

1 引言
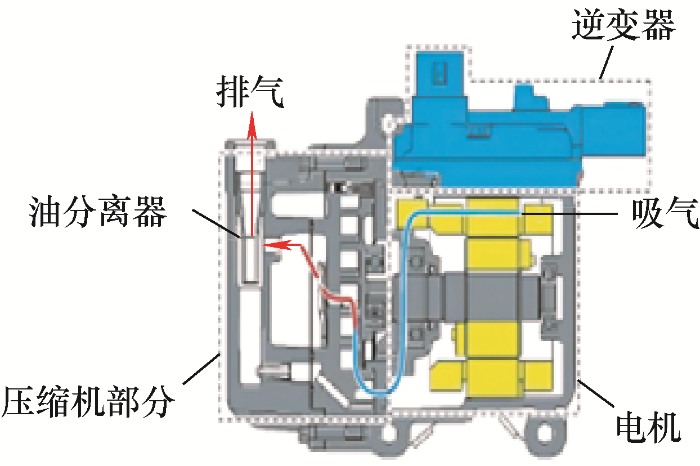
永磁同步电机具有功率密度大、损耗小及稳定性强等优点,被广泛应用于汽车空调压缩机的驱动[1⇓-3]。由于车载电子涡旋压缩机的结构特点,其旋转一周可以分为吸气和压缩两个过程[4]。吸气过程负载较轻,压缩过程负载较重,这种负载的周期性变化引起压缩机转速的周期性波动,压缩机转速波动会带来诸多问题,如噪声升高、振动增大等。噪声高会使使用者产生不良身体感受,振动大会增加系统损坏的风险,影响产品可靠性。低转速、大负载时,系统转速波动最为明显。为了提高使用舒适性和产品可靠性,在低速情况下,采用良好的控制策略来减小车载电子涡旋压缩机的转速波动至关重要。目前,对于压缩机转速波动的抑制,国内外研究已经取得了较多研究成果。文献[5]采用磁场定向控制的方法对压缩机转速波动进行抑制;文献[6]采用自适应修正重复控制方法对压缩机转速波动进行抑制;文献[7]采用传统滑模观测器观测电机转速,提取转速的基波分量,通过滤波器获得转矩补偿值,将补偿量反馈给控制系统对负载转矩进行补偿,从而对压缩机转速波动和转矩脉动进行抑制;文献[8]采用扩张状态观测器观测负载转矩变化,并将观测值前馈到电流环,从而减小转速波动;文献[9]利用周期扰动观测器观测负载变化并反馈补偿,从而降低转速误差;文献[10]提出一种边界层随速度自适应变化的滑模观测器,从而抑制了系统的抖振;文献[11]提出利用转速信息进一步观测负载转矩中的周期性脉动分量,并依据观测值进行相应的前馈补偿,从而抑制转速脉动。
目前,转矩补偿控制系统中广泛采用PI速度控制器和滑模观测器,针对PI速度控制器鲁棒性较差,无法实时适应负载各类扰动以及传统滑模观测器抖振影响系统控制性能的问题,本文提出一种自抗扰速度控制器与新型滑模观测器相结合的方法,并采用新控制函数负载转矩观测器进行负载观测,使车载电子涡旋压缩机在低速工况下稳定可靠运行。
