii泛函,并对泛函进行求导运算,有效处理泛函导数中存在的积分项,从而导出系统渐近稳定的充分条件[7 ] .它的优点是泛函的解析过程一般可以有效转化为凸优化问题进行求解,缺点是得出的结论具有较大的保守性,有待进一步改善[8 ] .因此,如何有效降低结论的保守性成为学者们一直努力的方向.文献[9 ]对时滞电力系统的稳定域进行了分析,由于在Lyapunov-Krasovskii泛函中引入的自由变量较少,所以运算效率高,但未考虑时滞变化率对电力系统稳定域的影响.文献[10 ]在构造Lyapunov-Krasovskii泛函基础上应用了Wirtinger积分不等式方法对电力系统稳定域进行分析,在一定层面上改善了结论保守性.文献[11 ]在应用Wirtinger积分不等式的基础上引入松散项,推导了含不确定性参数的多时滞电力系统稳定性判据.文献[12 ]使用PI控制器研究了在定常时滞与时变时滞情况下含LFC控制方案的电力系统稳定性.尽管上述文献研究的时滞电力系统稳定性判据的保守性在一定程度上得到了降低,但是构造的泛函都仅考虑引入常实数矩阵,且对泛函导数进行界定时未采用扩展逆凸二次不等式方法,所以使得结论保守性依然明显. ...
Multiple time delays analysis and coordinated stability control for power system wide area measurement
1
2014
... 目前,用于时滞电力系统稳定性分析的方法很多,但由于电力系统本身具有时变性与参数不确定性,因此,基于Lyapunov稳定理论分析法成为最主要的分析方法[5 -6 ] .该方法主要通过构造一个合适的Lyapunov-Krasovskii泛函,并对泛函进行求导运算,有效处理泛函导数中存在的积分项,从而导出系统渐近稳定的充分条件[7 ] .它的优点是泛函的解析过程一般可以有效转化为凸优化问题进行求解,缺点是得出的结论具有较大的保守性,有待进一步改善[8 ] .因此,如何有效降低结论的保守性成为学者们一直努力的方向.文献[9 ]对时滞电力系统的稳定域进行了分析,由于在Lyapunov-Krasovskii泛函中引入的自由变量较少,所以运算效率高,但未考虑时滞变化率对电力系统稳定域的影响.文献[10 ]在构造Lyapunov-Krasovskii泛函基础上应用了Wirtinger积分不等式方法对电力系统稳定域进行分析,在一定层面上改善了结论保守性.文献[11 ]在应用Wirtinger积分不等式的基础上引入松散项,推导了含不确定性参数的多时滞电力系统稳定性判据.文献[12 ]使用PI控制器研究了在定常时滞与时变时滞情况下含LFC控制方案的电力系统稳定性.尽管上述文献研究的时滞电力系统稳定性判据的保守性在一定程度上得到了降低,但是构造的泛函都仅考虑引入常实数矩阵,且对泛函导数进行界定时未采用扩展逆凸二次不等式方法,所以使得结论保守性依然明显. ...
New delay-dependent robust stability criteria for uncertain neutral systems with mixed delays
2
2014
... 目前,用于时滞电力系统稳定性分析的方法很多,但由于电力系统本身具有时变性与参数不确定性,因此,基于Lyapunov稳定理论分析法成为最主要的分析方法[5 -6 ] .该方法主要通过构造一个合适的Lyapunov-Krasovskii泛函,并对泛函进行求导运算,有效处理泛函导数中存在的积分项,从而导出系统渐近稳定的充分条件[7 ] .它的优点是泛函的解析过程一般可以有效转化为凸优化问题进行求解,缺点是得出的结论具有较大的保守性,有待进一步改善[8 ] .因此,如何有效降低结论的保守性成为学者们一直努力的方向.文献[9 ]对时滞电力系统的稳定域进行了分析,由于在Lyapunov-Krasovskii泛函中引入的自由变量较少,所以运算效率高,但未考虑时滞变化率对电力系统稳定域的影响.文献[10 ]在构造Lyapunov-Krasovskii泛函基础上应用了Wirtinger积分不等式方法对电力系统稳定域进行分析,在一定层面上改善了结论保守性.文献[11 ]在应用Wirtinger积分不等式的基础上引入松散项,推导了含不确定性参数的多时滞电力系统稳定性判据.文献[12 ]使用PI控制器研究了在定常时滞与时变时滞情况下含LFC控制方案的电力系统稳定性.尽管上述文献研究的时滞电力系统稳定性判据的保守性在一定程度上得到了降低,但是构造的泛函都仅考虑引入常实数矩阵,且对泛函导数进行界定时未采用扩展逆凸二次不等式方法,所以使得结论保守性依然明显. ...
... 引理3
[7 , 13 ] :给定函数
f ( s ) = a 2 s 2 + a 1 s + a 0 ![]()
,其中
s ![]()
$\epsilon$[0,
τ ]且
α 2 ![]()
,
α 1 ![]()
,
α 0 ∈ R n ![]()
. 如果有以下条件成立,则
f (
s )<0成立. ...
广域电力系统动态稳定性分析的时滞系统方法
1
2021
... 目前,用于时滞电力系统稳定性分析的方法很多,但由于电力系统本身具有时变性与参数不确定性,因此,基于Lyapunov稳定理论分析法成为最主要的分析方法[5 -6 ] .该方法主要通过构造一个合适的Lyapunov-Krasovskii泛函,并对泛函进行求导运算,有效处理泛函导数中存在的积分项,从而导出系统渐近稳定的充分条件[7 ] .它的优点是泛函的解析过程一般可以有效转化为凸优化问题进行求解,缺点是得出的结论具有较大的保守性,有待进一步改善[8 ] .因此,如何有效降低结论的保守性成为学者们一直努力的方向.文献[9 ]对时滞电力系统的稳定域进行了分析,由于在Lyapunov-Krasovskii泛函中引入的自由变量较少,所以运算效率高,但未考虑时滞变化率对电力系统稳定域的影响.文献[10 ]在构造Lyapunov-Krasovskii泛函基础上应用了Wirtinger积分不等式方法对电力系统稳定域进行分析,在一定层面上改善了结论保守性.文献[11 ]在应用Wirtinger积分不等式的基础上引入松散项,推导了含不确定性参数的多时滞电力系统稳定性判据.文献[12 ]使用PI控制器研究了在定常时滞与时变时滞情况下含LFC控制方案的电力系统稳定性.尽管上述文献研究的时滞电力系统稳定性判据的保守性在一定程度上得到了降低,但是构造的泛函都仅考虑引入常实数矩阵,且对泛函导数进行界定时未采用扩展逆凸二次不等式方法,所以使得结论保守性依然明显. ...
Time-delay systems approach to stability analysis of wide area power systems
1
2021
... 目前,用于时滞电力系统稳定性分析的方法很多,但由于电力系统本身具有时变性与参数不确定性,因此,基于Lyapunov稳定理论分析法成为最主要的分析方法[5 -6 ] .该方法主要通过构造一个合适的Lyapunov-Krasovskii泛函,并对泛函进行求导运算,有效处理泛函导数中存在的积分项,从而导出系统渐近稳定的充分条件[7 ] .它的优点是泛函的解析过程一般可以有效转化为凸优化问题进行求解,缺点是得出的结论具有较大的保守性,有待进一步改善[8 ] .因此,如何有效降低结论的保守性成为学者们一直努力的方向.文献[9 ]对时滞电力系统的稳定域进行了分析,由于在Lyapunov-Krasovskii泛函中引入的自由变量较少,所以运算效率高,但未考虑时滞变化率对电力系统稳定域的影响.文献[10 ]在构造Lyapunov-Krasovskii泛函基础上应用了Wirtinger积分不等式方法对电力系统稳定域进行分析,在一定层面上改善了结论保守性.文献[11 ]在应用Wirtinger积分不等式的基础上引入松散项,推导了含不确定性参数的多时滞电力系统稳定性判据.文献[12 ]使用PI控制器研究了在定常时滞与时变时滞情况下含LFC控制方案的电力系统稳定性.尽管上述文献研究的时滞电力系统稳定性判据的保守性在一定程度上得到了降低,但是构造的泛函都仅考虑引入常实数矩阵,且对泛函导数进行界定时未采用扩展逆凸二次不等式方法,所以使得结论保守性依然明显. ...
时变时滞电力系统鲁棒稳定性的改进型判据
1
2015
... 目前,用于时滞电力系统稳定性分析的方法很多,但由于电力系统本身具有时变性与参数不确定性,因此,基于Lyapunov稳定理论分析法成为最主要的分析方法[5 -6 ] .该方法主要通过构造一个合适的Lyapunov-Krasovskii泛函,并对泛函进行求导运算,有效处理泛函导数中存在的积分项,从而导出系统渐近稳定的充分条件[7 ] .它的优点是泛函的解析过程一般可以有效转化为凸优化问题进行求解,缺点是得出的结论具有较大的保守性,有待进一步改善[8 ] .因此,如何有效降低结论的保守性成为学者们一直努力的方向.文献[9 ]对时滞电力系统的稳定域进行了分析,由于在Lyapunov-Krasovskii泛函中引入的自由变量较少,所以运算效率高,但未考虑时滞变化率对电力系统稳定域的影响.文献[10 ]在构造Lyapunov-Krasovskii泛函基础上应用了Wirtinger积分不等式方法对电力系统稳定域进行分析,在一定层面上改善了结论保守性.文献[11 ]在应用Wirtinger积分不等式的基础上引入松散项,推导了含不确定性参数的多时滞电力系统稳定性判据.文献[12 ]使用PI控制器研究了在定常时滞与时变时滞情况下含LFC控制方案的电力系统稳定性.尽管上述文献研究的时滞电力系统稳定性判据的保守性在一定程度上得到了降低,但是构造的泛函都仅考虑引入常实数矩阵,且对泛函导数进行界定时未采用扩展逆凸二次不等式方法,所以使得结论保守性依然明显. ...
