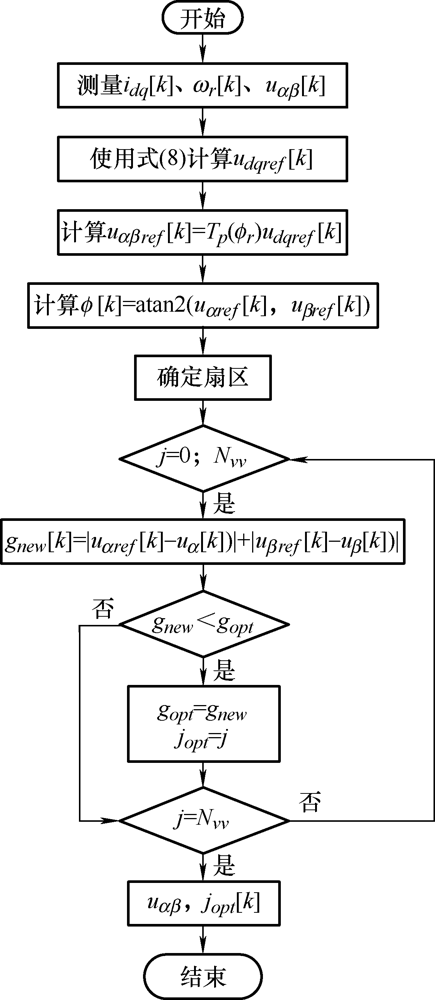
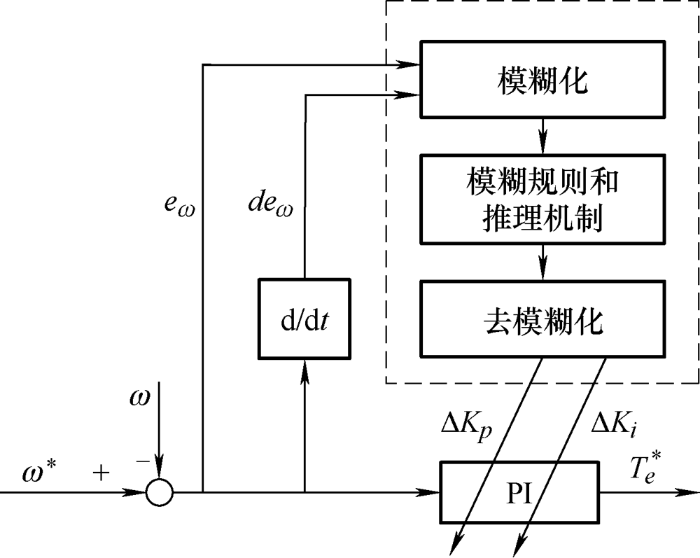
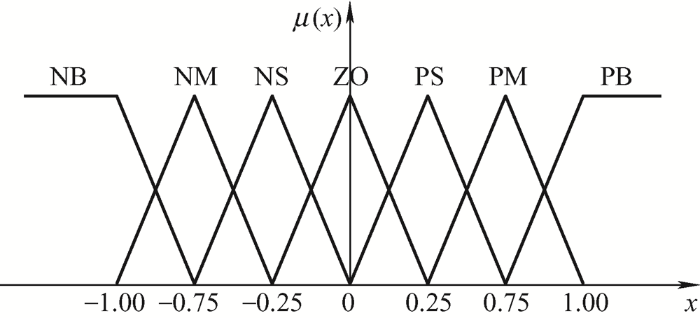
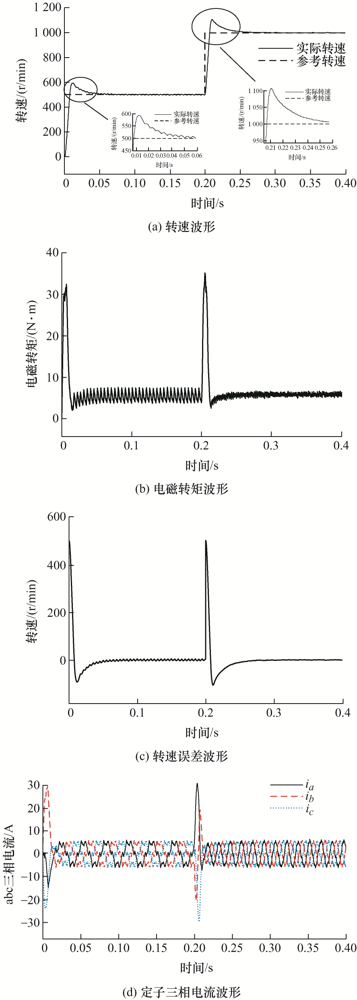
针对传统模型预测控制中采用一个最优电压矢量存在抖动的问题,提出了一种基于模糊逻辑的多矢量有限控制集模型预测控制(Multi-vector finite control set model predictive control,MV-FCS-MPC)方案。所提方法基于离散空间矢量调制(Discrete space vector modulation,DSVM),利用变换器的实际电压矢量和新的虚拟电压矢量,合成并选择每个采样周期的开关序列,提高稳态性能。考虑到传统模型预测控制存在的运算量大,提出了基于无差拍函数直接从参考电流获得参考电压矢量的方法,减少了所提方法的计算量。针对传统PI控制无法适应外部扰动和参数变化对系统的影响,在外环速度中采用了模糊逻辑控制器来控制转子的转速,从而提高了速度的动态响应,避免了PI控制器整定的困难。通过仿真和试验并与传统的FCS-MPC方法进行了比较,表明所提方法动静态性能良好,鲁棒性强。
关键词:模型预测控制
;
模糊控制
;
多矢量
;
无差拍函数
;
永磁同步电机
Abstract
Aiming at the jitter problem of using an optimal voltage vector in traditional model predictive control, a multi-vector finite control set model predictive control(MV-FCS-MPC) scheme based on fuzzy logic is proposed. Based on discrete space vector modulation, the proposed method synthesizes and selects the switching sequence of each sampling period by using the actual voltage vector and the new virtual voltage vector of the converter to improve the steady-state performance. Considering the large amount of computation of traditional model predictive control, a method of obtaining reference voltage vector directly from reference current based on deadbeat function is proposed, which reduces the amount of calculation of the proposed method. In view of the fact that the traditional PI control cannot adapt to the influence of external disturbance and parameter change on the system, the fuzzy logic controller is used to control the speed of the rotor in the outer loop speed, which improves the dynamic response of the speed and avoids the difficulty of setting the PI controller. Through simulation and experiment, and compared with the traditional FCS-MPC method, it shows that the proposed method has good dynamic and static performance and strong robustness.
Keywords:Model predictive control
;
fuzzy logic controller
;
multiple-vector
;
deadbeat function
;
PMSM
ZHOU Li, SU Meixia, WANG Jie. Fuzzy Multi-vector Model Predictive Control of Permanent Magnet Synchronous Motor. Chinese Journal of Electrical Engineering[J], 2022, 17(4): 181-192 doi:10.11985/2022.04.018
