1 引言
永磁同步电机(Permanent magnet synchronous motor, PMSM)因功率因数高、结构简单、可靠性好等优点,在汽车驱动领域、办公自动化设备以及高精度加工等方面获得了广泛应用。传统直接转矩控制通过滞环控制器和逆变器完成转矩控制,但逆变器的开关频率不高以及滞环控制的不精确性会导致转矩的脉动[1 ⇓ -3 ] ,这使得永磁同步电机的应用受到了较大限制,因此,转矩脉动的抑制成为了倍受关注的问题。
目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等。PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高。为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制。例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差。针对以上问题,有学者提出了滑模控制策略。滑模控制可在两个方面减小转矩脉动。一方面是通过构造滑模控制器来减小转矩的脉动。文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振。文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵。然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差。另一方面是通过构造观测器间接减小脉动。文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因。在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差。文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响。文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响。
综上所述,本文针对永磁同步电机转矩脉动的问题,提出了一种基于构造分数阶全局滑模控制器和基于Elman神经网络电阻辨识的磁链观测器的PMSM转矩脉动抑制方法。首先,建立了PMSM的数学模型,介绍了分数阶微积分的定义,为了减小抖振且具有全局鲁棒性,设计了以磁链和转矩误差为滑模面的分数阶全局滑模控制器;另外,通过Elman神经网络完成定子电阻辨识,设计了一种考虑定子电阻变化的滑模磁链观测器来改善磁链观测精度,进一步达到抑制转矩脉动的目的。最后,在Matlab/Simulink软件和电机试验台上对本文提出的PMSM转矩抑制方法进行了仿真和试验验证,结果表明,本文所提方法可以明显减少PMSM转矩脉动。
2 系统数学模型与分数阶微分定义
2.1 PMSM数学模型
为了便于控制器设计,本文建立两相旋转坐标系下的数学模型,其电压方程可以表示为
(1) $\left\{ \begin{align} & {{u}_{d}}=R\mathop{i}_{\text{d}}+\mathop{L}_{\text{d}}\frac{\mathrm{d}\mathop{i}_{\text{d}}}{\mathrm{d}t}-{{\omega }_{\text{e}}}\mathop{L}_{\text{q}}\mathop{i}_{\text{q}} \\ & {{u}_{q}}=R\mathop{i}_{\text{q}}+\mathop{L}_{\text{q}}\frac{\mathrm{d}\mathop{i}_{\text{q}}}{\mathrm{d}t}+{{\omega }_{\text{e}}}(\mathop{L}_{\text{d}}\mathop{i}_{\text{d}}+\mathop{\psi }_{\text{f}}) \\ \end{align} \right.$
式中,${{u}_{d}}$ $\mathop{u}_{\text{q}}$ d-q 旋转坐标系下的定子电压分量;$\mathop{i}_{\text{d}}$ $\mathop{i}_{\text{q}}$ d-q 旋转坐标系下的定子电流分量;${{L}_{d}}$ ${{L}_{q}}$ d-q 旋转坐标系下的电感分量;${{\omega }_{\text{e}}}$ ${{\psi }_{\text{f}}}$ R 为定子电阻。
本文以表贴式PMSM为研究对象,其电感满足${{L}_{\text{d}}}={{L}_{\text{q}}}$
(2) ${{T}_{e}}=\frac{\text{3}}{\text{2}}\mathop{p}_{\text{n}}\mathop{i}_{\text{q}}\left[ \mathop{i}_{\text{d}}(\mathop{L}_{\text{d}}-\mathop{L}_{\text{q}})+\mathop{\psi }_{\text{f}} \right]=\frac{\text{3}}{\text{2}}\mathop{p}_{\text{n}}\mathop{i}_{\text{q}}\mathop{\psi }_{\text{f}}$
式中,${{T}_{e}}$ $\mathop{p}_{\text{n}}$
(3) ${{\psi }_{\text{d}}}=\int{\left( {{u}_{\text{d}}}-R\mathop{i}_{\text{d}} \right)\mathrm{d}t}$
(4) ${{\psi }_{\text{d}}}={{\psi }_{\text{s}}}\cos \theta $
(5) ${{i}_{\text{d}}}=\frac{{{\psi }_{\text{s}}}\cos \theta -{{\psi }_{\text{f}}}}{L}$
式中,$\theta $ $L$
为了方便后面控制器的设计,分别对$\mathop{T}_{\text{e}}$ ${{\psi }_{\text{s}}}$
(6) $\mathop{{\dot{T}}}_{\text{e}}=a{{T}_{\text{e}}}+b{{u}_{\text{q}}}+c$
(7) ${{\dot{\psi }}_{\text{s}}}=m{{\psi }_{\text{s}}}+l{{u}_{\text{d}}}+n$
式中,$a=-\frac{R}{L}$ $b=\frac{3{{p}_{\text{n}}}{{\psi }_{\text{f}}}}{\mathrm{2}L}$ $c=\frac{\text{3}}{\text{2}L}{{p}_{\text{n}}}{{\psi }_{\text{f}}}{{\omega }_{\text{e}}}\cdot $ $(-L{{i}_{d}}-{{\psi }_{\text{f}}})$ ${{\psi }_{\text{s}}}$ $m=-\frac{R}{L}$ $n=\frac{R{{\psi }_{\text{f}}}}{L\cos \theta }$ $l=\frac{1}{\cos \theta }$
2.2 分数阶微分定义
自分数阶微积分被提出以来,应用就越来越广泛,同时也越来越受到学者们的关注。它的定义首先从连续函数的整数阶导数开始,然后将整数阶导数推广到任意实数。也就是说整数阶微积分仅仅是分数阶微积分的一种特殊形式。毫无疑问,分数阶微积分相比于整数阶微积分更能准确表达确定系统的数学模型[19 ] 。并且分数阶系统具有记忆性,可以缓慢传递能量,防止抖振。利用分数阶微积分设计的控制器相比于传统整数阶控制器,具有更好的控制性能[20 -21 ] 。下面介绍分数阶微积分定义及运算性质,为下文分数阶全局滑模控制器的设计提供知识准备。
由于应用范围的不同,分数阶微积分定义的形式主要有G-L型、R-L型和Ca-Puto型三种[22 ] 。由于Ca-Puto型分数阶微积分定义能很好地应用到现实模型中,运算相对简单,且使得Laplace变换式容易求解,故广泛应用于工程背景下的物理问题中。因此,本文选择Ca-Puto型分数阶微积分的定义形式,并以此为基础设计分数阶全局滑模控制器,其统一定义为
(8) $\mathop{{}_{a}D}_{t}^{\alpha }f(t)=\left\{ \begin{align} & \frac{1}{\Gamma (n-\alpha )}\frac{\text{d}y}{\text{d}x}\int_{\ a}^{\ t}{\frac{{{f}^{(n)}}(\tau )}{{{(t-\tau )}^{\alpha -n+1}}}\text{d}\tau }\quad \text{ }n-1<\alpha <n \\ & \frac{{{\text{d}}^{n}}}{\text{d}{{t}^{n}}}f(t)\quad \text{ }\alpha =n \\ \end{align} \right.$
式中,$\mathop{{}_{a}D}_{t}^{\alpha }$ a 、t 分别为算子的下限和上限;$\alpha $ n 为不小于$\alpha $ $\frac{{{\text{d}}^{n}}}{\text{d}{{t}^{n}}}$
$\Gamma (\cdot )$
(9) $\Gamma (z)=\int_{\ 0}^{\ \infty }{\exp (-t)}\mathop{t}^{z-1}\text{d}t$
式中,$\mathop{{}_{a}D}_{t}^{\alpha }$
(10) $\mathop{{}_{a}D}_{t}^{\alpha }=\left\{ \begin{matrix} \frac{{{\text{d}}^{\alpha }}}{\text{d}{{t}^{\alpha }}}\quad \ \ \ & \operatorname{Re}(\alpha )>0 \\ 1\quad \ \ \quad \ \ & \operatorname{Re}(\alpha )=0 \\ {{\int_{\ a}^{\ t}{\left( \text{d}\tau \right)}}^{-\alpha }} & \operatorname{Re}(\alpha )<0 \\ \end{matrix} \right.$
