

1 引言
2020年,我国明确提出“双碳”目标,大规模开发可再生能源,不仅是“双碳”目标实现的重要一环,也是保障我国能源供应的重要手段。近年来,光伏发电以清洁环保、功率可扩展性强、操作和维护简单等优势[1]得到迅速发展。光伏电池因环境不同,最大功率点(Maximum power point,MPP)会有所差异,而且光伏阵列在均匀光照条件(Uniform irradiance condition, UIC)下其输出特性与单个太阳能电池相似,但在部分阴影条件(Partially shaded condition,PSC)下时,因阵列中模块所受光照不同,其输出特性不再与单个电池呈简单的倍数关系[2],因而会影响光伏系统对太阳能的利用效率。
一些学者为了使传统MPPT方法在PSC下仍能搜寻到MPP,对传统的算法进行相应改进,使之能够准确跟踪PSC下的GP点。文献[13]提出了一种结合INC法和粒子群优化(Particle swarm optimization, PSO)的混合算法,PSO用于快速定位最大功率点的邻域,增量电导法则对该邻域进行二次搜索,以准确地找到最优解。文献[14]通过使用线性方程计算不同峰值间隔的峰值电压,并获得相应的峰值功率,通过比较可以精确地跟踪到GP。文献[15]利用光伏阵列输出电流单调的特性,在进行GP追踪时,用开路电压和短路电流不断刷新电压下限和电流下限,减小了算法的扫描范围和跟踪时间。文献[16]通过分析得出光伏阵列P-U曲线的第k个峰值点约在0.8kUoc(Uoc为光伏电池的开路电压)处,再用爬山法逐个寻找峰值点,最后通过比较得到GP。文献[17]提出对参数进行优化的算法,先利用环境参数计算出最优电流,通过追踪最优电流,实现对GP的跟踪。文献[18]运用光伏阵列在PSC条件下,峰值点与Uoc和Isc间的比例关系以及等功率曲线来跟踪GP。文献[19]深入分析了光伏阵列的各个特性,得出I-U曲线中恒流源区域的拐点约在0.7nUoc (其中n为受同一种光照的模块数)处的特点,运用此特点追踪GP。
评价一个MPPT算法优劣的标准,主要包括跟踪效率、全局最大功率点跟踪能力、对系统参数的依赖性以及跟踪速度(收敛时间)[20]。上述智能算法大都是为局部阴影下的光伏阵列而设计的,在均匀光照条件下的跟踪性能一般。基于可变步长的INC法,本文提出一种可以实现GP跟踪的算法。该方法不仅可以在UIC条件下,当光照发生变化时迅速追踪到最大功率点,还可以在光伏阵列处于PSC下时,仍能准确地跟踪到GP。在确定GP点的大致位置后,可调节变换器的占空比,使系统运行在GP点左右。
2 光伏系统
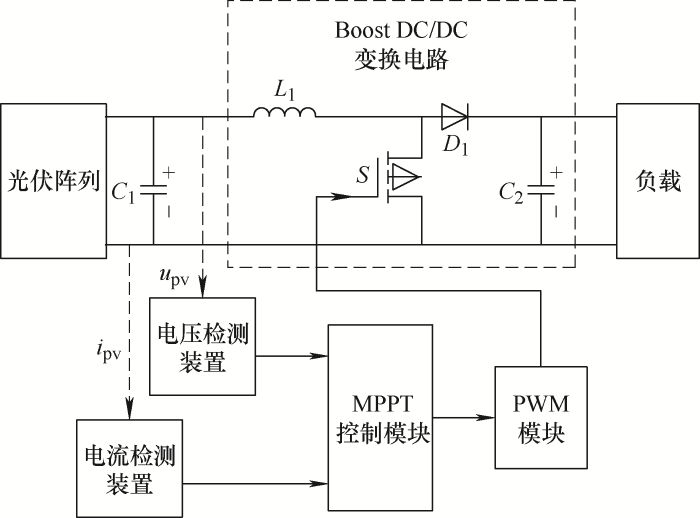
