

1 引言
飞轮在卫星姿态控制系统中作为力矩执行机构,其性能的好坏决定了卫星的运行寿命和空间科学任务的成败。目前,在飞轮进行总装机之前,需要进行严格的多工艺测试,从而确保飞轮的质量稳定可靠。
该自动测试系统分别从对飞轮测试过程中硬件接口和软件兼容的通用性、精确性和自动校准三个方面进行设计,使用结果表明该自动测试系统运行稳定且测试精度和效率均能满足需求。
2 飞轮自动测试系统功能及框架
2.1 系统的自动测试功能需求分析
飞轮测试系统能够实现不同通信协议、不同类型硬件接口飞轮控制的稳定性测试和可靠性测试,该系统具有如下特点。
(1) 系统采用“一拖六”的设计结构模式,可实现6路飞轮控制板产品同时进行自定义的串行/并行测试。
(2) 测试系统给飞轮控制板产品提供的测试环境,功能上实现了高精度采集到产品的运行参数,通过算法分析、处理最终导出测试报表,进而可以直观地看到反作用飞轮的性能。
(3) 该套测试系统具备自动校准功能,极大地降低了计量人员定期手动校准的工作量,提高了整个系统的自动化程度。
2.2 自动测试系统结构框架
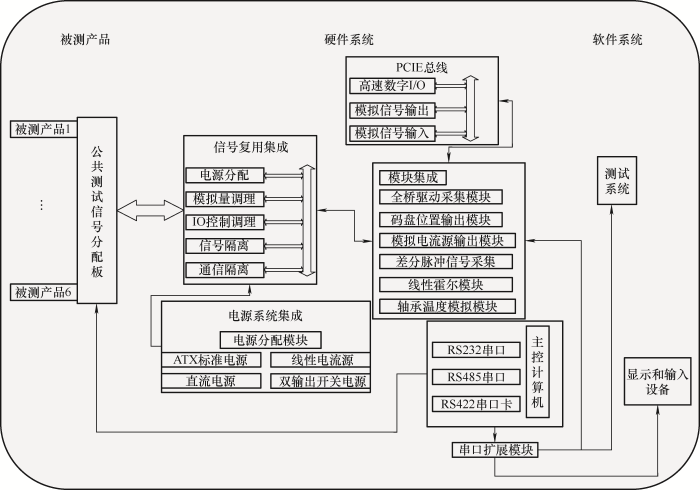
系统框架结构如图1所示。系统的框架结构由软件系统、硬件系统和被测产品三部分组成。软件系统内部涉及了完成各项功能的测试流程模式等。硬件系统部分主要由① 总线部分(Peripheral component interconnect express,PCIE),② 模块集成,③ 模块复用集成,④ 电源系统集成,⑤ 主控计算机和⑥ 公共测试信号分配板组成。其中①主要负责产生控制的IO信号,模拟信号的输入和输出功能;②涉及采集高频隔离电压信号的全桥驱动采集模块,控制飞轮产品位置信号的码盘位置输出模块,模拟飞轮运行电流的模拟电流输出模块,采集差分转速信号的差分脉冲信号采集模块,产生连续控制信号的线性霍尔信号模块,模拟飞轮轴承温度的轴承温度模拟模块;③涉及分配整个系统电源分配模块,系统中采集到模拟信号的模拟量调节电路,模块使能控制的IO控制调理,另外涉及到信号隔离和通信隔离部分;④涉及四种输出的电源类型,以及每种电源分配的模块;⑤主要涉及几种通信类型的汇总信号发生器使用到的RS232类型的通信;⑥涉及整个系统的公共测试信号的一个分配处理板。自动测试系统以PCIE总线仪器为核心,串口扩展模块为数据交换的枢纽,以主控计算机为基础,由PCIE总线模块提供给被测产品测所需的信号和控制资源[3],对各个被测产品的专属信号进行调理并转接到公共测试信号分配板,然后通过与公共测试信号分配板的接口连接,输送到被测产品(飞轮控制板)。主控计算机通过自动测试软件[4]系统控制测试设备的仪器资源和测试程序来执行。
