1 引言
传统飞机发动机产生的能量主要用于飞机飞行推力、航空电子设备供电等目的,近年来,由于全球环境保护和绿色航空的要求,飞机机载设备用电功率需求快速增加带来了多电化和全电化需求。继飞机二次能源逐步统一为电能形式,从而形成多/全电飞机之后,未来电推进技术成为飞机动力系统电气化的重要发展方向[1 ] 。与传统发动机推进系统相比,分布式电推进系统具有更高的效率和功率重量比。在实现飞机电推进技术全电化之前,目前由于电池等储能装置有限的能量密度,涡轮电推进技术是一个可行方案。因此,利用飞机发动机和推进电机之间的协同作用来改善飞机整体飞行性能的混合分布式电推进系统被提出[2 ] ,有望进一步简化飞机能源动力系统结构,提高飞机动力系统能量转换效率,降低燃油消耗和排放,该技术代表了航空电气化的高级发展阶段。
通常来说,分布式飞机电推进系统具有以下优点[3 ] :① 分布式电驱动的动力总成系统的体积更小、质量更轻,而且结构非常简单,有的系统甚至仅需要一个活动部件,而传统的活塞、涡轮发动机则复杂很多,至少需要冷却系统、电气系统、液压系统以及燃油系统等不同子系统配置;② 采用分布式电推进系统可以降低飞机动力系统的复杂度,从而减少维修保养的需求和成本;③ 分布式电驱动的动力总成系统能效基本可以达到90%~95%,而传统内燃机动力系统的能效在30%~40%,差距大约为3倍;④ 分布式电驱动动力系统在运行时比内燃机驱动动力系统噪声要小得多,可满足多种任务需求。
飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] 。基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标。现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点。从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究。飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] 。飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求。因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂。飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配。文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能。文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标。文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算。文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术。文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题。在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标。文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化。文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制。除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去。基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性。此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中。通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现。
本文主要提出了一种基于分层模型预测控制算法,并针对混合动力分布式电推进飞机系统架构,提出能量管理优化目标,将燃油消耗和飞机代偿影响因素考虑在内,完成在电推进系统能源配置有限的情况下,进行混合能源系统的“削峰填谷”,改善电推进系统工作点,同时实现电推进飞机电网能量的动静态特性的优化控制,增加负载需求侧能量管理的控制变量,将顶层MPC优化问题等效为混合整数二次规划问题(MIQP),达到对于分布式混合电推进飞机的动态能量优化管理的目的。本文通过理论分析、建模仿真以及最终的半物理仿真平台验证了所提理论的正确性。第1节为引言部分,介绍研究背景现状及目的;第2节讨论了典型分布式电推进飞机的电力系统架构和飞行功率需求,给出了分布式混合电推进飞机能量管理的问题描述;第3节给出了电力系统能量管理策略研究,提出了分层模型预测控制方法,保证系统的稳态和动态特性,同时给出了基于规则的能量管理策略作为能量管理策略的比较基线;基于前面理论分析,第4节建立了混合电推进飞机电力系统的数学模型并进行了数字仿真,初步验证了理论分析的结果;第5节搭建了地面缩比的半物理仿真平台,验证了所提能量管理策略理论分析和数字仿真的正确性;第6节给出了研究结论。
2 分布式混合电推进飞机能量管理问题描述
本文研究的对象是中小型电推进飞机如X-57或P2006T级别的飞机。这类飞机具有电推进系统结构相对简单、航程短、控制系统复杂度低和可靠性高等特点,但是可以对混合涡轮电推进系统能量管理关键技术进行验证。所选分布式混合涡轮电推进飞机的架构设计如图1 所示,系统参数如表1 所示。此架构为典型的串联式电推进系统架构,由燃油发动机驱动发电机和电池组提供系统的电能源,推进方式为涵道风扇,由位于翼尖的两组主推进电机和两侧的四台辅助电机构成,有效载荷根据任务特性的不同可以为飞行或各类电子设备提供可靠电能。
图1
这种分布式电推进系统的工作方式如下:在起飞和着陆阶段,6台推进电机都会工作;在巡航阶段,只有位于翼梢的两台主电机工作,当需要执行加速等任务时,其余分布式电机可提供额外推力。其优点为:额外的电机会为机翼提供额外的吸入气流,这会产生更大的升力,机翼面积也就可以更窄;当主电机故障时,仍有其他电机可提供动力,动力可靠性有所提高。
混合涡轮电推进飞机的能量来源完全依靠所携带燃油的化学能和电池组初始状态的电能,能量消耗大部分用于推进机体起飞、爬升、巡航和飞控作动,其余部分用于飞机上的电子设备。
本文所研究的混合电推进飞机电力系统架构如图2 所示,电力系统包含两台涡轮驱动的交流发电机,经过AC/DC整流器变为高压直流系统接入到汇流条,动力电池组通过双向功率变换器接入高压直流汇流条,系统通过控制电池组实现对系统能量和功率优化调节,关键系统参数定义如表2 所示。
图2
其他参数包括,燃油的性能参数:密度ρ fuel =0.82 kg/L,热值ζ fuel =43.1 MJ/kg,热效率η pt =25%。动力电池组的性能:电池单体能量密度达到250 (W·h)/kg,充电倍率v B,C =2C ,放电倍率v B,dc =0~5C ,5~10C (100 s)。
根据一般电推进飞机的负载变化形式将其负载类型分为四类:功率需求较大但变化率较小的推进系统载荷,功率需求不大但变化率较大的作动系统,功率需求较大和变化率也较大的关键电子负载,功率需求较小变化率也较小的非关键电子负载。图3 显示了典型混合电推进飞机的负载任务剖面图。
图3
电推进飞机飞控作动系统只有在飞机做机体姿态调整时才会有大功率的任务需求调整,比如起飞、爬升阶段的升力调整,巡航阶段的方向调整和机动动作,下降和着陆阶段的阻力调整等,这些作动动作依靠电机驱动的机械作动器完成,具有转动力矩大、调节精度高的特点,整体功率需求相对于其他系统较小,但在调节过程中会出现较大的功率脉冲,严重影响系统的能量稳定性,对于高压直流汇流条电压的稳定平衡也具有相当大的挑战。电子负载分为关键和非关键两类,其中非关键部分所占比重不大,为了方便系统能量的整体管理,把这一部分统一到一条可控低压直流汇流条上,在任务需求不严格时可将其屏蔽。由于机载电子设备的需求功率根据任务形式的不同而有较大的变化,比如机载雷达的不同工作模式、环控系统的不同工作状态、飞控和航电系统的不同运行要求等,这些功率需求的不确定性使得在电力系统功率模型建立时按照功率需求变化较大和变化率也较大的方式进行处理,非关键电子负载由于比重不大,所以其影响相对较小,只有在投切状态时对系统有影响。为了实现分布式电推进飞机在特定飞行包线下,燃油消耗最小,同时满足在负载发生瞬时变化时,高压直流母线电压保持稳定,需要设计相应的能量管理控制算法,通过调节蓄电池和负载侧功率需求实现这些目标。
根据以上分析,分布式电推进飞机能量管理控制方法设计存在以下难点。
(1) 混合电推进飞机系统存在用电负载功率的大范围变化,且机载电力系统功率容量相比较于推进功率的变化需求,其能量裕度并不大。
(2) 由于脉冲性和阶跃性电功率负载的存在,导致电力系统存在“叠加峰值”,这在电推进飞机任务功率段尤为明显。
(3) 某些飞行任务阶段负载具有短时脉冲特征,导致高压直流汇流条电压在负载功率瞬时变化时存在波动。
(4) 电推进飞机能源管理控制系统的能量约束问题,由于发电机和蓄电池组功率有限,并且电池组的SOC也要在合适的范围内,不允许存在过充和过放现象,此外电气负载切换也存在优先级考虑。
混合分布式电推进飞机的动态能量管理过程需要分为两类,一类是对长时较大功率变化任务剖面的供能方式提前进行能量规划和优化管理,以满足涡轮电推进系统燃油消耗最小的优化目标;另一类是对短时脉冲类任务负载剖面进行瞬时控制和对短时负载功率波动进行控制,以满足电力系统直流汇流条电压稳定,满足电力系统的各种能量约束条件。
3 电推进系统能量管理控制策略设计
3.1 模型预测控制策略
模型预测控制(Model predictive control,MPC)是一种超前反馈滚动优化控制策略,该控制策略能够根据当前已有的信息对系统的未来动态进行预测[35 ] 。在每个采样周期内,MPC 都要求解一个有限时域开环最优问题,该问题的解就是系统的最优控制序列,得到控制序列后,在下一采样时刻将序列中的第一个元素作用于系统,同时滚动更新被控系统信息,在新一周期重复上面的过程,MPC控制器基本原理框图如图4 所示。MPC能够处理多输入多输出以及存在约束的系统。
图4
根据以上的控制器系统的基本结构设计了基于分层MPC的能量管理架构,如图5 所示,机载多脉波自耦变压整流器(ATRU)将交流电压115 V/400 Hz从同步发电机转换为270 V高压直流电压,输出到高压直流汇流条;双向DC/DC变换器通过滤波电感连接到蓄电池系统;负载侧驱动涵道风扇和作动器的电机均为感性负载,由等效电感表示,而机载用电设备电子负载等效为恒功率负载;图5 中所有功率变换器滤波电容器集中在一起,由一个等效电容表示,以便于电力系统建模。顶层MPC提前计算飞机电源系统功率配置,主要是主发电机组和蓄电池组的功率设定点,低层MPC控制连接到蓄电池组的双向功率变换器控制端,其产生占空比命令和主发电机组控制信号、连接非关键负载的固态功率控制器(SSPC)开关信号。根据电源系统的功率设置点,顶层MPC向低层MPC发送电流参考值,这可能随着时间的推移而变化。这是MPC两个层次之间的连接点,通过这个连接点,较高层级的MPC可以影响到较低层级的MPC控制器。
图5
3.1.1 气体动力学模型
顶层模型预测控制器用于电推进系统架构层面能源的优化,体现的是电推进飞机系统负载侧和能源供给侧的功率平衡关系,在满足飞机飞行任务功率需求的同时,合理配置飞机能源系统的能量供应,减少总能量消耗尤其是燃油的使用消耗量。
其主要控制变量被分成两类。一类是电推进飞机电源系统的功率输出决策,燃油发电机组的消耗燃油的能量输入P M ,电池组的充放电模式的能量状态P B ;一类是发电机组投切状态d G1 、d G2 和负载侧主要是非关键电子负载的屏蔽状态信号d s ,这部分的控制量大多是开关量信号,即0,1逻辑控制信号。
飞机电源系统即发电机组和电池组的状态被分为如表3 所示的几种状态。从负载功率等级的大小合理配置电源供给侧的能源分配,这些情况没有考虑发电机组的故障情况。表3 中,0表示不工作状态,1表示工作状态。
分布式电推进飞机顶层能量管理状态图如图6 所示,给出了混合电力系统稳态功率流方程。
(1) P B ( k ) + P G ( k ) = P VL ( k ) + P NVL ( k ) + P push ( k ) + P act ( k )
式中,索引k 表示n p 个步长之外的k 步预测,控制采样时间T C 比底层MPC高得多。这通常可以在T C =1~10 s的范围甚至更高水平范围内进行,尽管可以实现更短的时间间隔以实时实现,但对于分布式电推进飞机而言,其任务功率剖面的变化是缓和的,即设定的任务不会在极短时间内做出大范围的功率变化。
图6
电推进飞机燃油通过涡轮给发电机组提供能量,其燃油量和能量的变化情况表示为
(2) ζ fuel d Q fuel d t = P M
式中,ζ fuel 是燃油能量转化系数,J/kg;dQ fuel /dt 是单位采样周期内的燃油消耗量;P M 是输入到发电机组的功率。