2 压缩机结构及负载转矩观测器
2.1 车载电子涡旋压缩机结构
图1
2.2 新型负载转矩观测器
机械运动方程为
电磁转矩方程为
式中,ψf为永磁体磁链;J为转动惯量;Te、TL分别为电磁转矩和负载转矩;B为阻尼系数;ωm为机械角速度;iq为旋转坐标系下的q轴电流。
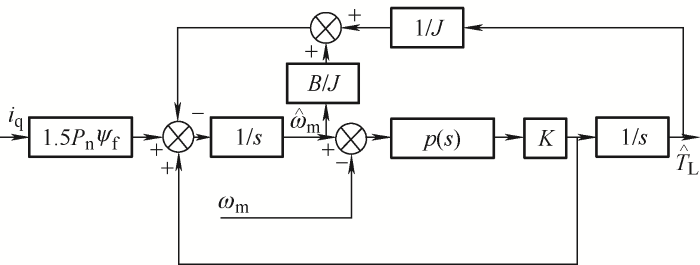
根据永磁同步电机的机械运动方程,以式(1)为基础,构建以机械角速度和负载转矩为观测量的负载转矩观测器数学模型如式(3)所示
式中,
负载转矩观测器的滑模面为
负载转矩观测器观测误差为
由式(3)可以构建负载转矩观测器,其结构如图2所示。
图2
最后将负载转矩观测器估计的负载转矩与比例系数相乘,进行前馈补偿。
3 低速转矩补偿控制策略
3.1 基于自抗扰控制的速度控制器
自抗扰控制(Active destabilization resistance control,ADRC)是由PID控制发展起来的,能够实时地估计控制系统的各类扰动[17],考虑到传统PI速度控制器对负载变化的自适应能力不足及鲁棒性较差,所以采用自抗扰控制技术设计速度控制器。自抗扰控制结构由跟踪微分器(Tracking differentiator,TD)、扩张状态观测器(Extended state observer,ESO)和非线性误差状态反馈(Nonlinear states error feedback,NLSEF)组成[18]。在车载电子涡旋压缩机控制系统中,需要整定的参数较多,在不影响系统控制效果的前提下,将起过渡作用的TD模块进行省略。在NLSEF模块中,fal函数会降低系统的控制精度,使用结构简单并效果相同的PI控制器,从而大大简化了模型。
