1 引言
永磁同步电机因其功率密度大、噪声低、效率高等优点,被广泛应用于各个领域,包括机器人、家用电器等领域[1 ⇓ -3 ] 。为了对永磁同步电机进行精准控制,需要精确的角度位置信号,通常通过旋转变压器等位置传感器采集位置信号,但是位置传感器存在成本高、易受干扰且安装维护困难等问题[4 ⇓ ⇓ ⇓ -8 ] ,所以学者们提出了无位置传感器控制技术。
无位置传感器控制技术是一种转子位置自检测的技术,无需利用任何位置传感器,本质是基于电机的数学模型,通过检测包含电机转子的凸极性的电流或电压信号,或是估算电机反电势(反电势法),从而进行角度位置估算。国内外学者针对“反电势法”已经进行了深入研究,包含滑模观测器法[9 ] 、状态观测器法[10 ] 等,目前主要应用于高速段。但是速度较低时,反电势较小,角度位置难以通过“反电势法”获得,所以低速段一般通过检测电机转子的凸极性来进行角度位置估算。
低速段的常用方法为高频注入法[11 -12 ] ,高频注入法通过外加高频电压或电流[13 ] ,解调出包含转子位置信息的高频电流或电压,进而得到准确的角度位置信息,这种方法在低速段估算准确[14 ⇓ -16 ] ,但附加的高频信号增加了转矩脉动、噪声和损耗[5 ] ,且用于信号提取的滤波环节影响电机动态性能,还需要额外的极性辨识,否则电机带载起动失败或反转[7 -8 ] 。
在电机控制中,常用空间矢量脉宽调制技术(Space vector pulse width modulation, SVPWM)产生开关管驱动信号,SVPWM是在一个开关周期内,通过一系列幅值相同占空比不同的脉冲方波矢量合成目标电压矢量,从而对电机进行有效调制。脉冲方波矢量相当于高频脉冲作用在电机上,所以不需要外加注入信号,仅通过检测脉冲方波矢量作用区间内的高频电流微分[3 ⇓ -5 ] ,便能计算出角度位置,减少了噪声和损耗,并且在提取位置信息信号时减少了高频信号提取过程中滤波器的使用,减少延迟。
本文实现了一种在低速域无需任何注入,仅需在零电压矢量作用区间,直接检测电流导数或是多次采样计算电流导数,便能准确快速获取电机转子位置信息且能实现带载起动的无位置传感器控制方案。
2 基于高频注入法无位置传感器控制
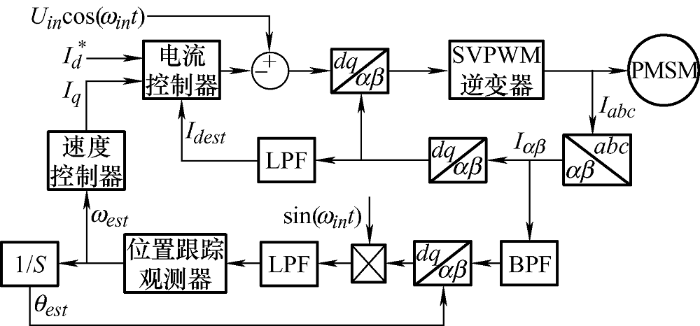
在电机起动过程中,由于电机运行速度较低,反电势小,若利用反电势法来估计转子位置信息,角度位置估算不准确。所以利用转子凸极性进行角度位置跟踪。这种方法主要是通过向控制系统中注入高频信号,电机会响应出与转子位置信息相关的信号,对此信号进行解调,便能够得出相应的角度位置,本文以脉振高频信号注入法[11 ] 为例,对此方法的原理进行分析,整体控制框图如图1 所示。
图1
该方法是向d 、q 轴中的某一个坐标轴注入高频正弦信号,信号可以是电压,也可以是电流,为了减少转矩脉动和增加电流调节器带宽,一般选择在d 轴上注入电压信号[11 ] ,通过滤波器提取高频电流信号,并根据公式解调高频电流信号,经过位置跟踪观测器,并能得出准确的角度位置。
由于高频注入法注入的信号频率一般为上千赫兹,远大于基波频率,所以可以把永磁同步电机看作是一个RL电路,又由于电阻远小于电感,因此电阻电压也可以忽略不计,进一步将永磁同步电机化简为一个电感电路,如
(1) $\left\{ \begin{align} & {{u}_{dinest}}={{L}_{d}}\frac{d{{i}_{dinest}}}{dt} \\ & {{u}_{qinest}}={{L}_{q}}\frac{d{{i}_{qinest}}}{dt} \\ \end{align} \right.$