由式(8)可知,当$n-1\le \alpha \le n$ $\mathop{{}_{a}D}_{t}^{\alpha }$ $[a,t]$ $\alpha \text{=}n$ $\mathop{{}_{a}D}_{t}^{\alpha }$ $[a,t]$
分数阶微积分有不同的定义形式,针对本文选择的定义形式,其常见计算性质如式(11)所示,将在下文控制器设计中应用到。
(11) $\left\{ \begin{align} & \mathop{{}_{a}D}_{t}^{\alpha }[\mathop{{}_{a}D}_{t}^{\beta }f(t)]=\mathop{{}_{a}D}_{t}^{\alpha +\beta }f(t) \\ & \mathop{{}_{a}D}_{t}^{\alpha }[\mathop{{}_{a}D}_{t}^{-\beta }f(t)]=\mathop{{}_{a}D}_{t}^{\alpha -\beta }f(t) \\ \end{align} \right.$
3 分数阶全局滑模控制器设计
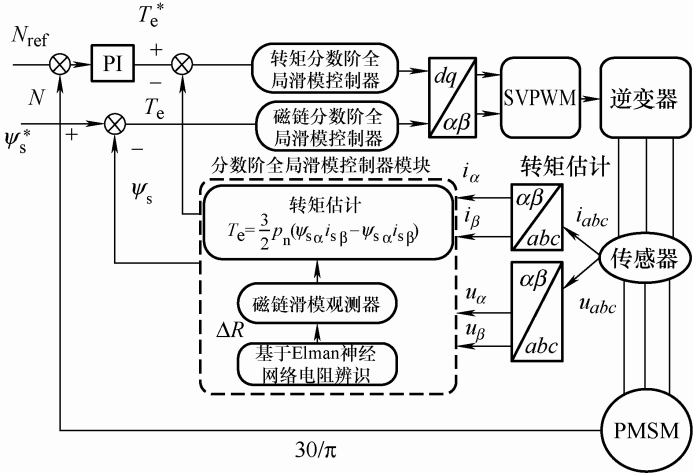
本文直接以磁链误差和转矩误差为控制器的输入,设计了分数阶全局滑模控制器取代传统DTC中的滞环控制器。全局滑模可保证系统的初始状态在滑模面上,故消除了滑模控制的趋近阶段,克服了传统滑模趋近模态不具备鲁棒性的问题,另外,分数阶滑模控制器的设计还能抑制磁链和转矩脉动。基于分数阶全局滑模和磁链观测器的PMSM DTC框图如图1 所示。
图1
图1
基于分数阶全局滑模和磁链观测器的PMSM DTC系统框图
3.1 分数阶全局滑模面设计
滑模面是滑模控制器的重要组成部分,已知分数阶控制器具有更好的控制性能。因此,可通过设计分数阶滑模面来抑制磁链和转矩脉动,提高控制性能。本文假设PMSM的转矩误差为${{e}_{\text{T}}}=T_{\text{e}}^{\text{*}}-{{T}_{\text{e}}}$ ${{e}_{\text{ }\!\!\psi\!\!\text{ }}}=\psi _{\text{s}}^{\text{*}}-{{\psi }_{\text{s}}}$ $T_{\text{e}}^{\text{*}}$ $\psi _{\text{s}}^{\text{*}}$
(12) ${{s}_{1}}={{e}_{\text{T}}}+{{c}_{1}}{}_{0}D_{t}^{-\alpha }{{e}_{\text{T}}}$
(13) ${{s}_{2}}={{e}_{\text{ }\!\!\psi\!\!\text{ }}}+{{c}_{2}}{}_{0}D_{t}^{-\alpha }{{e}_{\text{ }\!\!\psi\!\!\text{ }}}$
式中,0和t 为分数阶积分的上下限;${{c}_{1}}$ ${{c}_{2}}$
为了保证初始时刻的状态处于滑模面上,消除滑模控制的趋近模态,使系统的响应在全局都具有鲁棒性,本文在式(12)和式(13)的基础上,设计了转矩和磁链全局滑模面分别为
(14) ${{s}_{1}}={{e}_{\text{T}}}+{{c}_{1}}{}_{0}D_{t}^{-\alpha }{{e}_{\text{T}}}-f(t)$
(15) ${{s}_{2}}={{e}_{\text{ }\!\!\psi\!\!\text{ }}}+{{c}_{2}}{}_{0}D_{t}^{-\alpha }{{e}_{\text{ }\!\!\psi\!\!\text{ }}}-f(t)$
式中,$f(t)$ $f(t)$ t =0时可以保证s =0。根据$f(t)$ $f(t)=\left[ e(0)+{{c}_{1}}{}_{0}D_{t}^{-\alpha }e(t) \right]\exp (-kt)$
3.2 分数阶滑模控制器设计
已知直接转矩控制中包括两个滞环控制器和一个PI控制器,本文将传统直接转矩控制中的滞环控制器替换为分数阶全局滑模控制器,以达到减小转矩脉动的目的。
首先,对${{e}_{\text{T}}}$
(16) $\begin{matrix} {{{\dot{e}}}_{\text{T}}}=\dot{T}_{\text{e}}^{\text{*}}-{{{\dot{T}}}_{\text{e}}}=\dot{T}_{\text{e}}^{\text{*}}-a{{T}_{\text{e}}}-b{{u}_{\text{q}}}-c\text{=} \\ \text{ }\dot{T}_{\text{e}}^{\text{*}}+aT_{\text{e}}^{\text{*}}-a{{T}_{\text{e}}}-aT_{\text{e}}^{\text{*}}-b{{u}_{\text{q}}}-c\text{=} \\ \text{ }\varphi +a{{e}_{\text{T}}}-b{{u}_{\text{q}}}-c \\ \end{matrix}$
式中,$\varphi =\dot{T}_{\text{e}}^{\text{*}}-aT_{\text{e}}^{\text{*}}$
对${{e}_{\text{ }\!\!\psi\!\!\text{ }}}$
(17) $\begin{matrix} {{{\dot{e}}}_{\text{ }\!\!\psi\!\!\text{ }}}=\dot{\psi }_{\text{s}}^{\text{*}}-{{{\dot{\psi }}}_{\text{s}}}=\dot{\psi }_{\text{s}}^{\text{*}}-m{{\psi }_{\text{s}}}-l{{u}_{\text{d}}}-n= \\ \text{ }\dot{\psi }_{\text{s}}^{\text{*}}-m{{\psi }_{\text{s}}}-l{{u}_{\text{d}}}-n+m\psi _{\text{s}}^{\text{*}}-m\psi _{\text{s}}^{\text{*}}= \\ \text{ }\dot{\psi }_{\text{s}}^{\text{*}}-m\psi _{\text{s}}^{\text{*}}+m{{e}_{\text{ }\!\!\psi\!\!\text{ }}}-l{{u}_{\text{d}}}-n= \\ \text{ }\mu +m{{e}_{\text{ }\!\!\psi\!\!\text{ }}}-l{{u}_{\text{d}}}-n \\ \end{matrix}$
式中,$\mu =\dot{\psi }_{\text{s}}^{\text{*}}-m\psi _{\text{s}}^{\text{*}}$
分别对式(14)和式(15)求导,并结合式(16)和式(17)可得
(18) $\begin{matrix} \mathop{{\dot{s}}}_{1}=\mathop{{\dot{e}}}_{\text{T}}+\mathop{c}_{1}\mathop{{}_{0}D}_{t}^{1-\alpha }\mathop{e}_{\text{T}}-\dot{f}(t)= \\ \text{ }\varphi +a\mathop{e}_{\text{T}}-b\mathop{u}_{\text{q}}-c+\mathop{c}_{1}\mathop{{}_{0}D}_{t}^{1-\alpha }\mathop{e}_{\text{T}}-\dot{f}(t) \\ \end{matrix}$
(19) $\begin{matrix} \mathop{{\dot{s}}}_{2}=\mathop{{\dot{e}}}_{\text{ }\!\!\psi\!\!\text{ }}+\mathop{c}_{2}\mathop{{}_{0}D}_{t}^{1-\alpha }\mathop{e}_{\text{ }\!\!\psi\!\!\text{ }}-\dot{f}(t)= \\ \text{ }\mu +m\mathop{e}_{\text{ }\!\!\psi\!\!\text{ }}-\mathop{lu}_{\text{d}}-n+\mathop{c}_{2}\mathop{{}_{0}D}_{t}^{1-\alpha }\mathop{e}_{\text{ }\!\!\psi\!\!\text{ }}-\dot{f}(t) \\ \end{matrix}$
(20) $\left\{ \begin{align} & {{{\dot{s}}}_{1}}=\varepsilon \operatorname{sgn}({{s}_{1}}) \\ & {{{\dot{s}}}_{2}}=\varepsilon \operatorname{sgn}({{s}_{2}}) \\\end{align} \right.$
式中,$\operatorname{sgn} (s)$ $\varepsilon >0$
为了保证系统的稳定性,即满足条件$\dot{V}\le 0$
(21) ${{u}_{q}}=\frac{1}{b}\left[ \varphi +a{{e}_{T}}+{{c}_{1}}\mathop{{}_{0}D}_{t}^{1-\alpha }{{e}_{T}}-\dot{f}(t)+\varepsilon \operatorname{sgn}({{s}_{1}}) \right]$
(22) ${{u}_{d}}=\frac{1}{l}\left[ \mu +m{{e}_{\psi }}+{{c}_{2}}\mathop{{}_{0}D}_{t}^{1-\alpha }{{e}_{\psi }}-\dot{f}(t)+\varepsilon \operatorname{sgn}({{s}_{2}}) \right]$