为了解决传统有限控制集模型预测控制(Finite control set model predictive control,FCS-MPC)存在的电压矢量选择和可变开关频率的不确定性。文献[6]提出了一种模型预测电流控制(Model predictive current control,MPCC)方法,将FCS-MPC控制策略与电流控制相结合,实现了高精度的电流跟踪。文献[7]提出一种直接电压选择和优化占空比计算的永磁同步电机直接转速控制方法。文献[8]通过优化占空比,将两个电压矢量组合应用于永磁同步电机的FCS-MPC,先选择第一个电压矢量,第二个电压矢量由另外三个候选矢量提供,存在18个迭代组合,计算量较大。文献[9-10]提出了在单个控制周期内使用两个电压矢量的方案,基于多矢量预测控制(Multi-vector model predictive control,MV-MPC)和空间矢量调制(Space vector modulation,SVM)的无差拍控制,直接计算出最优电压矢量及其对应的占空比,应用于异步电机。但FCS-MPC中引入占空比控制增加了控制的复杂性。文献[11]提出了永磁同步电机驱动的广义多矢量模型预测控制,该方法具有良好的稳态性能,但控制复杂度较高。文献[12]将无差拍原理与传统的FCS-MPC相结合,只使用一个电压矢量,减少了计算量但稳态响应较差。文献[13]提出了一种基于离散空间矢量调制(Discrete space vector modulation,DSVM)的FCS-MPC方法,使用虚拟开关矢量的离散空间矢量调制,与FCS-MPC只使用实际电压矢量状态不同,而是考虑了变换器的整个控制区域,核心思想是基于DSVM将虚拟矢量和实际离散矢量结合,呈现良好的动态性能,但是存在庞大的计算量。为了减少计算量,参考电压由参考电流的无差拍函数计算出来,然后根据电压矢量位置,采用实际电压矢量和新的虚拟电压矢量相结合的方法来改善控制器的性能,由于外环采用比例-积分(Proportional-integral,PI)控制器,导致外环的带宽有限,系统的动态性能较慢。
In permanent-magnet synchronous machine (PMSM) applications, traditional deadbeat predictive current control (DPCC) utilizes the PMSM model to evaluate the expected voltage vector and applies it to the inverter through space vector pulse width modulation (SVPWM). Once the expected voltage vector is inaccurate, the torque ripple and speed fluctuation are amplified. There are two main factors that cause the inaccurate voltage vector, namely model parameter mismatch, and current measurement error. To enhance the robustness of DPCC, first, this paper proposes an accurate PMSM voltage model with nonperiodic and periodic disturbance models. Second, this paper proposes a novel current and disturbance observer (NCDO) which is able to predict future stator currents and disturbances caused by model parameter mismatch and current measurement error simultaneously. Finally, the scheme of the proposed DPCC with NCDO is presented to enhance the robustness. This paper presents a comparative study of two types of algorithms, namely traditional DPCC and the proposed DPCC with NCDO. The theoretical verification, simulation results, and experimental results are demonstrated to verify the effectiveness of the proposed DPCC with NCDO.