假设在估计的d 坐标系上注入的高频电压信号如式(1)所示。其中,udinest 、uqines t 分别为估计d 、q 轴的电压;Ld 、Lq 分别为估计d 、q 轴的电感;idinest 、iqines t 分别为估计d 、q 轴的电流。
(2) $\left\{ \begin{align} & {{u}_{dinest}}={{u}_{in}}\cos \left( {{\omega }_{in}}t \right) \\ & {{u}_{qinest}}=0 \\ \end{align} \right.$
式中,uin 为注入电压的幅值;ωin 为注入信号的角频率。
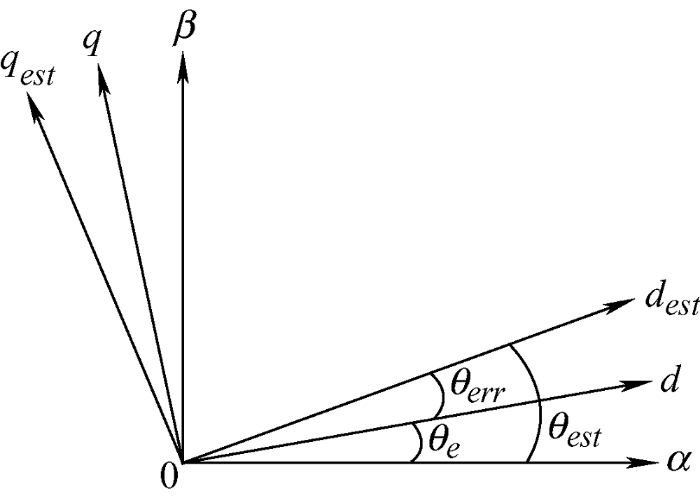
记估计d-qest 轴系与实际d-q 轴系之间的转子角度误差为θerr ,θerr =θest -θe ,θest 为估算的转子电角度,如图2 所示。将式(1)通过旋转变换转化到估算的同步旋转d-qest 轴系,并将式(2)注入的高频电压信号代入估算的同步旋转d-qest 轴系,如式(3)所示。
图2
图2
经坐标变换后转子的静止α -β 轴系、实际d-q 轴系和估计同步旋转d-qest 轴系示意图
(3) $\left\{ \begin{align} & {{i}_{dinest}}=\frac{{{u}_{in}}\sin \left( {{\omega }_{in}}t \right)}{{{\omega }_{in}}\left( \Sigma {{L}^{2}}-\Delta {{L}^{2}} \right)}\left( \Sigma L+\Delta L\cos 2{{\theta }_{est}} \right) \\ & {{i}_{qinest}}=\frac{{{u}_{in}}\sin \left( {{\omega }_{in}}t \right)}{{{\omega }_{in}}\left( \Sigma {{L}^{2}}-\Delta {{L}^{2}} \right)}\Delta L\sin 2{{\theta }_{est}} \\ \end{align} \right.$
式中,ΣL 、ΔL 分别为均值电感和半差电感;ΣL =(Ld +Lq )/2,ΔL =(Ld -Lq )/2。
估计的q 轴电流经带通滤波器滤波,并乘解调项,滤掉2倍频信号可得
(4) $f\left( {{\theta }_{est}} \right)=LPF\left( {{i}_{qinest}}\sin \left( {{\omega }_{in}}t \right) \right)=\frac{{{u}_{in}}\Delta L}{2{{\omega }_{in}}\left( \Sigma {{L}^{2}}-\Delta {{L}^{2}} \right)}\sin 2{{\theta }_{est}}$
当θest 趋近于零时,对sin2θest 进行泰勒展开,化简得到式(5)
(5) $f\left( {{\theta }_{est}} \right)=LPF\left( {{i}_{qinest}}\sin \left( {{\omega }_{in}}t \right) \right)\approx \frac{{{u}_{in}}\left( {{L}_{q}}-{{L}_{d}} \right)}{2{{\omega }_{in}}{{L}_{q}}{{L}_{d}}}{{\theta }_{est}}$