光伏系统的结构如图1所示,主要由光伏阵列、检测装置、DC-DC变换器、MPPT控制模块、PWM模块和负载(阻值为R)构成。在众多DC-DC变换器中,boost变换器因其较高的电压增益和较为简便的构造,在光伏系统中经常使用。当它在连续电流方式下工作时,其输入输出之间的关系如下
式中,D为变换器的占空比。
图1
将光伏系统等效为如图2所示的简化电路,其中Req为阵列的等效内阻,其值与环境有关:R'为负载R归算到光伏阵列侧的电阻,其值如式(3)所示。由式(3)可知当D越大时,负载电压越小。
图2
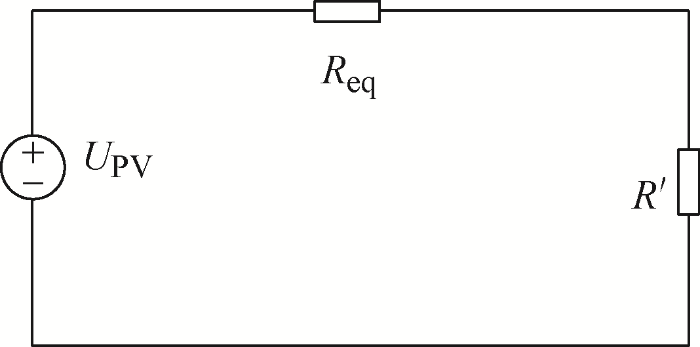
由图2可知负载的功率P为
对功率P求关于R'的导数可得
由式(5)可知,当R'=Req时,此时负载的功率最大,即可调整D的值让R'的值等于Req的值,使光伏阵列工作在MPP处。
2.1 单个光伏电池输出特性
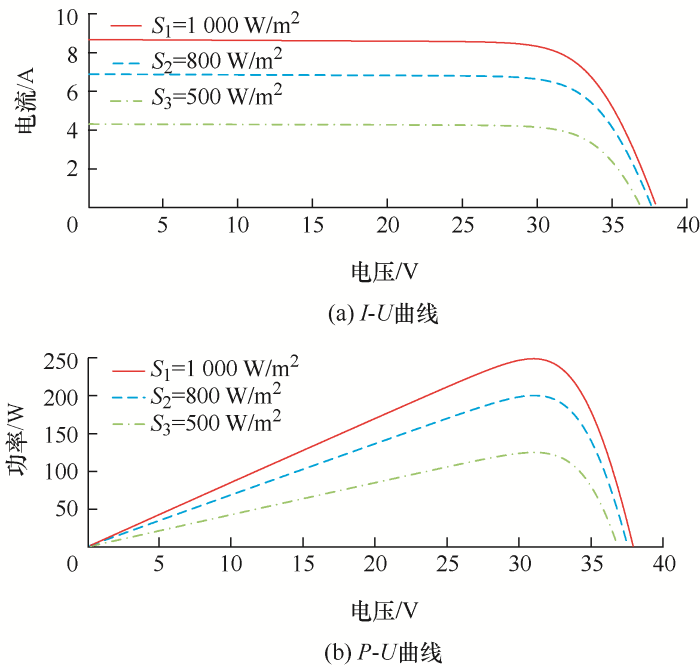
文献[21]中给出了从数学上描述光伏电池I-U特性的基本方程,如式(6)所示。通过采用控制变量法,分析环境因素与光伏电池特性的关系。
图3
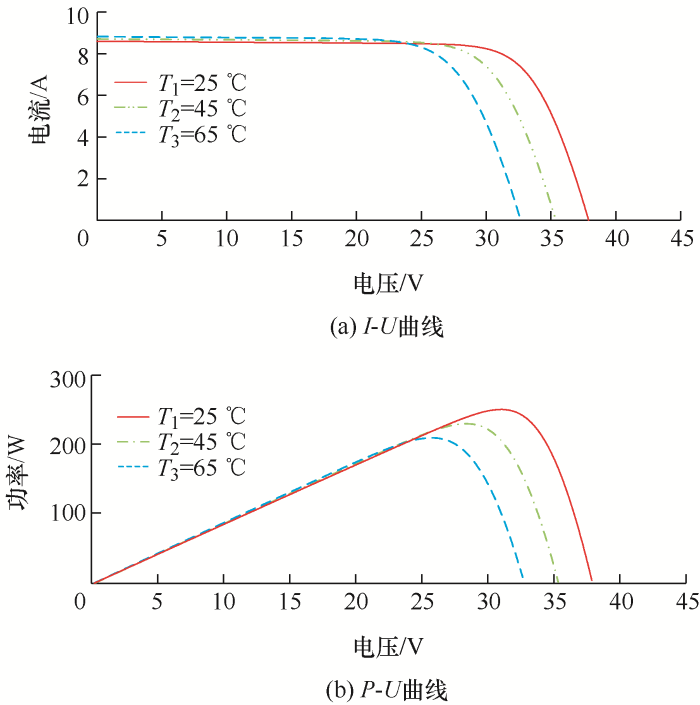
图4
2.2 PSC下光伏阵列输出特性
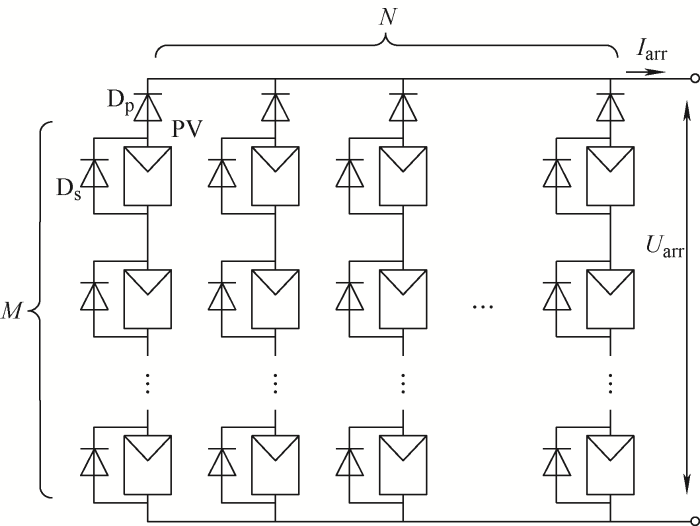
光伏阵列是光伏电池进行一系列的串并联后形成的,其结构如图5所示。其中N表示有N串光伏电池并联,M表示每串有M个光伏电池。当光伏阵列在PSC下时会出现“热区效应”,此时需要二极管Ds将存在“热区效应”的光伏电池短路。在有局部阴影时,各并联支路可能会发生电能倒送,需要在并联支路上串联二极管Dp。在理想情况下,对于M× N个光伏电池构成的阵列,其输出电流和电压为
式中,U、I分别为单个模块的输出电压、电流。
图5
在PSC条件下时,阵列中的光伏电池会受到不同的光照,其功率曲线会有多个峰值。当光伏阵列中有n种光照时,其曲线则会有n个峰值点。若使用传统MPPT方法寻找GP,只会在某个局部峰值点无法跳出,系统无法运行在MPP处,造成光能的浪费。
3 全局最大功率点跟踪算法
3.1 变步长电导增量法
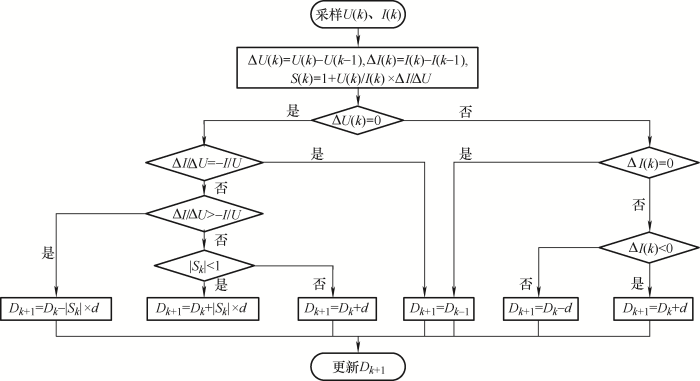
传统的INC法首先在光伏电池的P-U曲线中对功率求导,然后根据求导的结果调整步长,无法找到合适的步长以满足系统运行的要求。文献[3]提出一种步长调节系数用于INC法,当光照强度发生剧烈变化时,此调节系数能以较快的速度响应。步长调节系数为S(k)的绝对值,其中S(k)为
|S(k)|的曲线如图6所示,在恒流源区域内近似为1,在MPP附近时会迅速趋近于0,则占空比的更新关系为
式中,d为扰动定步长。
图6
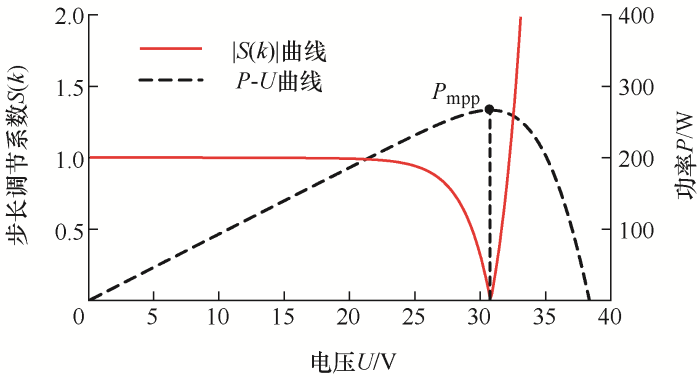