图1
3 飞轮测试系统硬件设计
为实现自动测试系统对6路飞轮控制板的并行测试和可自定义测试内容的串行测试功能,该自动测试系统在硬件系统设计方面采用“一拖六”的方案。自动测试系统硬件结构的硬件系统主要由工控计算机,信号复用集成部分,公共测试信号分配板集成的输入、输出信号部分,电源系统集成以及定制的测试线缆组成。工控计算机实现控制指令的发出,数据资源的存储,并实现对测试数据的处理、显示功能。在模块集成设计方面,全桥驱动采集模块是针对高频宽电压隔离信号设计的模块,可以实现高精度采集,快速响应,实时反映飞轮的驱动控制状态;码盘位置输出模块具有多路隔离输出,精确地发送位置信号并提供给被测产品;模拟电机电流输出模块不仅要提供多路输出,还要具备连续定点输出电流值,从而可以模拟飞轮的工作情况;差分脉冲信号采集信号具备采集飞轮产生的差分信号的功能,并且可以高精度解析对应的脉冲信号,同时具备校准信号输出的功能;线性霍尔模块具备连续的线性频率输出的功能,对信号的频率和幅值误差要求较高;轴承温度模拟模块通过发送5 K、10 K、20 K等高精度的电阻值,从而实现模拟飞轮轴承温度的作用。通过总线PCIE-1816H产生高速的数字IO信号,控制模块集成部分模块的开通和关断,在信号复用集成部分与模块集成部分,通过总线的模式进行信号的采集与指令的发送;整个系统的电源由电源系统的集成提供,线性直流电源(0~50 V)为被测产品提供一次电源,开关电源+24 V是为模拟电机电流源设备提供一次电源,单独使用一个电源可以实现模拟电机电流源的回线与供电地线之间的隔离,ATX标准电源包含了+12 V、+5 V、+3.3 V等几种电源,主要是为设计的模块提供一次供电电源;可编程电流源为系统提供模拟负载运行的电流。本文重点对测试系统的隔离地网设计和基于高频电压隔离信号采集单元的设计进行介绍。
3.1 测试系统的隔离地网设计
图2
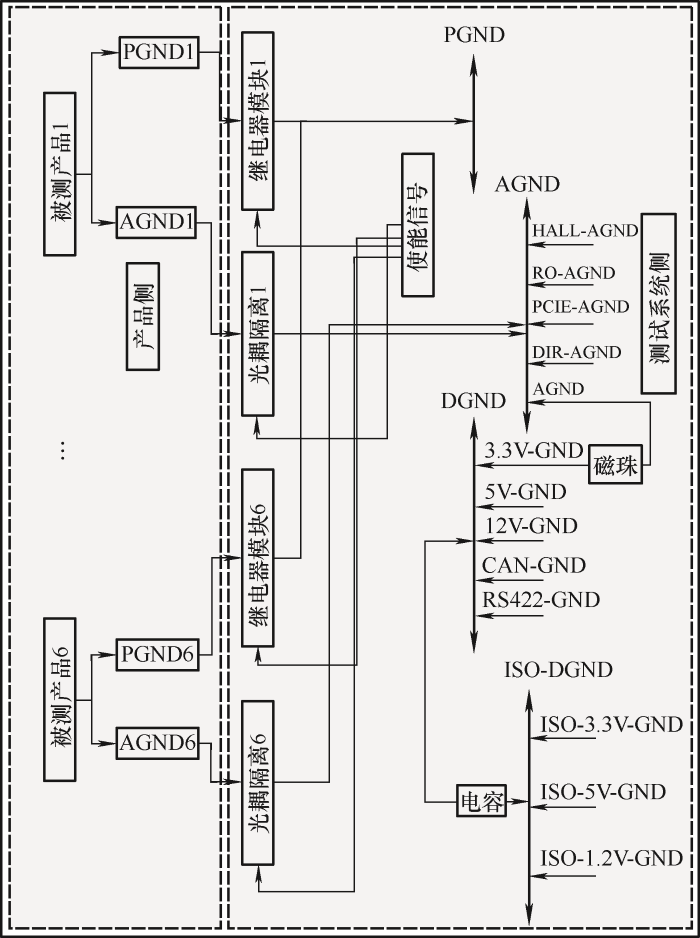