为了消除因引入符号函数而带来的抖振,本文用双曲正切函数$H(x)$
(23) $H(x)=\tanh (x)=\frac{\exp (x)-\exp (-x)}{\exp (x)+\exp (-x)}$
3.3 滑模控制器稳定性分析
可利用李雅普诺夫稳定性判据证明全局滑模控制器的稳定性,构造李雅普诺夫函数为
(24) $V=\frac{1}{2}\mathop{s}^{2}$
(25) $\begin{matrix} {{{\dot{V}}}_{1}}={{s}_{1}}{{{\dot{s}}}_{1}}={{s}_{1}}\left[ \varphi +a{{e}_{\text{T}}}-b{{u}_{\text{q}}}-c+{{c}_{1}}\mathop{{}_{0}D}_{t}^{1-\alpha }{{e}_{\text{T}}}-\dot{f}(t) \right]= \\ {{s}_{1}}\left[ -c-\varepsilon \tanh ({{s}_{1}}) \right]\le \left| {{s}_{1}} \right|\left[ \left| -c \right|-\varepsilon \tanh (\left| {{s}_{1}} \right|) \right] \\ \end{matrix}$
因此,当$\varepsilon \tanh (\left| {{s}_{1}} \right|)\ge \left| c \right|$ ${{\dot{V}}_{1}}\le 0$
(26) $\begin{matrix} {{{\dot{V}}}_{2}}={{s}_{2}}{{{\dot{s}}}_{2}}= \\ {{s}_{2}}\left[ \mu (t)+m{{e}_{\text{ }\!\!\psi\!\!\text{ }}}-l{{u}_{\text{d}}}-n+{{c}_{2}}\mathop{{}_{0}D}_{t}^{1-\alpha }{{e}_{\text{ }\!\!\psi\!\!\text{ }}}-\dot{f}(t) \right]= \\ {{s}_{2}}\left[ -n-\varepsilon \tanh ({{s}_{2}}) \right]\le \left| {{s}_{2}} \right|\left[ \left| -n \right|-\varepsilon \tanh (\left| {{s}_{2}} \right|) \right] \\ \end{matrix}$
因此,当$\varepsilon \tanh (\left| {{s}_{2}} \right|)\ge \left| n \right|$ ${{\dot{V}}_{2}}\le 0$
根据李雅普诺夫稳定性判据可知,滑模控制器的稳定性条件是构造一个李雅普诺夫函数V ,且满足$\dot{V}\le 0$ ${{\dot{V}}_{1}}\le 0$ $\mathop{{\dot{V}}}_{2}\le 0$
4 磁链观测器设计
由PMSM数学模型可知,定子磁链观测精度会直接影响PMSM DTC的控制性能。如果磁链的相位误差过大,则会导致扇区选择错误,输出错误的电压矢量,如果磁链幅值误差过大,会使输出转矩不准确,最终会导致电机直接转矩控制的转矩脉动加剧,不利于电机使用性能的改善。
同时由电机磁链方程式(3)可知,电机定子电阻值变化也会对磁链观测结果产生影响。因此,本文为避免电机定子电阻影响观测精度,利用Elman神经网络算法对电机电阻进行了辨识,然后基于电阻辨识结果,设计了磁链滑模观测器,从而实现定子磁链的精确观测,以达到抑制转矩脉动的目的。
4.1 电机状态方程
假设三相PMSM为理想电机,选择在两相静止坐标系下建立数学模型,可以得到以${{i}_{s}}$ ${{\psi }_{s}}$
(27) $\frac{\mathrm{d}\mathbf{x}}{\mathrm{d}t}=\mathbf{Ax}+\mathbf{B}{{\mathbf{u}}_{s}}$
式中,$\mathbf{A}=\left[ \begin{matrix} {{\mathbf{A}}_{11}} & {{\mathbf{A}}_{12}} \\ {{\mathbf{A}}_{21}} & {{\mathbf{A}}_{22}} \\ \end{matrix} \right]$; ${{A}_{11}}=-\frac{R}{L}I+{{\omega }_{e}}J$;${{A}_{12}}=-\frac{{{\omega }_{e}}}{L}J$; ${{A}_{21}}=-RI$;${{A}_{22}}=0$; $x={{\left[ \begin{matrix} {{i}_{s}} & {{\psi }_{s}} \\ \end{matrix} \right]}^{\mathrm{T}}}$;$B={{\left[ \begin{matrix} {{B}_{1}} & {{B}_{2}} \\ \end{matrix} \right]}^{\mathrm{T}}}$; ${{B}_{1}}=\frac{1}{L}I$;${{B}_{2}}=I$; ${{i}_{s}}={{\left[ \begin{matrix} {{i}_{s\alpha }} & {{i}_{s\beta }} \\ \end{matrix} \right]}^{\mathrm{T}}}$; ${{\psi }_{s}}={{\left[ \begin{matrix} {{\psi }_{s\alpha }} & {{\psi }_{s\beta }} \\ \end{matrix} \right]}^{\mathrm{T}}}$;${{u}_{s}}={{\left[ \begin{matrix} {{u}_{s\alpha }} & {{u}_{s\beta }} \\ \end{matrix} \right]}^{\mathrm{T}}}$; ${{i}_{s}}$、${{\psi }_{s}}$、 ${{u}_{s}}$分别表示定子电流、定子磁链和定子电压; $I=\left[ \begin{matrix} 1 & 0 \\ 0 & 1 \\\end{matrix} \right]$;$J=\left[ \begin{matrix} 0 & -1 \\ 1 & 0 \\\end{matrix} \right]$。
4.2 磁链滑模观测器设计
在电机运行过程中,电阻会根据运行时间、外界温度、电流和频率的变化而变化,如果依然将电阻当作一个常量,则会严重影响磁链的观测精度。因此,本文设计了基于Elman神经网络电阻辨识的磁链滑模观测器,来进一步提高磁链的观测精度。
基于Elman神经网络电阻辨识的磁链滑模观测器设计思想是:首先,构造以电流和磁链为状态变量的滑模观测器,然后,用Elman神经网络完成电阻的辨识,最后,构造李雅普诺夫函数,证明本文设计观测器的稳定性。
(28) $\frac{\mathrm{d}\hat{x}}{\mathrm{d}t}=\hat{A}\hat{x}+B{{u}_{s}}+h \operatorname{sgn}(s)$
式中,$\hat{x}={{\left[ \begin{matrix} {{{\hat{i}}}_{s}} & {{{\hat{\psi }}}_{s}} \\ \end{matrix} \right]}^{\mathrm{T}}}$; ${{\hat{i}}_{s}}$、 ${{\hat{\psi }}_{s}}$为对应状态变量的观测值;$\hat{A}=\left[ \begin{matrix} {{{\hat{A}}}_{11}} & {{A}_{12}} \\ {{{\hat{A}}}_{21}} & {{A}_{22}} \\ \end{matrix} \right]$;${{\hat{A}}_{11}}=-\frac{{\hat{R}}}{L}I+{{\omega }_{e}}J{{\hat{A}}_{21}}$ $=-\hat{R}I$;${{\hat{i}}_{s}}={{\left[ \begin{matrix} {{{\hat{i}}}_{s\alpha }} & {{{\hat{i}}}_{s\beta }} \\ \end{matrix} \right]}^{\mathrm{T} }}$;${{\hat{i}}_{s\alpha }}$、 ${{\hat{i}}_{s\beta }}$为$\alpha \beta $轴的电流观测值;$\hat{R}$为定子电阻观测值;$h={{\left[ \begin{matrix} {{h}_{1}}I & {{h}_{2}}J \\ \end{matrix} \right]}^{\mathrm{T}}}$; ${{h}_{1}}{{h}_{2}}$表示滑模增益。 $s={{\left[ \begin{matrix} {{{\tilde{i}}}_{s\alpha }} & {{{\tilde{i}}}_{s\beta }} \\ \end{matrix} \right]}^{\mathrm{T} }}$; ${{\tilde{i}}_{s\alpha }}$、 ${{\tilde{i}}_{s\beta }}$为电流观测误差。
且${{\tilde{i}}_{s\alpha }}$ ${{\tilde{i}}_{s\beta }}$
(29) $\left\{ \begin{align} & \mathop{{\tilde{i}}}_{s\alpha }=\mathop{i}_{s\alpha }-\mathop{{\hat{i}}}_{s\alpha } \\ & {{{\tilde{i}}}_{s\beta }}=\mathop{i}_{s\beta }-\mathop{{\hat{i}}}_{s\beta } \\ \end{align} \right.$