考虑到飞机各种部件,特别是主发电机组和整流器的模型可能非常复杂。在设计顶层MPC时,可以从顶层能量管理分配来看,主发电系统的输出功率随控制命令而变化,这与动态系统的时间常数有关。为简明起见,考虑了简单的一阶动态特性的主发电系统的功率方程为
(3) d P G d t = 1 T G ( P M − P G )
式中,T G 为主发电机组的时间常数;P G 是主发电机组的输出功率。
忽略充放电过程中的功率损耗,电池能量系统在瞬间k 时刻存储的预测能量可以表示为
(4) E Bat ( k ) = E Bat,0 − T C ∑ j = 1 k P Bat ( j )
式中,变量E Bat (k )与荷电状态(SOC(k ))有关,即
(5) SOC ( k ) = E Bat ( k ) E Bat,max
(6) dSOC d t = − 1 E Bat,max P B
因为MPC控制器在第k+ 1时刻的预测值与第k 时刻的值相关,可以采用后向欧拉积分法进行方程的离散化处理,应用于式(7),得到以下离散时间方程。
(7) Q fuel ( k + 1 ) = Q fuel ( k ) + T C ζ fuel P M ( k + 1 ) P G ( k + 1 ) = T G T C + T G P M ( k ) + T G T C + T G P M ( k + 1 ) SOC ( k + 1 ) = SOC ( k ) + − T G E Bat,max P B ( k + 1 )
(8) P G ( k + 1 ) Q fuel ( k + 1 ) SOC ( k + 1 ) = A P G ( k ) Q fuel ( k ) SOC ( k ) + B P M ( k + 1 ) P B ( k + 1 )
式中,发电机组的输出功率P G 、燃油剩余量Q fuel 、电池组SOC为预测模型的状态变量,发电机组的输入功率P M 、电池组的实时功率P B 为预测模型的决策变量,A B
(9) A = T G T C + T G 0 0 0 1 0 0 0 1 B = T C T C + T G 0 T C ζ f u e l 0 0 − T G E B a t , m a x
相对于以上发电机组的输出功率P G 、燃油剩余量Q fuel 、电池组SOC是一种连续变量,与k+ 1时刻的状态和k 时刻的状态密切相关,而发电机组汇流条的SSPC控制开关是一种离散量,与k+ 1时刻的状态和k 时刻的状态无关,只与k+ 1时刻的系统控制要求有关,所以对于发电机组的控制状态d G1 、d G2 和非关键电子负载的控制状态来说,它们的控制形式如下
(10) d G 1 ( k + 1 ) d G 2 ( k + 1 ) d S ( k + 1 ) = d G 1 ( k + 1 ) d G 2 ( k + 1 ) d S ( k + 1 ) MPC
即开关量状态信号作为控制信号时,是根据顶层MPC控制器决定的,是一种基于未来滚动优化而做出的系统决策。当电推进飞机负载功率需求逐渐增大时,要求发电机组输出更多的能量,这时可提前投入双发电机和电池组进行供能;如果负载需求更大时,提前切除非关键电子负载可有效达到需求功率以完成预定飞行任务。
控制系统的目标输出包含两部分,一部分是电源系统的输出功率P E ,作为和负载功率P L 的对比以便进行反馈矫正;另一个是电推进系统的能量剩余容量E last ,为了方便进行系统下一步的能量调度。两者的表达式为
(11) P E ( k + 1 ) E l a s t ( k + 1 ) = C P G ( k ) Q f u e l ( k ) S O C ( k ) + D P M ( k + 1 ) P B ( k + 1 ) C = 0 0 0 0 ζ f u e l E B a t , m a x D = 1 1 0 0
式中,C D
以上的功率控制和开关状态是由顶层MPC控制器通过在线系统优化做出的决策,这是MPC控制最主要的部分。
飞机分布式电推进电力系统的在线决策是一个复杂的多变量优化问题,顶层MPC在设计时制定了两个优化目标。一个目标是将主发电机的发电成本,即燃油消耗量降到最低和将电力输送相关的功率损失降到最低,本研究将发电成本视为发电功率的二次多项式函数,假定传递损失与载荷需求功率成正比,表示为
(12) P loss ( k ) = λ G ( P M ( k ) − P G ( k ) ) + λ B P B ( k ) 2 + λ L P Load ( k ) 2
式中,P loss (k )是k 时刻的电推进系统功率损失,这与发电机组的功率P M (k )、P G (k ),电池组的功率P B (k )以及负载侧的功率P load (k )有关;λ G 、λ B 、λ L 分别是发电机组、电池组和负载侧的功率损失系数。
但是燃油本身作为一种载荷,也是一个不可忽略的因素,对于本文所假定的分布式电推进飞机来说,燃油的携带量是飞机重量载荷的一个重要部分,它的影响可以用飞机燃油的质量代偿损失来表达,即燃油作为飞机重量载荷滞空时所消耗的等效燃油量,影响因素为
(13) Q fuel,cons = Q fuel,last f ( t last )
式中,Q fuel,cons 是电推进飞机剩余燃油量Q fuel,last 所消耗的等效燃油量,它还与飞行任务剩余时长t last 有关。飞机所执行的任务时长越久,所需要的燃油量也就越多,滞空时所消耗的等效燃油量也就越多,滞空时长的影响因素包括
(14) f ( t l a s t ) = exp D L · C e g · t last − 1
式中,D /L 是电推进飞机的升阻比;C e 是单位推力的燃油消耗率,在研究过程中属于边界条件,因此在本研究中均为常数。典型参数为D /L =5.5,C e =3.68×10-5 kg/(N·s)。
另一个优化目标是自适应地更新蓄电池组的能量储备水平,以便适当地满足未来的动态负载需求,而不是过多地保留蓄电池组的存储容量。因为电池组的重量是固定的,它属于飞机机体重量的固定载荷,所以此时并不考虑它的质量代偿损失。
作为能量管理的主要控制对象,电池组的决策目标主要是提供必要的能量补给和在非关键任务剖面时将燃油的能量转化为电能储存起来,降低燃油的滞空成本。但电推进飞机的任务要求不允许它有充分的时间和足够的充电功率去进行能量的补给,为此,电池组能量的最大使用效率与它的充放电功率和充电时间成本有关,在功率越大损耗越大的前提下,如何平衡充电时间和充电功率是电池组能量管理的优化目标。式(15)表达了这一矛盾。
(15) T B,charge = ∑ k = 1 N P β Bat SOC ( k ) P B ( k )
为使电池组达到预定的SOC,它的充电功率P B (k )越大,则充电时长T B,charge (k )越小。β Bat 是电池组的功率系数。
所以,可以将顶层MPC的成本函数定义为发电成本损失、燃油质量代偿损失和电池组充电时长损失的三者加权函数,表达式为
(16) min C = ∑ k = 1 N P α P P loss + α Q Q fuel,cons + α B,T T B,charge
式中,α P 、α Q 、α B,T 分别是系统功率损失、燃油质量代偿和电池组充电时长的权重系数,根据电推进飞机滞空时长的不同而处于动态调节的状态。
针对以上顶层MPC控制器的设计,考虑了以下的系统约束问题。
控制器的决策变量是主发电机和蓄电池组的功率设定值P M 、P B ,其功率具有上限,表达约束如下
(17) 0 ≤ P M ( k ) ≤ P M , max 0 ≤ P B ( k ) ≤ P B , max
式中,P M,max 是发电机组的输入功率,一般指两台发电机满载时的输出功率;P B,max 是电池组充放电的最大功率状态,由电池组的类型和容量决定。
其次考虑混合电源功率P G +P B 和负载功率P Load 的平衡关系,在电能传输的过程中存在功率损失,所以系统电功率具有以下状态
(18) P G ( k ) + P B ( k ) > P Load ( k )
考虑到电池组的辅助供能和应急功能,蓄电池组的最低SOC要能保证当发电机组故障时飞机具有紧急降落所需的足够能量E emergency ,表达如下
(19) SOC ( k ) E Bat,max > E emergency
(20) s . t . 0 ≤ P M ( k ) ≤ P M , max 0 ≤ P B ( k ) ≤ P B , max P G ( k ) + P B ( k ) > P Load ( k ) SOC ( k ) E Bat,max > E emergency
3.1.2 底层模型预测控制器模型
底层模型预测控制器用于混合动态电源主要是电池组的管理,电池组充放电时,两端的电压随着电池组SOC的变化而变化,所以对于双向DC/DC的控制是随着电池组能量变化而变化的,而决策主要是双向DC/DC变换器的占空比信号d B ∈(0,1),使电池组输出端的电压稳定在母线标准电压处,所以电池组的作用不仅是作为系统能量管理的一部分,还承担着在负载能量波动时维持母线电压的目的。底层的系统控制架构如图7 所示。
图7
如前所述,底层的MPC对功率变换器的动态特性关系极大,控制时域和预测时域都在毫秒级,下面的方程可以描述电池组的电感电流和电容电压是如何随负载变化而变化的。
(21) L d i B d t = u B d B − R B i B − u bus C d u C d t = i G + i B − i L
底层MPC给定控制时间T C 为毫秒级,设定T C =10 ms,采用欧拉前向离散方法将上式离散,表达式为
(22) i B ( k + 1 ) u C ( k + 1 ) = 1 + T C L R B − T C L T C C 1 i B ( k ) u C ( k ) + T C L u B ( k ) 0 d B ( k ) + 0 T C C ( i G ( k ) − i L ( k ) )
式中,L 是双向DC/DC变换器的滤波电感;C 是防止电压波动的汇流条直流电容。
给出的状态变量是电池组动态电流i B 和直流电容电压u C ,决策变量是双向DC/DC的占空比控制命令d B 。值得注意的是,控制矩阵中的电池组端电压u B (k )是随系统变化的变量,根据电池组的SOC估计得到或直接测量得到。
低层MPC的控制目标是考虑直流母线的电压稳定性,因此输出变量是k +1时刻的直流母线电压值u bus (k +1),表达式为
(23) u bus ( k + 1 ) = 0 − 1 i B ( k ) u C ( k ) + u B ( k + 1 ) d B ( k + 1 )
考虑到如前所述的母线电压调节和电池组电流跟随目标,定义两者在预测时域N P 内偏离标准值的偏离度为系统成本函数,即
(24) c 1 = ∑ k = 1 N P λ i [ i B ( k ) − i B,ref ( k ) ] 2 + λ v [ u bus ( k ) − u bus,ref ( k ) ] 2
式中,λ i 是电池组电流i B 的偏离系数;λ v 是母线电压u bus 的偏离系数;i bus 是电池组参考电流,由高阶MPC给出;u bus,ref 是母线参考电压,本架构设定的汇流条电压为270 V。
双向DC/DC占空比控制信号的开关频率也会造成系统负担,开关频率过高造成的开关损耗也是不可忽略的,所以考虑在控制周期N C 内控制命令的变化率也是系统成本的一部分,定义为
(25) c 2 = ∑ k = 1 N C ( λ db [ d B ( k + 1 ) − d B ( k ) ] 2 )
(26) min C = α 1 c 1 + α 2 c 2 = α 1 ∑ k = 1 N P ( λ i [ i B ( k ) − i B,ref ( k ) ] 2 + λ v [ u bus ( k ) − i bus,ref ( k ) ] 2 ) + α 2 ∑ k = 1 N c ( λ db [ d B ( k + 1 ) − d B ( k ) ] 2 )
控制变量d B (即用于双向DC/DC的占空比命令)被约束如下
(27) 0 < d B ( k ) < 1
为了确保电池不被过度充电或过量放电,另一个需要考虑的限制因素是来自电池组的电流i B ,因为它不包含在更高级别的MPC中。直流汇流条电压按照标准要求也不能有过高的变化范围,其约束条件如下
(28) i B,min < i B ( k ) < i B,max Δ u bus ( k ) < 2 % u bus
(29) s . t . 0 < d B ( k ) < 1 i B,min < i B ( k ) < i B,max Δ u bus ( k ) < 2 % u bus
3.2 基于规则的能量管理控制策略