由于在|S(k)|曲线的右侧其值会大于1,为保证算法的收敛性,应规定当|S(k)|>1时,|S(k)|=1。算法在考虑上述因素后,流程图如图7所示。
图7
变步长INC法只适用于单峰值的光伏阵列,不能在多峰值中应用,在多峰值的光伏阵列中若用全电压范围内扫描的方式来确定GP,会降低整个系统的效率,不能满足实际要求,因此需要一种在PSC下仍精确、快速的MPPT算法。
为了实现对GP点的跟踪,通过对第3.1节中可变步长INC法进行改进,提出了一种算法。该算法主要包括算法主体、结束条件和重启条件三个部分,算法主体是搜寻GP,它包含4个步骤,通过对这4个步骤的循环执行,就可跟踪到GP。下文将具体讲述该算法的三个部分。
3.2 算法主体
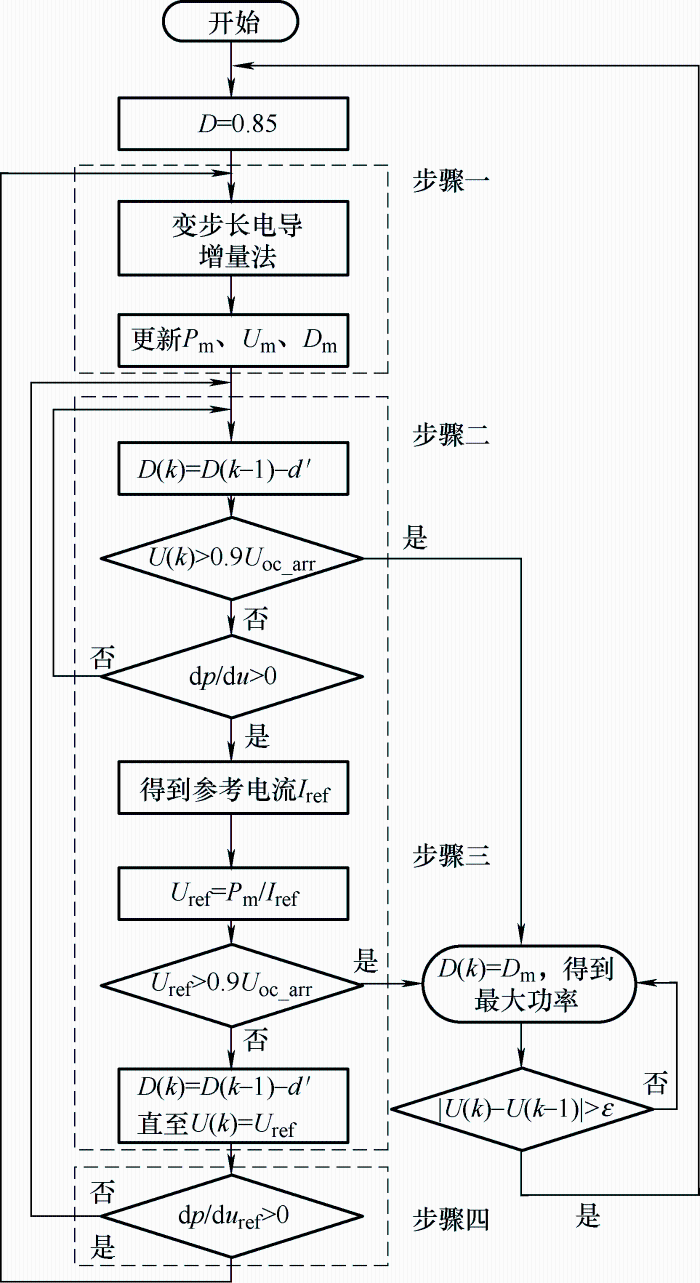
由文献[19]可知,单个光伏电池的功率峰值点处电压大于0.7倍的开路电压,而所提算法是从低压区向高压区进行扫描,为避免低压区峰值的遗漏并加快搜索速度,在算法初始化时,可将系统工作的占空比设为0.85。所提算法的具体步骤如下所示。
步骤一:通过变步长INC法搜寻到局部最大功率点,记录此功率点的功率、电压和占空比,并将其与所记录的最大功率Pm相比较,若比Pm大,则此功率点的功率、电压和占空比分别为新的Pm、Um和Dm;若比记录的Pm小,则不变。
步骤二:继续增大电压,直到找到P-U曲线上的一个下凹点(此点左侧的dp/du<0,右侧的dp/du>0),当dp/du首次大于0时,可近似认为此点为下凹点,记录此点的电流为Iref。
步骤三:用步骤一所得的Pm除以步骤二所得的Iref,可以得到一个新的参考电压Uref。此处为加快跟踪速度,会使用较大的扰动步长追踪Uref。
步骤四:判断P-U曲线在Uref处功率的导数的正负,当dp/duref >0,则重新执行步骤一,寻找下一个局部峰值点;当dp/duref <0,则重新执行步骤二,寻找下一个下凹点。
3.3 结束和重启条件
一个完整的GP跟踪算法,不仅要能够找到MPP,还要能够顺利结束算法的搜索和重新启动算法。
3.3.1 结束条件
由式(7)的不等式可知光伏阵列的MPP处电压不会超过0.9Uoc_arr(Uoc_arr为标准状况下的开路电压)。因此,可通过判断电压是否超过0.9Uoc_arr,来决定是否结束算法。为节省搜索时间,有两种途径可以结束算法执行,一种是在整个算法搜寻过程中,将光伏阵列的输出电压与0.9Uoc_arr比较,一旦大于0.9Uoc_arr就结束算法;另一种是判断算法步骤三所得电压Uref是否大于0.9Uoc_arr,若比0.9Uoc_arr大,也应结束算法。
3.3.2 重启条件
本算法是通过改变占空比来调整系统的功率。当找到GP点时,系统的占空比就会工作在GP点所对应的Dm。当外界环境变动时,光伏阵列的特性也会变化,若系统占空比仍是Dm,阵列的输出电压则会上升或下降。可利用这一特性作为算法重启的条件,即当系统占空比为Dm时,若出现式(12)的情况,则系统应当重启算法。