A universal multiple-vector-based model predictive control of induction motor drives
1
2017
... 为了解决传统有限控制集模型预测控制(Finite control set model predictive control,FCS-MPC)存在的电压矢量选择和可变开关频率的不确定性.文献[6]提出了一种模型预测电流控制(Model predictive current control,MPCC)方法,将FCS-MPC控制策略与电流控制相结合,实现了高精度的电流跟踪.文献[7]提出一种直接电压选择和优化占空比计算的永磁同步电机直接转速控制方法.文献[8]通过优化占空比,将两个电压矢量组合应用于永磁同步电机的FCS-MPC,先选择第一个电压矢量,第二个电压矢量由另外三个候选矢量提供,存在18个迭代组合,计算量较大.文献[9-10]提出了在单个控制周期内使用两个电压矢量的方案,基于多矢量预测控制(Multi-vector model predictive control,MV-MPC)和空间矢量调制(Space vector modulation,SVM)的无差拍控制,直接计算出最优电压矢量及其对应的占空比,应用于异步电机.但FCS-MPC中引入占空比控制增加了控制的复杂性.文献[11]提出了永磁同步电机驱动的广义多矢量模型预测控制,该方法具有良好的稳态性能,但控制复杂度较高.文献[12]将无差拍原理与传统的FCS-MPC相结合,只使用一个电压矢量,减少了计算量但稳态响应较差.文献[13]提出了一种基于离散空间矢量调制(Discrete space vector modulation,DSVM)的FCS-MPC方法,使用虚拟开关矢量的离散空间矢量调制,与FCS-MPC只使用实际电压矢量状态不同,而是考虑了变换器的整个控制区域,核心思想是基于DSVM将虚拟矢量和实际离散矢量结合,呈现良好的动态性能,但是存在庞大的计算量.为了减少计算量,参考电压由参考电流的无差拍函数计算出来,然后根据电压矢量位置,采用实际电压矢量和新的虚拟电压矢量相结合的方法来改善控制器的性能,由于外环采用比例-积分(Proportional-integral,PI)控制器,导致外环的带宽有限,系统的动态性能较慢. ...
基于占空比调制的永磁同步电机预测电流控制
1
2020
... 为了解决传统有限控制集模型预测控制(Finite control set model predictive control,FCS-MPC)存在的电压矢量选择和可变开关频率的不确定性.文献[6]提出了一种模型预测电流控制(Model predictive current control,MPCC)方法,将FCS-MPC控制策略与电流控制相结合,实现了高精度的电流跟踪.文献[7]提出一种直接电压选择和优化占空比计算的永磁同步电机直接转速控制方法.文献[8]通过优化占空比,将两个电压矢量组合应用于永磁同步电机的FCS-MPC,先选择第一个电压矢量,第二个电压矢量由另外三个候选矢量提供,存在18个迭代组合,计算量较大.文献[9-10]提出了在单个控制周期内使用两个电压矢量的方案,基于多矢量预测控制(Multi-vector model predictive control,MV-MPC)和空间矢量调制(Space vector modulation,SVM)的无差拍控制,直接计算出最优电压矢量及其对应的占空比,应用于异步电机.但FCS-MPC中引入占空比控制增加了控制的复杂性.文献[11]提出了永磁同步电机驱动的广义多矢量模型预测控制,该方法具有良好的稳态性能,但控制复杂度较高.文献[12]将无差拍原理与传统的FCS-MPC相结合,只使用一个电压矢量,减少了计算量但稳态响应较差.文献[13]提出了一种基于离散空间矢量调制(Discrete space vector modulation,DSVM)的FCS-MPC方法,使用虚拟开关矢量的离散空间矢量调制,与FCS-MPC只使用实际电压矢量状态不同,而是考虑了变换器的整个控制区域,核心思想是基于DSVM将虚拟矢量和实际离散矢量结合,呈现良好的动态性能,但是存在庞大的计算量.为了减少计算量,参考电压由参考电流的无差拍函数计算出来,然后根据电压矢量位置,采用实际电压矢量和新的虚拟电压矢量相结合的方法来改善控制器的性能,由于外环采用比例-积分(Proportional-integral,PI)控制器,导致外环的带宽有限,系统的动态性能较慢. ...