为了验证混合电推进飞机电力系统分层MPC的控制效果,由于传统的飞机电力系统并不具有主动的能源管理控制策略,供配电系统能量分配按照峰值功率设计且基于负载优先级进行分配调度,多电飞机乃至电推进飞机需要采用基于任务的主动能量管理策略,实现系统功率的优化分配。现给出典型基于规则的能量控制方法的控制性能作为对比,基于确定规则的控制方法是能量管理策略中最简单直观的方式,即通过系统静态优化给出的混合能源电源系统优化分析结果,依据系统设计经验制定不同的任务功率区间所对应的电源系统的动作方式,以及电池组的充放电所满足的SOC限制,这些动作所对应的控制量都是简单的逻辑信号,现制定规则如下:① 单发电机运行状态:任务功率≤70 kW;② 双发电机运行状态:任务功率≤140 kW;③ 电池组放电状态:任务功率大于140 kW且SOC>0.2,最大放电功率为5C ;④ 电池组充电状态:任务功率小于140 kW且SOC<1,最大充电功率为2C ;⑤ 非关键任务负载状态:任务功率大于140 kW时切除。
发电机组的任务功率包含电池组的功率需求,发电机组的功率为负载功率的实时值。可以看出,这种能源配置方案能够满足基本的任务调度及负载管理需求,只能做到能源的及时匹配和利用,但显然其不具有在长时间飞行过程中,电力系统能量的优化调度分配能力。
4 电推进系统模型建立和仿真分析
4.1 建模解算过程
根据以上对于混合电推进飞机的动态能量模型预测控制律的设计,得到以下公式为
(30) min x ( k + 1 k ) , K x ( k + p + 1 k ) u ( k k ) , K u ( k + p k ) J = ∑ i = 1 P x ( k + 1 k ) − x ref ( k + i k ) − x ref ( k + i k ) T Q x ( k + 1 k ) + u T ( k + i k ) R u ( k + i k ) + Δ u T ( k + i k ) R d Δ u ( k + i k ) + x ( k + p + 1 k ) − x ref ( k + p + 1 k ) − x ref ( k + p + 1 k ) T Q f x ( k + p + 1 k )
式中,Δu (k +i |k )=u (k +i |k ) -u (k +i -1|k )为控制量跟踪误差,为了限制控制量变化过快,x (k +p +1|k ) - x ref (k +p +1|k )为状态量跟踪误差。
(31) u min ≤ u ( k + i | k ) ≤ u max
为了体现MPC控制的跟踪性能,定义MPC控制输出的均方根误差值(RMSE)为
(32) R M S E ( y ) = ( 1 N ∑ i = 0 N y i ∗ − y i 2 ) 1 2
式中,N 是整个周期的采样点数,y i ∗ i 个采样控制时刻的参考值,yi 是此时的信号采样值。类似于方差的定义,式(32)对各个采样时刻的控制误差进行了统计分析,得到控制性能的误差离散程度,其值越小,说明MPC控制器的性能越优越。
建立了混合电推进飞机的对象模型和预测模型,并对模型预测控制器中的输入状态变量和输出决策变量做了定义,同时给出了控制对象的优化目标和成本函数,针对混合电推进飞机的动态能量控制过程,控制算法的基本流程如图8 所示。
图8
顶层MPC控制器模块由于包含混合整数二次规划问题,因此采用MIQP工具箱进行建模求解。低层MPC控制器模块接收系统测量状态信号(mo)、参考信号(ref)和可选测量扰动信号(md)。通过使用默认KWIK求解器或自定义QP求解器求解二次规划问题来计算最优决策变量(mv)。
基于MPC控制器设计的混合电推进飞机仿真控制架构包含参考信号输入、对象模型、预测模型和分层MPC控制器这几个模块,MPC模型的参数设置和仿真控制由Matlab脚本文件控制。
4.2 仿真分析
将分布式电推进飞机整个飞行任务时长等效为3 600 s(1 h)。顶层MPC控制器的控制目标为设定发电机组和电池组的功率输出以达到负载侧的功率需求,因为系统能量的变化尺度是秒级,所以设定采样控制时长为1 s,通过仿真得到能量管理控制结果如图9a 所示;底层MPC的控制目标为维持母线电压的稳定,通过改变双向DC/DC变换器的占空比实现,这部分控制要尽可能精确,考虑MPC优化的计算过程,综合考虑设定采样控制时长为10 ms,仿真结果如图9c 所示。
图9
图9a 中,在整个任务剖面下,发电机组提供了主要的能量供给,在起飞爬升、巡航和任务阶段为双发电机共同供电,在下降和着陆阶段由单发电机供电,整个发电机组长期工作于较高的额定工作点,效率符合优化预期。电池组提供了峰值时的额外功率需求,并在负载功率需求不高时由发电机组进行充电补能,实现了能量调度,达到了“削峰填谷”的作用。从图9b 发电机组的运行情况来看,MPC控制器能够达到较好的预测效果,且在控制时域内的控制精度也较高。由图9b 中放大效果图可以看出,预测控制虽有滞后但总体跟踪效果较好,满足了系统控制要求,而且发电机组整体运行基本保持双发电机较高负荷状态,系统效率较基于峰值的功率设计有显著提高。
从图10 中的比例放大效果图来看,预测追踪效果良好,呈现阶梯状步长跟踪,整体满足电推进系统载荷能量需求。
图10
从图9b、9c 和图11 中的两种能量管理策略的性能对比来看,基于确定规则和基于MPC的能量管理方法都能够准确地跟踪负载任务的能量需求,满足混合电推进飞机的能源供给。但从其控制效果来看,基于确定规则的能量管理策略在维持发电机汇流条电压的能力上略显不足,汇流条电压的波动较大,在大功率脉冲或阶跃性负载冲击时电压超调达6.3%,严重影响电力系统的电能质量稳定性。在进行MPC控制管理时可预测到负载的能量波动,这时可以提前规划好系统的能量分配,由电池组充放电状态进行电流的补充和吸收,避免了汇流条电压的大范围波动,将电压超调降低到了不足2%。从放大效果图来看,预测跟踪调节效果良好,达到预期要求。且从系统的能效角度来看,基于确定规则的能量功率策略的效率不如MPC管理策略效果好,这是因为MPC控制器具有局部优化的功能,可显著提高系统效率达5.4%,降低了整个电力系统的能量消耗,使混合能源的需求降低了25 kJ/h,随着系统运行时间增加,这一优化效果体现愈加明显。
图11
通过两种能量管理策略的对比分析可以看出MPC控制具有显著的优势,下面对混合电推进飞机的整体性能进行具体分析。
图12a 和12b 分别显示了在MPC控制效果下的混合电推进飞机的剩余燃油量和电池组SOC的变化曲线,可以看出,燃油消耗平稳下降,说明燃油发动机的轴功率提取较为稳定。
图12
从图12b 电池组的SOC变化情况来看,电池组的容量完全满足系统的峰值能量需求。且从变化趋势来看,电池组的功率补充及时有效,放电速度较快,充电时平稳上升,功率也比较稳定。另外放电深度在20%以上,能够适应系统动态能量调节的需要。在巡航阶段电池组SOC保持在0.9,这是因为SOC较高时,端电压的变化率较大,带来的控制成本增大,因此MPC控制器选择在低于0.9的范围内对电池组进行充放电控制也是合理的。
图13 显示了系统整体效率即负载需求能量对燃油消耗能量的比值,这一效率仅为20%,这是由燃油热值转化率较低决定的。但系统电功率的效率即负载功率需求对电源系统的比值较高,整体电功率效率达到80%,这是因为发电机组的效率整体较高,约为93.5%,极大地降低了系统功率损耗。目前影响系统电功率效率的因素还是电池组,未来提高电池组的能量管理技术是发展的关键。
图13
下面对电推进系统电池组模块的运行情况进行描述,体现电推进系统能量调节的动态特性。包括电池组的占空比调节、端电压、功率变化情况,以及非关键性电子负载的切换状态和功率变化。如图14 、15 所示。
图14
图15
图14 所示为电池组的状态变化情况。图14a 中前半段电池组的占空比变化较频繁,这是因为母线电压处于较为频繁的波动状态,而电池组SOC水平较高,故呈现频繁开关状态,而后半段电池组处于长期工作状态,占空比仅随电池组端电压变化而变化,且电池组电压变化范围不大,所以占空比调节特性平缓。图14b 所示为电池组的功率运行情况,从放大效果图来看,MPC控制的功率特性能够很好地跟随参考值。
非关键电子负载功率一般较小,其根据不同的任务状况是变化的,从图15 的非关键电子负载的负载特性图来看,其长期处于工作状态,仅在峰值功率和电源系统功率需求不足期间停止使用,这也避免了非关键电子负载长期不工作导致的电推进飞机系统不稳定的情况。
下面对同步发电机、电池组模型的电压、电流特性进行分析,如图16 和图17 所示。
图16
图17
图16 为发电机G1电压电流输出特性曲线,发电机G2在下降阶段处于关闭状态,图中上方实线为电压电流有效值曲线,可以看出,发电机电压基本不变,电流输出也较稳定。图17 为蓄电池组输出电压电流特性曲线,电池组输出电压随着SOC水平的降低而下降,变化较平缓,但电流输出特性随负载波动变化较大,可见电池组对于电力系统能量波动的抑制作用较明显。
从图18 分析得到三个控制量的RMSE值分别为7.1%、6.4%、4.3%,从以上预测模型的跟踪效果和误差分析可以看出,分层MPC的控制效果良好,整体误差水平低于10%,达到了动态能量管理的理想预期,尤其是对于汇流条电压的扰动抑制效果更为明显,显著提高了汇流条的电能质量稳定性。
图18
从以上结果的对比分析和仿真效果来看,分层MPC控制策略对于混合分布电推进飞机动态能量管理具有极高的适应性和鲁棒性。主要体现在以下几个方面:① 电力系统能量满足负载需求,且利用率较高;② 电力系统能量分配合理,发电机组长期工作于额定工作点附近,显著降低了功率损耗;③ 电源系统输出功率稳定,负载波动对母线电压影响较小;④ 系统能量的动态调节特性良好,能够满足电推进飞机飞行各个任务阶段的能量需求,“削峰填谷”作用明显。
5 能量管理系统半物理试验验证
5.1 试验平台描述
为了验证混合电推进飞机分层模型预测控制算法的适应性,利用RT-LAB实时仿真平台构建混合电推进飞机系统架构,对分层模型预测控制架构的有效性进行进一步的分析验证。构建的混合电推进飞机供配电系统实时仿真平台(RT-LAB平台)总体架构如图19 所示。
图19
根据验证平台的总体架构,通过混合电推进飞机电力系统-半实物仿真的快速控制原型(RCP)将RT-LAB Opal5700作为控制器,典型硬件(ATRU/DC-DC等)采用功率在环的半物理仿真平台集成。并通过采集通道,采集电力系统中关键部件参数,便于分析处理。利用RT-LAB中的负载配置单元对程控电子负载进行控制模拟不同飞行任务条件下的电气负载功率需求状态,进行模拟控制分析。另外利用采样得到的状态变量数据对电推进系统电力系统架构和能量流动进行预测分析。
图20 给出了基于RT-LAB的实物图形。由发电机拖动台和发电机测试试验台组成航空同步发电机电源系统,配合电池组和功率变换器共同组成电推进飞机电力系统缩比模型,模拟负载包含机载设备和电推进电机负载,分别由交直流电子负载和多个小型驱动电机组成,控制系统为RT-LAB仿真平台(包含上位机软件)。构建缩比ATRU整流器以及DC/DC变换器、交直流负载来进行功率在环仿真试验,设定机载发电单元输出电压为115 V/400 Hz恒频交流电压,并利用模拟负载的功率设定模拟飞行剖面任务阶段,实现一个缩比的飞行剖面功率分布曲线。由RT-LAB输出控制信号至发电机控制单元和电池组,通过调节控制发电机拖动台的变频器和双向DC/DC变换器的控制信号调节混合电源系统的输出电流值,达到跟踪负载功率的目的。
图20
图20
基于RT-LAB的分布式飞机电推进系统试验平台
分布式电推进电力系统的MPC算法下载到RT-LAB实时仿真软件中,包括信号采样程序、数据处理程序等模块,在此基础上完成系统的分层MPC能量管理策略验证。
5.2 试验结果分析
电推进电力系统缩比验证模型被定义为1.5 kW的功率等级,仿真验证时长为360 s,预测时域步长p =10,控制时域步长m =2,顶层和底层MPC控制器的控制周期分别为1 s和0.01 s。通过仿真,得到的部分结果分别如图21 ~23 所示。
图21
图22
图23
交流发电机采样信号为输出115 V/400 Hz,输出状态良好。母线电压信号为270 V,基本保持稳定,没有出现大的信号波动。说明MPC控制器的调节特性良好,对于负载的不稳定性变化有较好的抑制作用。
图23b 为电池组的电流信号对比,图中有三组信号,分别为模拟负载电流需求设定值、MPC控制信号预测模型输出值和实际采样信号值(实线)。通过对比分析,发电机和锂电池的电流都能很好地追踪到给定的参考信号,验证了MPC能量控制方法的良好效果。
通过试验分析得到基于RT-LAB的MPC控制及Simulink平台下的MPC仿真结果对比,初步验证所提分层MPC能量管理控制策略对于分布式混合电推进飞机动态能量管理优化研究的可行性。
6 结论
本文针对分布式电推进飞机的动态能量管理技术的研究,将模型预测控制(MPC)算法用于混合电推进飞机,采用了分层能量管理控制器的方法。即顶层MPC控制着混合电推进飞机系统的飞行过程能量优化分配,底层MPC则管理电池组的充放电状态和维持直流母线的电压平衡,利用储能装置的“削峰填谷”,改善系统工作点,达到对混合电推进飞机动态能量管理的目的。将分层MPC能量管理策略与基于规则的策略进行了对比分析,最后通过基于RT-LAB的电推进飞机动力系统硬件在环半实物仿真平台,对混合电推进飞机的分层MPC算法进行了技术验证,试验表明其对于混合电推进飞机的动态能量管理具有很强的鲁棒性和操作性,验证了理论分析的正确性。