An improved robust stability criterion for power systems with time-varying delay
1
2015
... 目前,用于时滞电力系统稳定性分析的方法很多,但由于电力系统本身具有时变性与参数不确定性,因此,基于Lyapunov稳定理论分析法成为最主要的分析方法[5 -6 ] .该方法主要通过构造一个合适的Lyapunov-Krasovskii泛函,并对泛函进行求导运算,有效处理泛函导数中存在的积分项,从而导出系统渐近稳定的充分条件[7 ] .它的优点是泛函的解析过程一般可以有效转化为凸优化问题进行求解,缺点是得出的结论具有较大的保守性,有待进一步改善[8 ] .因此,如何有效降低结论的保守性成为学者们一直努力的方向.文献[9 ]对时滞电力系统的稳定域进行了分析,由于在Lyapunov-Krasovskii泛函中引入的自由变量较少,所以运算效率高,但未考虑时滞变化率对电力系统稳定域的影响.文献[10 ]在构造Lyapunov-Krasovskii泛函基础上应用了Wirtinger积分不等式方法对电力系统稳定域进行分析,在一定层面上改善了结论保守性.文献[11 ]在应用Wirtinger积分不等式的基础上引入松散项,推导了含不确定性参数的多时滞电力系统稳定性判据.文献[12 ]使用PI控制器研究了在定常时滞与时变时滞情况下含LFC控制方案的电力系统稳定性.尽管上述文献研究的时滞电力系统稳定性判据的保守性在一定程度上得到了降低,但是构造的泛函都仅考虑引入常实数矩阵,且对泛函导数进行界定时未采用扩展逆凸二次不等式方法,所以使得结论保守性依然明显. ...
时滞电力系统带记忆反馈控制方法
1
2017
... 目前,用于时滞电力系统稳定性分析的方法很多,但由于电力系统本身具有时变性与参数不确定性,因此,基于Lyapunov稳定理论分析法成为最主要的分析方法[5 -6 ] .该方法主要通过构造一个合适的Lyapunov-Krasovskii泛函,并对泛函进行求导运算,有效处理泛函导数中存在的积分项,从而导出系统渐近稳定的充分条件[7 ] .它的优点是泛函的解析过程一般可以有效转化为凸优化问题进行求解,缺点是得出的结论具有较大的保守性,有待进一步改善[8 ] .因此,如何有效降低结论的保守性成为学者们一直努力的方向.文献[9 ]对时滞电力系统的稳定域进行了分析,由于在Lyapunov-Krasovskii泛函中引入的自由变量较少,所以运算效率高,但未考虑时滞变化率对电力系统稳定域的影响.文献[10 ]在构造Lyapunov-Krasovskii泛函基础上应用了Wirtinger积分不等式方法对电力系统稳定域进行分析,在一定层面上改善了结论保守性.文献[11 ]在应用Wirtinger积分不等式的基础上引入松散项,推导了含不确定性参数的多时滞电力系统稳定性判据.文献[12 ]使用PI控制器研究了在定常时滞与时变时滞情况下含LFC控制方案的电力系统稳定性.尽管上述文献研究的时滞电力系统稳定性判据的保守性在一定程度上得到了降低,但是构造的泛函都仅考虑引入常实数矩阵,且对泛函导数进行界定时未采用扩展逆凸二次不等式方法,所以使得结论保守性依然明显. ...
A method of memory feedback control for power system with time-delay
1
2017
... 目前,用于时滞电力系统稳定性分析的方法很多,但由于电力系统本身具有时变性与参数不确定性,因此,基于Lyapunov稳定理论分析法成为最主要的分析方法[5 -6 ] .该方法主要通过构造一个合适的Lyapunov-Krasovskii泛函,并对泛函进行求导运算,有效处理泛函导数中存在的积分项,从而导出系统渐近稳定的充分条件[7 ] .它的优点是泛函的解析过程一般可以有效转化为凸优化问题进行求解,缺点是得出的结论具有较大的保守性,有待进一步改善[8 ] .因此,如何有效降低结论的保守性成为学者们一直努力的方向.文献[9 ]对时滞电力系统的稳定域进行了分析,由于在Lyapunov-Krasovskii泛函中引入的自由变量较少,所以运算效率高,但未考虑时滞变化率对电力系统稳定域的影响.文献[10 ]在构造Lyapunov-Krasovskii泛函基础上应用了Wirtinger积分不等式方法对电力系统稳定域进行分析,在一定层面上改善了结论保守性.文献[11 ]在应用Wirtinger积分不等式的基础上引入松散项,推导了含不确定性参数的多时滞电力系统稳定性判据.文献[12 ]使用PI控制器研究了在定常时滞与时变时滞情况下含LFC控制方案的电力系统稳定性.尽管上述文献研究的时滞电力系统稳定性判据的保守性在一定程度上得到了降低,但是构造的泛函都仅考虑引入常实数矩阵,且对泛函导数进行界定时未采用扩展逆凸二次不等式方法,所以使得结论保守性依然明显. ...
多时滞不确定电力系统的改进时滞依赖鲁棒稳定判据
1
2017
... 目前,用于时滞电力系统稳定性分析的方法很多,但由于电力系统本身具有时变性与参数不确定性,因此,基于Lyapunov稳定理论分析法成为最主要的分析方法[5 -6 ] .该方法主要通过构造一个合适的Lyapunov-Krasovskii泛函,并对泛函进行求导运算,有效处理泛函导数中存在的积分项,从而导出系统渐近稳定的充分条件[7 ] .它的优点是泛函的解析过程一般可以有效转化为凸优化问题进行求解,缺点是得出的结论具有较大的保守性,有待进一步改善[8 ] .因此,如何有效降低结论的保守性成为学者们一直努力的方向.文献[9 ]对时滞电力系统的稳定域进行了分析,由于在Lyapunov-Krasovskii泛函中引入的自由变量较少,所以运算效率高,但未考虑时滞变化率对电力系统稳定域的影响.文献[10 ]在构造Lyapunov-Krasovskii泛函基础上应用了Wirtinger积分不等式方法对电力系统稳定域进行分析,在一定层面上改善了结论保守性.文献[11 ]在应用Wirtinger积分不等式的基础上引入松散项,推导了含不确定性参数的多时滞电力系统稳定性判据.文献[12 ]使用PI控制器研究了在定常时滞与时变时滞情况下含LFC控制方案的电力系统稳定性.尽管上述文献研究的时滞电力系统稳定性判据的保守性在一定程度上得到了降低,但是构造的泛函都仅考虑引入常实数矩阵,且对泛函导数进行界定时未采用扩展逆凸二次不等式方法,所以使得结论保守性依然明显. ...
Improved robust delay-dependent stability criteria for power systems with multiple time delays and uncertain parameters
1
2017
... 目前,用于时滞电力系统稳定性分析的方法很多,但由于电力系统本身具有时变性与参数不确定性,因此,基于Lyapunov稳定理论分析法成为最主要的分析方法[5 -6 ] .该方法主要通过构造一个合适的Lyapunov-Krasovskii泛函,并对泛函进行求导运算,有效处理泛函导数中存在的积分项,从而导出系统渐近稳定的充分条件[7 ] .它的优点是泛函的解析过程一般可以有效转化为凸优化问题进行求解,缺点是得出的结论具有较大的保守性,有待进一步改善[8 ] .因此,如何有效降低结论的保守性成为学者们一直努力的方向.文献[9 ]对时滞电力系统的稳定域进行了分析,由于在Lyapunov-Krasovskii泛函中引入的自由变量较少,所以运算效率高,但未考虑时滞变化率对电力系统稳定域的影响.文献[10 ]在构造Lyapunov-Krasovskii泛函基础上应用了Wirtinger积分不等式方法对电力系统稳定域进行分析,在一定层面上改善了结论保守性.文献[11 ]在应用Wirtinger积分不等式的基础上引入松散项,推导了含不确定性参数的多时滞电力系统稳定性判据.文献[12 ]使用PI控制器研究了在定常时滞与时变时滞情况下含LFC控制方案的电力系统稳定性.尽管上述文献研究的时滞电力系统稳定性判据的保守性在一定程度上得到了降低,但是构造的泛函都仅考虑引入常实数矩阵,且对泛函导数进行界定时未采用扩展逆凸二次不等式方法,所以使得结论保守性依然明显. ...