式中,ε为判断阈值。
图8是所提算法的完整流程图。其中,Pm为已搜索到的最大功率,Um和Dm是其对应的电压和占空比。初始化时,将算法的占空比设为0.85,流程图中的d'为算法设定的扰动定步长(其中d<d')。
图8
3.4 算法实际操作
下面以三个光伏电池串联的光伏阵列为例,对所提算法的实际操作进行详细的论述。
假定三个光伏电池各自受到的光照都不相同,由第2.2节可知,此时的功率曲线会出现三个局部峰值点,设三个峰值点分别为M1、M2和M3。图9是所提算法跟踪的大致过程。
图9
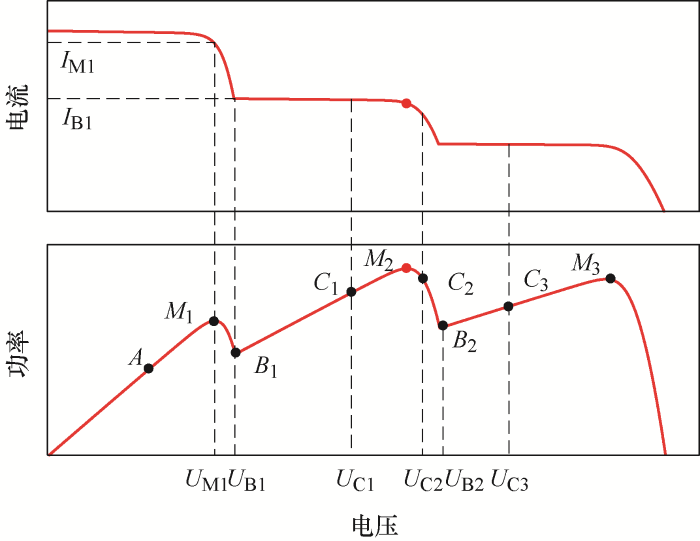
算法初始化后,系统先从占空比0.85处(即A点)开始执行,经过步骤一的变步长INC法,算法追踪到局部峰值点M1点,记录M1点的功率PM1和占空比DM1,此时全局最大功率Pm=PM1。
接着,执行步骤二,逐渐增加电压,当电压增加到与图9中B1点电压相同时,刚好符合dp/du>0,此时令Iref=IB1。
然后执行步骤三,用功率Pm除以电流IB1,得到参考电压Uref。逐渐增大电压,直至追踪至参考电压Uref。
最后,步骤四是根据P-U曲线在Uref处功率的导数来决定接下来是执行步骤一或步骤二。但参考电压Uref的位置有三种可能性,分别如图9所示的C1、C2和C3。
(1) 当Uref在C1点时,由于dp/du>0,说明在C1点后的功率仍会增加,可能会出现大于Pm的功率,所以算法从C1点继续执行步骤一,利用变步长INC法寻找到局部最大功率点M2,比较M2点功率PM2与Pm的大小,若PM2>Pm,则令Pm=PM2,否则Pm不变。之后再通过步骤二寻找另一个下凹点B2。
(2) 当Uref在C2点时,因为I-U曲线是单调递减的曲线,所以在UB1和UC2的区间内,IB1的电流值最大,而Pm=IB1•UC2,从中可知在UB1和UC2区间内的功率都小于Pm。由于局部最大功率点M2处于此区间内,所以可以跳过对M2的搜索,直接执行步骤二寻找另一个下凹点B2。由C2点的位置可知,此过程只有当dp/du小于0时才进行。
(3) 当Uref在C3点时,点M2和点B2都在UB1和UC3区间内,由(1)和(2)可知,可以跳过对点M2和点B2的搜索,直接从C3开始搜寻局部最大功率点M3。
通过对所提算法中四个步骤的循环执行,不断更新搜索到的最大功率,直至阵列的输出电压大于0.9Uoc_arr或Uref大于0.9Uoc_arr,才终止算法执行。将光伏阵列的占空比设为算法执行过程中保存的Dm,即可使光伏阵列运行在GP点左右。
4 仿真分析
表1 标准状况下光伏电池MX60-245的参数
| 参数 | 数值 |
|---|---|