本文研究工作为分布式混合电推进飞机系统能量优化管理策略研究的早期阶段提供一种参考研究路径,对于不同飞行任务剖面,例如基于负载随机变化的MPC算法研究和更多子系统下多时间尺度、复杂度和约束问题下的分布式优化算法还需要进一步研究,基于实时优化策略的能够满足飞机电力系统不确定性的自适应动态规划能量管理技术是未来的研究方向。
参考文献
View Option
[1]
ANSELL P J HARAN K S Electrified airplanes a path to zero-emission air travel
[J]. IEEE Electrification Magazine , 2020 , 8 (2 ):18 -26 .
[本文引用: 1]
[2]
KRATZ J L CULLEY D E THOMAS G L A control strategy for turbine electrified energy management
[C]// AIAA Propulsion and Energy 2019 Forum , 2019 :1 -19 .
[本文引用: 1]
[3]
孔祥浩 , 张卓然 , 陆嘉伟 , 等 . 分布式电推进飞机电力系统研究综述
[J]. 航空学报 , 2018 , 39 (1 ):51 -67 .
[本文引用: 2]
KONG Xianghao ZHANG Zhuoran LU Jiawei et al. Review of electric power system of distributed electric propulsion aircraft
[J]. Acta Aeronautica et Astronautica Sinica , 2018 , 39 (1 ):51 -67 .
[本文引用: 2]
[4]
BUTICCHI G BOZHKO S LISERRE M et al. On-board microgrids for the more electric aircraft-technology review
[J]. IEEE Transactions on Industrial Electronics , 2019 , 66 (7 ):5588 -5599 .
DOI:10.1109/TIE.41
URL
[本文引用: 1]
[5]
UEBEL S MURGOVSKI N TEMPELHAHN C et al. Optimal energy management and velocity control of hybrid electric vehicles
[J]. IEEE Transactions on Vehicular Technology , 2018 , 67 (1 ):327 -337 .
DOI:10.1109/TVT.2017.2727680
URL
[本文引用: 1]
[6]
张晗 , 杨继斌 , 张继业 , 等 . 基于多种群萤火虫算法的车载燃料电池直流微电网能量管理优化
[J]. 中国电机工程学报 , 2021 , 41 (3 ):833 -846 .
[本文引用: 1]
ZHANG Han YANG Jibin ZHANG Jiye et al. Multiple-population firefly algorithm-based energy management strategy for vehicle-mounted fuel cell DC microgrid
[J]. Proceedings of the CSEE , 2021 , 41 (3 ):833 -846 .
[本文引用: 1]
[7]
刘俊峰 , 陈剑龙 , 王晓生 , 等 . 基于深度强化学习的微能源网能量管理与优化策略研究
[J]. 电网技术 , 2020 , 44 (10 ):3794 -3803 .
[本文引用: 1]
LIU Junfeng CHEN Jianlong WANG Xiaosheng et al. Energy management and optimization of multi-energy grid based on deep reinforcement learning
[J]. Power System Technology , 2020 , 44 (10 ):3794 -3803 .
[本文引用: 1]
[8]
MAHMOUD M S Microgrid advanced control methods and renewable energy system integration
[M]. Oxford:Butterworth-Heinemann , 2017 .
[本文引用: 1]
[9]
CHOL J S Energy management agent frameworks scalable, flexible, and efficient architectures for 5G vertical industries
[J]. IEEE Industry Electronics Magazine , 2021 , 15 (1 ):62 -73 .
[本文引用: 1]
[10]
BISWAS A EMADI A Energy management systems for electrified powertrains:State-of-the-art review and future trends
[J]. IEEE Transactions on Vehicular Technology , 2019 , 68 (17 ):6453 -6467 .
DOI:10.1109/TVT.25
URL
[本文引用: 1]
[11]
张萌亮 , 黄震宙 , 沈浩 , 等 . 支持电动汽车灵活充电的微电网能量管理策略
[J]. 电气自动化 , 2020 , 42 (5 ):5 -8 .
[本文引用: 1]
ZHANG Mengliang HUANG Zhenzhou SHEN Hao et al. Micro-grid energy management strategy supporting flexible charging for electric vehicles
[J]. Electrical Automation , 2020 , 42 (5 ):5 -8 .
[本文引用: 1]
[12]
ADRIANA C L NELSON L D MOISES G et al. Mixed-integer linear programming-based energy management system for hybrid PV-wind-battery micro-grids:Modeling,design,and experimental verification
[J]. IEEE Transactions on Power Electronics , 2017 , 32 (4 ):2769 -2783 .
DOI:10.1109/TPEL.2016.2581021
URL
[本文引用: 1]
[13]
BELLACHE K CAMARA M B DAKYO B Transient power control for diesel-generator assistance in electric boat applications using supercapacitors and batteries
[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics , 2018 , 6 (1 ):416 -428 .
DOI:10.1109/JESTPE.2017.2737828
URL
[本文引用: 1]
[14]
SCHLEY W Electric versus hydraulic flight controls:Assessing power consumption and waste heat using stochastic system methods
[J]. SAE International Journal of Aerospace , 2017 , 10 (1 ):32 -45 .
DOI:10.4271/2017-01-2036
URL
[本文引用: 1]
[15]
ROBYNS B SAUDEMONT C HISSEL D et al. Electrical energy storage in transportation systems [M]. ISTE Ltd. and John Wiley & Sons Inc. 2016 .
[本文引用: 1]
[16]
KARANAYIL B CIOBOTARU M AGELIDIS V G Power flow management of isolated multiport converter for more electric aircraft
[J]. IEEE Transactions on Power Electronics , 2017 , 32 (7 ):5850 -5861 .
DOI:10.1109/TPEL.2016.2614019
URL
[本文引用: 1]
[17]
KOEIN J PANGBORN H C WILLIAMS M A et al. Hierarchical control of aircraft electro-thermal systems
[J]. IEEE Transactions on Control Systems Technology , 2020 , 28 (4 ):1218 -1232 .
DOI:10.1109/TCST.87
URL
[本文引用: 1]
[18]
GAO F BOZHKO S ASHER G et al. An improved voltage compensation approach in a droop-controlled DC power system for the more electric aircraft
[J]. IEEE Transactions on Power Electronics , 2016 , 31 (10 ):7369 -7383 .
[本文引用: 1]
[19]
TAWICK D MILIOS K GLADIN J C et al. A method for determining optimal power management schedules for hybrid electric airplanes
[C]// 2019 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS) , 2019 :1 -21 .
[本文引用: 1]
[20]
SLIWINSKI J GARDI A MARINO M et al. Hybrid-electric propulsion integration in unmanned aircraft
[J]. Journal of Energy , 2017 , 140 (2 ):1407 -1416 .
[本文引用: 1]
[21]
RECALDE A A ATKIN J A BOZHKO S V Optimal design and synthesis of MEA power system architectures considering reliability specifications
[J]. IEEE Transactions on Transportation Electrification , 2020 , 6 (4 ):1801 -1818 .
DOI:10.1109/TTE.6687316
URL
[本文引用: 1]
[22]
HERRERA L TSAO B Analysis and control of energy storage in aircraft power systems with pulsed power loads
[J]. SAE International Journal of Aerospace , 2016 , 9 (1 ):8 -13 .
DOI:10.4271/2016-01-1981
URL
[本文引用: 1]
[23]
SPAGNOLO C MADONNA V SUMSUROOAH S et al. Optimized low voltage loads allocation for MEA electrical power systems
[C]// 2019 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS) , 2019 :1 -8 .
[本文引用: 1]
[24]
FANG S XU Y Multiobjective coordinated scheduling of energy and flight for hybrid electric unmanned aircraft microgrids
[J]. IEEE Transactions on Industrial Electronics , 2018 , 66 (7 ):5686 -5695 .