(30) $\frac{\mathrm{d}\tilde{x}}{\mathrm{d}t}=A\tilde{x}-E-h\operatorname{sgn}(s)$
式中,$\tilde{x}={{\left[ \begin{matrix} {{{\tilde{i}}}_{s}} & {{{\tilde{\psi }}}_{s}} \\ \end{matrix} \right]}^{\mathrm{T}}}$ ${{\tilde{i}}_{s}}$ ${{\tilde{\psi }}_{s}}$ $E=\left[ \begin{matrix} -\frac{\Delta R}{L}I & 0 \\ -\Delta RI & 0 \\ \end{matrix} \right]\hat{x}$ $\Delta R=\hat{R}-R$ ${{\tilde{\psi }}_{s}}$ $\alpha \beta $
(31) $\left\{ \begin{align} & {{{\tilde{\psi }}}_{s\alpha }}={{\psi }_{s\alpha }}-{{{\hat{\psi }}}_{s\alpha }} \\ & {{{\tilde{\psi }}}_{s\beta }}={{\psi }_{s\beta }}-{{{\hat{\psi }}}_{s\beta }} \\ \end{align} \right.$
为了消除符号函数引入带来的抖振,用$\tanh (x)$ $\operatorname{sgn}(s)$
4.3 基于Elman神经网络的电阻辨识
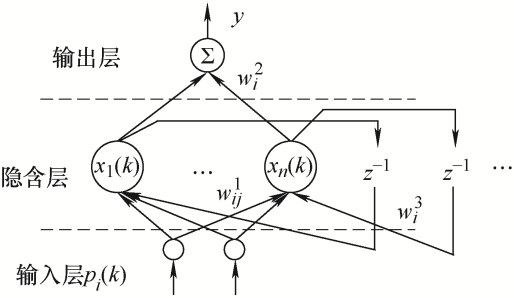
Elman神经网络是一种典型的局部回归网络,可将它看成一个具有局部记忆单元和局部反馈的前向神经网络。Elman神经网络包括输入层、隐含层、承接层和输出层。其中,承接层与每一个隐含层节点都相连接,其作用是将上一时刻的隐含层状态连同当前时刻的输入一起作为隐含层的输入。也就是说,它可从隐含层接收反馈信号,使Elman神经网络对历史数据较为敏感,对系统的动态辨识具有重要意义。Elman神经网络结构如图2 所示。
图2
图2 中,$w_{ij}^{1}$ $w_{i}^{2}$ $w_{i}^{3}$ ${{p}_{i}}(k)$ y 为神经网络的输出。
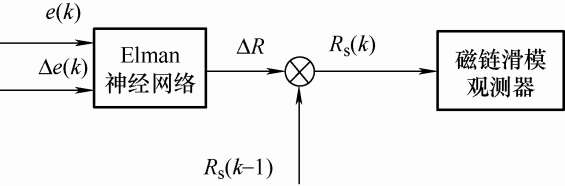
本文以定子电流参考值和定子电流实际值的差$e(k)$ $\Delta e(k)$ 图3 所示。
图3
(32) $e(k)=I_{\text{s}}^{\text{*}}(k)-{{I}_{\text{s}}}(k)$
(33) $\Delta e(k)=e(k)-e(k-1)$
(34) ${{I}_{\text{s}}}(k)=\sqrt{{{i}_{\text{ }\!\!\alpha\!\!\text{ }}}{{(k)}^{2}}+{{i}_{\text{ }\!\!\beta\!\!\text{ }}}{{(k)}^{2}}}$
式中,$I_{\text{s}}^{\text{*}}$ ${{I}_{\text{s}}}$
同时以电阻变化$\Delta R$ 图3 可知将神经网络的输出加上电阻上一时刻的值,就可以得到辨识的电阻值,然后将其用于磁链滑模观测器的设计。
为了实现对定子电阻的辨识,以下面的步骤完成对Elman神经网络的训练[23 ] 。
步骤1:初始化参数:初始权值设为[-1,1]内的随机数。
步骤2:根据仿真获得Elman神经网络的输入输出数据。
(35) $y=\sum\limits_{1}^{n}{w_{i}^{2}}\cdot f({{x}_{i}}(k))$
(36) ${{x}_{i}}(k)=e(k)\cdot w_{1j}^{1}+\Delta e(k)\cdot w_{2j}^{1}+f({{x}_{i}}(k-1))\cdot w_{i}^{3}$
式中,$f(\cdot )$
(37) $J=\frac{1}{2}{{(y-\Delta R)}^{2}}$
(38) $w(k+1)=w(k)+\eta (-\frac{\partial E(k)}{\partial w})+\alpha \Delta w(k)$
(39) $-\frac{\partial J}{\partial w_{i}^{2}}=\frac{\partial J}{\partial y}\cdot \frac{\partial y}{w_{i}^{2}}=e(k)\cdot f({{x}_{i}}(k))$
(40) $-\frac{\partial J}{\partial w_{ij}^{1}}=\frac{\partial J}{\partial y}\cdot \frac{\partial y}{w_{ij}^{1}}=e(k)\cdot {f}'({{x}_{i}}(k))\cdot {{p}_{i}}(k)$
(41) $-\frac{\partial J}{\partial w_{i}^{3}}=e(k)\cdot {f}'({{x}_{i}}(k))\cdot f({{x}_{i}}(k-1))$
如果得到的权值不小于给定的误差,则返回步骤3,直到满足小于给定误差,就可得到训练好的Elman神经网络。然后将神经网络的输出加上上一时刻的电阻值就可以得到辨识后的电阻。即有
(42) $R(k)=R(k-1)+\Delta R=R(k-1)+\sum\limits_{1}^{n}{w_{i}^{2}}\cdot f({{x}_{i}}(k))$
为了证明定子电流观测滑动模态的存在性,构造李雅普诺夫函数$V=\frac{1}{2}\left[ \begin{matrix} {{{\tilde{i}}}_{\mathrm{s }\!\!\alpha\!\!\text{ }}} & {{{\tilde{i}}}_{\mathrm{s }\!\!\beta\!\!\text{ }}} \\ \end{matrix} \right]\left[ \begin{align} & {{{\tilde{i}}}_{\mathrm{s }\!\!\alpha\!\!\text{ }}} \\ & {{{\tilde{i}}}_{\mathrm{s }\!\!\beta\!\!\text{ }}} \\ \end{align} \right]$
(43) $\begin{matrix} \dot{V}={{{\tilde{i}}}_{\mathrm{s }\!\!\alpha\!\!\text{ }}}\frac{\mathrm{d}{{{\tilde{i}}}_{\mathrm{s }\!\!\alpha\!\!\text{ }}}}{\mathrm{d}t}+{{{\tilde{i}}}_{\mathrm{s }\!\!\beta\!\!\text{ }}}\frac{\mathrm{d}{{{\tilde{i}}}_{\mathrm{s }\!\!\beta\!\!\text{ }}}}{\mathrm{d}t}=\frac{-R}{L}(\tilde{i}_{\mathrm{s }\!\!\alpha\!\!\text{ }}^{2}+\tilde{i}_{\mathrm{s }\!\!\beta\!\!\text{ }}^{2})+ \\ {{{\tilde{i}}}_{\mathrm{s }\!\!\alpha\!\!\text{ }}}\left( \frac{{{\omega }_{e}}}{L}{{{\tilde{\psi }}}_{\mathrm{s }\!\!\beta\!\!\text{ }}}+\frac{\Delta R}{L}{{{\hat{i}}}_{\mathrm{s }\!\!\alpha\!\!\text{ }}} \right)-{{{\tilde{i}}}_{\mathrm{s }\!\!\beta\!\!\text{ }}}\left( \frac{{{\omega }_{\mathrm{e}}}}{L}{{{\tilde{\psi }}}_{\mathrm{s }\!\!\alpha\!\!\text{ }}}-\frac{\Delta R}{L}{{{\hat{i}}}_{\mathrm{s }\!\!\beta\!\!\text{ }}} \right)- \\ {{h}_{1}}[{{{\tilde{i}}}_{\mathrm{s }\!\!\alpha\!\!\text{ }}}\tanh ({{{\tilde{i}}}_{\mathrm{s }\!\!\alpha\!\!\text{ }}})+{{{\tilde{i}}}_{\mathrm{s }\!\!\beta\!\!\text{ }}}\tanh ({{{\tilde{i}}}_{\mathrm{s }\!\!\beta\!\!\text{ }}})] \\ \end{matrix}$
因为${{\tilde{i}}_{\mathrm{s }\!\!\alpha\!\!\text{ }}}\tanh ({{\tilde{i}}_{\mathrm{s }\!\!\alpha\!\!\text{ }}})+{{\tilde{i}}_{\mathrm{s }\!\!\beta\!\!\text{ }}}\tanh ({{\tilde{i}}_{\mathrm{s }\!\!\beta\!\!\text{ }}})>0$ ${{h}_{1}}$ $\dot{V}\le 0$ ${{\tilde{i}}_{\mathrm{s}}}=\frac{\mathrm{d}{{{\tilde{i}}}_{\mathrm{s}}}}{\mathrm{d}t}=0$
(44) $V=\frac{1}{2}\left( \tilde{\psi }_{\mathrm{s }\!\!\alpha\!\!\text{ }}^{\mathrm{2}}+\tilde{\psi }_{\mathrm{s }\!\!\beta\!\!\text{ }}^{\mathrm{2}} \right)$