| 组件开路电压Uoc/V | 37.3 |
| 组件短路电流Isc/A | 8.62 |
| 组件MPP点电压Um/V | 30.5 |
| 组件MPP点电流Im/A | 8.03 |
| 组件MPP点功率Pm/W | 244.915 |
为分析在UIC和PSC情况下所提算法的的追踪效果,将此阵列置于不同光照情况下,具体的光照条件如表2所示。
表2 不同条件下各光伏电池受到的光照度情况 W/m2
| 不同光照情况 | 光伏电池1 | 光伏电池2 | 光伏电池3 |
|---|---|---|---|
| 情况a | 700 | 700 | 700 |
| 情况b | 1 000 | 1 000 | 1 000 |
| 情况c | 400 | 400 | 400 |
| 情况d | 1 000 | 300 | 280 |
| 情况e | 1 000 | 700 | 400 |
| 情况f | 1 000 | 700 | 500 |
4.1 均匀光照下的追踪
图10
4.2 局部阴影的追踪
本节为验证所提算法在PSC下的跟踪效果,与传统INC全局法(即用INC法在全电压范围内进行扫描)进行了比较,并考虑了不同PSC下的效率,各阴影条件如表2中的情况d、e和f所示,它们代表最大功率点分别位于第一峰值点(M1)、第二峰值点(M2)和第三峰值点(M3)。
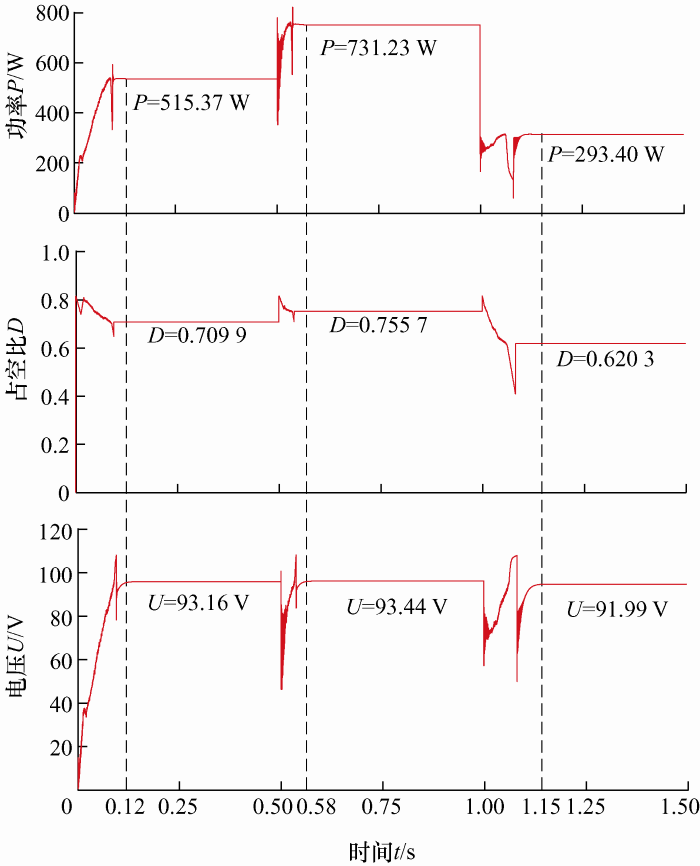
图11显示了光照条件在情况d下的仿真结果,两种算法得到的最大功率点都在M1点附近。所提算法跟踪到M1点所花时间为0.172 s,稳定时系统的输出功率为233.29 W。传统的INC所花时间为0.214 s,系统稳定时输出功率为229.20 W。
图11
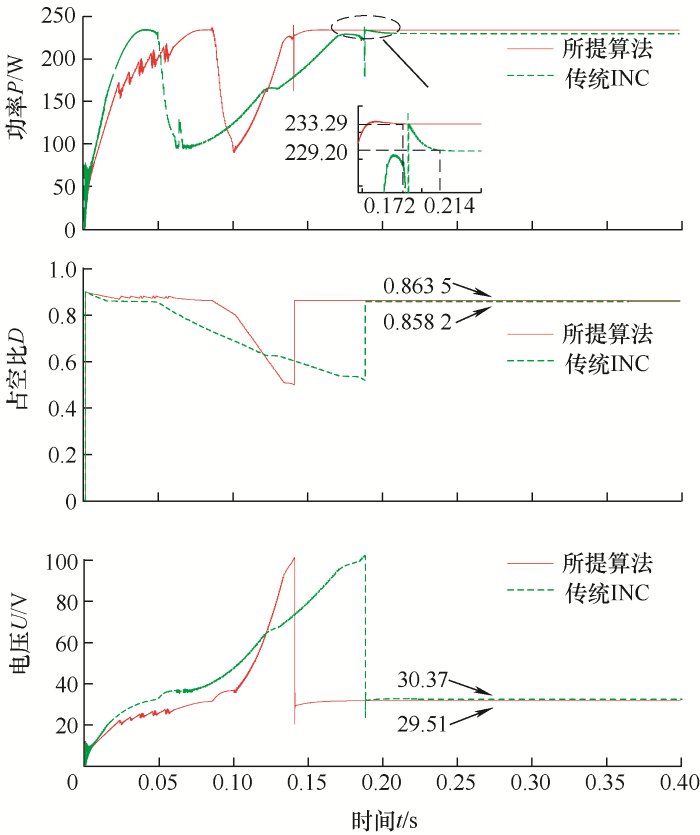
图12显示了光照条件在情况e下的仿真结果。两种算法跟踪到M2点所花时间分别为0.178 s和0.216 s,稳定时光伏阵列输出功率分别为360.63 W和356.92 W。
图12
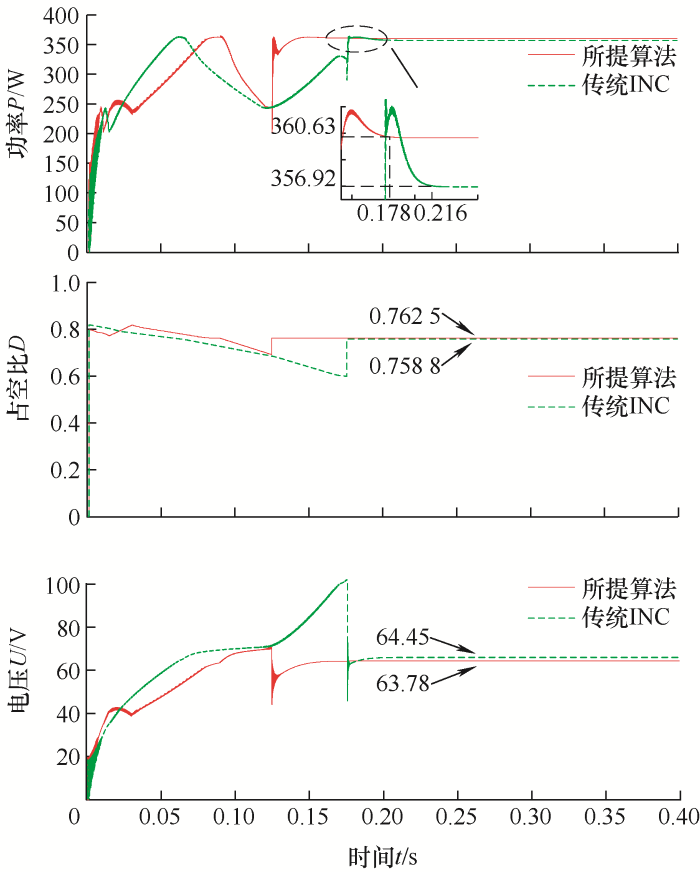
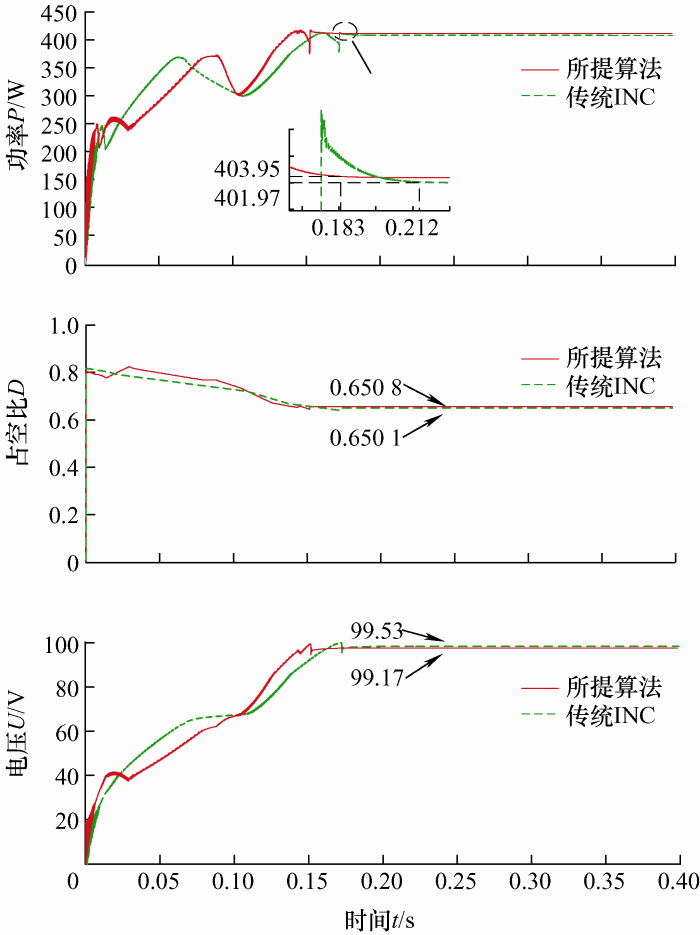
图13显示了光照条件在情况f下的仿真结果。两种算法跟踪到M3点所花时间分别为0.183 s和0.212 s,稳定时光伏阵列输出功率分别为403.95 W和401.97 W。
图13
4.3 结果分析
在第4.2节中,光伏阵列分别处于在三种不同的PSC情况下,传统INC全局搜索法在每种PSC情况下追踪到全局最大功率所用时间相差不大,而所提全局算法由于在步骤二和步骤三中采用了更大的扰动步长d',可以缩短算法追踪时间,并且通过判断Uref是否大于0.9Uoc_arr,也可以更快结束算法。通过仿真结果可知,所提算法的追踪时间与局部阴影条件有关,即与GP点的位置有关,GP点在M1点时用时最短,M2点次之,M3点用时最长。