DOI:10.1109/TIE.2018.2860569
URL
[本文引用: 1]
[25]
RECALDE A LUKIC M HEBALA A et al. Energy storage system selection for optimal fuel consumption of aircraft hybrid electric taxiing system
[J]. IEEE Transactions on Transportation Electrification , 2021 , 7 (3 ):1870 -1887 .
DOI:10.1109/TTE.2020.3039759
URL
[本文引用: 1]
[26]
YAMASHITA D Y VECHIU L GAUBERT J P Two-level hierarchical model predictive control with an optimised cost function for energy management in building microgrids
[J]. Applied Energy , 2021 , 285 (34 ):116420 .
DOI:10.1016/j.apenergy.2020.116420
URL
[本文引用: 1]
[27]
陈路明 , 廖自力 , 马晓军 , 等 . 基于分层控制的混合动力车辆实时能量管理策略
[J]. 兵工学报 , 2021 , 42 (8 ):1580 -1591 .
[本文引用: 1]
CHEN Luming LIAO Zili MA Xiaojun et al. Hierarchical control-based real-time energy management strategy for hybrid electric vehicles
[J]. Acta Armamentarii , 2021 , 42 (8 ):1580 -1591 .
DOI:10.3969/j.issn.1000-1093.2021.08.002
[本文引用: 1]
A real-time energy management strategy based on hierarchical control is proposed for the coordinated control of multiple power sources and low fuel economy of hybrid electric vehicles (HEVs). The mathematical models of different power sources are established by analyzing the topology of whole vehicle and the component characteristics of hybrid electric system. The wavelet filter layer is used to divide the full load power into high and low parts, and the high-frequency power is allocated to power-type power sources such as supercapacitors. The low-frequency power is used as the reference input of the model predictive control (MPC) layer. The fuel economy, power battery state of charge (SOC), and DC bus voltage are the optimization items to obtain the optimal control instructions of energy-type power sources such as diesel engine-generator sets and power battery packs. Some representative simulation experiments were performed on dSPACE and RTLAB hardware-in-loop (HIL) simulation platform to verify the effectiveness of the proposed energy management strategy. The results show that, under the condition of CUEDC cycle driving, the fuel economy of the proposed hierarchical energy management strategy is increased by 13.05% compared with the energy management strategy based on fuzzy rules, and the fuel economy is improved by 5.79% compared with the energy management strategy based on a single MPC. Besides, the target power of each energy-type power source under the hierarchical energy management strategy changes more gently, while the power-type power source is involved in the power adjustment process more frequently, which proves the effectiveness of the proposed energy management strategy in improving fuel economy and exerting power source characteristics.
[28]
JIANG Z H RAZIEI S A Hierarchical model predictive control for real-time energy-optimized operation of aerospace systems
[C]// 2019 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS) , 2019 :1 -16 .
[本文引用: 1]
[29]
WANG Y XU F MAO S W et al. Adaptive online power management for more electric aircraft with hybrid energy storage systems
[J]. IEEE Transactions on Transportation Electrification , 2020 , 6 (4 ):1780 -1790 .
DOI:10.1109/TTE.6687316
URL
[本文引用: 1]
[30]
VURAL B BOYNUEGRI A R NAKIR I et al. Fuel cell and ultra-capacitor hybridization:A prototype test bench based analysis of different energy management strategies for vehicular applications
[J]. International Journal of Hydrogen Energy , 2010 , 35 (20 ):11161 -11171 .
DOI:10.1016/j.ijhydene.2010.07.063
URL
[本文引用: 1]
[31]
ERDINC O VURAL B UZUNOGLU M A wavelet-fuzzy logic based energy management strategy for a fuel cell/battery/ultra-capacitor hybrid vehicular power system
[J]. Journal of Power Sources , 2009 , 194 (1 ):369 -380 .
DOI:10.1016/j.jpowsour.2009.04.072
URL
[本文引用: 1]
[32]
TAN J WANG L Enabling reliability-differentiated service in residential distribution networks with PHEVs:A hierarchical game approach
[J]. IEEE Transactions on Smart Grid , 2016 , 7 (2 ):684 -694 .
DOI:10.1109/TSG.2015.2420111
URL
[本文引用: 1]
[33]
JIANG Z H GAO L J DOUGAL R A Adaptive control strategy for active power sharing in hybrid fuel cell/battery power sources
[J]. IEEE Transactions on Energy Conversion , 2007 , 22 (2 ):507 -515 .
DOI:10.1109/TEC.2005.853747
URL
[本文引用: 1]
[34]
AMJADI Z WILLIAMSON S Power-electronics-based solutions for plug-in hybrid electric vehicle energy storage and management systems
[J]. IEEE Transactions on Industrial Electronics , 2010 , 57 (2 ):608 -616 .
DOI:10.1109/TIE.2009.2032195
URL
[本文引用: 1]
[35]
代伟 , 陆文捷 , 付俊 . 工业过程多速率分层运行优化控制
[J]. 自动化学报 , 2019 , 45 (10 ):1946 -1956 .
[本文引用: 1]
LU Wenjie FU Jun Multi-rate layered optimal operational control of industrial processes
[J]. Acta Automatica Sinica , 2019 , 45 (10 ):1946 -1956 .
[本文引用: 1]
Electrified airplanes a path to zero-emission air travel
1
2020
... 传统飞机发动机产生的能量主要用于飞机飞行推力、航空电子设备供电等目的,近年来,由于全球环境保护和绿色航空的要求,飞机机载设备用电功率需求快速增加带来了多电化和全电化需求.继飞机二次能源逐步统一为电能形式,从而形成多/全电飞机之后,未来电推进技术成为飞机动力系统电气化的重要发展方向[1 ] .与传统发动机推进系统相比,分布式电推进系统具有更高的效率和功率重量比.在实现飞机电推进技术全电化之前,目前由于电池等储能装置有限的能量密度,涡轮电推进技术是一个可行方案.因此,利用飞机发动机和推进电机之间的协同作用来改善飞机整体飞行性能的混合分布式电推进系统被提出[2 ] ,有望进一步简化飞机能源动力系统结构,提高飞机动力系统能量转换效率,降低燃油消耗和排放,该技术代表了航空电气化的高级发展阶段. ...
A control strategy for turbine electrified energy management
1
2019
... 传统飞机发动机产生的能量主要用于飞机飞行推力、航空电子设备供电等目的,近年来,由于全球环境保护和绿色航空的要求,飞机机载设备用电功率需求快速增加带来了多电化和全电化需求.继飞机二次能源逐步统一为电能形式,从而形成多/全电飞机之后,未来电推进技术成为飞机动力系统电气化的重要发展方向[1 ] .与传统发动机推进系统相比,分布式电推进系统具有更高的效率和功率重量比.在实现飞机电推进技术全电化之前,目前由于电池等储能装置有限的能量密度,涡轮电推进技术是一个可行方案.因此,利用飞机发动机和推进电机之间的协同作用来改善飞机整体飞行性能的混合分布式电推进系统被提出[2 ] ,有望进一步简化飞机能源动力系统结构,提高飞机动力系统能量转换效率,降低燃油消耗和排放,该技术代表了航空电气化的高级发展阶段. ...
分布式电推进飞机电力系统研究综述
2
2018
... 通常来说,分布式飞机电推进系统具有以下优点[3 ] :① 分布式电驱动的动力总成系统的体积更小、质量更轻,而且结构非常简单,有的系统甚至仅需要一个活动部件,而传统的活塞、涡轮发动机则复杂很多,至少需要冷却系统、电气系统、液压系统以及燃油系统等不同子系统配置;② 采用分布式电推进系统可以降低飞机动力系统的复杂度,从而减少维修保养的需求和成本;③ 分布式电驱动的动力总成系统能效基本可以达到90%~95%,而传统内燃机动力系统的能效在30%~40%,差距大约为3倍;④ 分布式电驱动动力系统在运行时比内燃机驱动动力系统噪声要小得多,可满足多种任务需求. ...
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Review of electric power system of distributed electric propulsion aircraft
2
2018
... 通常来说,分布式飞机电推进系统具有以下优点[3 ] :① 分布式电驱动的动力总成系统的体积更小、质量更轻,而且结构非常简单,有的系统甚至仅需要一个活动部件,而传统的活塞、涡轮发动机则复杂很多,至少需要冷却系统、电气系统、液压系统以及燃油系统等不同子系统配置;② 采用分布式电推进系统可以降低飞机动力系统的复杂度,从而减少维修保养的需求和成本;③ 分布式电驱动的动力总成系统能效基本可以达到90%~95%,而传统内燃机动力系统的能效在30%~40%,差距大约为3倍;④ 分布式电驱动动力系统在运行时比内燃机驱动动力系统噪声要小得多,可满足多种任务需求. ...