(45) $\begin{matrix} \dot{V}=\frac{-{{h}_{1}}{{h}_{2}}L}{{{\omega }_{\mathrm{e}}}}[\tanh {{({{{\tilde{i}}}_{\mathrm{s }\!\!\alpha\!\!\text{ }}})}^{2}}+\tanh {{({{{\tilde{i}}}_{\mathrm{s }\!\!\beta\!\!\text{ }}})}^{2}}]+ \\ \frac{{{h}_{2}}\Delta R}{{{\omega }_{\mathrm{e}}}}[{{i}_{\mathrm{s }\!\!\beta\!\!\text{ }}}\tanh ({{{\tilde{i}}}_{\mathrm{s }\!\!\beta\!\!\text{ }}})+{{i}_{\mathrm{s }\!\!\alpha\!\!\text{ }}}\tanh ({{{\tilde{i}}}_{\mathrm{s }\!\!\alpha\!\!\text{ }}})]+ \\ \frac{{{h}_{1}}\Delta RL}{{{\omega }_{\mathrm{e}}}}[{{i}_{\mathrm{s }\!\!\beta\!\!\text{ }}}\tanh ({{{\tilde{i}}}_{\mathrm{s }\!\!\alpha\!\!\text{ }}})-{{i}_{\mathrm{s }\!\!\alpha\!\!\text{ }}}\tanh ({{{\tilde{i}}}_{\mathrm{s }\!\!\beta\!\!\text{ }}})]\le \\ \frac{-{{h}_{1}}{{h}_{2}}L[\tanh {{({{{\tilde{i}}}_{\mathrm{s }\!\!\alpha\!\!\text{ }}})}^{2}}+\tanh {{({{{\tilde{i}}}_{\mathrm{s }\!\!\beta\!\!\text{ }}})}^{2}}]}{{{\omega }_{\mathrm{e}}}}+ \\ \frac{{{h}_{2}}\left| \Delta R \right|\left( \left| {{i}_{\mathrm{s }\!\!\beta\!\!\text{ }}} \right|+\left| {{i}_{\mathrm{s }\!\!\alpha\!\!\text{ }}} \right| \right)+{{h}_{1}}L\left| \Delta R \right|(\left| {{i}_{\mathrm{s }\!\!\beta\!\!\text{ }}} \right|+\left| {{i}_{\mathrm{s }\!\!\alpha\!\!\text{ }}} \right|)}{{{\omega }_{\mathrm{e}}}} \\ \end{matrix}$
当${{h}_{1}}={{h}_{2}}\ge \frac{2\left| \Delta R \right|(\left| {{i}_{\mathrm{s }\!\!\beta\!\!\text{ }}} \right|+\left| {{i}_{\mathrm{s }\!\!\alpha\!\!\text{ }}} \right|)}{L[\tanh {{({{{\tilde{i}}}_{\mathrm{s }\!\!\alpha\!\!\text{ }}})}^{2}}+\tanh {{({{{\tilde{i}}}_{\mathrm{s }\!\!\beta\!\!\text{ }}})}^{2}}]}$
5 试验验证
为了进一步验证本文所提方法的有效性,搭建了电机试验台架。试验台架由PMSM、电机试验箱和上位机组成。将Simulink中的仿真模型通过CCS6.2生成可以在DSP中运行的代码,再将代码下载到TMS320F28335之中,然后由逆变器输出信号,完成对PMSM的控制。试验中,利用串联可变电阻来模拟定子电阻的变化。为了获得更好的控制效果选择$\varepsilon =90$ ${{c}_{1}}=30$ ${{c}_{2}}=33$ 图4 所示,电机参数如表1 所示。
图4
5.1 分数阶阶次确定及电阻辨识分析
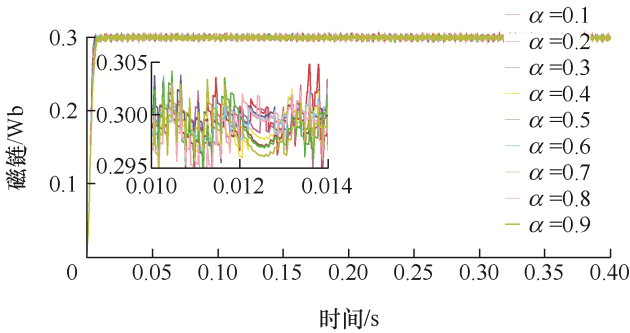
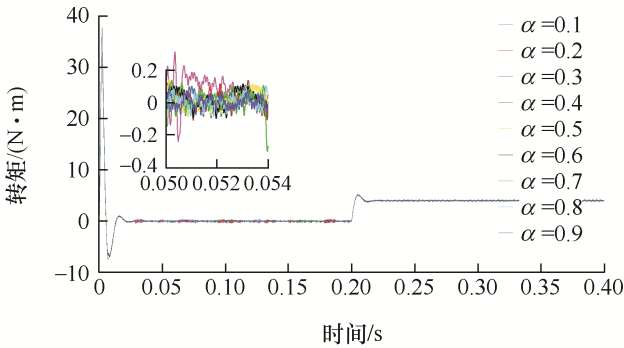
首先,仿真确定分数阶全局滑模控制器的阶次。将分数阶全局滑模控制器的阶次分别选择α =0.1、α =0.2、α =0.3、α =0.4、α =0.5、α =0.6、α =0.7、α =0.8、α =0.9来进行仿真分析。通过仿真得到不同阶次全局滑模控制器控制下的磁链和转矩值,然后确定最优的阶次。为了确保磁链观测效果仅与α 的取值有关,设置分数阶全局滑模控制器和磁链观测器的其他参数相同,仿真结果如图5 和图6 所示。
图5
图6
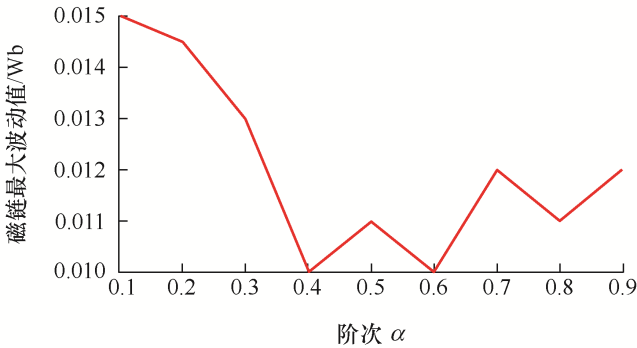
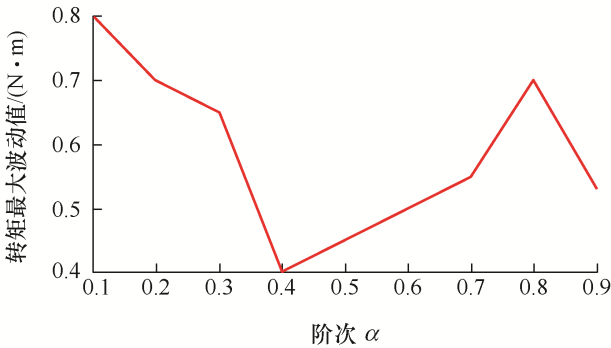
图7 和图8 分别为不同阶次下分数阶全局滑模控制器的磁链和转矩的最大波动值曲线。
图7
图8
由图7 和图8 可知,当分数阶阶次为0.4时,磁链和转矩的波动值均较小。因此,本文后续仿真与试验分析中,采用分数阶阶次为0.4的分数阶全局滑模控制器来对PMSM转矩波动抑制进行研究。
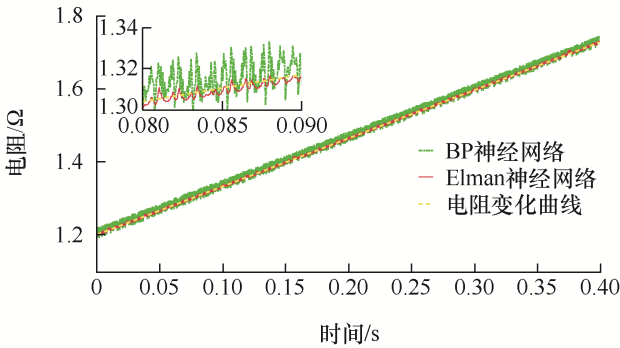
其次,通过仿真分析证明本文所提电阻辨识方法的有效性,并将本文提出的Elman神经网络方法和传统BP神经网络方法进行对比,仿真时设定电阻值由1.2 Ω变化到1.75 Ω,其仿真结果如图9 所示。
图9
由图9 可知,本文提出的Elman神经网络辨识的电阻值在电阻变化值附近变化,而传统的BP神经网络的电阻辨识值波动较大。因此,仿真结果表明相比于传统BP神经网络,Elman神经网络可以更好地完成定子电阻的辨识。
5.2 试验分析
根据确定的分数阶阶次和本文提出的电阻辨识方法,利用Matlab/Simulink建立如图1 所示的基于分数阶全局滑模和磁链观测器的PMSM DTC系统,并生成代码,通过CCS6.2编译后利用仿真器将C代码下载到DSP控制箱中,完成对PMSM的转矩脉动抑制试验。
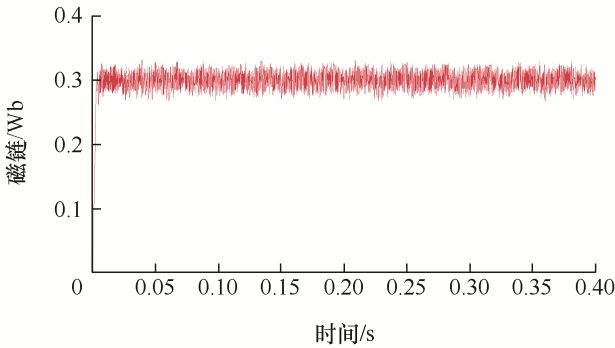
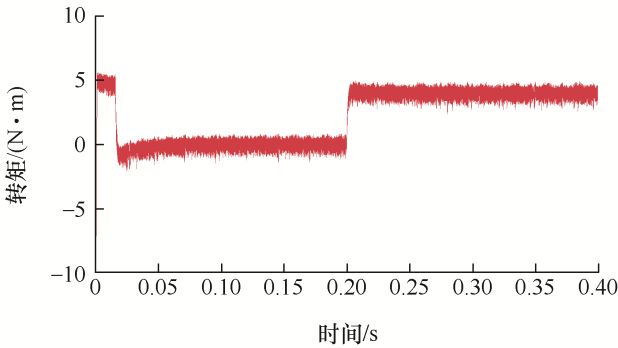
图10 和图11 为传统DTC中的磁链和转矩图。传统DTC中采用了滞环控制器,由于滞环容差值的存在,导致较大的转矩脉动。由图10 可知其磁链观测误差为0.06 Wb左右,对于图11 ,本文在0.2 s时施加4 N·m的负载转矩。此时转矩脉动范围最大为2 N·m,通过与下面试验的对比可知,采用分数阶全局滑模控制器可以极大减少传统滞环控制中的转矩脉动。
图10
图11
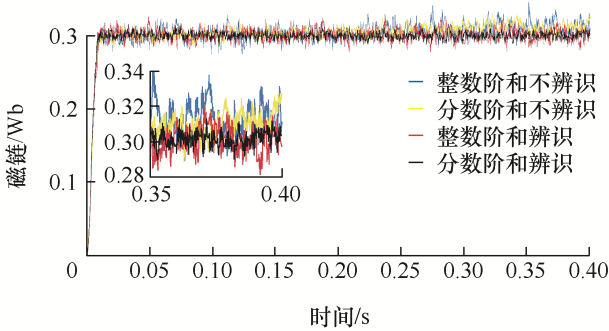
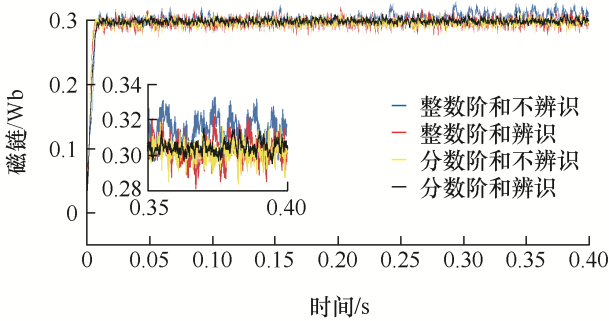
图12 和图13 分别为基于电阻不辨识磁链滑模观测的整数阶、分数阶全局滑模和基于电阻辨识磁链滑模观测的分数阶、整数阶全局滑模的磁链试验对比结果。其中,图12 为给定转速为80 r/min的磁链对比图,由结果可知,基于Elman神经网络电阻辨识磁链滑模观测的分数阶和整数阶全局滑模控制,其磁链脉动范围最大为0.03 Wb和0.04 Wb,其他电阻不辨识磁链观测的分数阶和整数阶全局滑模控制的磁链脉动范围最大分别为0.04 Wb、0.05 Wb。图13 为给定转速为800 r/min的磁链对比图,由结果可知,基于Elman神经网络电阻辨识磁链滑模观测的分数阶和整数阶全局滑模控制,其磁链脉动范围最大为0.025 Wb和0.035 Wb,其他电阻不辨识磁链观测的分数阶和整数阶全局滑模控制的磁链脉动范围最大为0.03 Wb、0.04 Wb。因此,试验证明了分数阶全局滑模控制器和基于Elman神经网络电阻辨识的磁链观测器可以有效地降低磁链脉动,同时基于Elman神经网络电阻辨识的磁链观测器在低速工况下对磁链脉动也有较好的抑制效果。
图12
图13
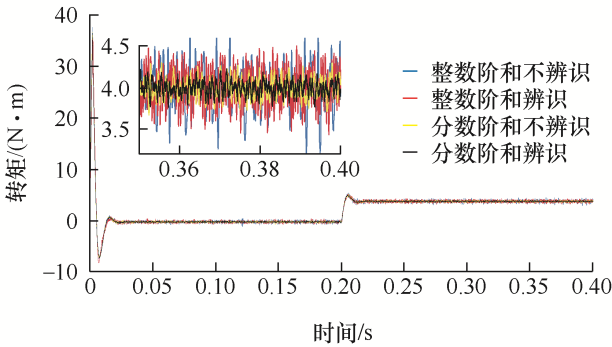
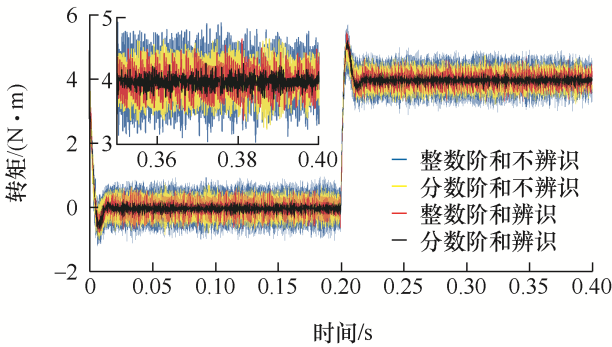
同理,图14 和图15 为四种方法的转矩试验对比结果。其中,图14 为给定转速为800 r/min的转矩对比图,并且在0.2 s时施加4 N·m的负载。由图14 可知,基于Elman神经网络电阻辨识磁链滑模观测的分数阶和整数阶全局滑模控制,其转矩脉动范围最大为0.4 N·m和1 N·m,其他电阻不辨识磁链观测的分数阶和整数阶全局滑模控制的转矩脉动范围最大为0.6 N·m、1.2 N·m。图15 为给定转速为80 r/min的转矩对比图,并且在0.2 s时施加4 N·m的负载。由图15 可知,基于Elman神经网络电阻辨识磁链滑模观测的分数阶和整数阶全局滑模控制,其转矩脉动范围最大为0.6 N·m和1.2 N·m,其他电阻不辨识磁链观测的分数阶和整数阶全局滑模控制的转矩脉动最大为1.2 N·m、1.8 N·m。因此,试验证明了分数阶全局滑模控制器和基于Elman神经网络电阻辨识的磁链观测器可以有效地降低转矩脉动,同时基于Elman神经网络电阻辨识的磁链观测器在低速工况下对转矩脉动有更好的抑制效果。
图14
图15
6 结论
针对传统DTC的转矩脉动大的问题,本文以PMSM磁链和转矩误差来设计分数阶滑模面,构建分数阶全局滑模控制器代替传统DTC中的滞环控制器。其次,提出了一种基于Elman神经网络电阻辨识的磁链滑模观测器,实现对定子电阻值的精确辨识。最后,构建基于分数阶全局滑模控制和Elman神经网络电阻辨识的磁链观测的PMSM控制系统,并进行了仿真与试验分析,得到如下结论。