Predictive current control of permanent magnet synchronous motor based on duty cycle modulation
1
2020
... 为了解决传统有限控制集模型预测控制(Finite control set model predictive control,FCS-MPC)存在的电压矢量选择和可变开关频率的不确定性.文献[6]提出了一种模型预测电流控制(Model predictive current control,MPCC)方法,将FCS-MPC控制策略与电流控制相结合,实现了高精度的电流跟踪.文献[7]提出一种直接电压选择和优化占空比计算的永磁同步电机直接转速控制方法.文献[8]通过优化占空比,将两个电压矢量组合应用于永磁同步电机的FCS-MPC,先选择第一个电压矢量,第二个电压矢量由另外三个候选矢量提供,存在18个迭代组合,计算量较大.文献[9-10]提出了在单个控制周期内使用两个电压矢量的方案,基于多矢量预测控制(Multi-vector model predictive control,MV-MPC)和空间矢量调制(Space vector modulation,SVM)的无差拍控制,直接计算出最优电压矢量及其对应的占空比,应用于异步电机.但FCS-MPC中引入占空比控制增加了控制的复杂性.文献[11]提出了永磁同步电机驱动的广义多矢量模型预测控制,该方法具有良好的稳态性能,但控制复杂度较高.文献[12]将无差拍原理与传统的FCS-MPC相结合,只使用一个电压矢量,减少了计算量但稳态响应较差.文献[13]提出了一种基于离散空间矢量调制(Discrete space vector modulation,DSVM)的FCS-MPC方法,使用虚拟开关矢量的离散空间矢量调制,与FCS-MPC只使用实际电压矢量状态不同,而是考虑了变换器的整个控制区域,核心思想是基于DSVM将虚拟矢量和实际离散矢量结合,呈现良好的动态性能,但是存在庞大的计算量.为了减少计算量,参考电压由参考电流的无差拍函数计算出来,然后根据电压矢量位置,采用实际电压矢量和新的虚拟电压矢量相结合的方法来改善控制器的性能,由于外环采用比例-积分(Proportional-integral,PI)控制器,导致外环的带宽有限,系统的动态性能较慢. ...
Simplified fault tolerant finite control set model predictive control of a five-phase inverter supplying BLDC motor in electric vehicle drive
1
2016
... 为了解决传统有限控制集模型预测控制(Finite control set model predictive control,FCS-MPC)存在的电压矢量选择和可变开关频率的不确定性.文献[6]提出了一种模型预测电流控制(Model predictive current control,MPCC)方法,将FCS-MPC控制策略与电流控制相结合,实现了高精度的电流跟踪.文献[7]提出一种直接电压选择和优化占空比计算的永磁同步电机直接转速控制方法.文献[8]通过优化占空比,将两个电压矢量组合应用于永磁同步电机的FCS-MPC,先选择第一个电压矢量,第二个电压矢量由另外三个候选矢量提供,存在18个迭代组合,计算量较大.文献[9-10]提出了在单个控制周期内使用两个电压矢量的方案,基于多矢量预测控制(Multi-vector model predictive control,MV-MPC)和空间矢量调制(Space vector modulation,SVM)的无差拍控制,直接计算出最优电压矢量及其对应的占空比,应用于异步电机.但FCS-MPC中引入占空比控制增加了控制的复杂性.文献[11]提出了永磁同步电机驱动的广义多矢量模型预测控制,该方法具有良好的稳态性能,但控制复杂度较高.文献[12]将无差拍原理与传统的FCS-MPC相结合,只使用一个电压矢量,减少了计算量但稳态响应较差.文献[13]提出了一种基于离散空间矢量调制(Discrete space vector modulation,DSVM)的FCS-MPC方法,使用虚拟开关矢量的离散空间矢量调制,与FCS-MPC只使用实际电压矢量状态不同,而是考虑了变换器的整个控制区域,核心思想是基于DSVM将虚拟矢量和实际离散矢量结合,呈现良好的动态性能,但是存在庞大的计算量.为了减少计算量,参考电压由参考电流的无差拍函数计算出来,然后根据电压矢量位置,采用实际电压矢量和新的虚拟电压矢量相结合的方法来改善控制器的性能,由于外环采用比例-积分(Proportional-integral,PI)控制器,导致外环的带宽有限,系统的动态性能较慢. ...