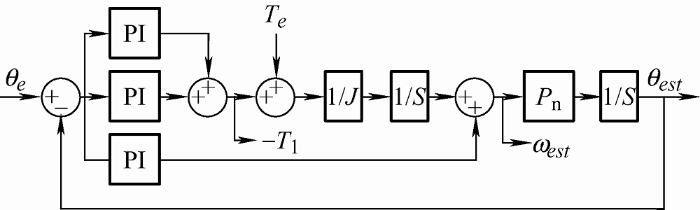
将解调出的信号,输入至如图3 所示的位置跟踪观测器便可以得到估算的角度位置。
图3
由于这种方法需要附加的高频信号,增加了转矩脉动、噪声和损耗,所以采用非注入法的无位置传感器控制。
3 基于非注入法无位置传感器控制
3.1 SVPWM控制算法中的高频电流
空间矢量脉宽调制技术(SVPWM)是针对现有的嵌入式数字控制系统提出的一种提高电压利用率并减小转矩脉动的算法,通过控制开关管的开通和关闭,形成一系列脉冲幅值相同,占空比不同的脉冲方波电压矢量,从而合成控制电机正常运行的电压矢量。产生的脉冲方波矢量相当于第2节所述的高频脉冲作用在电机上,所以不需要外加其他注入信号。
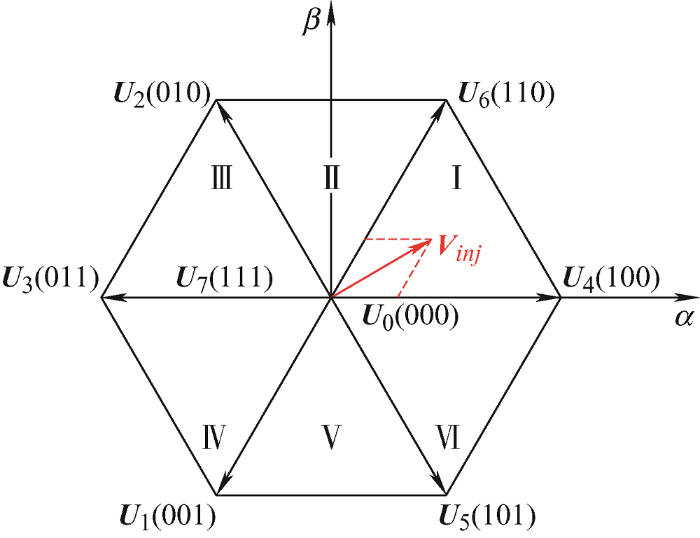
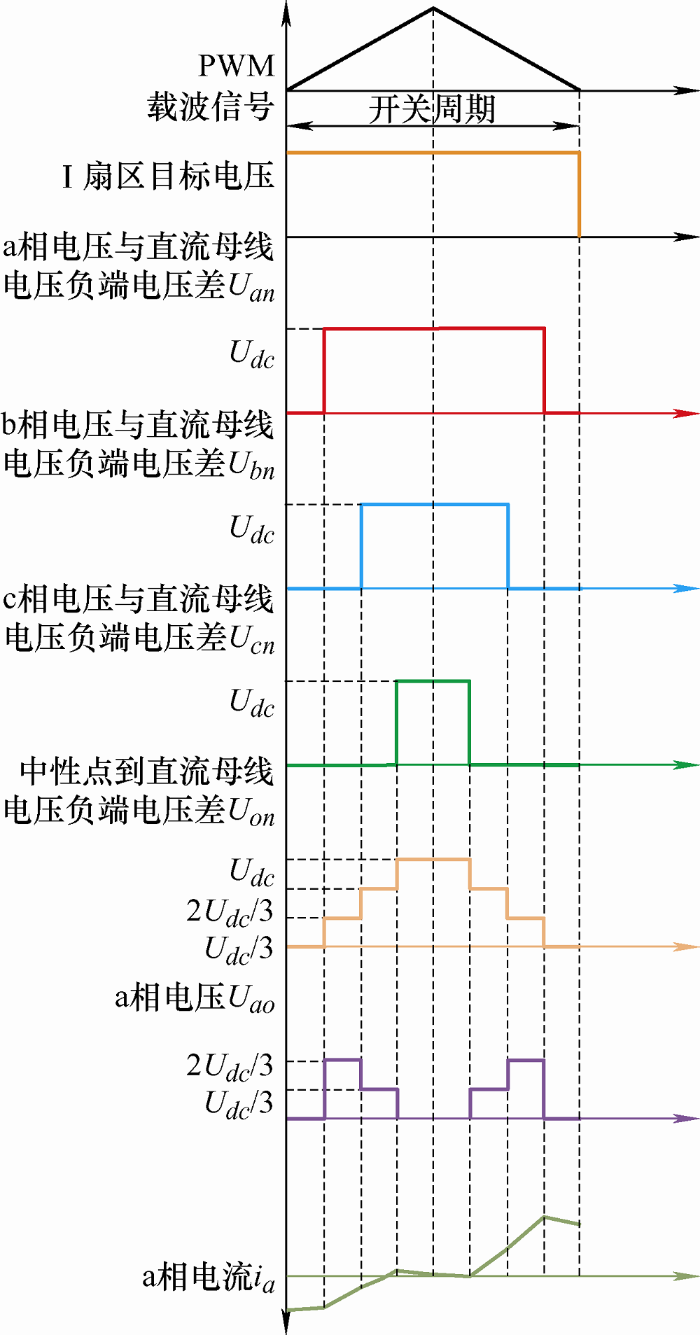
为了减少谐波,开关损耗,以及软件程序控制方便,通过灵活分布零矢量,每次仅改变一次开关,使一个开关周期内PWM波形对称分布,即七段式SVPWM控制算法。具体实现原理为:在一个开关周期内,利用两个相邻的有效电压矢量和两个零电压矢量作用不同时间,使其合成的电压矢量与目标电压矢量相同。例如位于Ⅰ扇区目标电压矢量V inj U 4 、U 6 和零电压矢量U 0 、U 7 在一个开关周期内作用不同时间合成,如图4 所示。
图4
6个基本的有效电压矢量将复平面分为6个扇区,不同扇区所使用的有效矢量不同,但在逆变器的最大限制圆内,每个扇区内的目标矢量的合成都需要零矢量,尤其在轻载以及转速较低时,目标电压矢量较小,零矢量作用时间较长,所以可以检测零电压矢量期间作用在电机上的三相电流,进行角度位置估算。
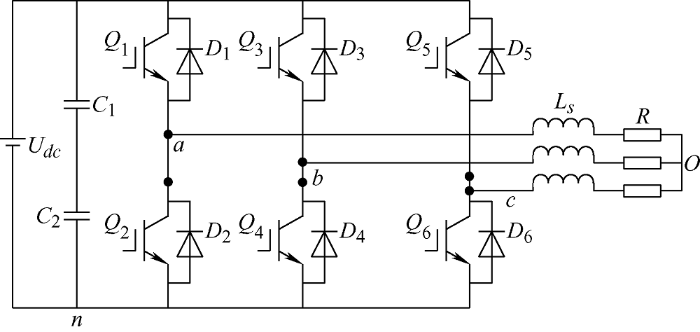
将电机等效为阻感性负载,如图5 所示,为电机逆变器的拓扑结构,电机在零矢量作用期间,abc 三相电路可等效为零输入电路。以Ⅰ扇区为例,如图6 所示,可以得到一个开关周期内abc 三相电压到母线负极的电压U an U bn U cn U on U ao ia ,同理可得bc相电压U bo U co ib 、ic 。由图6 中a相电压U ao [12 ] ,即与电机的角度位置有关。因此,可以通过零检测矢量作用期间的abc三相电流,得到估计的角度位置。
图5
图6
3.2 非注入法的数学模型
非注入法无位置传感器控制的基本原理为在SVPWM控制算法的零电压矢量作用区间内,通过检测abc三相电流计算出导数或是直接检测三相电流导数,通过对包含转子位置信息的虚拟旋转坐标轴系下的d 轴电流导数计算,从而估算出角度位置。
永磁同步电机在实际同步旋转坐标系下的电压方程可以表示为
(6) $\left[ \begin{matrix} {{u}_{d}} \\ {{u}_{q}} \\\end{matrix} \right]=\left[ \begin{matrix} R+p{{L}_{d}} & -{{\omega }_{e}}{{L}_{q}} \\ {{\omega }_{e}}{{L}_{d}} & R+p{{L}_{q}} \\ \end{matrix} \right]\left[ \begin{matrix} {{i}_{d}} \\ {{i}_{q}} \\ \end{matrix} \right]-\left[ \begin{matrix} 0 \\ {{\psi }_{f}}{{\omega }_{e}} \\\end{matrix} \right]$