测试系统隔离地网的设计原理如下:在测试系统侧,分成了PGND、AGND、Digital ground (DGND)、Isolation-digital ground(ISO-DGND)几部分,依据每种信号地的特点依次设计对应的地网络。在测试系统侧,AGND和DGND之间采用0 Ω的磁珠进行隔离,在DGND和IOS-DGND之间采用电容起到隔离滤波的作用。在测试系统与被测产品之间,要实现PGND和AGND两路地信号分配和隔离,首先针对每路产品的PGND和AGND分别采用继电器模块和光耦模块,实现每路的切换,控制信号来自于测试系统侧的使能信号端;同时为了实现被测产品之间的相互隔离,采用了继电器切换的设计模式。每路被测产品均采用一路隔离电源和IO控制信号,实现每路输出信号在控制端和供电端均达到隔离。
3.2 多路高频隔离电压信号采集
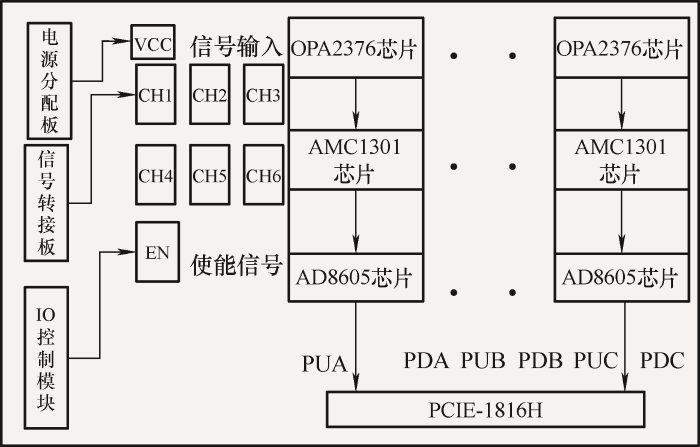
多路高频隔离电压采集模块实现了在不同模式下的采集功能。当采集信号为全桥电机电路驱动[7]测试模式时,采集的是上下桥臂的6路驱动信号PUA、PUB、PUC、PDA、PDB、PDC;当采集信号为半桥电机驱动电路测试时,采集的是下桥臂的3路驱动信号PDA、PDB、PDC。为满足不同测试模式下的信号测试要求,设计出一套专用的多路高频方波信号采集单元。采集信号的参数如下:频率f≤20 kHz,幅值42 V,幅值误差σ≤5%。多路高频采集单元[8]的结构如图3所示。采集电路模块设计结构是由一块底板和六块即插即用的子板组成。采用底板与子板配合的方式,方便前期调试和后期维修。子板主要由隔离运放AMC1301芯片、输入OPA2376芯片和输出AD8605芯片组成,实现对信号的取样、降压和隔离输出功能。底板主要包括几部分:供电的电源电路、信号的输入电路,每路信号输出片选信号EN0-EN6的转接电路,实现对子板供电、片选信号以及输出信号的转接功能。下面以实际测试案例来说明其工作原理。如图6所示,通过系统内部设计的排线,把6块被测产品的信号接在对应的插头上(第1路对应CH1,剩余5路依次对应CH2~CH6);底板上的EN信号,通过系统内部的排线接在IO控制模块上;每个子板对应一路信号的输出,按照端子分配表,输出的信号线连接在PCIE-1816H的数据采集卡上。依据自动控制测试系统的控制逻辑,对IO控制模块发出指令,则在人机界面软件读取到对应的信号波形;依据下式解析还原对应的驱动信号,并在界面上显示对应的波形图。
图3
4 自动测试软件开发