(1) 本文提出的分数阶全局滑模控制器可以有效地解决传统滑模控制的抖振问题,并且降低传统DTC的磁链和转矩脉动。
(2) 本文提出的基于Elman神经网络电阻辨识的磁链滑模观测器有更高的观测精度,对定子电阻变化具有鲁棒性,可以有效地降低磁链和转矩脉动,同时在低速工况下,对磁链和转矩的抑制效果更好。
(3) 将两种方法相结合对电机直接转矩控制中转矩脉动抑制具有较好效果。
参考文献
View Option
[1]
时培成 , 王锁 , 张荣芸 , 等 . 无刷直流电机两管导通零矢量直接转矩控制
[J]. 中国机械工程 , 2020 , 31 (6 ):670 -678 .
[本文引用: 1]
SHI Peicheng WANG Suo ZHANG Rongyun et al. Two-tube conduction zero vector direct torque control of brushless DC motor
[J]. China Mechanical Engineering , 2020 , 31 (6 ):670 -678 .
[本文引用: 1]
[2]
谭风雷 . DTC转矩脉动抑制方法研究现状及仿真分析
[J]. 电力安全技术 , 2017 , 19 (1 ):33 -38 .
[本文引用: 1]
TAN Fenglei Research status and simulation analysis of DTC torque ripple suppression method
[J]. Electric Power Safety Technology , 2017 , 19 (1 ):33 -38 .
[本文引用: 1]
[3]
林立 , 刘凡 . 基于滑模控制的PMSM直接转矩控制研究
[J]. 电气传动自动化 , 2021 , 43 (5 ):1 -5 .
[本文引用: 1]
LIN Li LIU Fan Research on PMSM direct torque control based on sliding mode control
[J]. Automation of Electric Drive , 2021 , 43 (5 ):1 -5 .
[本文引用: 1]
[4]
杨蕾 , 李胜男 , 黄伟 , 等 . 永磁同步发电机自适应分数阶PID控制设计
[J]. 电力系统保护与控制 , 2020 , 48 (9 ):49 -58 .
[本文引用: 1]
YANG Lei LI Shengnan HUANG Wei et al. Adaptive fractional-order PID control design of permanent magnetic synchronous generator
[J]. Power System Protection and Control , 2020 , 48 (9 ):49 -58 .
[本文引用: 1]
[5]
张荣芸 , 郑常胜 , 时培成 , 等 . 基于改进PSO与广义五阶CKF算法的PMSM无传感器控制
[J]. 电机与控制学报 , 2021 , 25 (7 ):120 -128 .
[本文引用: 1]
ZHANG Rongyun ZHENG Changsheng SHI Peicheng et al. Sensorless control of PMSM based on improved PSO and generalized fifth order CKF algorithm
[J]. Electric Machines and Control , 2021 , 25 (7 ):120 -128 .
[本文引用: 1]
[6]
ZHANG Rongyun GONG Changfu SHI Peicheng et al. The permanent magnet synchronous motor sensorless control of electric power steering based on iterative fifth-order cubature Kalman filter
[J]. Journal of Dynamic Systems Measurement and Control , 2020 , 142 (8 ):081004 .
DOI:10.1115/1.4046613
URL
[本文引用: 1]
A discrete mathematical model of a permanent magnet synchronous motor (PMSM) is established, then the fifth-order cubature Kalman filter (CKF) algorithm is introduced. A Gauss–Newton iterative method is introduced into the iterative process of the fifth-order CKF algorithm to generate the innovation variance and covariance. Therefore, an iterative fifth-order CKF algorithm is proposed as the basis of a PMSM sensorless control is implemented. Then, a PMSM sensorless control based on the iterative fifth-order CKF algorithm is applied to an electric power steering (EPS) system, whose control system is constructed by adopting the typical assist and return control strategy. Finally, to verify the performance of the proposed PMSM sensorless control method, the EPS system model of the PMSM sensorless control is built by using the common phase-locked loop (PLL), the CKF algorithm, the fifth-order CKF algorithm, and the proposed iterative fifth-order CKF algorithm. The simulation analyses and the experimental tests show that the proposed iterative fifth-order CKF algorithm can estimate the PMSM speed with good accuracy and has a strong resistance to disturbances in the load and speed. The assist and return performances of the EPS system are also improved.
[7]
余同 , 刘军 , 孙维凡 . 基于模糊理论的内置式永磁同步电机弱磁控制仿真研究
[J]. 电气工程学报 , 2019 , 14 (1 ):1 -8 .
[本文引用: 1]
YU Tong LIU Jun SUN Weifan Simulation research on weak magnetic control of built-in permanent magnet synchronous motor based on fuzzy theory
[J]. Journal of Electrical Engineering , 2019 , 14 (1 ):1 -8 .
[本文引用: 1]
[8]
朱亮 , 张阳 , 吴洪涛 , 等 . 基于模糊PI有效磁链直接转矩控制系统的研究
[J]. 湖南工业大学学报 , 2020 , 34 (5 ):1 -7 .
[本文引用: 1]
ZHU Liang ZHANG Yang WU Hongtao et al. Research on effective flux linkage direct torque control system on fuzzy PI
[J]. Journal of Hunan University of Technology , 2020 , 34 (5 ):1 -7 .
[本文引用: 1]
[9]
金石 , 宋顺千 , 金无痕 , 等 . 新型复合转子双定子同步电机的复合滑模控制
[J]. 电气工程学报 , 2021 , 16 (2 ):93 -99 .
[本文引用: 1]
JIN Shi SONG Shunqian JIN Wuhen et al. Composite sliding mode control of a novel composite rotor double stator synchronous motor
[J]. Journal of Electrical Engineering , 2021 , 16 (2 ):93 -99 .
[本文引用: 1]
[10]
ZHANG Rongyun GONG Changfu SHI Peicheng et al. Research on chaos control of permanent magnet synchronous motor based on the synthetical sliding mode control of inverse system decoupling
[J]. Journal of Vibration Control , 2021 , 27 (9-10 ):1009 -1019 .