式中,ud 、uq 分别为d 、q 轴电压;R 为定子电阻;p 为微分算子;Ld 、Lq 分别为d 、q 轴电感;id 、iq 分别为d 、q 轴电流;ωe 为转速;Ψf 为磁链。
在零电压矢量作用区间内[4 ⇓ -6 ,8 ] ,电机端电压为零,ud =uq =0,由式(6)可以改写成式(7)
(7) $\left[ \begin{matrix} \frac{d{{i}_{d}}}{dt} \\ \frac{d{{i}_{q}}}{dt} \\\end{matrix} \right]=\left[ \begin{matrix} -\frac{R}{{{L}_{d}}} & \frac{{{L}_{d}}}{{{L}_{q}}}{{\omega }_{e}} \\ -\frac{{{L}_{d}}}{{{L}_{q}}}{{\omega }_{e}} & \frac{R}{{{L}_{q}}} \\ \end{matrix} \right]\left[ \begin{matrix} {{i}_{d}} \\ {{i}_{q}} \\ \end{matrix} \right]-\left[ \begin{matrix} 0 \\ \frac{{{\psi }_{f}}{{\omega }_{e}}}{{{L}_{q}}} \\ \end{matrix} \right]$
估计轴系下的d 、q 轴电流导数可以简化为式(8)[4 ] 。
(8) $\left\{ \begin{align} & \frac{d{{i}_{dinest}}}{dt}=\frac{R}{{{L}_{d}}{{L}_{q}}}\left[ \left\{ \left( {{L}_{d}}-{{L}_{q}} \right){{\cos }^{2}}{{\theta }_{err}}-{{L}_{d}} \right\}{{i}_{dinest}}-\frac{1}{2}\left( {{L}_{d}}-{{L}_{q}} \right)\sin 2{{\theta }_{err}}\times {{i}_{qinest}} \right]-\frac{{{\psi }_{f}}{{\omega }_{e}}}{{{L}_{q}}}\sin {{\theta }_{err}} \\ & \frac{d{{i}_{qinest}}}{dt}=-\frac{R}{{{L}_{d}}{{L}_{q}}}\left[ \left\{ \left( {{L}_{d}}-{{L}_{q}} \right){{\cos }^{2}}{{\theta }_{err}}+{{L}_{q}} \right\}{{i}_{qinest}}+\frac{1}{2}\left( {{L}_{d}}-{{L}_{q}} \right)\sin 2{{\theta }_{err}}\times {{i}_{dinest}} \right]-\frac{{{\psi }_{f}}{{\omega }_{e}}}{{{L}_{q}}}\cos {{\theta }_{err}} \\ \end{align} \right.$
式中,didinest /dt 、diqinest /dt 分别为估算轴系下的d 、q 轴电流导数。