Delay-dependent stability for load frequency control with constant and time-varying delays
1
2012
... 目前,用于时滞电力系统稳定性分析的方法很多,但由于电力系统本身具有时变性与参数不确定性,因此,基于Lyapunov稳定理论分析法成为最主要的分析方法[5 -6 ] .该方法主要通过构造一个合适的Lyapunov-Krasovskii泛函,并对泛函进行求导运算,有效处理泛函导数中存在的积分项,从而导出系统渐近稳定的充分条件[7 ] .它的优点是泛函的解析过程一般可以有效转化为凸优化问题进行求解,缺点是得出的结论具有较大的保守性,有待进一步改善[8 ] .因此,如何有效降低结论的保守性成为学者们一直努力的方向.文献[9 ]对时滞电力系统的稳定域进行了分析,由于在Lyapunov-Krasovskii泛函中引入的自由变量较少,所以运算效率高,但未考虑时滞变化率对电力系统稳定域的影响.文献[10 ]在构造Lyapunov-Krasovskii泛函基础上应用了Wirtinger积分不等式方法对电力系统稳定域进行分析,在一定层面上改善了结论保守性.文献[11 ]在应用Wirtinger积分不等式的基础上引入松散项,推导了含不确定性参数的多时滞电力系统稳定性判据.文献[12 ]使用PI控制器研究了在定常时滞与时变时滞情况下含LFC控制方案的电力系统稳定性.尽管上述文献研究的时滞电力系统稳定性判据的保守性在一定程度上得到了降低,但是构造的泛函都仅考虑引入常实数矩阵,且对泛函导数进行界定时未采用扩展逆凸二次不等式方法,所以使得结论保守性依然明显. ...
Hierarchical stability conditions for time-varying delay systems via an extended reciprocally convex quadratic inequality
3
2020
... 基于上述分析,本文建立了系统矩阵中含PID参数的时滞LFC系统数学模型.通过构造一个时滞乘积型Lyapunov-Krasovskii泛函,并应用文献[13 ]中提出的扩展逆凸二次不等式方法来精确界定泛函导数中的积分项,推导出具有更小保守性的系统稳定新判据.采用典型二阶系统数值算例进行试验仿真,仿真结果表明新判据的有效性.同时,还将新判据应用于系统矩阵中含PID参数的电力系统LFC系统模型中,分析了系统在不同控制增益参数K P 、K I 的情况下,K P 、K I 参数与系统时滞稳定裕度之间的关系. ...
... 引理2[13 ] :对于一个n ×n 实对称正定矩阵R α $\epsilon$(0,1),如果存在实对称矩阵X 1 、X 2 、X 3 、X 4 $\epsilon$S n × n Y 1 、Y 2 、Y 3 、Y 4 $\epsilon$R n × n
... 引理3
[7 , 13 ] :给定函数
f ( s ) = a 2 s 2 + a 1 s + a 0 ![]()
,其中
s ![]()
$\epsilon$[0,
τ ]且
α 2 ![]()
,
α 1 ![]()
,
α 0 ∈ R n ![]()
. 如果有以下条件成立,则
f (
s )<0成立. ...
12
2013
... 在系统的稳定性探讨中,为了分析复杂高阶系统,一般从简单低阶系统着手研究,本文从电力系统中简化的LFC模型结构入手,分析了系统的稳定性问题,其模型结构如图1 所示[14 ] . ...
... (2) 发电机-负荷模型.该模型存在如下关系[14 ] ...
... (3) 辅助模型.目前电力系统中的电能频率控制一般采用PID控制器来实现,其模型的传递函数为[14 ] ...
... 根据已建立的LFC系统矩阵方程A s 、A ds 以及相关参数[14 ] (其中,D =1.0、T G =0.10、R =0.05、M =10和T T =0.3),利用Matlab中的Yalmip优化工具集成器和SDPT 3.0来求解系统矩阵中含PID参数的时滞电力系统处于定常时滞(u =0)和时变时滞(u =0.5)情况下,PI控制增益与系统时滞稳定上界之间的关系.运算结果如表3 、4 所示. ...
... K
P 、K
I 分别取不同值时的系统时滞上界τ
max (u=0)
K P K I 0.05 0.40 1.00 定理2 (N =1) 文献[17 ] 文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 0 30.914 30.853 27.927 3.381 3.377 3.124 0.923 0.922 0.886 0.05 31.874 31.263 27.881 3.501 3.496 3.215 0.970 0.969 0.927 0.20 34.224 27.763 25.114 3.792 3.784 3.320 1.078 1.077 1.016 0.40 35.830 22.194 20.364 3.980 3.472 2.832 1.118 1.116 1.017 0.60 16.126 15.727 14.618 3.825 2.734 2.130 0.947 0.933 0.827 1.00 0.595 0.594 0.546 0.515 0.515 0.482 0.361 0.360 0.348
10.11985/2023.04.029.T0004 表4 KP 、KI 分别取不同值时的系统的时滞上界τmax (u=0.5) ...
... 文献[
14 ]
定理2 (N =1) 文献[17 ] 文献[14 ] 0 30.914 30.853 27.927 3.381 3.377 3.124 0.923 0.922 0.886 0.05 31.874 31.263 27.881 3.501 3.496 3.215 0.970 0.969 0.927 0.20 34.224 27.763 25.114 3.792 3.784 3.320 1.078 1.077 1.016 0.40 35.830 22.194 20.364 3.980 3.472 2.832 1.118 1.116 1.017 0.60 16.126 15.727 14.618 3.825 2.734 2.130 0.947 0.933 0.827 1.00 0.595 0.594 0.546 0.515 0.515 0.482 0.361 0.360 0.348 10.11985/2023.04.029.T0004 表4 KP 、KI 分别取不同值时的系统的时滞上界τmax (u=0.5) ...
... 文献[
14 ]
0 30.914 30.853 27.927 3.381 3.377 3.124 0.923 0.922 0.886 0.05 31.874 31.263 27.881 3.501 3.496 3.215 0.970 0.969 0.927 0.20 34.224 27.763 25.114 3.792 3.784 3.320 1.078 1.077 1.016 0.40 35.830 22.194 20.364 3.980 3.472 2.832 1.118 1.116 1.017 0.60 16.126 15.727 14.618 3.825 2.734 2.130 0.947 0.933 0.827 1.00 0.595 0.594 0.546 0.515 0.515 0.482 0.361 0.360 0.348 10.11985/2023.04.029.T0004 表4 KP 、KI 分别取不同值时的系统的时滞上界τmax (u=0.5) ...
... K
P 、K
I 分别取不同值时的系统的时滞上界τ
max (u=0.5)
K P K I 0.05 0.40 1.00 定理2(N =1) 文献[17 ] 文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 0 29.689 27.324 26.374 3.236 2.962 2.854 0.852 0.743 0.674 0.05 30.647 27.240 26.054 3.353 3.068 2.960 0.899 0.785 0.715 0.20 32.844 22.524 21.384 3.625 3.212 2.956 0.997 0.853 0.783 0.40 33.700 14.868 14.108 3.726 2.578 2.176 0.990 0.768 0.696 0.60 3.249 5.574 4.693 3.203 1.090 1.029 0.726 0.554 0.502 1.00 0.508 0.435 0.408 0.448 0.390 0.365 0.329 0.300 0.280
从表3 中可以看出,处于定常时滞(u =0)的情况下,当LFC系统中的控制增益参数K P 、K I 分别给定不同值时,应用本文新判据得出的仿真结果明显优于文献[14 ,17 ]中的结果,并且其计算值非常接近于系统最大允许时滞上界理论值,如图4 所示. ...
... 文献[
14 ]
定理2 (N =1) 文献[17 ] 文献[14 ] 0 29.689 27.324 26.374 3.236 2.962 2.854 0.852 0.743 0.674 0.05 30.647 27.240 26.054 3.353 3.068 2.960 0.899 0.785 0.715 0.20 32.844 22.524 21.384 3.625 3.212 2.956 0.997 0.853 0.783 0.40 33.700 14.868 14.108 3.726 2.578 2.176 0.990 0.768 0.696 0.60 3.249 5.574 4.693 3.203 1.090 1.029 0.726 0.554 0.502 1.00 0.508 0.435 0.408 0.448 0.390 0.365 0.329 0.300 0.280 从表3 中可以看出,处于定常时滞(u =0)的情况下,当LFC系统中的控制增益参数K P 、K I 分别给定不同值时,应用本文新判据得出的仿真结果明显优于文献[14 ,17 ]中的结果,并且其计算值非常接近于系统最大允许时滞上界理论值,如图4 所示. ...
... 文献[
14 ]
0 29.689 27.324 26.374 3.236 2.962 2.854 0.852 0.743 0.674 0.05 30.647 27.240 26.054 3.353 3.068 2.960 0.899 0.785 0.715 0.20 32.844 22.524 21.384 3.625 3.212 2.956 0.997 0.853 0.783 0.40 33.700 14.868 14.108 3.726 2.578 2.176 0.990 0.768 0.696 0.60 3.249 5.574 4.693 3.203 1.090 1.029 0.726 0.554 0.502 1.00 0.508 0.435 0.408 0.448 0.390 0.365 0.329 0.300 0.280 从表3 中可以看出,处于定常时滞(u =0)的情况下,当LFC系统中的控制增益参数K P 、K I 分别给定不同值时,应用本文新判据得出的仿真结果明显优于文献[14 ,17 ]中的结果,并且其计算值非常接近于系统最大允许时滞上界理论值,如图4 所示. ...