永磁同步电机新型三矢量模型预测电流控制
1
2018
... 为了解决传统有限控制集模型预测控制(Finite control set model predictive control,FCS-MPC)存在的电压矢量选择和可变开关频率的不确定性.文献[6]提出了一种模型预测电流控制(Model predictive current control,MPCC)方法,将FCS-MPC控制策略与电流控制相结合,实现了高精度的电流跟踪.文献[7]提出一种直接电压选择和优化占空比计算的永磁同步电机直接转速控制方法.文献[8]通过优化占空比,将两个电压矢量组合应用于永磁同步电机的FCS-MPC,先选择第一个电压矢量,第二个电压矢量由另外三个候选矢量提供,存在18个迭代组合,计算量较大.文献[9-10]提出了在单个控制周期内使用两个电压矢量的方案,基于多矢量预测控制(Multi-vector model predictive control,MV-MPC)和空间矢量调制(Space vector modulation,SVM)的无差拍控制,直接计算出最优电压矢量及其对应的占空比,应用于异步电机.但FCS-MPC中引入占空比控制增加了控制的复杂性.文献[11]提出了永磁同步电机驱动的广义多矢量模型预测控制,该方法具有良好的稳态性能,但控制复杂度较高.文献[12]将无差拍原理与传统的FCS-MPC相结合,只使用一个电压矢量,减少了计算量但稳态响应较差.文献[13]提出了一种基于离散空间矢量调制(Discrete space vector modulation,DSVM)的FCS-MPC方法,使用虚拟开关矢量的离散空间矢量调制,与FCS-MPC只使用实际电压矢量状态不同,而是考虑了变换器的整个控制区域,核心思想是基于DSVM将虚拟矢量和实际离散矢量结合,呈现良好的动态性能,但是存在庞大的计算量.为了减少计算量,参考电压由参考电流的无差拍函数计算出来,然后根据电压矢量位置,采用实际电压矢量和新的虚拟电压矢量相结合的方法来改善控制器的性能,由于外环采用比例-积分(Proportional-integral,PI)控制器,导致外环的带宽有限,系统的动态性能较慢. ...
New three vector model predictive current control for permanent magnet synchronous motor
1
2018
... 为了解决传统有限控制集模型预测控制(Finite control set model predictive control,FCS-MPC)存在的电压矢量选择和可变开关频率的不确定性.文献[6]提出了一种模型预测电流控制(Model predictive current control,MPCC)方法,将FCS-MPC控制策略与电流控制相结合,实现了高精度的电流跟踪.文献[7]提出一种直接电压选择和优化占空比计算的永磁同步电机直接转速控制方法.文献[8]通过优化占空比,将两个电压矢量组合应用于永磁同步电机的FCS-MPC,先选择第一个电压矢量,第二个电压矢量由另外三个候选矢量提供,存在18个迭代组合,计算量较大.文献[9-10]提出了在单个控制周期内使用两个电压矢量的方案,基于多矢量预测控制(Multi-vector model predictive control,MV-MPC)和空间矢量调制(Space vector modulation,SVM)的无差拍控制,直接计算出最优电压矢量及其对应的占空比,应用于异步电机.但FCS-MPC中引入占空比控制增加了控制的复杂性.文献[11]提出了永磁同步电机驱动的广义多矢量模型预测控制,该方法具有良好的稳态性能,但控制复杂度较高.文献[12]将无差拍原理与传统的FCS-MPC相结合,只使用一个电压矢量,减少了计算量但稳态响应较差.文献[13]提出了一种基于离散空间矢量调制(Discrete space vector modulation,DSVM)的FCS-MPC方法,使用虚拟开关矢量的离散空间矢量调制,与FCS-MPC只使用实际电压矢量状态不同,而是考虑了变换器的整个控制区域,核心思想是基于DSVM将虚拟矢量和实际离散矢量结合,呈现良好的动态性能,但是存在庞大的计算量.为了减少计算量,参考电压由参考电流的无差拍函数计算出来,然后根据电压矢量位置,采用实际电压矢量和新的虚拟电压矢量相结合的方法来改善控制器的性能,由于外环采用比例-积分(Proportional-integral,PI)控制器,导致外环的带宽有限,系统的动态性能较慢. ...