由式(8)可知,该方法综合考虑了电机的凸极性以及反电势两个因素,相对高频注入法仅利用电机的凸极性而忽略反电势的影响,在数学模型上建模更加准确。另外,从式(8)中可以得出,角度误差与估计轴系下的d 、q 轴电流idinest 、iqinest ,d 、q 轴电流导数didinest /dt 、diqinest /dt 以及转速ωe 有关。
由于d-q 轴电流导数方程分析方法一致,本文仅对用d 轴电流导数估计角度位置进行分析。
当转子位置误差趋近于零时,三角函数可做如式(9)所示简化
(9) $\cos {{\theta }_{err}}\to 1$ $\sin 2{{\theta }_{err}}\to 2{{\theta }_{err}}$
(10) $\frac{d{{i}_{dest}}}{dt}=-\frac{R}{{{L}_{d}}}{{i}_{dest}}-\left( \frac{R\left( {{L}_{d}}-{{L}_{q}} \right)}{{{L}_{d}}{{L}_{q}}}{{i}_{qest}}+\frac{{{\psi }_{f}}{{\omega }_{r}}}{{{L}_{q}}} \right){{\theta }_{err}}$
当转子位置误差等于零时,式(10)简化为式(11)
(11) $\frac{d{{i}_{dest}}}{dt}=-\frac{R}{{{L}_{d}}}{{i}_{dest}}$
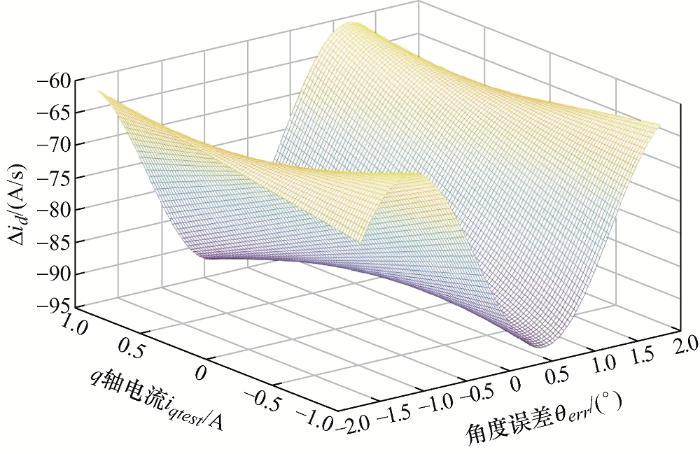
式(10)展示了估计轴系的d 轴电流导数与角度误差的关系,但关系受工况(d 、q 轴电流以及转速)的影响。图7 展示了在静止状态下,d 轴电流为0 A时,估计d 轴电流导数与q 轴电流,角度误差的关系。
由图7 和式(11)可知,虽然工况对角度位置的收敛速度影响,当角度误差收敛为0时,估计d 轴电流导数固定,所以可以通过控制估计d 轴电流导数的实际值与估计值误差为零,实现角度位置的估算。
图7
图7
估计轴系下的d 轴导数、q 轴电流和角度误差的关系
另外,由式(11)可知,当角度误差θerr =0时,估计轴系的d 轴电流导数仅与定子电阻、d 轴电感和估计的d 轴电流有关,且要求保持d 轴电流为一不为零的常数。
3.3 零矢量区间内转子位置信息提取方法
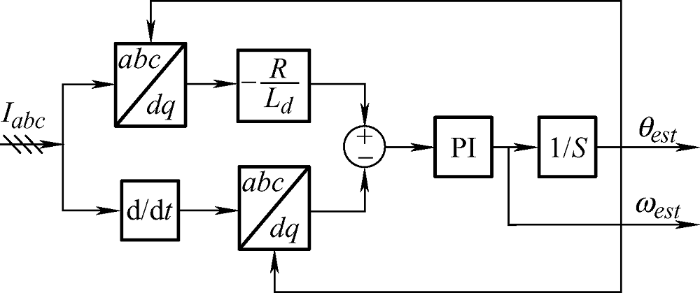
因此,利用式(11)来搭建转子位置检测模块,该检测模块通过模拟三相电流导数的采样,并将该采样信号经过旋转变换,转换到估计d 、q 轴系下,再将得到的d 轴电流导数与角度误差为零时计算得到的d 轴电流导数比较,得到d 轴电流导数实际值与估计值误差值,通过PI调节,实现角度位置闭环。
当实际的d 轴导数收敛至计算的d 轴电流导数时,电机的实际电角度与估计电角度误差收敛至零,其原理框图如图8 所示。
图8
4 仿真结果分析
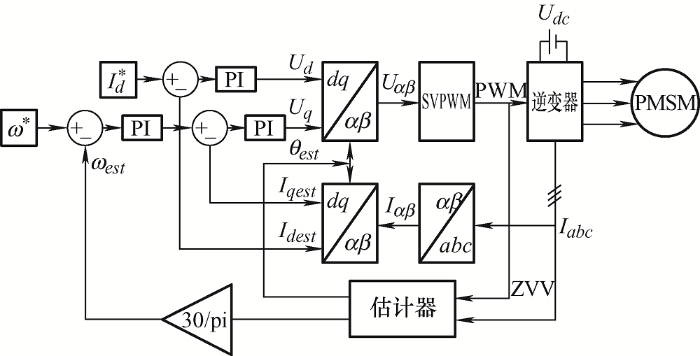
根据表1 所示的永磁同步电机参数,搭建零电压矢量作用区间内,基于非注入法的转子位置估计控制系统结构框图如图9 所示。
图9
图9
基于非注入法在零矢量区间的转子位置估计控制系统结构框图
电机的稳态响应和动态响应都是考核控制系统的重要指标,无位置传感器控制由于位置信息完全由电流和电压信息计算得出,所以其阶跃响应,带载起动能力,以及不同初始位置角起动均显示无位置传感器控制的动态收敛特性。