... 从表3 中可以看出,处于定常时滞(u =0)的情况下,当LFC系统中的控制增益参数K P 、K I 分别给定不同值时,应用本文新判据得出的仿真结果明显优于文献[14 ,17 ]中的结果,并且其计算值非常接近于系统最大允许时滞上界理论值,如图4 所示. ...
... 从图4 中可以看出,当τ= 3.472 s时,经过LFC系统的二次调频使系统频率偏差快速收敛到0,这说明通过文献[14 ]中的稳定判据得到的系统仿真结果非常保守,而当τ= 3.950 s时,系统频率偏差仍然呈收敛趋势,但是保守性得到了极大改善,当τ= 4.050 s时,系统频率偏差呈发散状态,这意味着当K P =K I =0.4,u =0时,该系统的时滞稳定上界取值范围在3.950~4.050 s.然而,应用本文新判据获得的时滞稳定上界为3.980 s,这说明应用本文新判据获得的最大允许时滞上界非常接近于理论值,同时,也充分证明了本文新判据的正确性.事实上,当τ= 3.980 s时,K P =K I =0.4,u =0时系统频率偏差如图5 所示. ...
12
2013
... 在系统的稳定性探讨中,为了分析复杂高阶系统,一般从简单低阶系统着手研究,本文从电力系统中简化的LFC模型结构入手,分析了系统的稳定性问题,其模型结构如图1 所示[14 ] . ...
... (2) 发电机-负荷模型.该模型存在如下关系[14 ] ...
... (3) 辅助模型.目前电力系统中的电能频率控制一般采用PID控制器来实现,其模型的传递函数为[14 ] ...
... 根据已建立的LFC系统矩阵方程A s 、A ds 以及相关参数[14 ] (其中,D =1.0、T G =0.10、R =0.05、M =10和T T =0.3),利用Matlab中的Yalmip优化工具集成器和SDPT 3.0来求解系统矩阵中含PID参数的时滞电力系统处于定常时滞(u =0)和时变时滞(u =0.5)情况下,PI控制增益与系统时滞稳定上界之间的关系.运算结果如表3 、4 所示. ...
... K
P 、K
I 分别取不同值时的系统时滞上界τ
max (u=0)
K P K I 0.05 0.40 1.00 定理2 (N =1) 文献[17 ] 文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 0 30.914 30.853 27.927 3.381 3.377 3.124 0.923 0.922 0.886 0.05 31.874 31.263 27.881 3.501 3.496 3.215 0.970 0.969 0.927 0.20 34.224 27.763 25.114 3.792 3.784 3.320 1.078 1.077 1.016 0.40 35.830 22.194 20.364 3.980 3.472 2.832 1.118 1.116 1.017 0.60 16.126 15.727 14.618 3.825 2.734 2.130 0.947 0.933 0.827 1.00 0.595 0.594 0.546 0.515 0.515 0.482 0.361 0.360 0.348
10.11985/2023.04.029.T0004 表4 KP 、KI 分别取不同值时的系统的时滞上界τmax (u=0.5) ...
... 文献[
14 ]
定理2 (N =1) 文献[17 ] 文献[14 ] 0 30.914 30.853 27.927 3.381 3.377 3.124 0.923 0.922 0.886 0.05 31.874 31.263 27.881 3.501 3.496 3.215 0.970 0.969 0.927 0.20 34.224 27.763 25.114 3.792 3.784 3.320 1.078 1.077 1.016 0.40 35.830 22.194 20.364 3.980 3.472 2.832 1.118 1.116 1.017 0.60 16.126 15.727 14.618 3.825 2.734 2.130 0.947 0.933 0.827 1.00 0.595 0.594 0.546 0.515 0.515 0.482 0.361 0.360 0.348 10.11985/2023.04.029.T0004 表4 KP 、KI 分别取不同值时的系统的时滞上界τmax (u=0.5) ...
... 文献[
14 ]
0 30.914 30.853 27.927 3.381 3.377 3.124 0.923 0.922 0.886 0.05 31.874 31.263 27.881 3.501 3.496 3.215 0.970 0.969 0.927 0.20 34.224 27.763 25.114 3.792 3.784 3.320 1.078 1.077 1.016 0.40 35.830 22.194 20.364 3.980 3.472 2.832 1.118 1.116 1.017 0.60 16.126 15.727 14.618 3.825 2.734 2.130 0.947 0.933 0.827 1.00 0.595 0.594 0.546 0.515 0.515 0.482 0.361 0.360 0.348 10.11985/2023.04.029.T0004 表4 KP 、KI 分别取不同值时的系统的时滞上界τmax (u=0.5) ...
... K
P 、K
I 分别取不同值时的系统的时滞上界τ
max (u=0.5)
K P K I 0.05 0.40 1.00 定理2(N =1) 文献[17 ] 文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 0 29.689 27.324 26.374 3.236 2.962 2.854 0.852 0.743 0.674 0.05 30.647 27.240 26.054 3.353 3.068 2.960 0.899 0.785 0.715 0.20 32.844 22.524 21.384 3.625 3.212 2.956 0.997 0.853 0.783 0.40 33.700 14.868 14.108 3.726 2.578 2.176 0.990 0.768 0.696 0.60 3.249 5.574 4.693 3.203 1.090 1.029 0.726 0.554 0.502 1.00 0.508 0.435 0.408 0.448 0.390 0.365 0.329 0.300 0.280
从表3 中可以看出,处于定常时滞(u =0)的情况下,当LFC系统中的控制增益参数K P 、K I 分别给定不同值时,应用本文新判据得出的仿真结果明显优于文献[14 ,17 ]中的结果,并且其计算值非常接近于系统最大允许时滞上界理论值,如图4 所示. ...
... 文献[
14 ]
定理2 (N =1) 文献[17 ] 文献[14 ] 0 29.689 27.324 26.374 3.236 2.962 2.854 0.852 0.743 0.674 0.05 30.647 27.240 26.054 3.353 3.068 2.960 0.899 0.785 0.715 0.20 32.844 22.524 21.384 3.625 3.212 2.956 0.997 0.853 0.783 0.40 33.700 14.868 14.108 3.726 2.578 2.176 0.990 0.768 0.696 0.60 3.249 5.574 4.693 3.203 1.090 1.029 0.726 0.554 0.502 1.00 0.508 0.435 0.408 0.448 0.390 0.365 0.329 0.300 0.280 从表3 中可以看出,处于定常时滞(u =0)的情况下,当LFC系统中的控制增益参数K P 、K I 分别给定不同值时,应用本文新判据得出的仿真结果明显优于文献[14 ,17 ]中的结果,并且其计算值非常接近于系统最大允许时滞上界理论值,如图4 所示. ...
... 文献[
14 ]
0 29.689 27.324 26.374 3.236 2.962 2.854 0.852 0.743 0.674 0.05 30.647 27.240 26.054 3.353 3.068 2.960 0.899 0.785 0.715 0.20 32.844 22.524 21.384 3.625 3.212 2.956 0.997 0.853 0.783 0.40 33.700 14.868 14.108 3.726 2.578 2.176 0.990 0.768 0.696 0.60 3.249 5.574 4.693 3.203 1.090 1.029 0.726 0.554 0.502 1.00 0.508 0.435 0.408 0.448 0.390 0.365 0.329 0.300 0.280 从表3 中可以看出,处于定常时滞(u =0)的情况下,当LFC系统中的控制增益参数K P 、K I 分别给定不同值时,应用本文新判据得出的仿真结果明显优于文献[14 ,17 ]中的结果,并且其计算值非常接近于系统最大允许时滞上界理论值,如图4 所示. ...
... 从表3 中可以看出,处于定常时滞(u =0)的情况下,当LFC系统中的控制增益参数K P 、K I 分别给定不同值时,应用本文新判据得出的仿真结果明显优于文献[14 ,17 ]中的结果,并且其计算值非常接近于系统最大允许时滞上界理论值,如图4 所示. ...
... 从图4 中可以看出,当τ= 3.472 s时,经过LFC系统的二次调频使系统频率偏差快速收敛到0,这说明通过文献[14 ]中的稳定判据得到的系统仿真结果非常保守,而当τ= 3.950 s时,系统频率偏差仍然呈收敛趋势,但是保守性得到了极大改善,当τ= 4.050 s时,系统频率偏差呈发散状态,这意味着当K P =K I =0.4,u =0时,该系统的时滞稳定上界取值范围在3.950~4.050 s.然而,应用本文新判据获得的时滞稳定上界为3.980 s,这说明应用本文新判据获得的最大允许时滞上界非常接近于理论值,同时,也充分证明了本文新判据的正确性.事实上,当τ= 3.980 s时,K P =K I =0.4,u =0时系统频率偏差如图5 所示. ...
基于Wirtinger不等式的时变时滞电力系统稳定性分析
2
2016
... (1) 原动机模型.简化的传递函数式为[15 -16 ] ...