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
On-board microgrids for the more electric aircraft-technology review
1
2019
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Optimal energy management and velocity control of hybrid electric vehicles
1
2018
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
基于多种群萤火虫算法的车载燃料电池直流微电网能量管理优化
1
2021
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Multiple-population firefly algorithm-based energy management strategy for vehicle-mounted fuel cell DC microgrid
1
2021
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
基于深度强化学习的微能源网能量管理与优化策略研究
1
2020
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Energy management and optimization of multi-energy grid based on deep reinforcement learning
1
2020
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Microgrid advanced control methods and renewable energy system integration
1
2017
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Energy management agent frameworks scalable, flexible, and efficient architectures for 5G vertical industries
1
2021
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Energy management systems for electrified powertrains:State-of-the-art review and future trends
1
2019
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
支持电动汽车灵活充电的微电网能量管理策略
1
2020
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Micro-grid energy management strategy supporting flexible charging for electric vehicles
1
2020
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Mixed-integer linear programming-based energy management system for hybrid PV-wind-battery micro-grids:Modeling,design,and experimental verification
1
2017
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Transient power control for diesel-generator assistance in electric boat applications using supercapacitors and batteries
1
2018
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Electric versus hydraulic flight controls:Assessing power consumption and waste heat using stochastic system methods
1
2017
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
1
2016
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Power flow management of isolated multiport converter for more electric aircraft
1
2017
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Hierarchical control of aircraft electro-thermal systems
1
2020
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
An improved voltage compensation approach in a droop-controlled DC power system for the more electric aircraft
1
2016
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
A method for determining optimal power management schedules for hybrid electric airplanes
1
2019
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Hybrid-electric propulsion integration in unmanned aircraft
1
2017
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Optimal design and synthesis of MEA power system architectures considering reliability specifications
1
2020