扩张状态观测器是ADRC的关键,其是根据实际转速设计的,如式(6)所示
式中,
式中,e为误差信号;α为可调参数;δ为滤波因子;sgn为符号函数。
设计非线性状态误差反馈如式(8)所示
式中,ω为给定电机转速。
3.2 基于新型趋近律的滑模观测器
在车载电子涡旋压缩机内部安装位置传感器较为困难,所以需要采用无位置传感器控制方法。因为负载的特殊性,在压缩机旋转过程中需要考虑到负载呈周期性波动,所以采用稳定性较强的控制方法,本文所采用的滑模观测器(Sliding mode observer,SMO)对模型参数精度要求较低,并具有较高的稳定性[19]。
传统滑模观测器控制率是基于等速趋近律得到的[20],等速趋近律的表达式为
式中,K为滑模系数,且K>0。
滑模控制是系统按照已设定的趋近律,以一定速度趋近滑模面,并在滑模面两侧进行小幅高频抖振。当滑模趋近速度为固定值时,系统接近滑模面后,不能及时减速,并在滑模面左右两端高速运动,从而引起系统抖振。
为了提升控制系统的可靠性,将变参数增益与指数趋近律相结合,提出了新型趋近律,其具体表达式为
式中,K1、K2、ε为新型滑模增益;s为滑模面;α'、β'为指数系数。
该趋近律将趋近滑模面的速度与X建立联系,使系统自适应地控制趋近滑模面的速度。当处于距离平衡点较远的位置时,新型趋近律的整个指数项起作用,使得系统趋近平衡点的速度变大,系统可以在短时间内趋近平衡点;而在距离平衡点较近的位置时,
车载电子涡旋压缩机电流在α-β坐标系下的方程为
式中,iα、iβ、uα、uβ分别为α、β轴下的电流、电压;Eα、Eβ为扩展反电动势。
改进滑模观测器设计为
式中,
改进滑模观测器的控制率设计为
将式(12)和式(11)相减,当处于滑模面
由式(14)得到的信号是不连续的,需要过滤掉高频谐波来获得连续的信号。由于采用反正切函数法求解电角度估计值时,会导致误差放大,所以采用锁相环获取转子位置信息。