... 给定不同u时的系统时滞上界τ
max u 0.1 0.2 0.5 0.8 文献[15 ] 4.724 3.87 2.67 2.56 文献[20 ] 4.841 4.163 3.284 2.835 文献[21 ] 4.939 — 3.298 2.869 文献[22 ] 4.945 — 3.314 2.882 文献[23 ]推论1情形(I) 4.946 4.279 3.337 2.918 文献[23 ]推论1情形(II) 4.966 4.319 3.395 2.983 本文定理2(N =1) 4.961 4.310 3.387 2.977 本文定理2(N =2) 4.984 4.354 3.444 3.015
由表1 可以看出,应用本文推导出的新判据,能让系统的保守性得到很大改善.当u =0.1,N =1时,基于本文定理2获得的最大时滞允许上界是4.961,由文献[23 ]中的推论1情形(I)得到的运算结果是4.946,改善率达到0.303%;而给定u =0.1时,文献[22 ]得出的运算结果与文献[21 ]相比提高了0.006,改善率仅为0.121%.上述对比结果说明,将本文新判据应用于二阶系统矩阵方程算例一中,确实降低了系统的保守性.另外,由图3 还可以进一步看出,由本文定理2(N =2)得出的系统最大允许时滞上界τ max 明显大于文献[23 ]推论1情形(II)与文献[22 ]中的结果,这充分说明了本文构造的时滞乘积型Lyapunov-Krasovskii泛函以及在界定泛函导数时所应用的扩展逆凸二次不等式方法在降低系统保守性方面与文献[22 -23 ]中的增广型Lyapunov-Krasovskii以及在界定泛函导数时所应用的其他方法相比具有明显优势.本文构造的时滞乘积型Lyapunov-Krasovskii泛函考虑了更多系统状态信息,并增大了矩阵P 12 和P 22 的自由度,而本文应用的扩展逆凸二次不等式方法在界定泛函导数中出现的积分项时,能使计算值更接近于理论值,从而有效降低了系统的保守性. ...
Stability analysis for power system with time-delay based on Wirtinger inequality
2
2016
... (1) 原动机模型.简化的传递函数式为[15 -16 ] ...
... 给定不同u时的系统时滞上界τ
max u 0.1 0.2 0.5 0.8 文献[15 ] 4.724 3.87 2.67 2.56 文献[20 ] 4.841 4.163 3.284 2.835 文献[21 ] 4.939 — 3.298 2.869 文献[22 ] 4.945 — 3.314 2.882 文献[23 ]推论1情形(I) 4.946 4.279 3.337 2.918 文献[23 ]推论1情形(II) 4.966 4.319 3.395 2.983 本文定理2(N =1) 4.961 4.310 3.387 2.977 本文定理2(N =2) 4.984 4.354 3.444 3.015
由表1 可以看出,应用本文推导出的新判据,能让系统的保守性得到很大改善.当u =0.1,N =1时,基于本文定理2获得的最大时滞允许上界是4.961,由文献[23 ]中的推论1情形(I)得到的运算结果是4.946,改善率达到0.303%;而给定u =0.1时,文献[22 ]得出的运算结果与文献[21 ]相比提高了0.006,改善率仅为0.121%.上述对比结果说明,将本文新判据应用于二阶系统矩阵方程算例一中,确实降低了系统的保守性.另外,由图3 还可以进一步看出,由本文定理2(N =2)得出的系统最大允许时滞上界τ max 明显大于文献[23 ]推论1情形(II)与文献[22 ]中的结果,这充分说明了本文构造的时滞乘积型Lyapunov-Krasovskii泛函以及在界定泛函导数时所应用的扩展逆凸二次不等式方法在降低系统保守性方面与文献[22 -23 ]中的增广型Lyapunov-Krasovskii以及在界定泛函导数时所应用的其他方法相比具有明显优势.本文构造的时滞乘积型Lyapunov-Krasovskii泛函考虑了更多系统状态信息,并增大了矩阵P 12 和P 22 的自由度,而本文应用的扩展逆凸二次不等式方法在界定泛函导数中出现的积分项时,能使计算值更接近于理论值,从而有效降低了系统的保守性. ...
电力系统改进时滞依赖型稳定判据
1
2008
... (1) 原动机模型.简化的传递函数式为[15 -16 ] ...
An improved delay-dependent stability criteria for power system with multiple time delays
1
2008
... (1) 原动机模型.简化的传递函数式为[15 -16 ] ...
基于PID负荷频率控制的电力系统时滞相关鲁棒稳定性分析
9
2019
... 式中,K P 、K I 与K D 分别为PID控制器的比例、积分与微分增益;u 和ACE分别为控制输出量和控制误差量;ACE可定义为[17 ] ...
... 综合上述所示,可得出简化的时滞LFC系统结构框图如图2 所示[17 ] . ...
... K
P 、K
I 分别取不同值时的系统时滞上界τ
max (u=0)
K P K I 0.05 0.40 1.00 定理2 (N =1) 文献[17 ] 文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 0 30.914 30.853 27.927 3.381 3.377 3.124 0.923 0.922 0.886 0.05 31.874 31.263 27.881 3.501 3.496 3.215 0.970 0.969 0.927 0.20 34.224 27.763 25.114 3.792 3.784 3.320 1.078 1.077 1.016 0.40 35.830 22.194 20.364 3.980 3.472 2.832 1.118 1.116 1.017 0.60 16.126 15.727 14.618 3.825 2.734 2.130 0.947 0.933 0.827 1.00 0.595 0.594 0.546 0.515 0.515 0.482 0.361 0.360 0.348
10.11985/2023.04.029.T0004 表4 KP 、KI 分别取不同值时的系统的时滞上界τmax (u=0.5) ...
... 文献[
17 ]
文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 0 30.914 30.853 27.927 3.381 3.377 3.124 0.923 0.922 0.886 0.05 31.874 31.263 27.881 3.501 3.496 3.215 0.970 0.969 0.927 0.20 34.224 27.763 25.114 3.792 3.784 3.320 1.078 1.077 1.016 0.40 35.830 22.194 20.364 3.980 3.472 2.832 1.118 1.116 1.017 0.60 16.126 15.727 14.618 3.825 2.734 2.130 0.947 0.933 0.827 1.00 0.595 0.594 0.546 0.515 0.515 0.482 0.361 0.360 0.348 10.11985/2023.04.029.T0004 表4 KP 、KI 分别取不同值时的系统的时滞上界τmax (u=0.5) ...
... 文献[
17 ]
文献[14 ] 0 30.914 30.853 27.927 3.381 3.377 3.124 0.923 0.922 0.886 0.05 31.874 31.263 27.881 3.501 3.496 3.215 0.970 0.969 0.927 0.20 34.224 27.763 25.114 3.792 3.784 3.320 1.078 1.077 1.016 0.40 35.830 22.194 20.364 3.980 3.472 2.832 1.118 1.116 1.017 0.60 16.126 15.727 14.618 3.825 2.734 2.130 0.947 0.933 0.827 1.00 0.595 0.594 0.546 0.515 0.515 0.482 0.361 0.360 0.348 10.11985/2023.04.029.T0004 表4 KP 、KI 分别取不同值时的系统的时滞上界τmax (u=0.5) ...
... K
P 、K
I 分别取不同值时的系统的时滞上界τ
max (u=0.5)
K P K I 0.05 0.40 1.00 定理2(N =1) 文献[17 ] 文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 0 29.689 27.324 26.374 3.236 2.962 2.854 0.852 0.743 0.674 0.05 30.647 27.240 26.054 3.353 3.068 2.960 0.899 0.785 0.715 0.20 32.844 22.524 21.384 3.625 3.212 2.956 0.997 0.853 0.783 0.40 33.700 14.868 14.108 3.726 2.578 2.176 0.990 0.768 0.696 0.60 3.249 5.574 4.693 3.203 1.090 1.029 0.726 0.554 0.502 1.00 0.508 0.435 0.408 0.448 0.390 0.365 0.329 0.300 0.280
从表3 中可以看出,处于定常时滞(u =0)的情况下,当LFC系统中的控制增益参数K P 、K I 分别给定不同值时,应用本文新判据得出的仿真结果明显优于文献[14 ,17 ]中的结果,并且其计算值非常接近于系统最大允许时滞上界理论值,如图4 所示. ...
... 文献[
17 ]
文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 0 29.689 27.324 26.374 3.236 2.962 2.854 0.852 0.743 0.674 0.05 30.647 27.240 26.054 3.353 3.068 2.960 0.899 0.785 0.715 0.20 32.844 22.524 21.384 3.625 3.212 2.956 0.997 0.853 0.783 0.40 33.700 14.868 14.108 3.726 2.578 2.176 0.990 0.768 0.696 0.60 3.249 5.574 4.693 3.203 1.090 1.029 0.726 0.554 0.502 1.00 0.508 0.435 0.408 0.448 0.390 0.365 0.329 0.300 0.280 从表3 中可以看出,处于定常时滞(u =0)的情况下,当LFC系统中的控制增益参数K P 、K I 分别给定不同值时,应用本文新判据得出的仿真结果明显优于文献[14 ,17 ]中的结果,并且其计算值非常接近于系统最大允许时滞上界理论值,如图4 所示. ...