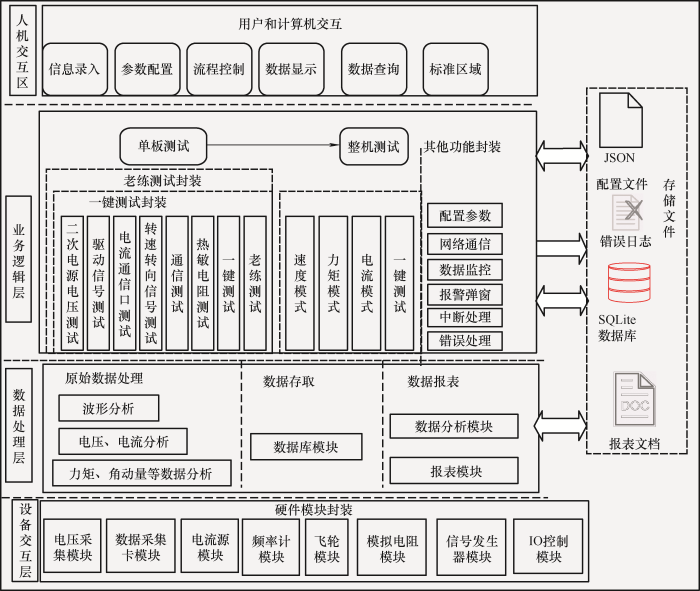
自动测试系统软件是在Windows10操作系统下采用QT集成开发平台开发的,数据库管理采用MySQL系统,根据测试需求开发相应的测试系统。人机交互区[9]上列出了测试信息录入、参数配置、流程控制、数据显示、数据查询、校准区域等,可根据实际的测试需求进行选择。最后把测试结果以报表、数值和波形等方式进行显示。测试系统软件采用模块化分层设计思路,为用户提供一个集成化的测试环境,各个程序模块在系统管理程序的管理下实现相互调用和连接,测试系统中的主要程序结构为以下几层:设备交互层包含了所用硬件模块的封装,数据处理层包含了原始数据处理、数据存取、报表的导出,业务逻辑层包含了单板测试的单项功能测试到整机测试3个模式的封装,同时兼顾了一些其他功能的封装,最上层为人机交互层,包含了从信息录入到数据查询,最后为校准区域。自动测试系统的分层结构如图4所示。
图4
4.1 自动测试系统过程图
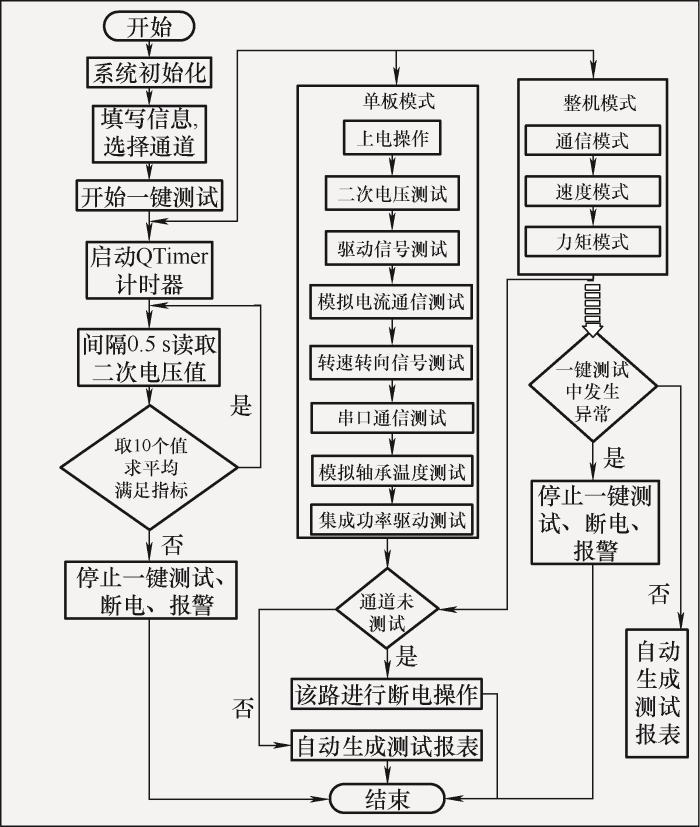
系统测试过程如图5所示。为了实现在飞轮测试方面的通用化,设计的软件既要兼容飞轮单板测试,又要兼容整机测试模式。依据被测的产品,设计的软件实现了协议的自动匹配。信号的采集方面兼容了信号通用的采集、处理、控制硬件模块设计等。软件设计初始化和一键测试的选择模式,具有了串行和并行的测试流程,可以实现飞轮单板和飞轮整机模式的测试任务。
图5
4.2 系统的自动校准功能
在飞轮的测试系统中,对测试系统进行计量、标定是一项严格且周期性进行的工作。由于目前被测产品种类繁多,且每一种飞轮产品都需要专门开发一套测试设备,导致开发成本提高,同时也增加测试计量人员的工作量,降低了工作效率。本测试系统中不仅具有通用性的测试功能,同时也具备自动校准[10]的功能,极大地降低了计量人员的工作量,同时提高了整个系统的准确性。
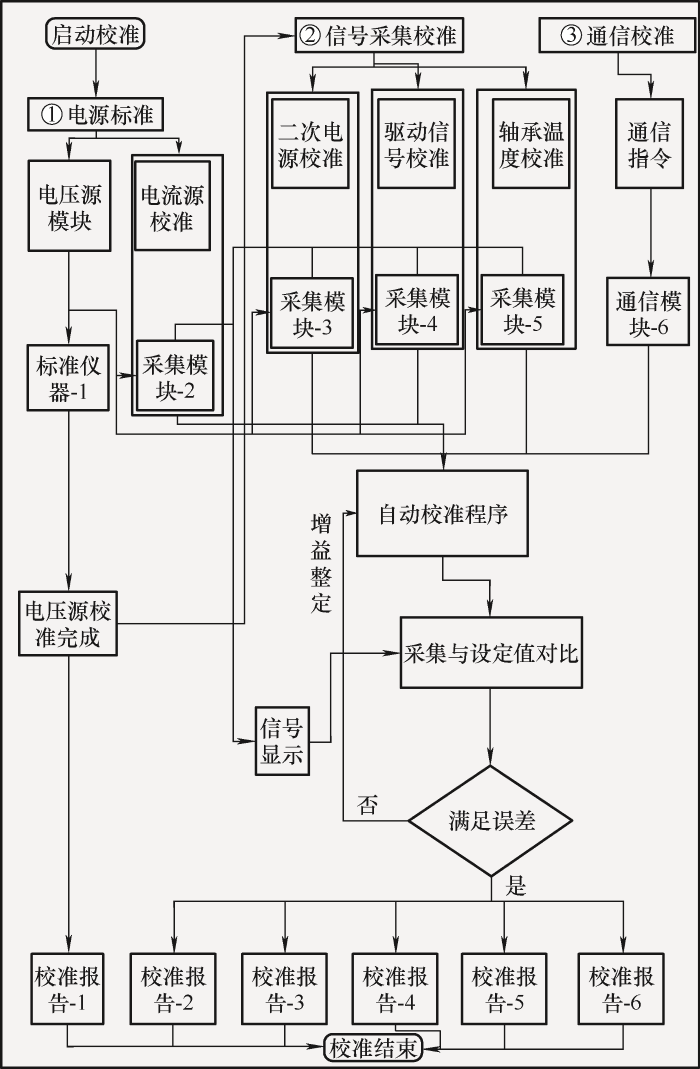
自动校准功能[11]的结构如图6所示(σ统称误差)。该自动校准结构可分为三个部分:① 电源校准、② 信号采集校准[12]和③ 通信校准。① 部分分为电压源模块校准和电流源校准[13],在电压源模块校准的部分,使用的是外部校准仪器-1,对电压源的电压精度和灵敏度进行校准,校准完成后,形成校准合格报告,同时已校准过的电压源模块作为②部分信号采集的标准信号源使用。