DOI:10.1177/1077546320936499
URL
[本文引用: 1]
This article focuses on realizing the chaos control of a permanent magnet synchronous motor by combining a pseudo-linear inverse system of the permanent magnet synchronous motor and synthetical sliding mode control. First, the permanent magnet synchronous motor dimensionless nonlinear mathematical model is established, and its chaos is analyzed by the Lyapunov exponent method. The permanent magnet synchronous motor parameter range when chaos appears is obtained. Then, the inverse system decoupling method is used to analyze the reversibility of the permanent magnet synchronous motor system, and the permanent magnet synchronous motor inverse system is obtained, which is compounded with the original system into a pseudo-linear inverse system that consists of two independent subsystems, including a first-order d-axis current system and a second-order rotational speed system, to decouple the permanent magnet synchronous motor system. Third, the first-order d-axis subsystem is controlled by sliding mode control with a hyperbolic tangent function as the switching function, and the second-order speed subsystem is controlled by super-twisting sliding mode control with a hyperbolic tangent function as the switching function, which is called the synthetical sliding mode control. The permanent magnet synchronous motor pseudo-linear inverse system is controlled by using the synthetical sliding mode to realize the chaos control of the permanent magnet synchronous motor. Finally, three kinds of permanent magnet synchronous motor chaos control systems are established in MATLAB/Simulink software, and the experimental tests are implemented. The results show that the proposed permanent magnet synchronous motor chaos control system has good performance, which can effectively eliminate chattering in sliding mode control and control chaos in the permanent magnet synchronous motor system.
[11]
许德智 , 黄泊珉 , 杨玮林 . 神经网络自适应的永磁直线同步电机超扭曲终端滑模控制
[J]. 电力系统保护与控制 , 2021 , 49 (13 ):64 -71 .
[本文引用: 1]
XU Dezhi HUANG Bomin YANG Weilin Neural network adaptive super twist terminal sliding mode control of permanent magnet linear synchronous motor
[J]. Power System Protection and Control , 2021 , 49 (13 ):64 -71 .
[本文引用: 1]
[12]
HAMDI H REGAGA C B ZAAFOURI A A sliding-neural network control of induction-motor-pump supplied by photovoltaic generator
[J]. Protection and Control of Modern Power Systems , 2019 , 5 (1 ):446 -455 .
[本文引用: 1]
[13]
ZHAO Y HUANG Z Fuzzy direct torque control of permanent magnet synchronous motors
[C]// International Conference on Fuzzy Systems and Knowledge Discovery. IEEE , 2016 :330 -334 .
[本文引用: 1]
[14]
潘峰 , 闫庚龙 , 苑伟华 , 等 . 基于双滑模的永磁同步电机直接转矩控制
[J]. 电工技术学报 , 2018 , 33 (z2 ):427 -433 .
[本文引用: 1]
PAN Feng YAN Genglong YUAN Weihua et al. Research on direct torque control for permanent magnet synchronous motor based on the double sliding mode
[J]. Transactions of China Electrotechnical Society , 2018 , 33 (z2 ):427 -433 .
[本文引用: 1]
[15]
JIANG Z KARIM K A new approach for adaptive sliding mode control:Integral/exponential gain law
[J]. Transactions of the Institute of Measurement and Control , 2016 , 38 (4 ):385 -394 .
DOI:10.1177/0142331215583328
URL
[本文引用: 1]
This paper proposes a new approach for adaptive sliding mode controller (ASMC) designs. The goal is to obtain robust, smooth, and fast transient performance for nonlinear systems with finite uncertainties of unknown bounds and limited available inputs so that the phenomena of the slow response and the gain overestimation in most ASMC designs can be greatly improved. Sufficient and necessary conditions for the existence of a sliding mode in the ASMC designs are discussed. Based on the sufficient conditions, we introduce an integral/exponential adaptation law targeting the reduction of the chatter levels of the sliding mode by significantly reducing the gain overestimation while simultaneously speeding up the system response to the uncertainties. An illustrative example and numerical simulations are performed to convey the discussed results.
[16]
李明中 , 杨振强 , 张峰 . 基于电压模型改进型定子磁链观测器
[J]. 微电机 , 2015 , 48 (6 ):65 -68 .
[本文引用: 1]
LI Mingzhong YANG Zhenqiang ZHANG Feng Improved stator flux estimation method based on voltage model
[J]. Micromotors , 2015 , 48 (6 ):65 -68 .
[本文引用: 1]
[17]
INANC N A new sliding mode flux and current observer for direct field oriented induction motor drives
[J]. Electric Power Systems Research , 2002 , 63 (2 ):113 -118 .
DOI:10.1016/S0378-7796(02)00084-6
URL
[本文引用: 1]
[18]
曹亚丽 , 曹竣奥 , 宋昕 , 等 . 一种改进滑模观测器的PMSM矢量控制研究
[J]. 电力系统保护与控制 , 2021 , 49 (16 ):104 -111 .
[本文引用: 1]
CAO Yali CAO Junao SONG Xin et al. Research on PMSM vector control with improved sliding mode observer
[J]. Power System Protection and Control , 2021 , 49 (16 ):104 -111 .
[本文引用: 1]
[20]
刘宁 , 赵鸿菲 , 赵志诚 . 无刷直流电机的分数阶滑模控制器设计
[J]. 火力与指挥控制 , 2018 , 43 (6 ):81 -85 .
[本文引用: 1]
LIU Ning ZHAO Hongfei ZHAO Zhicheng Design of fractional-order sliding mode controller for brushless DC motor
[J]. Fire Control & Command Control , 2018 , 43 (6 ):81 -85 .
[本文引用: 1]
[21]
何秋生 , 牛军政 , 陈伟 . 分数阶终端滑模控制器在DTC系统中的应用
[J]. 火力与指挥控制 , 2017 , 42 (9 ):74 -78 .
[本文引用: 1]
HE Qiusheng NIU Junzheng CHEN Wei Application of fractional-order terminal sliding mode controller in DTC system
[J]. Fire Control & Command Control , 2017 , 42 (9 ):74 -78 .
[本文引用: 1]
[22]
SALES TEODORO G TENREIRO MACHADO J A CAPELAS d O E A review of definitions of fractional derivatives and other operators
[J]. Journal of Computational Physics , 2019 , 388 :195 -208 .
DOI:10.1016/j.jcp.2019.03.008
[本文引用: 1]
Given the increasing number of proposals and definitions of operators in the scope of fractional calculus, it is important to introduce a systematic classification. Nonetheless, many of the definitions that emerged in the literature can not be considered as fractional derivatives. We analyze a list of expressions to have a general overview of the concept of fractional (integrals) derivatives. Moreover, some formulae that do not involve the term fractional, are also included due to their particular interest in the area. (C) 2019 Elsevier Inc.
[23]
范波 , 刘刚 , 史光辉 . 一种感应电机矢量控制转子电阻在线辨识方案
[J]. 电气传动 , 2013 , 43 (11 ):11 -16 .
[本文引用: 1]
FAN Bo LIU Gang SHI Guanghui Scheme for motor rotor resistance on-line identification in vector control of induction motor
[J]. Electric Drive , 2013 , 43 (11 ):11 -16 .
[本文引用: 1]
无刷直流电机两管导通零矢量直接转矩控制
1
2020
... 永磁同步电机(Permanent magnet synchronous motor, PMSM)因功率因数高、结构简单、可靠性好等优点,在汽车驱动领域、办公自动化设备以及高精度加工等方面获得了广泛应用.传统直接转矩控制通过滞环控制器和逆变器完成转矩控制,但逆变器的开关频率不高以及滞环控制的不精确性会导致转矩的脉动[1 ⇓ -3 ] ,这使得永磁同步电机的应用受到了较大限制,因此,转矩脉动的抑制成为了倍受关注的问题. ...
Two-tube conduction zero vector direct torque control of brushless DC motor
1
2020
... 永磁同步电机(Permanent magnet synchronous motor, PMSM)因功率因数高、结构简单、可靠性好等优点,在汽车驱动领域、办公自动化设备以及高精度加工等方面获得了广泛应用.传统直接转矩控制通过滞环控制器和逆变器完成转矩控制,但逆变器的开关频率不高以及滞环控制的不精确性会导致转矩的脉动[1 ⇓ -3 ] ,这使得永磁同步电机的应用受到了较大限制,因此,转矩脉动的抑制成为了倍受关注的问题. ...
DTC转矩脉动抑制方法研究现状及仿真分析
1
2017
... 永磁同步电机(Permanent magnet synchronous motor, PMSM)因功率因数高、结构简单、可靠性好等优点,在汽车驱动领域、办公自动化设备以及高精度加工等方面获得了广泛应用.传统直接转矩控制通过滞环控制器和逆变器完成转矩控制,但逆变器的开关频率不高以及滞环控制的不精确性会导致转矩的脉动[1 ⇓ -3 ] ,这使得永磁同步电机的应用受到了较大限制,因此,转矩脉动的抑制成为了倍受关注的问题. ...
Research status and simulation analysis of DTC torque ripple suppression method
1
2017
... 永磁同步电机(Permanent magnet synchronous motor, PMSM)因功率因数高、结构简单、可靠性好等优点,在汽车驱动领域、办公自动化设备以及高精度加工等方面获得了广泛应用.传统直接转矩控制通过滞环控制器和逆变器完成转矩控制,但逆变器的开关频率不高以及滞环控制的不精确性会导致转矩的脉动[1 ⇓ -3 ] ,这使得永磁同步电机的应用受到了较大限制,因此,转矩脉动的抑制成为了倍受关注的问题. ...
基于滑模控制的PMSM直接转矩控制研究
1
2021
... 永磁同步电机(Permanent magnet synchronous motor, PMSM)因功率因数高、结构简单、可靠性好等优点,在汽车驱动领域、办公自动化设备以及高精度加工等方面获得了广泛应用.传统直接转矩控制通过滞环控制器和逆变器完成转矩控制,但逆变器的开关频率不高以及滞环控制的不精确性会导致转矩的脉动[1 ⇓ -3 ] ,这使得永磁同步电机的应用受到了较大限制,因此,转矩脉动的抑制成为了倍受关注的问题. ...