永磁同步电机参数误差补偿三矢量模型预测电流控制
1
2020
... 为了解决传统有限控制集模型预测控制(Finite control set model predictive control,FCS-MPC)存在的电压矢量选择和可变开关频率的不确定性.文献[6]提出了一种模型预测电流控制(Model predictive current control,MPCC)方法,将FCS-MPC控制策略与电流控制相结合,实现了高精度的电流跟踪.文献[7]提出一种直接电压选择和优化占空比计算的永磁同步电机直接转速控制方法.文献[8]通过优化占空比,将两个电压矢量组合应用于永磁同步电机的FCS-MPC,先选择第一个电压矢量,第二个电压矢量由另外三个候选矢量提供,存在18个迭代组合,计算量较大.文献[9-10]提出了在单个控制周期内使用两个电压矢量的方案,基于多矢量预测控制(Multi-vector model predictive control,MV-MPC)和空间矢量调制(Space vector modulation,SVM)的无差拍控制,直接计算出最优电压矢量及其对应的占空比,应用于异步电机.但FCS-MPC中引入占空比控制增加了控制的复杂性.文献[11]提出了永磁同步电机驱动的广义多矢量模型预测控制,该方法具有良好的稳态性能,但控制复杂度较高.文献[12]将无差拍原理与传统的FCS-MPC相结合,只使用一个电压矢量,减少了计算量但稳态响应较差.文献[13]提出了一种基于离散空间矢量调制(Discrete space vector modulation,DSVM)的FCS-MPC方法,使用虚拟开关矢量的离散空间矢量调制,与FCS-MPC只使用实际电压矢量状态不同,而是考虑了变换器的整个控制区域,核心思想是基于DSVM将虚拟矢量和实际离散矢量结合,呈现良好的动态性能,但是存在庞大的计算量.为了减少计算量,参考电压由参考电流的无差拍函数计算出来,然后根据电压矢量位置,采用实际电压矢量和新的虚拟电压矢量相结合的方法来改善控制器的性能,由于外环采用比例-积分(Proportional-integral,PI)控制器,导致外环的带宽有限,系统的动态性能较慢. ...
Parameter error compensation of permanent magnet synchronous motor-three vector model predictive current control
1
2020
... 为了解决传统有限控制集模型预测控制(Finite control set model predictive control,FCS-MPC)存在的电压矢量选择和可变开关频率的不确定性.文献[6]提出了一种模型预测电流控制(Model predictive current control,MPCC)方法,将FCS-MPC控制策略与电流控制相结合,实现了高精度的电流跟踪.文献[7]提出一种直接电压选择和优化占空比计算的永磁同步电机直接转速控制方法.文献[8]通过优化占空比,将两个电压矢量组合应用于永磁同步电机的FCS-MPC,先选择第一个电压矢量,第二个电压矢量由另外三个候选矢量提供,存在18个迭代组合,计算量较大.文献[9-10]提出了在单个控制周期内使用两个电压矢量的方案,基于多矢量预测控制(Multi-vector model predictive control,MV-MPC)和空间矢量调制(Space vector modulation,SVM)的无差拍控制,直接计算出最优电压矢量及其对应的占空比,应用于异步电机.但FCS-MPC中引入占空比控制增加了控制的复杂性.文献[11]提出了永磁同步电机驱动的广义多矢量模型预测控制,该方法具有良好的稳态性能,但控制复杂度较高.文献[12]将无差拍原理与传统的FCS-MPC相结合,只使用一个电压矢量,减少了计算量但稳态响应较差.文献[13]提出了一种基于离散空间矢量调制(Discrete space vector modulation,DSVM)的FCS-MPC方法,使用虚拟开关矢量的离散空间矢量调制,与FCS-MPC只使用实际电压矢量状态不同,而是考虑了变换器的整个控制区域,核心思想是基于DSVM将虚拟矢量和实际离散矢量结合,呈现良好的动态性能,但是存在庞大的计算量.为了减少计算量,参考电压由参考电流的无差拍函数计算出来,然后根据电压矢量位置,采用实际电压矢量和新的虚拟电压矢量相结合的方法来改善控制器的性能,由于外环采用比例-积分(Proportional-integral,PI)控制器,导致外环的带宽有限,系统的动态性能较慢. ...