②部分包含了二次电源校准、驱动信号校准和轴承温度校准三部分,PC通过计算机的串口,设定电压源的电压值,作为采集模块-2、采集模块-3、采集模块-4、采集模块-5的信号输入端,模块的信号输入到校准程序中,通过程序的解析值,与标准的信号源显示值进行对比。如果判断出两者之间满足误差要求,则校准结束;如果误差过大,则进行增益整定,反复校准直至合格为止,最后导出校准报告。③部分为通信校准,发送校准指令至通信模块-6,判断发送和接收指令的信息与次数一致,即校准通过。自动校准功能大大缩短了校准时间,提高了效率。
图6
5 试验和应用分析
为了验证系统在实际飞轮测试使用中的性能,分别从通用性、精确性、定期校准的便捷方面进行验证。
表1 通用化测试功能
| 名称 | 单板模式 | 整机模式 | 结果评定 |
|---|---|---|---|
| 性能 通信兼容 转接模块 | 一、二次电源测试 | 速度模式 | 满足 |
| 驱动信号采集 | 力矩模式 | 满足 | |
| 转速转差采集 | 通信模式 | 满足 | |
| 模拟轴承温度 | 满足 | ||
| 集成功率驱动 | 满足 | ||
| RS422/485 | 满足 | ||
| CAN | 满足 | ||
| 兼容多种接插件 | 满足 |
(2) 定期校准的便捷性。在飞轮测试过程中的自动校准功能,如表2所示,从如下几个方面进行论证,校准每一个通道实际需要的时间,统计每个通道校准完成时的θ(平均误差)值,θ值反映的是校准后的测量值与交付时标准值之间的偏离关系度。常规飞轮测试系统的校准流程如下:准备校准信号源,打印对应的校准信号记录表格,校准流程图和电气接线节点图纸;依据系统校准流程图和电气接线图,逐个接好每个需要校准信号的校准回路;软件操作人员操作,记录人员进行记录,两个人员对每个通道所有信号校准完毕至少需要30 min且整个校准数据的平均误差波动大于5%。对表2自动校准数据分析可得,校准的时间大大缩短,统计的θ值降低,准确度提高。测试系统的6个通道所用时间有所偏差,原因在于自动校准中校准信号发送与接收的次数有所差异。结果验证了整个系统硬件设计的校准需要用到的信号源和回路的稳定性[17],同时也验证了校准程序操作流程的可靠性和稳定性,使得计量人员在对测试系统进行年度校准时[18],操作更加便捷、测量更加准确。
6 结论
参考文献
飞轮通用测试软件平台的设计与实现
[J].