4.1 转速阶跃仿真
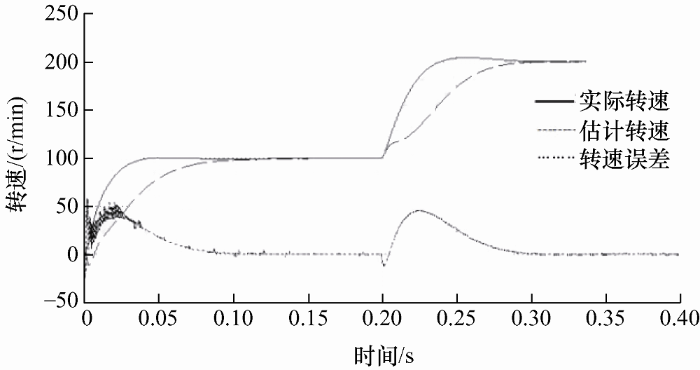
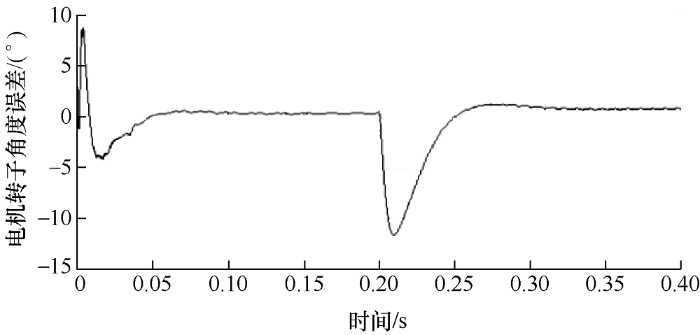
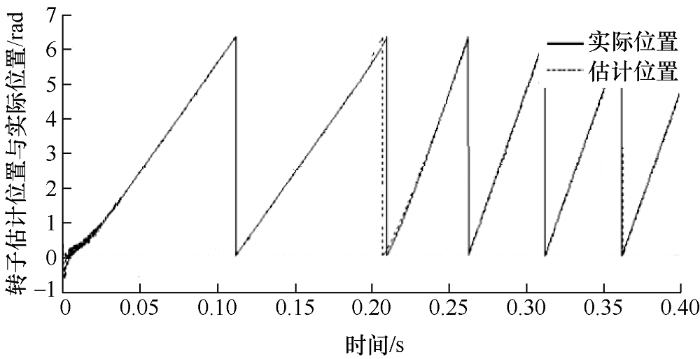
为了验证此控制算法的转速阶跃情况下的动态响应,初始给定转速为100 r/min,在t =0.2 s时转速阶跃至200 r/min,得到的转速误差和角度误差如图10 和图11 所示,电机转子估计位置与实际位置关系如图12 所示。
图10
图10
转速阶跃情况下的实际转速、估计转速、转速误差
图11
图12
仿真结果表明,在t =0.2 s进行转速阶跃后,在0.1 s内位置收敛稳定,对速度突变能快速响应,收敛至转子位置误差小于1°,具有良好的稳态跟踪性能。
4.2 带载起动仿真
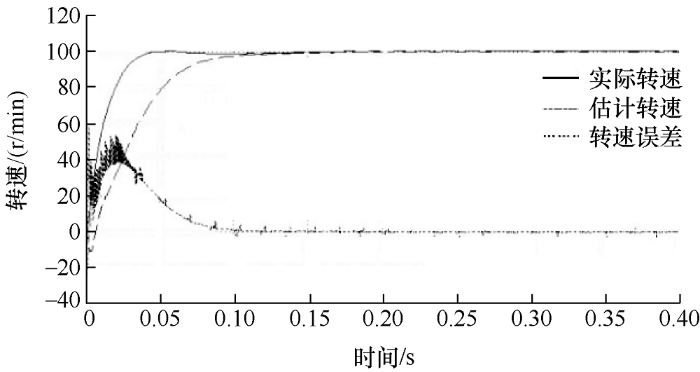
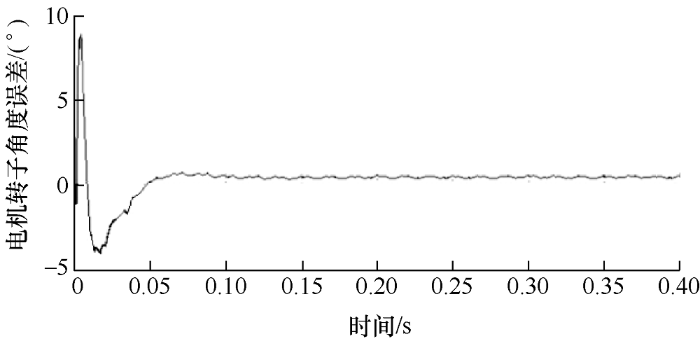
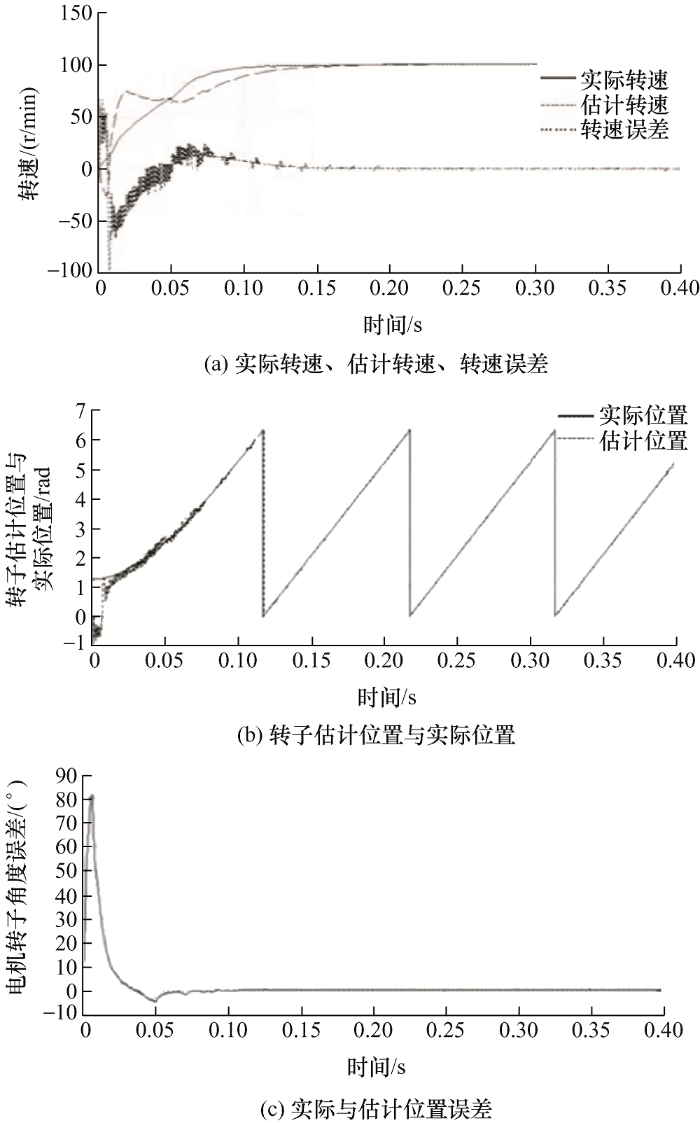
为验证此算法在低速段的稳态跟踪和动态带载起动性能,给定负载转矩为10 N·m,给定转速为100 r/min,并设置d 轴给定电流为-5 A,得到转速误差和角度误差分别如图13 和图14 所示。
图13
图14
仿真结果表明,在负载转矩为10 N·m情况下,进行零速带载起动,在t =0.1 s时,达到给定转速,动态响应迅速;在t =0.05 s时,位置收敛稳定,位置误差约为0.4°,稳态跟踪性能良好。
4.3 不同初始位置角起动仿真
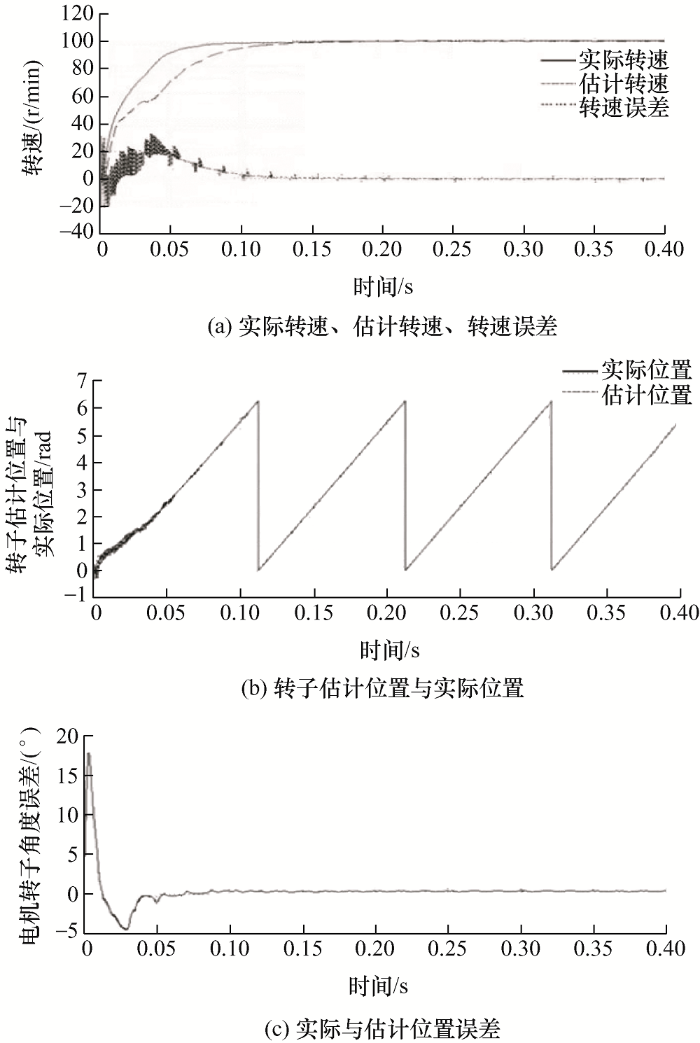
为了验证此控制算法的不同初始位置角起动情况下的收敛特性,初始给定转速为100 r/min,在电机初始角度分别30°、60°和90°时电机转子位置的检测结果。
其中,初始角度为30°时得到的检测结果分别如图15 a、15b、15c所示。仿真结果表明,当电机初始电角度为30°时,与初始电角度为0°时相比,动态响应速度略受到影响,稳态精度几乎不变。转速约在t =0.15 s时达到稳定,相比初始电角度为0°时进入稳态运行时间延迟了0.05 s,电机约在t =0.08 s跟踪上转子的实际位置,转子误差约为0.5°。
图15
其中,初始角度为60°时得到的检测结果分别如图16 a、16b、16c所示。仿真结果表明,当电机初始电角度为60°时,与初始电角度为30°时相比,转速约在t =0.17 s时达到稳定,电机约在t =0.08 s跟踪上转子的实际位置,转子误差约为0.5°。
图16
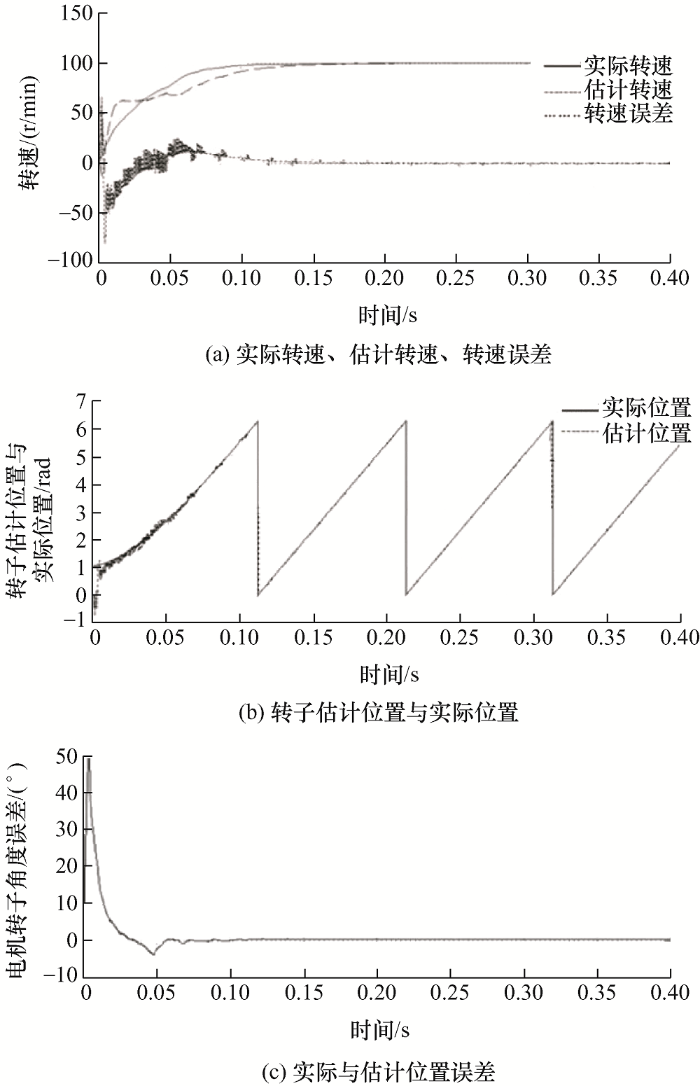
其中,初始角度为90°时得到的检测结果分别如图17 a、17b、17c所示。仿真结果表明,当电机初始电角度为90°时,转速约在t =0.17 s时达到稳定,电机约在t =0.08 s跟踪上转子的实际位置,稳态时转子误差约为0.5°。
图17
由此可以验证此算法能够在电机位置偏离初始位置较大范围内均能满足动态响应性能和稳态精度要求。
5 结论
本文主要研究并实现了一种无需注入任何外加信号,仅需要检测零电压矢量作用期间的d 轴电流斜率,便能估计转子位置的无位置传感器算法。研究表明如下结论。
(1) 本研究在零电压矢量作用区间内,通过对估计旋转轴系下的永磁同步电机方程进行推导,得出d 轴电流导数与电机转子位置的关系,验证了通过d 轴电流导数检测转子位置的可行性。