Enhanced robust deadbeat predictive current control for PMSM drives
1
2019
... 为了解决传统有限控制集模型预测控制(Finite control set model predictive control,FCS-MPC)存在的电压矢量选择和可变开关频率的不确定性.文献[6]提出了一种模型预测电流控制(Model predictive current control,MPCC)方法,将FCS-MPC控制策略与电流控制相结合,实现了高精度的电流跟踪.文献[7]提出一种直接电压选择和优化占空比计算的永磁同步电机直接转速控制方法.文献[8]通过优化占空比,将两个电压矢量组合应用于永磁同步电机的FCS-MPC,先选择第一个电压矢量,第二个电压矢量由另外三个候选矢量提供,存在18个迭代组合,计算量较大.文献[9-10]提出了在单个控制周期内使用两个电压矢量的方案,基于多矢量预测控制(Multi-vector model predictive control,MV-MPC)和空间矢量调制(Space vector modulation,SVM)的无差拍控制,直接计算出最优电压矢量及其对应的占空比,应用于异步电机.但FCS-MPC中引入占空比控制增加了控制的复杂性.文献[11]提出了永磁同步电机驱动的广义多矢量模型预测控制,该方法具有良好的稳态性能,但控制复杂度较高.文献[12]将无差拍原理与传统的FCS-MPC相结合,只使用一个电压矢量,减少了计算量但稳态响应较差.文献[13]提出了一种基于离散空间矢量调制(Discrete space vector modulation,DSVM)的FCS-MPC方法,使用虚拟开关矢量的离散空间矢量调制,与FCS-MPC只使用实际电压矢量状态不同,而是考虑了变换器的整个控制区域,核心思想是基于DSVM将虚拟矢量和实际离散矢量结合,呈现良好的动态性能,但是存在庞大的计算量.为了减少计算量,参考电压由参考电流的无差拍函数计算出来,然后根据电压矢量位置,采用实际电压矢量和新的虚拟电压矢量相结合的方法来改善控制器的性能,由于外环采用比例-积分(Proportional-integral,PI)控制器,导致外环的带宽有限,系统的动态性能较慢. ...
一种基于模型预测的永磁同步电机直接转矩控制策略
1
2021
... 为了解决传统有限控制集模型预测控制(Finite control set model predictive control,FCS-MPC)存在的电压矢量选择和可变开关频率的不确定性.文献[6]提出了一种模型预测电流控制(Model predictive current control,MPCC)方法,将FCS-MPC控制策略与电流控制相结合,实现了高精度的电流跟踪.文献[7]提出一种直接电压选择和优化占空比计算的永磁同步电机直接转速控制方法.文献[8]通过优化占空比,将两个电压矢量组合应用于永磁同步电机的FCS-MPC,先选择第一个电压矢量,第二个电压矢量由另外三个候选矢量提供,存在18个迭代组合,计算量较大.文献[9-10]提出了在单个控制周期内使用两个电压矢量的方案,基于多矢量预测控制(Multi-vector model predictive control,MV-MPC)和空间矢量调制(Space vector modulation,SVM)的无差拍控制,直接计算出最优电压矢量及其对应的占空比,应用于异步电机.但FCS-MPC中引入占空比控制增加了控制的复杂性.文献[11]提出了永磁同步电机驱动的广义多矢量模型预测控制,该方法具有良好的稳态性能,但控制复杂度较高.文献[12]将无差拍原理与传统的FCS-MPC相结合,只使用一个电压矢量,减少了计算量但稳态响应较差.文献[13]提出了一种基于离散空间矢量调制(Discrete space vector modulation,DSVM)的FCS-MPC方法,使用虚拟开关矢量的离散空间矢量调制,与FCS-MPC只使用实际电压矢量状态不同,而是考虑了变换器的整个控制区域,核心思想是基于DSVM将虚拟矢量和实际离散矢量结合,呈现良好的动态性能,但是存在庞大的计算量.为了减少计算量,参考电压由参考电流的无差拍函数计算出来,然后根据电压矢量位置,采用实际电压矢量和新的虚拟电压矢量相结合的方法来改善控制器的性能,由于外环采用比例-积分(Proportional-integral,PI)控制器,导致外环的带宽有限,系统的动态性能较慢. ...