... 文献[
17 ]
文献[14 ] 0 29.689 27.324 26.374 3.236 2.962 2.854 0.852 0.743 0.674 0.05 30.647 27.240 26.054 3.353 3.068 2.960 0.899 0.785 0.715 0.20 32.844 22.524 21.384 3.625 3.212 2.956 0.997 0.853 0.783 0.40 33.700 14.868 14.108 3.726 2.578 2.176 0.990 0.768 0.696 0.60 3.249 5.574 4.693 3.203 1.090 1.029 0.726 0.554 0.502 1.00 0.508 0.435 0.408 0.448 0.390 0.365 0.329 0.300 0.280 从表3 中可以看出,处于定常时滞(u =0)的情况下,当LFC系统中的控制增益参数K P 、K I 分别给定不同值时,应用本文新判据得出的仿真结果明显优于文献[14 ,17 ]中的结果,并且其计算值非常接近于系统最大允许时滞上界理论值,如图4 所示. ...
... 从表3 中可以看出,处于定常时滞(u =0)的情况下,当LFC系统中的控制增益参数K P 、K I 分别给定不同值时,应用本文新判据得出的仿真结果明显优于文献[14 ,17 ]中的结果,并且其计算值非常接近于系统最大允许时滞上界理论值,如图4 所示. ...
Delay-dependent robust stability of power system with PID load frequency control
9
2019
... 式中,K P 、K I 与K D 分别为PID控制器的比例、积分与微分增益;u 和ACE分别为控制输出量和控制误差量;ACE可定义为[17 ] ...
... 综合上述所示,可得出简化的时滞LFC系统结构框图如图2 所示[17 ] . ...
... K
P 、K
I 分别取不同值时的系统时滞上界τ
max (u=0)
K P K I 0.05 0.40 1.00 定理2 (N =1) 文献[17 ] 文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 0 30.914 30.853 27.927 3.381 3.377 3.124 0.923 0.922 0.886 0.05 31.874 31.263 27.881 3.501 3.496 3.215 0.970 0.969 0.927 0.20 34.224 27.763 25.114 3.792 3.784 3.320 1.078 1.077 1.016 0.40 35.830 22.194 20.364 3.980 3.472 2.832 1.118 1.116 1.017 0.60 16.126 15.727 14.618 3.825 2.734 2.130 0.947 0.933 0.827 1.00 0.595 0.594 0.546 0.515 0.515 0.482 0.361 0.360 0.348
10.11985/2023.04.029.T0004 表4 KP 、KI 分别取不同值时的系统的时滞上界τmax (u=0.5) ...
... 文献[
17 ]
文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 0 30.914 30.853 27.927 3.381 3.377 3.124 0.923 0.922 0.886 0.05 31.874 31.263 27.881 3.501 3.496 3.215 0.970 0.969 0.927 0.20 34.224 27.763 25.114 3.792 3.784 3.320 1.078 1.077 1.016 0.40 35.830 22.194 20.364 3.980 3.472 2.832 1.118 1.116 1.017 0.60 16.126 15.727 14.618 3.825 2.734 2.130 0.947 0.933 0.827 1.00 0.595 0.594 0.546 0.515 0.515 0.482 0.361 0.360 0.348 10.11985/2023.04.029.T0004 表4 KP 、KI 分别取不同值时的系统的时滞上界τmax (u=0.5) ...
... 文献[
17 ]
文献[14 ] 0 30.914 30.853 27.927 3.381 3.377 3.124 0.923 0.922 0.886 0.05 31.874 31.263 27.881 3.501 3.496 3.215 0.970 0.969 0.927 0.20 34.224 27.763 25.114 3.792 3.784 3.320 1.078 1.077 1.016 0.40 35.830 22.194 20.364 3.980 3.472 2.832 1.118 1.116 1.017 0.60 16.126 15.727 14.618 3.825 2.734 2.130 0.947 0.933 0.827 1.00 0.595 0.594 0.546 0.515 0.515 0.482 0.361 0.360 0.348 10.11985/2023.04.029.T0004 表4 KP 、KI 分别取不同值时的系统的时滞上界τmax (u=0.5) ...
... K
P 、K
I 分别取不同值时的系统的时滞上界τ
max (u=0.5)
K P K I 0.05 0.40 1.00 定理2(N =1) 文献[17 ] 文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 0 29.689 27.324 26.374 3.236 2.962 2.854 0.852 0.743 0.674 0.05 30.647 27.240 26.054 3.353 3.068 2.960 0.899 0.785 0.715 0.20 32.844 22.524 21.384 3.625 3.212 2.956 0.997 0.853 0.783 0.40 33.700 14.868 14.108 3.726 2.578 2.176 0.990 0.768 0.696 0.60 3.249 5.574 4.693 3.203 1.090 1.029 0.726 0.554 0.502 1.00 0.508 0.435 0.408 0.448 0.390 0.365 0.329 0.300 0.280
从表3 中可以看出,处于定常时滞(u =0)的情况下,当LFC系统中的控制增益参数K P 、K I 分别给定不同值时,应用本文新判据得出的仿真结果明显优于文献[14 ,17 ]中的结果,并且其计算值非常接近于系统最大允许时滞上界理论值,如图4 所示. ...
... 文献[
17 ]
文献[14 ] 定理2 (N =1) 文献[17 ] 文献[14 ] 0 29.689 27.324 26.374 3.236 2.962 2.854 0.852 0.743 0.674 0.05 30.647 27.240 26.054 3.353 3.068 2.960 0.899 0.785 0.715 0.20 32.844 22.524 21.384 3.625 3.212 2.956 0.997 0.853 0.783 0.40 33.700 14.868 14.108 3.726 2.578 2.176 0.990 0.768 0.696 0.60 3.249 5.574 4.693 3.203 1.090 1.029 0.726 0.554 0.502 1.00 0.508 0.435 0.408 0.448 0.390 0.365 0.329 0.300 0.280 从表3 中可以看出,处于定常时滞(u =0)的情况下,当LFC系统中的控制增益参数K P 、K I 分别给定不同值时,应用本文新判据得出的仿真结果明显优于文献[14 ,17 ]中的结果,并且其计算值非常接近于系统最大允许时滞上界理论值,如图4 所示. ...
... 文献[
17 ]
文献[14 ] 0 29.689 27.324 26.374 3.236 2.962 2.854 0.852 0.743 0.674 0.05 30.647 27.240 26.054 3.353 3.068 2.960 0.899 0.785 0.715 0.20 32.844 22.524 21.384 3.625 3.212 2.956 0.997 0.853 0.783 0.40 33.700 14.868 14.108 3.726 2.578 2.176 0.990 0.768 0.696 0.60 3.249 5.574 4.693 3.203 1.090 1.029 0.726 0.554 0.502 1.00 0.508 0.435 0.408 0.448 0.390 0.365 0.329 0.300 0.280 从表3 中可以看出,处于定常时滞(u =0)的情况下,当LFC系统中的控制增益参数K P 、K I 分别给定不同值时,应用本文新判据得出的仿真结果明显优于文献[14 ,17 ]中的结果,并且其计算值非常接近于系统最大允许时滞上界理论值,如图4 所示. ...
... 从表3 中可以看出,处于定常时滞(u =0)的情况下,当LFC系统中的控制增益参数K P 、K I 分别给定不同值时,应用本文新判据得出的仿真结果明显优于文献[14 ,17 ]中的结果,并且其计算值非常接近于系统最大允许时滞上界理论值,如图4 所示. ...
New results on stability analysis for systems with discrete distributed delay
1
2015
... 引理1[18 ] :给定一个n ×n 实对称正定矩阵R α 、β (α<β )和向量值函数ω
Unified tuning of PID load frequency controller for power systems via IMC
1
2010
... 针对文献[19 ]中提出的PID控制器的时域性和鲁棒性与两个参数有关的结论,本节深入分析了PID参数对电力系统中LFC系统稳定性的影响. ...
基于改进型Bessel-Legendre不等式的电力系统时滞相关鲁棒稳定性研究
1
2021
... 给定不同u时的系统时滞上界τ
max u 0.1 0.2 0.5 0.8 文献[15 ] 4.724 3.87 2.67 2.56 文献[20 ] 4.841 4.163 3.284 2.835 文献[21 ] 4.939 — 3.298 2.869 文献[22 ] 4.945 — 3.314 2.882 文献[23 ]推论1情形(I) 4.946 4.279 3.337 2.918 文献[23 ]推论1情形(II) 4.966 4.319 3.395 2.983 本文定理2(N =1) 4.961 4.310 3.387 2.977 本文定理2(N =2) 4.984 4.354 3.444 3.015
由表1 可以看出,应用本文推导出的新判据,能让系统的保守性得到很大改善.当u =0.1,N =1时,基于本文定理2获得的最大时滞允许上界是4.961,由文献[23 ]中的推论1情形(I)得到的运算结果是4.946,改善率达到0.303%;而给定u =0.1时,文献[22 ]得出的运算结果与文献[21 ]相比提高了0.006,改善率仅为0.121%.上述对比结果说明,将本文新判据应用于二阶系统矩阵方程算例一中,确实降低了系统的保守性.另外,由图3 还可以进一步看出,由本文定理2(N =2)得出的系统最大允许时滞上界τ max 明显大于文献[23 ]推论1情形(II)与文献[22 ]中的结果,这充分说明了本文构造的时滞乘积型Lyapunov-Krasovskii泛函以及在界定泛函导数时所应用的扩展逆凸二次不等式方法在降低系统保守性方面与文献[22 -23 ]中的增广型Lyapunov-Krasovskii以及在界定泛函导数时所应用的其他方法相比具有明显优势.本文构造的时滞乘积型Lyapunov-Krasovskii泛函考虑了更多系统状态信息,并增大了矩阵P 12 和P 22 的自由度,而本文应用的扩展逆凸二次不等式方法在界定泛函导数中出现的积分项时,能使计算值更接近于理论值,从而有效降低了系统的保守性. ...