由于所提算法在步骤一中使用了变步长的INC法,其跟踪精度也较传统INC全局搜索法更高。两种算法在跟踪效率方面的对比如表4所示。光伏阵列的输出效率用
式中,Pideal和Preal分别指光伏阵列在某种光照情况下理论上输出的最大功率和实际输出的功率。从表4可以看出所提算法在三种光照情况下的输出效率较传统INC算法更高,且都在99%以上。
表4 跟踪效率对比
| 不同光照情况 | 算法 | Pideal/W | Preal/W | η(%) |
|---|---|---|---|---|
| 情况d | 所提算法 | 233.59 | 233.29 | 99.87 |
| 传统INC | 229.20 | 98.12 | ||
| 情况e | 所提算法 | 362.44 | 360.63 | 99.50 |
| 传统INC | 356.92 | 98.47 | ||
| 情况f | 所提算法 | 406.73 | 403.95 | 99.32 |
| 传统INC | 401.91 | 98.81 |
5 结论
通过对变步长INC法进行改进,本文提出一种适用于光伏阵列全局最大功率点跟踪的算法,整个算法主要通过四个步骤来锁定GP点,在找到GP点后调节变换器的占空比,确保系统工作在GP点附近。所提算法有以下三个特点。
(1) 在硬件电路配置方面与传统MPPT算法一样,无需增加额外的检测装置等硬件电路。
(2) 在跟踪精度方面,当算法搜索到局部峰值点左右时,所提算法使用变步长的方式减小扰动步长,提高了精度。
(3) 在跟踪速度方面,所提算法采用两种扰动步长,特别是在步骤二和步骤三中通过使用较大的扰动步长,减少了跟踪时间。
最后,通过仿真分析了在UIC和PSC条件下所提算法的运行状况。结果表明,与传统的INC法相比,该方法追踪更快、精度更高、效率更高。
参考文献
Evaluation of the main MPPT techniques for photovoltaic applications
[J].DOI:10.1109/TIE.2012.2198036 URL [本文引用: 1]
不均匀光照光伏单元串联电路快速MPPT方法
[J].
A rapid tracking method of maximum power point for solar units in series under uneven solar irradiance
[J].
基于改进型变步长电导增量法的最大功率点跟踪策略
[J].
Maximum power point tracking strategy based on modified variable step-size incremental conductance algorithm