为证明选用新型趋近律的滑模观测器是稳定的,李雅普诺夫函数为
对V进行求导得
即
如果式(16)为负,则认为系统是稳定的,因此,X1<0,X2<0,X3<0是系统稳定的充分条件。X1恒小于零,即ε可以取任何大于零的数;X3恒小于零,即K2可以取任何大于零的数;使得X2<0的充分条件为
参数K1的取值范围为
根据以上分析,如果K1、K2、ε取值合适,则改进滑模观测器是稳定的。
4 仿真及试验结果分析
4.1 仿真分析
图3
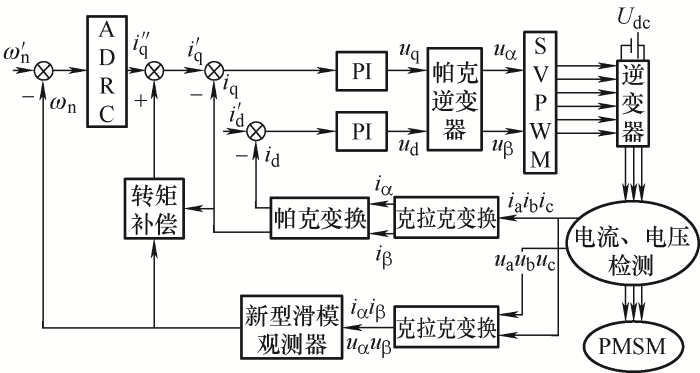
表1 永磁同步电机主要参数
| 参数 | 数值 |
|---|---|
| 定子电阻R/Ω | 0.479 |
| 极对数Pn | 4 |
| 电感Ls/mH | 2.4 |
| 转动惯量J/(kg·m2) | 0.000 8 |
| 永磁体磁链ψf/Wb | 0.175 |
| 额定转速N/(r/min) | 1 000 |
图4
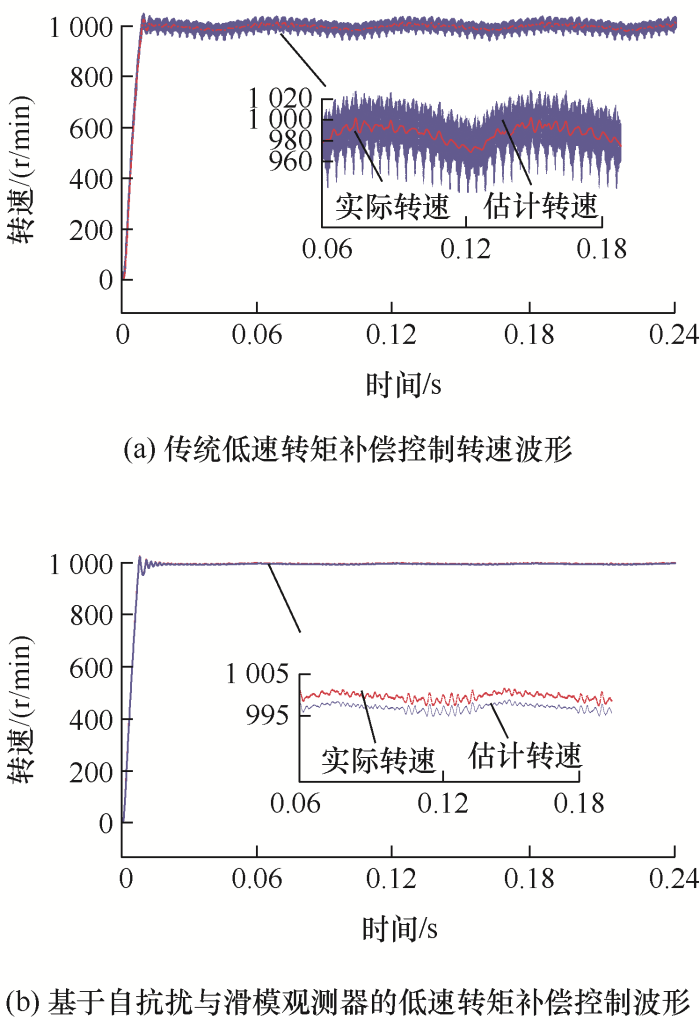
从图5的转速变化曲线可知,传统低速转矩补偿控制的实际转速波动范围为30 r/min,滑模观测器所估计的转速抖振明显。本文所提方法使实际转速波动范围降低为10 r/min,采用新型趋近律的滑模观测器所估计的转速抖振得到有效抑制。
图5
从图6的电磁转矩变化曲线可知,传统低速转矩补偿控制的电磁转矩脉动范围为5 N·m;本文所提方法使电磁转矩脉动范围降低为2 N·m,系统输出转矩能够准确地跟踪实际负载变化,电磁转矩脉动得到有效抑制。
图6
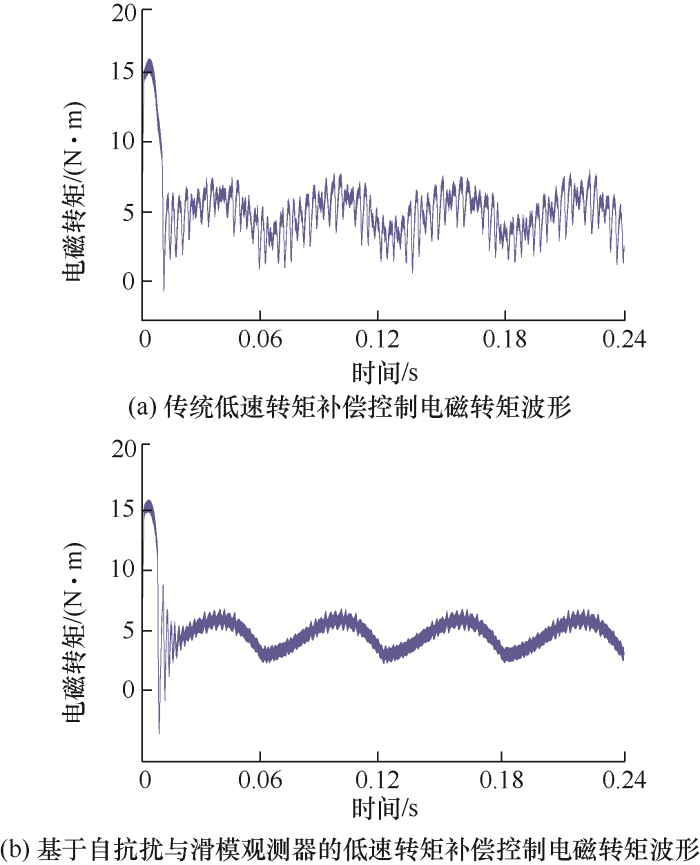