Delay-dependent robust stability of power systems based on improved Bessel-Legendre inequality
1
2021
... 给定不同u时的系统时滞上界τ
max u 0.1 0.2 0.5 0.8 文献[15 ] 4.724 3.87 2.67 2.56 文献[20 ] 4.841 4.163 3.284 2.835 文献[21 ] 4.939 — 3.298 2.869 文献[22 ] 4.945 — 3.314 2.882 文献[23 ]推论1情形(I) 4.946 4.279 3.337 2.918 文献[23 ]推论1情形(II) 4.966 4.319 3.395 2.983 本文定理2(N =1) 4.961 4.310 3.387 2.977 本文定理2(N =2) 4.984 4.354 3.444 3.015
由表1 可以看出,应用本文推导出的新判据,能让系统的保守性得到很大改善.当u =0.1,N =1时,基于本文定理2获得的最大时滞允许上界是4.961,由文献[23 ]中的推论1情形(I)得到的运算结果是4.946,改善率达到0.303%;而给定u =0.1时,文献[22 ]得出的运算结果与文献[21 ]相比提高了0.006,改善率仅为0.121%.上述对比结果说明,将本文新判据应用于二阶系统矩阵方程算例一中,确实降低了系统的保守性.另外,由图3 还可以进一步看出,由本文定理2(N =2)得出的系统最大允许时滞上界τ max 明显大于文献[23 ]推论1情形(II)与文献[22 ]中的结果,这充分说明了本文构造的时滞乘积型Lyapunov-Krasovskii泛函以及在界定泛函导数时所应用的扩展逆凸二次不等式方法在降低系统保守性方面与文献[22 -23 ]中的增广型Lyapunov-Krasovskii以及在界定泛函导数时所应用的其他方法相比具有明显优势.本文构造的时滞乘积型Lyapunov-Krasovskii泛函考虑了更多系统状态信息,并增大了矩阵P 12 和P 22 的自由度,而本文应用的扩展逆凸二次不等式方法在界定泛函导数中出现的积分项时,能使计算值更接近于理论值,从而有效降低了系统的保守性. ...
Stability analysis of systems with time-varying delay:A quadratic-partitioning method
3
2019
... 给定不同u时的系统时滞上界τ
max u 0.1 0.2 0.5 0.8 文献[15 ] 4.724 3.87 2.67 2.56 文献[20 ] 4.841 4.163 3.284 2.835 文献[21 ] 4.939 — 3.298 2.869 文献[22 ] 4.945 — 3.314 2.882 文献[23 ]推论1情形(I) 4.946 4.279 3.337 2.918 文献[23 ]推论1情形(II) 4.966 4.319 3.395 2.983 本文定理2(N =1) 4.961 4.310 3.387 2.977 本文定理2(N =2) 4.984 4.354 3.444 3.015
由表1 可以看出,应用本文推导出的新判据,能让系统的保守性得到很大改善.当u =0.1,N =1时,基于本文定理2获得的最大时滞允许上界是4.961,由文献[23 ]中的推论1情形(I)得到的运算结果是4.946,改善率达到0.303%;而给定u =0.1时,文献[22 ]得出的运算结果与文献[21 ]相比提高了0.006,改善率仅为0.121%.上述对比结果说明,将本文新判据应用于二阶系统矩阵方程算例一中,确实降低了系统的保守性.另外,由图3 还可以进一步看出,由本文定理2(N =2)得出的系统最大允许时滞上界τ max 明显大于文献[23 ]推论1情形(II)与文献[22 ]中的结果,这充分说明了本文构造的时滞乘积型Lyapunov-Krasovskii泛函以及在界定泛函导数时所应用的扩展逆凸二次不等式方法在降低系统保守性方面与文献[22 -23 ]中的增广型Lyapunov-Krasovskii以及在界定泛函导数时所应用的其他方法相比具有明显优势.本文构造的时滞乘积型Lyapunov-Krasovskii泛函考虑了更多系统状态信息,并增大了矩阵P 12 和P 22 的自由度,而本文应用的扩展逆凸二次不等式方法在界定泛函导数中出现的积分项时,能使计算值更接近于理论值,从而有效降低了系统的保守性. ...
... 由表1 可以看出,应用本文推导出的新判据,能让系统的保守性得到很大改善.当u =0.1,N =1时,基于本文定理2获得的最大时滞允许上界是4.961,由文献[23 ]中的推论1情形(I)得到的运算结果是4.946,改善率达到0.303%;而给定u =0.1时,文献[22 ]得出的运算结果与文献[21 ]相比提高了0.006,改善率仅为0.121%.上述对比结果说明,将本文新判据应用于二阶系统矩阵方程算例一中,确实降低了系统的保守性.另外,由图3 还可以进一步看出,由本文定理2(N =2)得出的系统最大允许时滞上界τ max 明显大于文献[23 ]推论1情形(II)与文献[22 ]中的结果,这充分说明了本文构造的时滞乘积型Lyapunov-Krasovskii泛函以及在界定泛函导数时所应用的扩展逆凸二次不等式方法在降低系统保守性方面与文献[22 -23 ]中的增广型Lyapunov-Krasovskii以及在界定泛函导数时所应用的其他方法相比具有明显优势.本文构造的时滞乘积型Lyapunov-Krasovskii泛函考虑了更多系统状态信息,并增大了矩阵P 12 和P 22 的自由度,而本文应用的扩展逆凸二次不等式方法在界定泛函导数中出现的积分项时,能使计算值更接近于理论值,从而有效降低了系统的保守性. ...
... 给定不同u时的系统时滞上界τ
max u 0.1 0.2 0.5 0.8 文献[21 ] 7.401 4.765 2.709 2.091 文献[23 ]推论1 情形(I) 7.428 4.825 2.749 2.114 文献[23 ]推论1情形(II) 7.572 4.947 2.801 2.137 本文定理2(N =1) 7.538 4.923 2.797 2.136 本文定理2(N =2) 7.600 4.959 2.813 2.146
将本文新判据应用于二阶系统矩阵算例二中进行仿真后发现,本文新判据在算例二中也能减小系统的保守性. ...
Stability analysis of systems with time-varying delay via novel augmented Lyapunov-Krasovskii functionals and an improved integral inequality
4
2019
... 给定不同u时的系统时滞上界τ
max u 0.1 0.2 0.5 0.8 文献[15 ] 4.724 3.87 2.67 2.56 文献[20 ] 4.841 4.163 3.284 2.835 文献[21 ] 4.939 — 3.298 2.869 文献[22 ] 4.945 — 3.314 2.882 文献[23 ]推论1情形(I) 4.946 4.279 3.337 2.918 文献[23 ]推论1情形(II) 4.966 4.319 3.395 2.983 本文定理2(N =1) 4.961 4.310 3.387 2.977 本文定理2(N =2) 4.984 4.354 3.444 3.015
由表1 可以看出,应用本文推导出的新判据,能让系统的保守性得到很大改善.当u =0.1,N =1时,基于本文定理2获得的最大时滞允许上界是4.961,由文献[23 ]中的推论1情形(I)得到的运算结果是4.946,改善率达到0.303%;而给定u =0.1时,文献[22 ]得出的运算结果与文献[21 ]相比提高了0.006,改善率仅为0.121%.上述对比结果说明,将本文新判据应用于二阶系统矩阵方程算例一中,确实降低了系统的保守性.另外,由图3 还可以进一步看出,由本文定理2(N =2)得出的系统最大允许时滞上界τ max 明显大于文献[23 ]推论1情形(II)与文献[22 ]中的结果,这充分说明了本文构造的时滞乘积型Lyapunov-Krasovskii泛函以及在界定泛函导数时所应用的扩展逆凸二次不等式方法在降低系统保守性方面与文献[22 -23 ]中的增广型Lyapunov-Krasovskii以及在界定泛函导数时所应用的其他方法相比具有明显优势.本文构造的时滞乘积型Lyapunov-Krasovskii泛函考虑了更多系统状态信息,并增大了矩阵P 12 和P 22 的自由度,而本文应用的扩展逆凸二次不等式方法在界定泛函导数中出现的积分项时,能使计算值更接近于理论值,从而有效降低了系统的保守性. ...