(2) 相较于传统的注入法无位置传感器控制策略,本研究能够在不需额外注入高频信号的情况下检测出电机转子位置信息,解决了注入法引起的噪声和损耗问题。
(3) 该控制方法在转速突变、带载起动以及不同初始位置角起动过程中,动态响应迅速,在低速段稳态运行范围内,角度位置跟踪精确。
参考文献
View Option
[1]
ZHAN H ZHU Z Q MILIJANA O . Nonparametric sensorless drive method for open-winding PMSM based on zero-sequence back EMF with circulating current suppression
[J]. IEEE Transactions on Power Electronics , 2017 , 32 (5 ):3808 -3817 .
DOI:10.1109/TPEL.2016.2592480
URL
[本文引用: 1]
[2]
LUO Xin TANG Qipeng SHEN Anwen , et al . A combining FPE and additional test vectors hybrid strategy for IPMSM sensorless control
[J]. IEEE Transactions on Power Electronics , 2018 , 33 (7 ):6104 -6113 .
DOI:10.1109/TPEL.2017.2743106
URL
[本文引用: 1]
[3]
BUI M X GUAN D XIAO D , et al . A modified sensorless control scheme for interior permanent magnet synchronous motor over zero to rated speed range using current derivative measurements
[J]. IEEE Transactions on Industrial Electronics , 2019 , 66 (1 ):102 -113 .
DOI:10.1109/TIE.2018.2823663
URL
[本文引用: 2]
[4]
RAUTE R CARUANA C CILIA J , et al . A zero speed operation sensorless PMSM drive without additional test signal injection [C]// 2007 European Conference on Power Electronics and Applications,Aalborg, 2007 :1 -10 .
[本文引用: 4]
[5]
HOSOGAYA Y J HISAO K . Position estimating method of IPMSM at low speed region using dq-axis current derivative without high frequency component [C]//2013 IEEE 10th International Conference on Power Electronics and Drive Systems,Kitakyushu, 2013 :1306 -1311 .