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Analysis and control of energy storage in aircraft power systems with pulsed power loads
1
2016
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Optimized low voltage loads allocation for MEA electrical power systems
1
2019
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Multiobjective coordinated scheduling of energy and flight for hybrid electric unmanned aircraft microgrids
1
2018
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Energy storage system selection for optimal fuel consumption of aircraft hybrid electric taxiing system
1
2021
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Two-level hierarchical model predictive control with an optimised cost function for energy management in building microgrids
1
2021
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
基于分层控制的混合动力车辆实时能量管理策略
1
2021
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Hierarchical control-based real-time energy management strategy for hybrid electric vehicles
1
2021
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Hierarchical model predictive control for real-time energy-optimized operation of aerospace systems
1
2019
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Adaptive online power management for more electric aircraft with hybrid energy storage systems
1
2020
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Fuel cell and ultra-capacitor hybridization:A prototype test bench based analysis of different energy management strategies for vehicular applications
1
2010
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
A wavelet-fuzzy logic based energy management strategy for a fuel cell/battery/ultra-capacitor hybrid vehicular power system
1
2009
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Enabling reliability-differentiated service in residential distribution networks with PHEVs:A hierarchical game approach
1
2016
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Adaptive control strategy for active power sharing in hybrid fuel cell/battery power sources
1
2007
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
Power-electronics-based solutions for plug-in hybrid electric vehicle energy storage and management systems
1
2010
... 飞机分布式电推进电力系统也可以看成“飞行的微电网”[3 ] .基于传统的飞机电力系统,推进功率占全机动力系统总功率的95%以上,二次能源(电力、液压、气动)系统仅占飞机动力系统总功率的5%,而电推进飞机特别是分布式全电推进飞机,电力系统需要为推进功率产生的电能至少占到全机动力系统总功率的90%以上[4 ] ,因此需要对分布式电推进飞机电力系统进行能量管理,以优化推进系统发电机和电池组的能量分配,提升系统的功率效率,实现燃油消耗量最优的目标.现阶段对于飞机电推进系统来说,电力系统能量管理技术是确保混合电推进飞机在飞行过程中能量优化分配,并满足推进功率需求的关键技术,而电力系统的能量优化管理策略问题一直以来是众多学者的研究重点.从地面微电网[5 -6 ] 及可再生能源分布式发电系统[7 ] 到电动汽车[8 ⇓ ⇓ -11 ] ,电动船舶[12 ] 动力系统等都开展了相关研究.飞机混合电推进电力系统的负载既有飞行推进负载,还包含有任务负载、飞行控制做动负载,时间变化尺度较大[13 -14 ] .飞机电源系统惯性较低,电源容量相较于负载功率需求裕度不大,另外由于分布式电推进飞机的特殊性,对于系统的重量、体积、散热、可靠性和安全性有着更为苛刻的要求.因此针对分布式电推进飞机这种“飞行微电网”来说,其能量管理策略研究就更加复杂.飞机电气系统能量优化管理策略从方法上主要分为基于规则和基于优化两种手段,从时间尺度可以分为能量优化管理和功率控制分配.