A direct torque control strategy of permanent magnet synchronous motor based on model prediction
1
2021
... 为了解决传统有限控制集模型预测控制(Finite control set model predictive control,FCS-MPC)存在的电压矢量选择和可变开关频率的不确定性.文献[6]提出了一种模型预测电流控制(Model predictive current control,MPCC)方法,将FCS-MPC控制策略与电流控制相结合,实现了高精度的电流跟踪.文献[7]提出一种直接电压选择和优化占空比计算的永磁同步电机直接转速控制方法.文献[8]通过优化占空比,将两个电压矢量组合应用于永磁同步电机的FCS-MPC,先选择第一个电压矢量,第二个电压矢量由另外三个候选矢量提供,存在18个迭代组合,计算量较大.文献[9-10]提出了在单个控制周期内使用两个电压矢量的方案,基于多矢量预测控制(Multi-vector model predictive control,MV-MPC)和空间矢量调制(Space vector modulation,SVM)的无差拍控制,直接计算出最优电压矢量及其对应的占空比,应用于异步电机.但FCS-MPC中引入占空比控制增加了控制的复杂性.文献[11]提出了永磁同步电机驱动的广义多矢量模型预测控制,该方法具有良好的稳态性能,但控制复杂度较高.文献[12]将无差拍原理与传统的FCS-MPC相结合,只使用一个电压矢量,减少了计算量但稳态响应较差.文献[13]提出了一种基于离散空间矢量调制(Discrete space vector modulation,DSVM)的FCS-MPC方法,使用虚拟开关矢量的离散空间矢量调制,与FCS-MPC只使用实际电压矢量状态不同,而是考虑了变换器的整个控制区域,核心思想是基于DSVM将虚拟矢量和实际离散矢量结合,呈现良好的动态性能,但是存在庞大的计算量.为了减少计算量,参考电压由参考电流的无差拍函数计算出来,然后根据电压矢量位置,采用实际电压矢量和新的虚拟电压矢量相结合的方法来改善控制器的性能,由于外环采用比例-积分(Proportional-integral,PI)控制器,导致外环的带宽有限,系统的动态性能较慢. ...
Generalized multiple-vector-based model predictive control for PMSM drives
1
2018
... 为了解决传统有限控制集模型预测控制(Finite control set model predictive control,FCS-MPC)存在的电压矢量选择和可变开关频率的不确定性.文献[6]提出了一种模型预测电流控制(Model predictive current control,MPCC)方法,将FCS-MPC控制策略与电流控制相结合,实现了高精度的电流跟踪.文献[7]提出一种直接电压选择和优化占空比计算的永磁同步电机直接转速控制方法.文献[8]通过优化占空比,将两个电压矢量组合应用于永磁同步电机的FCS-MPC,先选择第一个电压矢量,第二个电压矢量由另外三个候选矢量提供,存在18个迭代组合,计算量较大.文献[9-10]提出了在单个控制周期内使用两个电压矢量的方案,基于多矢量预测控制(Multi-vector model predictive control,MV-MPC)和空间矢量调制(Space vector modulation,SVM)的无差拍控制,直接计算出最优电压矢量及其对应的占空比,应用于异步电机.但FCS-MPC中引入占空比控制增加了控制的复杂性.文献[11]提出了永磁同步电机驱动的广义多矢量模型预测控制,该方法具有良好的稳态性能,但控制复杂度较高.文献[12]将无差拍原理与传统的FCS-MPC相结合,只使用一个电压矢量,减少了计算量但稳态响应较差.文献[13]提出了一种基于离散空间矢量调制(Discrete space vector modulation,DSVM)的FCS-MPC方法,使用虚拟开关矢量的离散空间矢量调制,与FCS-MPC只使用实际电压矢量状态不同,而是考虑了变换器的整个控制区域,核心思想是基于DSVM将虚拟矢量和实际离散矢量结合,呈现良好的动态性能,但是存在庞大的计算量.为了减少计算量,参考电压由参考电流的无差拍函数计算出来,然后根据电压矢量位置,采用实际电压矢量和新的虚拟电压矢量相结合的方法来改善控制器的性能,由于外环采用比例-积分(Proportional-integral,PI)控制器,导致外环的带宽有限,系统的动态性能较慢. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}