Research on PMSM direct torque control based on sliding mode control
1
2021
... 永磁同步电机(Permanent magnet synchronous motor, PMSM)因功率因数高、结构简单、可靠性好等优点,在汽车驱动领域、办公自动化设备以及高精度加工等方面获得了广泛应用.传统直接转矩控制通过滞环控制器和逆变器完成转矩控制,但逆变器的开关频率不高以及滞环控制的不精确性会导致转矩的脉动[1 ⇓ -3 ] ,这使得永磁同步电机的应用受到了较大限制,因此,转矩脉动的抑制成为了倍受关注的问题. ...
永磁同步发电机自适应分数阶PID控制设计
1
2020
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
Adaptive fractional-order PID control design of permanent magnetic synchronous generator
1
2020
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
基于改进PSO与广义五阶CKF算法的PMSM无传感器控制
1
2021
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
Sensorless control of PMSM based on improved PSO and generalized fifth order CKF algorithm
1
2021
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
The permanent magnet synchronous motor sensorless control of electric power steering based on iterative fifth-order cubature Kalman filter
1
2020
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
基于模糊理论的内置式永磁同步电机弱磁控制仿真研究
1
2019
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
Simulation research on weak magnetic control of built-in permanent magnet synchronous motor based on fuzzy theory
1
2019
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
基于模糊PI有效磁链直接转矩控制系统的研究
1
2020
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
Research on effective flux linkage direct torque control system on fuzzy PI
1
2020
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
新型复合转子双定子同步电机的复合滑模控制
1
2021
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
Composite sliding mode control of a novel composite rotor double stator synchronous motor
1
2021
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
Research on chaos control of permanent magnet synchronous motor based on the synthetical sliding mode control of inverse system decoupling
1
2021
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
神经网络自适应的永磁直线同步电机超扭曲终端滑模控制
1
2021
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
Neural network adaptive super twist terminal sliding mode control of permanent magnet linear synchronous motor
1
2021
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
A sliding-neural network control of induction-motor-pump supplied by photovoltaic generator
1
2019
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
Fuzzy direct torque control of permanent magnet synchronous motors
1
2016
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
基于双滑模的永磁同步电机直接转矩控制
1
2018
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
Research on direct torque control for permanent magnet synchronous motor based on the double sliding mode
1
2018
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
A new approach for adaptive sliding mode control:Integral/exponential gain law
1
2016
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
基于电压模型改进型定子磁链观测器
1
2015
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
Improved stator flux estimation method based on voltage model
1
2015
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
A new sliding mode flux and current observer for direct field oriented induction motor drives
1
2002
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
一种改进滑模观测器的PMSM矢量控制研究
1
2021
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
Research on PMSM vector control with improved sliding mode observer
1
2021
... 目前,许多学者主要通过以下控制方法来实现转矩脉动抑制,如PI控制[4 ⇓ -6 ] 、模糊控制[7 -8 ] 以及滑模控制[9 ⇓ ⇓ -12 ] 等.PI控制可以一定程度上降低转矩脉动,但传统PI控制器的参数确定较为复杂,可供选择的参数整定方法较少,且PI控制器对电机参数、转速和负载变化都较为敏感,对电机的工作环境要求较高.为了克服PI参数调节困难和鲁棒性较差的问题,很多学者提出了模糊控制.例如文献[13 ]设计了一种新型模糊控制器代替PI控制器,一定程度上克服了PI参数调节困难和鲁棒性较差的问题,但模糊规则的建立较为困难,模糊规则制定不合理还可能会导致模糊控制效果变差.针对以上问题,有学者提出了滑模控制策略.滑模控制可在两个方面减小转矩脉动.一方面是通过构造滑模控制器来减小转矩的脉动.文献[14 ]提出一种双滑模控制方案,通过分别设计磁链和转矩控制器代替滞环控制器实现对PMSM的控制,该方案可以克服传统滞环控制器的脉动,但该滑模控制器以sign函数作为切换函数,又给系统带来了高频抖振.文献[15 ]提出了基于新型趋近率的滑模控制器,在设计趋近律的过程中,将sign函数替换为sat函数,一定程度上减小了抖阵.然而上述文献中提出的都是整数阶滑模,且仅在滑模的滑动阶段具有鲁棒性,不具备全局鲁棒性,导致趋近阶段的控制效果较差.另一方面是通过构造观测器间接减小脉动.文献[16 ]设计了电压型定子磁链观测器,由电压型定子磁链观测器表达式可知,定子电阻的变化是导致定子磁链观测不准确的主要原因.在定子电阻可变的场合,电压型定子磁链观测器观测到的磁链幅值有着较大的误差.文献[17 ]提出了基于电流模型的磁链观测器,但没有考虑电机参数对观测结果的影响.文献[18 ]提出一种扩展卡尔曼滤波与滑模观测器结合的方法减小系统抖振,但是仍然没有考虑定子电阻变化对结果的影响. ...
Global robustness for max-pluslinear systems
1
2017
... 自分数阶微积分被提出以来,应用就越来越广泛,同时也越来越受到学者们的关注.它的定义首先从连续函数的整数阶导数开始,然后将整数阶导数推广到任意实数.也就是说整数阶微积分仅仅是分数阶微积分的一种特殊形式.毫无疑问,分数阶微积分相比于整数阶微积分更能准确表达确定系统的数学模型[19 ] .并且分数阶系统具有记忆性,可以缓慢传递能量,防止抖振.利用分数阶微积分设计的控制器相比于传统整数阶控制器,具有更好的控制性能[20 -21 ] .下面介绍分数阶微积分定义及运算性质,为下文分数阶全局滑模控制器的设计提供知识准备. ...
无刷直流电机的分数阶滑模控制器设计
1
2018
... 自分数阶微积分被提出以来,应用就越来越广泛,同时也越来越受到学者们的关注.它的定义首先从连续函数的整数阶导数开始,然后将整数阶导数推广到任意实数.也就是说整数阶微积分仅仅是分数阶微积分的一种特殊形式.毫无疑问,分数阶微积分相比于整数阶微积分更能准确表达确定系统的数学模型[19 ] .并且分数阶系统具有记忆性,可以缓慢传递能量,防止抖振.利用分数阶微积分设计的控制器相比于传统整数阶控制器,具有更好的控制性能[20 -21 ] .下面介绍分数阶微积分定义及运算性质,为下文分数阶全局滑模控制器的设计提供知识准备. ...
Design of fractional-order sliding mode controller for brushless DC motor
1
2018
... 自分数阶微积分被提出以来,应用就越来越广泛,同时也越来越受到学者们的关注.它的定义首先从连续函数的整数阶导数开始,然后将整数阶导数推广到任意实数.也就是说整数阶微积分仅仅是分数阶微积分的一种特殊形式.毫无疑问,分数阶微积分相比于整数阶微积分更能准确表达确定系统的数学模型[19 ] .并且分数阶系统具有记忆性,可以缓慢传递能量,防止抖振.利用分数阶微积分设计的控制器相比于传统整数阶控制器,具有更好的控制性能[20 -21 ] .下面介绍分数阶微积分定义及运算性质,为下文分数阶全局滑模控制器的设计提供知识准备. ...
分数阶终端滑模控制器在DTC系统中的应用
1
2017
... 自分数阶微积分被提出以来,应用就越来越广泛,同时也越来越受到学者们的关注.它的定义首先从连续函数的整数阶导数开始,然后将整数阶导数推广到任意实数.也就是说整数阶微积分仅仅是分数阶微积分的一种特殊形式.毫无疑问,分数阶微积分相比于整数阶微积分更能准确表达确定系统的数学模型[19 ] .并且分数阶系统具有记忆性,可以缓慢传递能量,防止抖振.利用分数阶微积分设计的控制器相比于传统整数阶控制器,具有更好的控制性能[20 -21 ] .下面介绍分数阶微积分定义及运算性质,为下文分数阶全局滑模控制器的设计提供知识准备. ...
Application of fractional-order terminal sliding mode controller in DTC system
1
2017
... 自分数阶微积分被提出以来,应用就越来越广泛,同时也越来越受到学者们的关注.它的定义首先从连续函数的整数阶导数开始,然后将整数阶导数推广到任意实数.也就是说整数阶微积分仅仅是分数阶微积分的一种特殊形式.毫无疑问,分数阶微积分相比于整数阶微积分更能准确表达确定系统的数学模型[19 ] .并且分数阶系统具有记忆性,可以缓慢传递能量,防止抖振.利用分数阶微积分设计的控制器相比于传统整数阶控制器,具有更好的控制性能[20 -21 ] .下面介绍分数阶微积分定义及运算性质,为下文分数阶全局滑模控制器的设计提供知识准备. ...
A review of definitions of fractional derivatives and other operators
1
2019
... 由于应用范围的不同,分数阶微积分定义的形式主要有G-L型、R-L型和Ca-Puto型三种[22 ] .由于Ca-Puto型分数阶微积分定义能很好地应用到现实模型中,运算相对简单,且使得Laplace变换式容易求解,故广泛应用于工程背景下的物理问题中.因此,本文选择Ca-Puto型分数阶微积分的定义形式,并以此为基础设计分数阶全局滑模控制器,其统一定义为 ...
一种感应电机矢量控制转子电阻在线辨识方案
1
2013
... 为了实现对定子电阻的辨识,以下面的步骤完成对Elman神经网络的训练[23 ] . ...
Scheme for motor rotor resistance on-line identification in vector control of induction motor
1
2013
... 为了实现对定子电阻的辨识,以下面的步骤完成对Elman神经网络的训练[23 ] . ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}