文献[15 ]对于飞机混合储能系统的功率控制进行研究,并提出了一种基于PI控制的多端口DC/DC变换器的控制方式来控制蓄电池和超级电容等储能元件的充放电,该变换器可实现燃料电池和光伏等新能源的接入功率控制,适合小型电推进飞机的驱动要求;文献[16 -17 ]采用了下垂控制方法和自适应李雅普诺夫函数优化法来实现飞机蓄电池和发电机之间的功率分配,但只是考虑了系统动态功率响应,没有从总体能量优化目标进行优化;文献[18 ⇓ ⇓ -21 ]主要针对多电飞机或混合电推进无人机开展了基于解析能量优化技术的研究,采用了动态规划或非线性凸优化方法离线计算能量优化策略,这些方法在飞行包线负载发生快速变化时效果较差,且不具备实时动态功率调节功能.文献[22 ]针对飞机脉冲性瞬时负载的影响进行分析,给出了基于模型预测的功率控制策略,并没有考虑能量优化目标.文献[23 ]基于油电混合推进的无人机,考虑到飞行参数的飞推耦合约束条件的影响,开展了基于推进系统有害气体排放最小的优化目标管理策略研究,采用两级优化Bender解耦算法,实现了无人机飞行全包线的能量优化,这种方法计算求解较为复杂,不适合实时解算.文献[24 ]基于多电飞机的绿色电气滑行技术,以燃油消耗率最小为目标开展了储能装置优化配置研究,并没有研究功率动态控制技术.文献[25 ]基于混合电推进飞机研究了基于巡航阶段的能量优化管理策略,为了实现直接运营成本最优,将电池充放电成本和对总体飞行成本的影响考虑在内,利用庞特里亚金最小值原理的最优控制理论,实现了飞机在特定飞行阶段的推力控制的速度最优化分配,但是没有考虑瞬时功率控制问题.在分层模型预测控制方面,相关学者分别针对飞机能源系统、船舶微网、车辆动力系统、工厂过程系统、建筑物综合微网系统开展了分布式或分层模型预测控制技术研究,以发电成本最小作为控制目标,实现不同层级的能量优化目标.文献[26 ]针对飞机电气系统和燃油热管理系统,采用了分级模型预测控制实现了多时间尺度的最优控制,分别利用混合整形规划(Mixed integer quadratic programing,MIQP)和二次型规划(Quadralic programming,QP)实现了系统级和子系统级电功率和热耗散的能量损耗优化.文献[27 ⇓ -29 ]以飞机一台发电机、电池和燃料电池混合储能系统为对象,电气系统发电成本和能量转换损耗最小为优化目标,其等效为二次规划问题(QP),采用分层模型预测控制技术,实现底层电流跟踪负载响应和汇流条电压稳定调节,但是负载工况变化考虑得较为简单,仅包含一个典型工况和小范围扰动的动态工况,没有考虑到负载侧和发电机组的投切控制.除上述策略以外,还有许多其他自适应或功率解耦算法被应用到混合动力系统能量管理中去.基于频率解耦(Frequency decoupling,FD)是另一种常见的能量管理策略,文献[30 -31 ]提出了基于小波-模糊的混合能量管理策略,小波变化使燃料电池、锂电池和超级电容组合分辨出相应低频、中频和高频的功率变化,有效提升了整个电池系统的使用寿命,而模糊逻辑策略则保证了电推进动力系统的燃料经济性和鲁棒性.此外,博弈论(Game theory, GT)[32 ] 、自适应控制(Adaptive control,AC)[33 ] 、经典PI控制[34 ] 等控制算法也被用于能量管理问题中.通过分析,以上现有研究成果大多是假定飞机电气负载相对固定情况的能量管理控制方法研究,并没有考虑到较大的电气负载动态变化时对电网的冲击影响,缺少考虑针对不同负载动态加卸载时的实时动态能量管理方法研究,也没有综合考虑分布式电推进飞机架构下总体能量优化目标,如燃油消耗代偿损失最小的实现. ...
工业过程多速率分层运行优化控制
1
2019
... 模型预测控制(Model predictive control,MPC)是一种超前反馈滚动优化控制策略,该控制策略能够根据当前已有的信息对系统的未来动态进行预测[35 ] .在每个采样周期内,MPC 都要求解一个有限时域开环最优问题,该问题的解就是系统的最优控制序列,得到控制序列后,在下一采样时刻将序列中的第一个元素作用于系统,同时滚动更新被控系统信息,在新一周期重复上面的过程,MPC控制器基本原理框图如图4 所示.MPC能够处理多输入多输出以及存在约束的系统. ...
Multi-rate layered optimal operational control of industrial processes
1
2019
... 模型预测控制(Model predictive control,MPC)是一种超前反馈滚动优化控制策略,该控制策略能够根据当前已有的信息对系统的未来动态进行预测[35 ] .在每个采样周期内,MPC 都要求解一个有限时域开环最优问题,该问题的解就是系统的最优控制序列,得到控制序列后,在下一采样时刻将序列中的第一个元素作用于系统,同时滚动更新被控系统信息,在新一周期重复上面的过程,MPC控制器基本原理框图如图4 所示.MPC能够处理多输入多输出以及存在约束的系统. ...


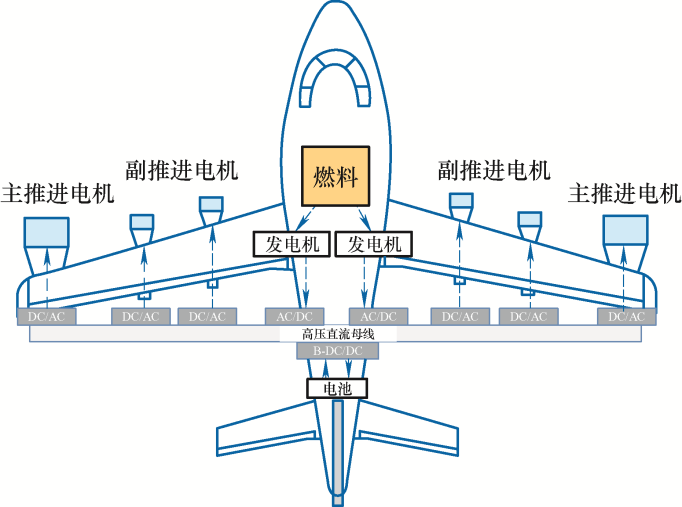
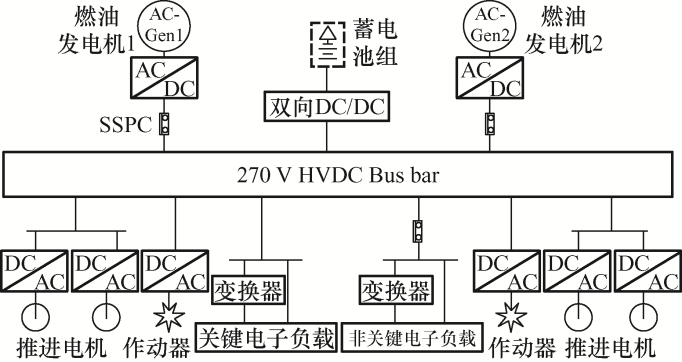
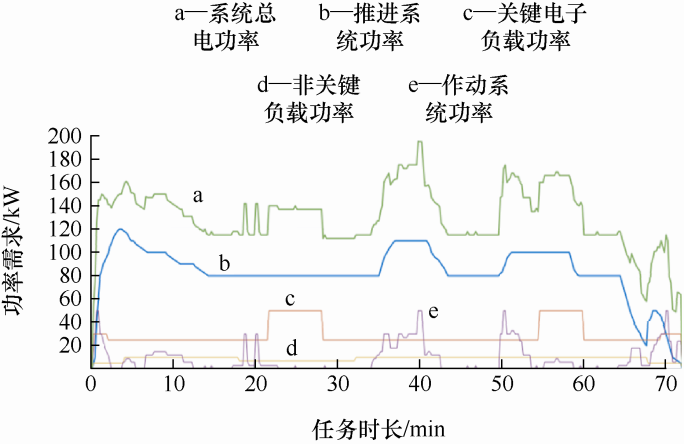
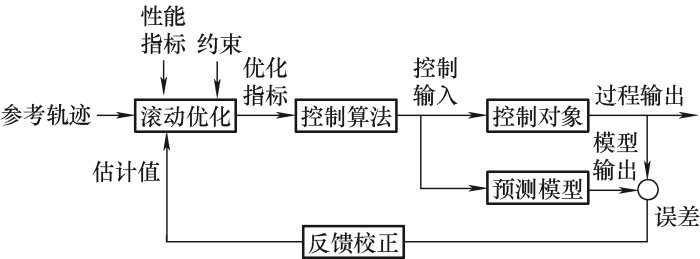
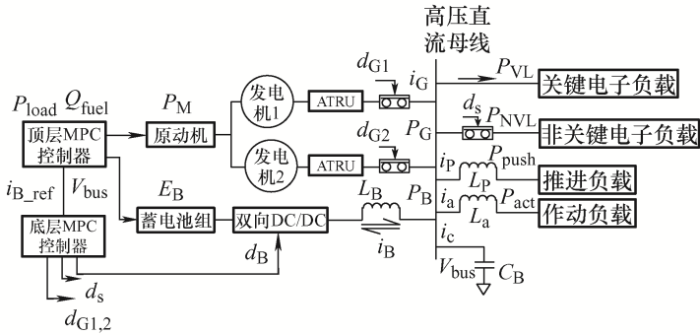
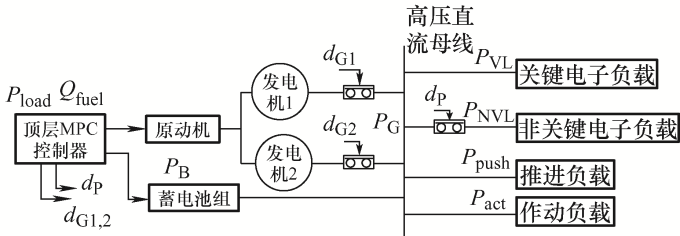
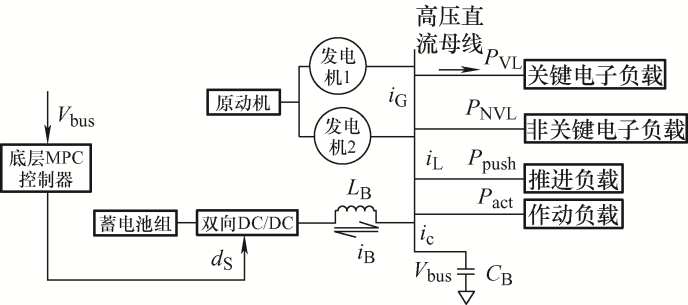
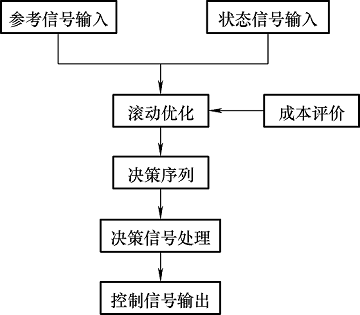
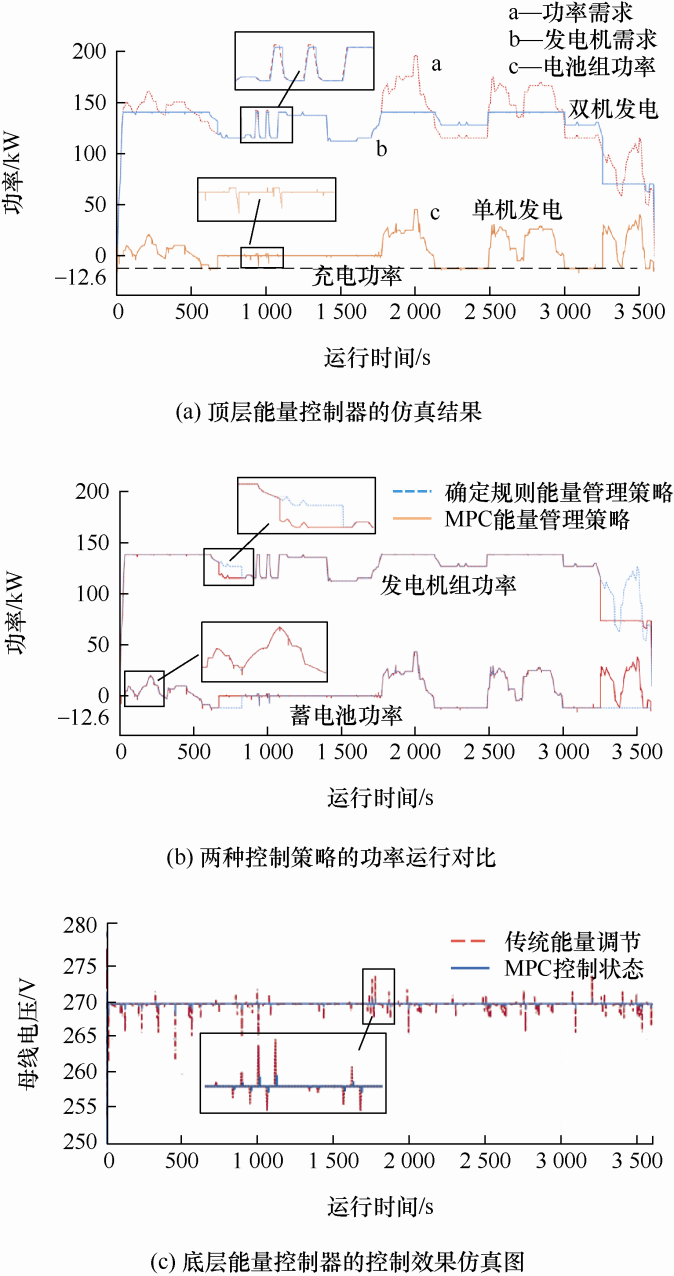
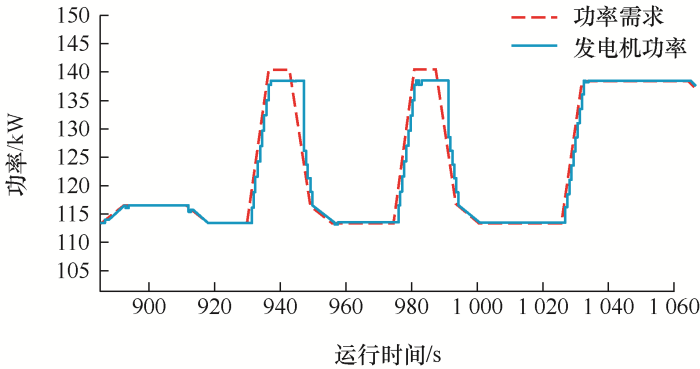
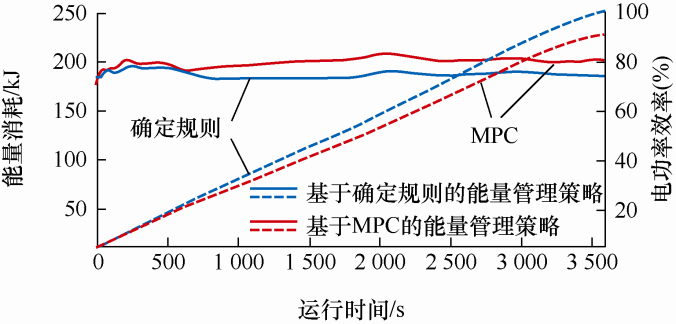
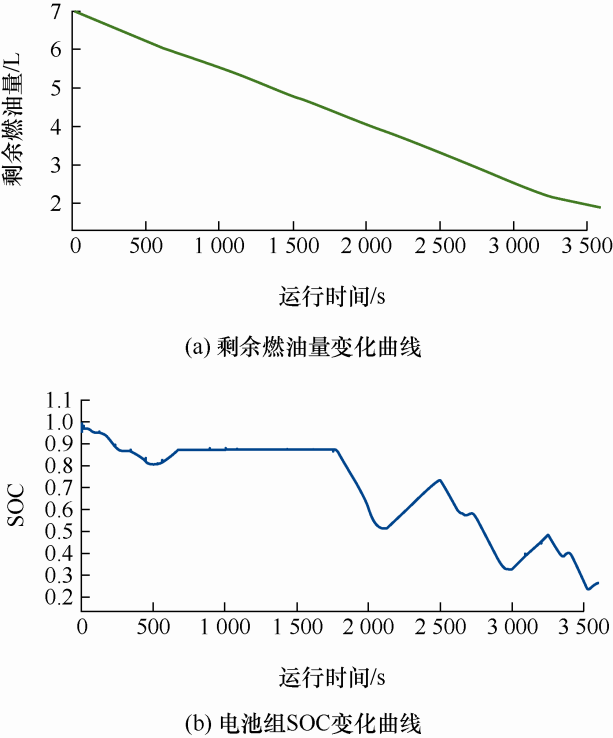
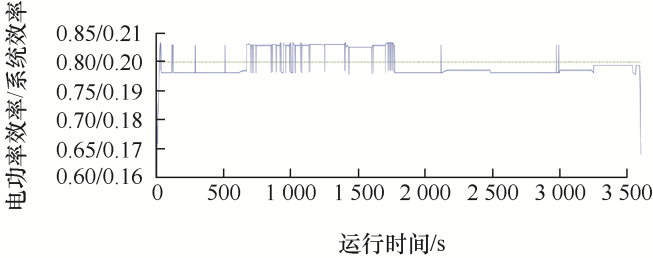
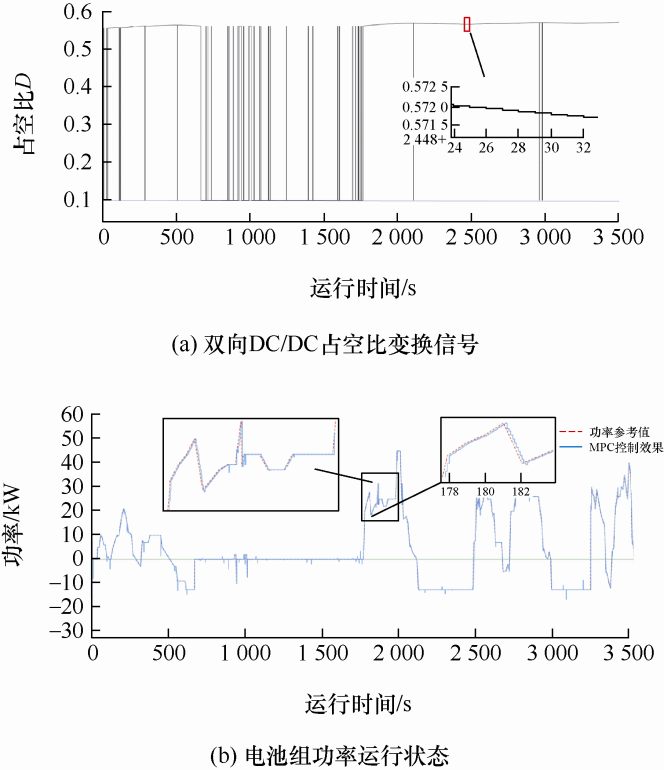
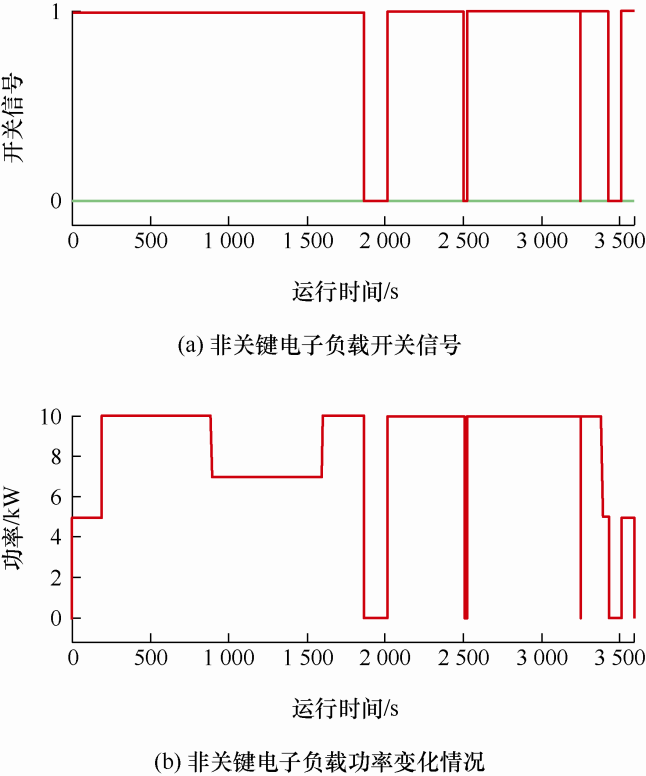
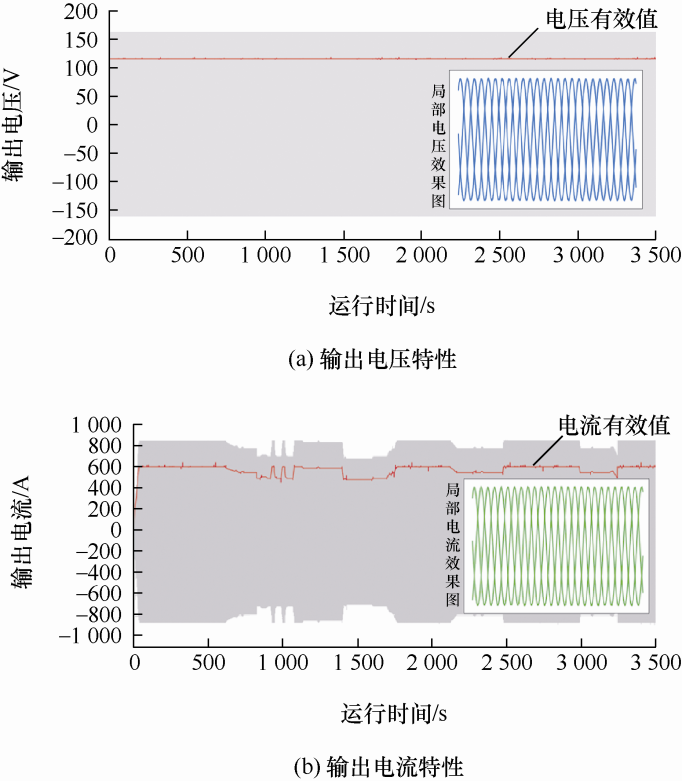
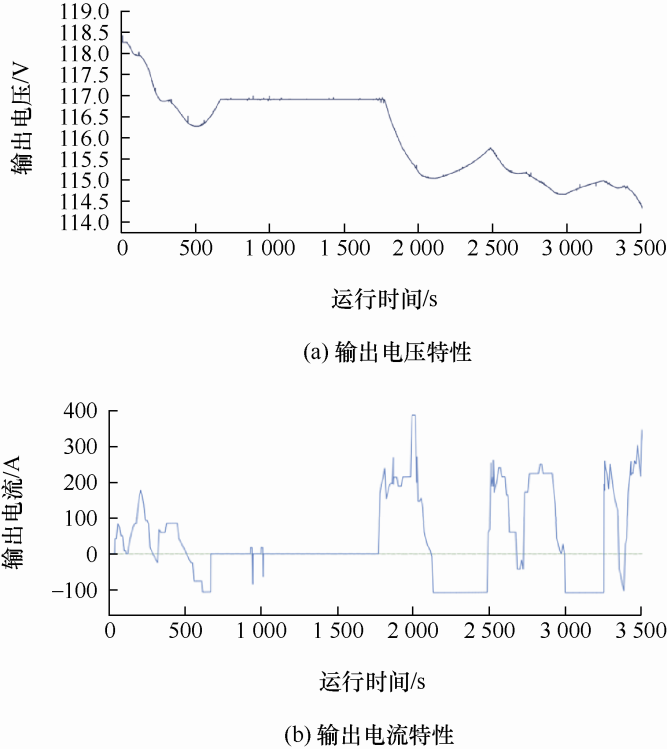
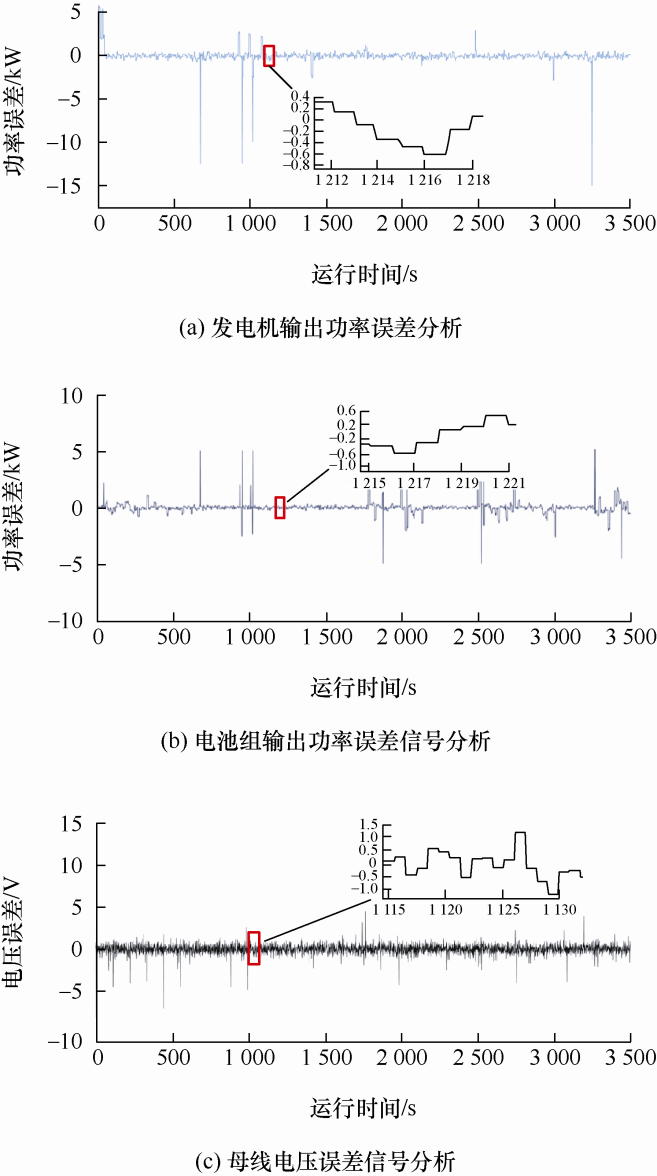
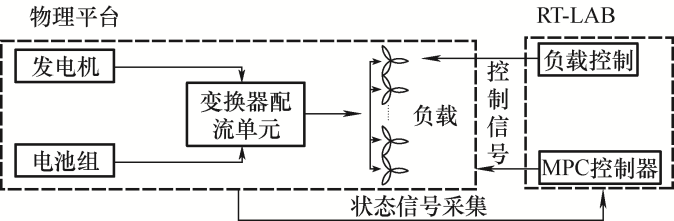
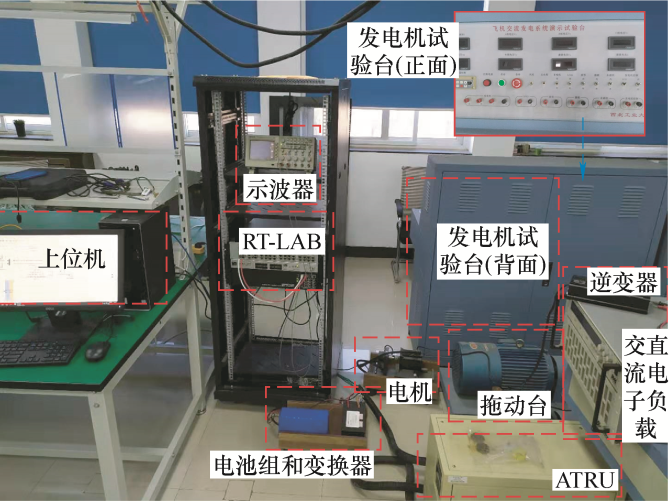
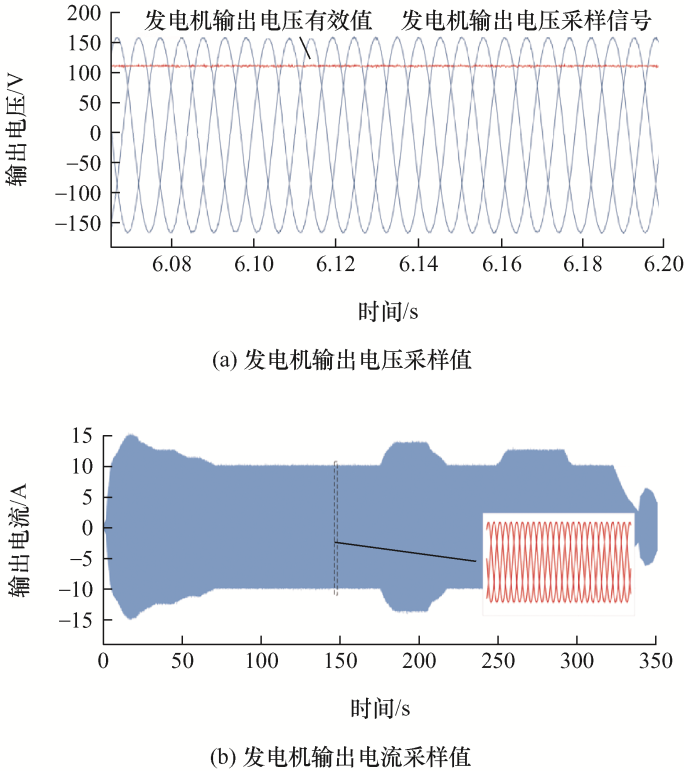
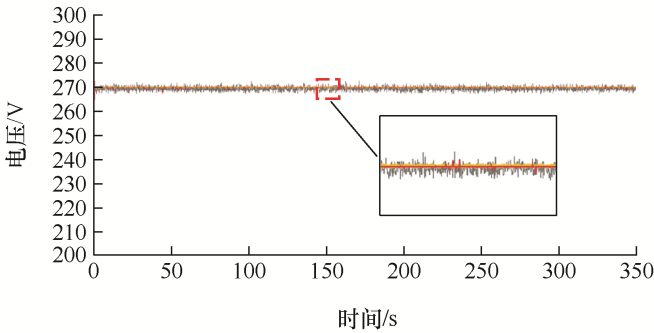
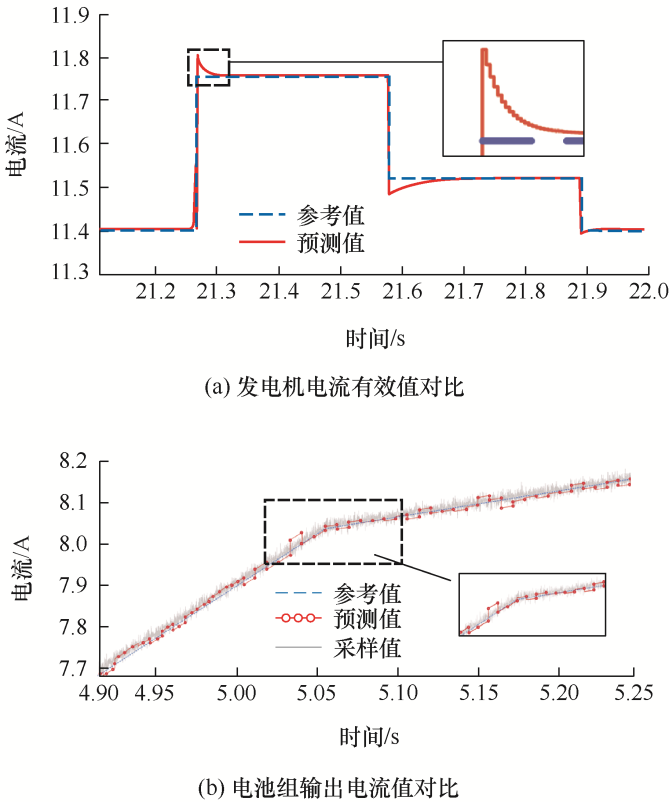


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}