... 由表1 可以看出,应用本文推导出的新判据,能让系统的保守性得到很大改善.当u =0.1,N =1时,基于本文定理2获得的最大时滞允许上界是4.961,由文献[23 ]中的推论1情形(I)得到的运算结果是4.946,改善率达到0.303%;而给定u =0.1时,文献[22 ]得出的运算结果与文献[21 ]相比提高了0.006,改善率仅为0.121%.上述对比结果说明,将本文新判据应用于二阶系统矩阵方程算例一中,确实降低了系统的保守性.另外,由图3 还可以进一步看出,由本文定理2(N =2)得出的系统最大允许时滞上界τ max 明显大于文献[23 ]推论1情形(II)与文献[22 ]中的结果,这充分说明了本文构造的时滞乘积型Lyapunov-Krasovskii泛函以及在界定泛函导数时所应用的扩展逆凸二次不等式方法在降低系统保守性方面与文献[22 -23 ]中的增广型Lyapunov-Krasovskii以及在界定泛函导数时所应用的其他方法相比具有明显优势.本文构造的时滞乘积型Lyapunov-Krasovskii泛函考虑了更多系统状态信息,并增大了矩阵P 12 和P 22 的自由度,而本文应用的扩展逆凸二次不等式方法在界定泛函导数中出现的积分项时,能使计算值更接近于理论值,从而有效降低了系统的保守性. ...
... ]推论1情形(II)与文献[22 ]中的结果,这充分说明了本文构造的时滞乘积型Lyapunov-Krasovskii泛函以及在界定泛函导数时所应用的扩展逆凸二次不等式方法在降低系统保守性方面与文献[22 -23 ]中的增广型Lyapunov-Krasovskii以及在界定泛函导数时所应用的其他方法相比具有明显优势.本文构造的时滞乘积型Lyapunov-Krasovskii泛函考虑了更多系统状态信息,并增大了矩阵P 12 和P 22 的自由度,而本文应用的扩展逆凸二次不等式方法在界定泛函导数中出现的积分项时,能使计算值更接近于理论值,从而有效降低了系统的保守性. ...
... ]中的结果,这充分说明了本文构造的时滞乘积型Lyapunov-Krasovskii泛函以及在界定泛函导数时所应用的扩展逆凸二次不等式方法在降低系统保守性方面与文献[22 -23 ]中的增广型Lyapunov-Krasovskii以及在界定泛函导数时所应用的其他方法相比具有明显优势.本文构造的时滞乘积型Lyapunov-Krasovskii泛函考虑了更多系统状态信息,并增大了矩阵P 12 和P 22 的自由度,而本文应用的扩展逆凸二次不等式方法在界定泛函导数中出现的积分项时,能使计算值更接近于理论值,从而有效降低了系统的保守性. ...
Improved negativity condition for a quadratic function and its application to systems with time-varying delay
7
2020
... 给定不同u时的系统时滞上界τ
max u 0.1 0.2 0.5 0.8 文献[15 ] 4.724 3.87 2.67 2.56 文献[20 ] 4.841 4.163 3.284 2.835 文献[21 ] 4.939 — 3.298 2.869 文献[22 ] 4.945 — 3.314 2.882 文献[23 ]推论1情形(I) 4.946 4.279 3.337 2.918 文献[23 ]推论1情形(II) 4.966 4.319 3.395 2.983 本文定理2(N =1) 4.961 4.310 3.387 2.977 本文定理2(N =2) 4.984 4.354 3.444 3.015
由表1 可以看出,应用本文推导出的新判据,能让系统的保守性得到很大改善.当u =0.1,N =1时,基于本文定理2获得的最大时滞允许上界是4.961,由文献[23 ]中的推论1情形(I)得到的运算结果是4.946,改善率达到0.303%;而给定u =0.1时,文献[22 ]得出的运算结果与文献[21 ]相比提高了0.006,改善率仅为0.121%.上述对比结果说明,将本文新判据应用于二阶系统矩阵方程算例一中,确实降低了系统的保守性.另外,由图3 还可以进一步看出,由本文定理2(N =2)得出的系统最大允许时滞上界τ max 明显大于文献[23 ]推论1情形(II)与文献[22 ]中的结果,这充分说明了本文构造的时滞乘积型Lyapunov-Krasovskii泛函以及在界定泛函导数时所应用的扩展逆凸二次不等式方法在降低系统保守性方面与文献[22 -23 ]中的增广型Lyapunov-Krasovskii以及在界定泛函导数时所应用的其他方法相比具有明显优势.本文构造的时滞乘积型Lyapunov-Krasovskii泛函考虑了更多系统状态信息,并增大了矩阵P 12 和P 22 的自由度,而本文应用的扩展逆凸二次不等式方法在界定泛函导数中出现的积分项时,能使计算值更接近于理论值,从而有效降低了系统的保守性. ...
... 文献[
23 ]推论1情形(II)
4.966 4.319 3.395 2.983 本文定理2(N =1) 4.961 4.310 3.387 2.977 本文定理2(N =2) 4.984 4.354 3.444 3.015 由表1 可以看出,应用本文推导出的新判据,能让系统的保守性得到很大改善.当u =0.1,N =1时,基于本文定理2获得的最大时滞允许上界是4.961,由文献[23 ]中的推论1情形(I)得到的运算结果是4.946,改善率达到0.303%;而给定u =0.1时,文献[22 ]得出的运算结果与文献[21 ]相比提高了0.006,改善率仅为0.121%.上述对比结果说明,将本文新判据应用于二阶系统矩阵方程算例一中,确实降低了系统的保守性.另外,由图3 还可以进一步看出,由本文定理2(N =2)得出的系统最大允许时滞上界τ max 明显大于文献[23 ]推论1情形(II)与文献[22 ]中的结果,这充分说明了本文构造的时滞乘积型Lyapunov-Krasovskii泛函以及在界定泛函导数时所应用的扩展逆凸二次不等式方法在降低系统保守性方面与文献[22 -23 ]中的增广型Lyapunov-Krasovskii以及在界定泛函导数时所应用的其他方法相比具有明显优势.本文构造的时滞乘积型Lyapunov-Krasovskii泛函考虑了更多系统状态信息,并增大了矩阵P 12 和P 22 的自由度,而本文应用的扩展逆凸二次不等式方法在界定泛函导数中出现的积分项时,能使计算值更接近于理论值,从而有效降低了系统的保守性. ...
... 由表1 可以看出,应用本文推导出的新判据,能让系统的保守性得到很大改善.当u =0.1,N =1时,基于本文定理2获得的最大时滞允许上界是4.961,由文献[23 ]中的推论1情形(I)得到的运算结果是4.946,改善率达到0.303%;而给定u =0.1时,文献[22 ]得出的运算结果与文献[21 ]相比提高了0.006,改善率仅为0.121%.上述对比结果说明,将本文新判据应用于二阶系统矩阵方程算例一中,确实降低了系统的保守性.另外,由图3 还可以进一步看出,由本文定理2(N =2)得出的系统最大允许时滞上界τ max 明显大于文献[23 ]推论1情形(II)与文献[22 ]中的结果,这充分说明了本文构造的时滞乘积型Lyapunov-Krasovskii泛函以及在界定泛函导数时所应用的扩展逆凸二次不等式方法在降低系统保守性方面与文献[22 -23 ]中的增广型Lyapunov-Krasovskii以及在界定泛函导数时所应用的其他方法相比具有明显优势.本文构造的时滞乘积型Lyapunov-Krasovskii泛函考虑了更多系统状态信息,并增大了矩阵P 12 和P 22 的自由度,而本文应用的扩展逆凸二次不等式方法在界定泛函导数中出现的积分项时,能使计算值更接近于理论值,从而有效降低了系统的保守性. ...
... 明显大于文献[23 ]推论1情形(II)与文献[22 ]中的结果,这充分说明了本文构造的时滞乘积型Lyapunov-Krasovskii泛函以及在界定泛函导数时所应用的扩展逆凸二次不等式方法在降低系统保守性方面与文献[22 -23 ]中的增广型Lyapunov-Krasovskii以及在界定泛函导数时所应用的其他方法相比具有明显优势.本文构造的时滞乘积型Lyapunov-Krasovskii泛函考虑了更多系统状态信息,并增大了矩阵P 12 和P 22 的自由度,而本文应用的扩展逆凸二次不等式方法在界定泛函导数中出现的积分项时,能使计算值更接近于理论值,从而有效降低了系统的保守性. ...
... -23 ]中的增广型Lyapunov-Krasovskii以及在界定泛函导数时所应用的其他方法相比具有明显优势.本文构造的时滞乘积型Lyapunov-Krasovskii泛函考虑了更多系统状态信息,并增大了矩阵P 12 和P 22 的自由度,而本文应用的扩展逆凸二次不等式方法在界定泛函导数中出现的积分项时,能使计算值更接近于理论值,从而有效降低了系统的保守性. ...
... 给定不同u时的系统时滞上界τ
max u 0.1 0.2 0.5 0.8 文献[21 ] 7.401 4.765 2.709 2.091 文献[23 ]推论1 情形(I) 7.428 4.825 2.749 2.114 文献[23 ]推论1情形(II) 7.572 4.947 2.801 2.137 本文定理2(N =1) 7.538 4.923 2.797 2.136 本文定理2(N =2) 7.600 4.959 2.813 2.146
将本文新判据应用于二阶系统矩阵算例二中进行仿真后发现,本文新判据在算例二中也能减小系统的保守性. ...
... 文献[
23 ]推论1情形(II)
7.572 4.947 2.801 2.137 本文定理2(N =1) 7.538 4.923 2.797 2.136 本文定理2(N =2) 7.600 4.959 2.813 2.146 将本文新判据应用于二阶系统矩阵算例二中进行仿真后发现,本文新判据在算例二中也能减小系统的保守性. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}