Design and implementation of flywheel general test software platform
[J].
飞轮微振动的组合隔振装置设计及实验研究
[J].
Design and experimental study of combined vibration isolation device for micro-vibration of flywheel
[J].
小电阻接地系统高灵敏性及相关保护研究
[J].
Research on high sensitivity and related protection of small resistance grounding system
[J].
小电阻接地系统弧光接地故障建模与特征计算方法
[J].
Arc ground fault modeling and characteristic calculation method of small resistance grounding system
[J].
多通道温湿度变送器模拟量信号采集和转换装置的研制
[J].
Development of analog signal acquisition and conversion device for multi-channel temperature and humidity transmitter
[J].
面向用户感性需求的人机交互设计方案评价方法
[J].
DOI:10.12341/jssms22275
[本文引用: 1]

针对人机交互产品设计方案感性评价问题,提出一种面向用户感性需求的犹豫模糊CRITIC-Taguchi评价方法.该方法首先在感性工学框架下,用犹豫模糊集(HFS)表征感性评价信息,以充分保留差异的用户感性认知与偏好;其次,鉴于感性评价行为受目标、底线、现状等多参照点影响的特点,在犹豫模糊背景下提出了一种依据三参照点的犹豫模糊Taguchi分段质量损失函数.同时,考虑到感性指标间的相关性,将体现指标间相互联系的CRITIC客观权重确定法推广至犹豫模糊背景,并继而建立一套犹豫模糊CRITIC-Taguchi评价模型.最后,以智能汽车中控界面设计方案优选为例,对该评价模型进行了实施、验证及对比分析,结果表明该模型具有较好的有效性和适用性.
Evaluation method of human-computer interaction design scheme oriented to users’ perceptual needs
[J].
DOI:10.12341/jssms22275
[本文引用: 1]
In this paper, we propose a Hesitant Fuzzy CRITIC-Taguchi evaluation method for user kansei needs in response to the problem of kansei evaluation of humancomputer interaction product design solutions. The method firstly characterizes kansei evaluation information with Hesitant Fuzzy Sets (HFS) in the framework of Kansei engineering to fully retain the differential user kansei cognition and preference; secondly, in view of the fact that kansei evaluation behavior is influenced by multiple reference points such as target, bottom line and status quo, a hesitant fuzzy Taguchi segmental quality loss function based on three reference points is proposed in the context of hesitation fuzzy. Meanwhile, considering the correlation among kansei indicators, the CRITIC objective weight determination method, which reflects the interconnection among indicators, is extended to the hesitation fuzzy context, and a set of hesitant fuzzy CRITIC-Taguchi evaluation model is subsequently established. Finally, the evaluation model is implemented, verified and comparatively analyzed with the example of intelligent vehicle central control interface design scheme preference, and the results show that the model has good validity and applicability.
基于恒压激励的伺服式拾振器自校准技术研究
[J].
Research on self-calibration technology of servo vibration pickup based on constant voltage excitation
[J].
基于自校准技术的ATS溯源性及整体计量技术研究
[J].
Research on ATS traceability and overall metrology technology based on self-calibration technology
[J].
T/R组件电老练测试系统设计
[J].
Design of electrical aging test system for T/R components
[J].
PCI Express转接技术在模块化笔记本中的应用研究
[J].
Research on the application of PCI Express adapter technology in modular notebooks
[J].
工控系统模拟输入模块转换误差分析及修正
[J].
Analysis and correction of conversion error of analog input module of industrial control system
[J].
三轴磁通门传感器温漂误差分析及其校正方法
[J].
Analysis and correction method of temperature drift error of three-axis fluxgate sensor
[J].
一种示波器通道分时复用系统的设计与实现
[J].
Design and realization of an oscilloscope channel time-division multiplexing system
[J].
采集控制多线程一体化的集成式FAIMS主控系统设计与实现
[J].
Design and implementation of integrated FIMS master control system with multi-thread integration of acquisition and control
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}