由以上对比可知,基于自抗扰与滑模观测器的低速转矩补偿控制方法能更好地抑制系统抖振和电磁转矩脉动,使实际转速波动范围减小。
4.2 试验结果分析
图7
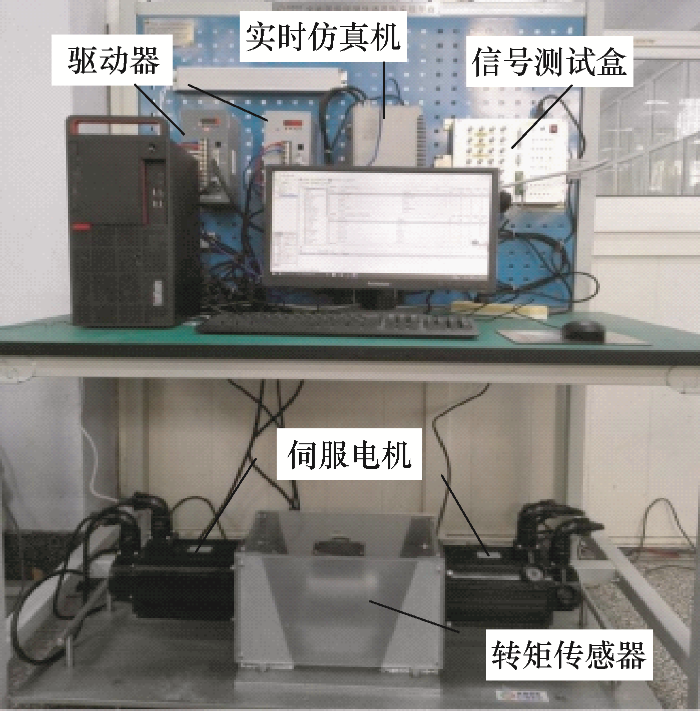
图8
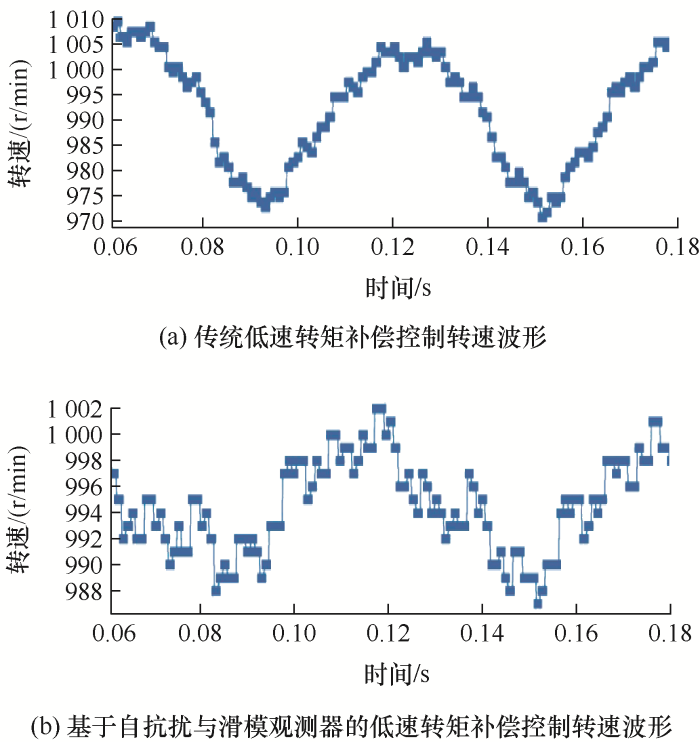
由图8可知,在转速为1 000 r/min的稳态状态下,传统低速转矩补偿控制的转速在970~1 010 r/min之间波动,波动范围为40 r/min,基于自抗扰与滑模观测器的低速转矩补偿控制的转速在986~1 002 r/min之间波动,波动范围为16 r/min。该控制方法使波动范围从4.0%降为1.6%,转速波动显著降低。
5 结论
针对车载电子涡旋压缩机在低速工况下转速波动较大的问题,提出一种基于自抗扰与滑模观测器的低速转矩补偿控制算法。该控制算法具有以下优点。
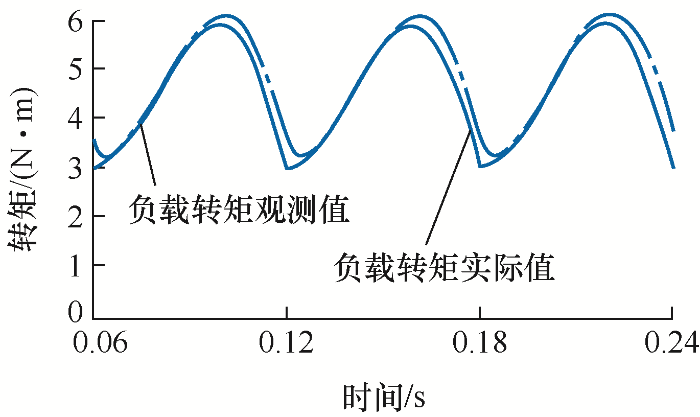
(1) 车载电子涡旋压缩机转矩补偿控制以机械运动方程为基础设计负载转矩观测器更加简单,并采用新控制函数进行负载转矩观测,观测结果较为准确。
(2) 采用自抗扰控制技术设计速度控制器,并结合采用新型趋近律的滑模观测器,与传统低速转矩补偿控制相比,转速波动范围显著降低,提高了车载电子涡旋压缩机控制系统的稳定性。
(3) 通过仿真及试验结果表明,基于自抗扰与滑模观测器的低速转矩补偿控制能使车载电子涡旋压缩机稳定可靠运行,验证了所提方法的正确性和可行性。
参考文献
永磁同步电机无位置传感器控制技术研究综述
[J].
Position sensorless control technology of permanent magnet synchronous motor:A review
[J].
IF结合改进滑模观测器的PMSM无传感器复合控制
[J].