[J].
基于改进电导增量法的光伏阵列 MPPT
[J].
Research of MPPT technology based on variable step length conductance increment method
[J].
Self-adaptive incremental conductance algorithm for swift and ripple-free maximum power harvesting from PV array
[J].DOI:10.1109/TII.2017.2765083 URL [本文引用: 1]
光伏电池建模及变步长MPPT控制
[J].
Modeling of photovoltaic cells and MPPT control algorithm with variable step
[J].
改进型扰动观察法在光伏 MPPT 中的研究
[J].
Application of improved perturbation and observation method to photovoltaic MPPT
[J].
基于差分进化的光伏MPPT算法改进
[J].
An improved photovoltaic MPPT algorithm based on differential evolution algorithm
[J].
Improved differential evolution-based MPPT algorithm using SEPIC for PV systems under partial shading conditions and load variation
[J].DOI:10.1109/TII.9424 URL [本文引用: 1]
Artificial neural network-based photovoltaic maximum power point tracking techniques:A survey
[J].DOI:10.1049/rpg2.v9.8 URL [本文引用: 1]
改进鸡群算法在光伏系统MPPT中的应用
[J].
Application of improved chicken swarm optimization for MPPT in photovoltaic system
[J].
基于二进制蚁群模糊神经网络的光伏系统MPPT控制算法研究
[J].
Research on MPPT control algorithm of photovoltaic system by binary colony algorithm and fuzzy neural network
[J].
光伏阵列多峰最大功率点优化跟踪算法
[J].
Optimization algorithm of multi-peak maximum power point tracking for PV array
[J].
基于直线方程求解与波峰区间划分的串联光伏组件多峰MPPT方法
[J].
Multi modal MPPT algorithm for series PV modules based on linear equation and peak partial PV module
[J].
A global maximum power point tracking algorithm for photovoltaic systems under partially shaded conditions using modified maximum power trapezium method
[J].DOI:10.1109/TIE.41 URL [本文引用: 1]
Global maximum power point tracking method for photovoltaic arrays under partial shading conditions
[J].DOI:10.1109/TIE.2016.2632679 URL [本文引用: 2]
A novel global maximum power point tracking strategy (GMPPT) based on optimal current control for photovoltaic systems adaptive to variable environmental and partial shading conditions
[J].
适用于商业航天的全局MPPT优化算法
[J].
A global MPPT optimization algorithm for commercial aerospace
[J].
复杂光照条件下串联光伏阵列特性研究及最大功率跟踪
[J].
Study on characteristics of series photovoltaic array and maximum power tracking under complex illumination
[J].
A novel voltage-current characteristic based global maximum power point tracking algorithm in photovoltaic systems
[J].DOI:10.1016/j.energy.2016.05.121 URL [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}