Sensorless control for PMSM with combined IF improved sliding mode observer
[J].
永磁同步电机伺服系统速度环控制技术
[J].
Overview of speed loop control technology for permanent magnet synchronous motor servo system
[J].
采用永磁同步电机的单转子压缩机的减振研究
[J].
Research on vibration reduction of single-rotor compressor with permanent magnet synchronous motor
[J].
电动汽车空调压缩机永磁同步电机控制系统的设计
[J].
Design of permanent synchronous motor control system for electric vehicle air conditioning compressor
[J].
Speed fluctuation suppression for the inverter compressor based on the adaptive revised repetitive controller
[J].
DOI:10.3390/en13236342
URL
[本文引用: 1]

Repetitive operation is extensively present in the inverter compressor refrigeration field. Research illustrates that an approximate periodic load disturbance deteriorates its self-sensing and efficiency in a low frequency range. According to an internal model theorem, a repetitive controller can realize periodic signal tracking or suppression; however, ideal repetitive control (IRC) can not be directly employed in practical application owing to its excessive sensitivity to period-time uncertainties or aperiodic component, etc. In addition, the ratio between period delay to sampling time can not always maintain an integer which causes the resonant frequencies to deviate from the interested. Even if the ratio is a fixed integer, the auxiliary function for stabilization in a conventional repetitive controller can result in the steady state tracking error. In this paper, a revised repetitive controller with a novel Savitzky–Golay (S–G) filter is proposed, the S–G filter cascaded with a traditional delay element can approximate the delay element with any ratio. Aiming at a different operating condition, a second order generalized integrator (SOGI) based observer is employed to extract disturbance fundamental component, and Steiglitz–McBride based adaptive notch filter (SM-ANF) is adopted for frequency estimation. The proposed scheme varies the S–G filter according to variable fundamental frequency and maintains its resonant frequencies corresponding with the fundamental and harmonic disturbance. In the end, simulations and experiments are implemented and results illustrate that speed fluctuation can be effectively suppressed by the proposed method.
基于前馈补偿的压缩机负载转矩补偿方法
[J].
A method to compensate the load torque for compressor based on feed forward control
[J].
基于扩张状态观测器负载转矩补偿的永磁同步电机全速范围无位置传感器控制
[J].
Sensorless control of PMSM in all speed range based on extended state observer for load torque compensation
[J].
基于自适应周期扰动观测器的变频压缩机转速波动抑制
[J].
Speed fluctuation suppression based on adaptive periodic disturbance observer for inverter compressor
[J].
基于自适应滑模观测器的PMSM无位置传感器研究
[J].
PMSM sensorless control based on adaptive sliding mode observer
[J].
基于负载转矩观测的永磁同步电机抑制转速脉动控制方法
[J].
Speed ripple suppression control of pm motor based on load torque observation
[J].
电动汽车空调压缩机噪声测试及其声品质客观参量分析
[J].
Noise test and objective parameters analysis of sound quality for electric vehicle’s air conditioning compressors
[J].
新能源汽车空调电动涡旋压缩机技术的应用研究
[J].
Research on application of electric scroll compressor technology for new energy vehicle air condition
[J].
涡旋压缩机的虚拟建模与运动仿真
[J].
Virtual modeling and dynamic simulation of scroll compressor
[J].
模糊滑模控制和负载转矩补偿的异步电动机直接转矩控制
[J].
Induction motor dtc based on fuzzy sliding mode control with load torque compensation
[J].
基于降维负载转矩观测器的调速系统控制技术研究
[J].
Research on control technology of speed control system based on reduced dimensional load torque observer
[J].
基于自抗扰的永磁同步电机矢量控制系统
[J].
Active disturbance rejection vector control system for PMSMs
[J].
永磁同步电机调速系统非线性自抗扰控制器设计与参数整定
[J].
Nonlinear active disturbance rejection controller design and tuning for permanent magnet synchronous motor speed control system
[J].
扩展滑模观测器永磁同步电机无传感器矢量控制
[J].
Sensorless filed oriented control of permanent magnet synchronous motor based on extend sliding mode observer
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}