[本文引用: 4]
[6]
WANG Gaolin KUANG Junyao ZHAO Nannan , et al . Rotor position estimation of PMSM in low speed region and standstill using zero voltage vector injection
[J]. IEEE Transactions on Power Electronics , 2017 , 33 (9 ):8885 -8993 .
[本文引用: 2]
[7]
WANG Gaolin XIAO Dianxun ZHAO Nannan , et al . Low-frequency pulse voltage injection scheme based sensorless control of IPMSM drives for audible noise reduction
[J]. IEEE Transactions on Industrial Electronics , 2017 , 64 (11 ):8415 -8426 .
DOI:10.1109/TIE.2017.2703875
URL
[本文引用: 2]
[8]
匡俊耀 . 基于零矢量电流微分的永磁电机转子位置估计方法研究 [D]. 哈尔滨 : 哈尔滨工业大学 , 2018 .
[本文引用: 3]
KUANG Junyao . Research on permanent magnet motor rotor position estimation method based on zero vector current differentiation [D]. Harbin : Harbin Institute of Technology , 2018 .
[本文引用: 3]
[9]
QIAO Zhaowei SHI Tingna WANG Yindong , et al . New sliding-mode observer for position sensorless control of permanent-magnet synchronous motor
[J]. IEEE Transactions on Industrial Electronics , 2013 , 60 (2 ):710 -719 .
DOI:10.1109/TIE.2012.2206359
URL
[本文引用: 1]
[10]
ORLOWSKA-KOWALSKA T KORZONEK M TARCHALA G . Stability improvement methods of the adaptive full-order observer for sensorless induction motor drive—Comparative study
[J]. IEEE Transactions on Industrial Informatics , 2019 , 15 (11 ):6114 -6126 .
DOI:10.1109/TII.2019.2930465
URL
[本文引用: 1]
[11]
邵俊波 , 王辉 , 黄守道 . 一种表贴式永磁同步电机无位置传感器低速控制策略
[J]. 中国电机工程学报 , 2018 , 38 (5 ):1534 -1541 .
[本文引用: 3]
SHAO Junbo WANG Hui HUANG Shoudao . A position sensorless low-speed control strategy for surface-mount permanent magnet synchronous motors
[J]. Proceedings of the CSEE , 2018 , 38 (5 ):1534 -1541 .
[本文引用: 3]
[12]
XIAO Huiwen ZHAO Feng WANG Haibo , et al . Analysis of high frequency current at the sampling instant of SPMSM based on high frequency signal injection method [C]//2019 IEEE 3rd International Electrical and Energy Conference (CIEEC),Beijing,China, 2019 :462 -467 .
[本文引用: 2]
[13]
吴少风 , 单忠 . 基于脉振高频方波注入的永磁同步电机无位置传感器磁场定向控制
[J]. 电机与控制应用 , 2020 , 47 (1 ):41 -47 .
[本文引用: 1]
WU Shaofeng SHAN Zhong . Sensorless field oriented control of permanent magnet synchronous motor based on pulse vibration high-frequency square wave injection
[J]. Motor and Control Applications , 2020 , 47 (1 ):41 -47 .
[本文引用: 1]
[14]
宋同月 , 颜建虎 , 应展烽 , 等 . 基于脉振高频注入法的零低速永磁直线同步电机无位置传感器控制
[J]. 电机与控制应用 , 2020 , 47 (11 ):10 -17 ,24.
[本文引用: 1]
SONG Tongyue YAN Jianhu YING Zhanfeng , et al . Sensorless control of zero-low-speed permanent magnet linear synchronous motor based on pulse vibration high-frequency injection method
[J]. Electric Machines and Control Application , 2020 , 47 (11 ):10 -17 ,24.
[本文引用: 1]
[15]
MEDJMADJ S DIALLO D MOSTEFAI M , et al . PMSM drive position estimation:Contribution to the high-frequency injection voltage selection issue
[J]. IEEE Transactions on Energy Conversion , 2015 , 30 (1 ):349 -358 .
DOI:10.1109/TEC.2014.2354075
URL
[本文引用: 1]
[16]
WANG Gaolin YANG Lei ZHANG Guoqiang , et al . Comparative investigation of pseudo-random high frequency signal injection schemes for sensorless IPMSM drives
[J]. IEEE Transactions on Power Electronics , 2017 , 32 (3 ):2123 -2132 .
DOI:10.1109/TPEL.2016.2569418
URL
[本文引用: 1]
Nonparametric sensorless drive method for open-winding PMSM based on zero-sequence back EMF with circulating current suppression
1
2017
... 永磁同步电机因其功率密度大、噪声低、效率高等优点,被广泛应用于各个领域,包括机器人、家用电器等领域[1 ⇓ -3 ] .为了对永磁同步电机进行精准控制,需要精确的角度位置信号,通常通过旋转变压器等位置传感器采集位置信号,但是位置传感器存在成本高、易受干扰且安装维护困难等问题[4 ⇓ ⇓ ⇓ -8 ] ,所以学者们提出了无位置传感器控制技术. ...
A combining FPE and additional test vectors hybrid strategy for IPMSM sensorless control
1
2018
... 永磁同步电机因其功率密度大、噪声低、效率高等优点,被广泛应用于各个领域,包括机器人、家用电器等领域[1 ⇓ -3 ] .为了对永磁同步电机进行精准控制,需要精确的角度位置信号,通常通过旋转变压器等位置传感器采集位置信号,但是位置传感器存在成本高、易受干扰且安装维护困难等问题[4 ⇓ ⇓ ⇓ -8 ] ,所以学者们提出了无位置传感器控制技术. ...
A modified sensorless control scheme for interior permanent magnet synchronous motor over zero to rated speed range using current derivative measurements
2
2019
... 永磁同步电机因其功率密度大、噪声低、效率高等优点,被广泛应用于各个领域,包括机器人、家用电器等领域[1 ⇓ -3 ] .为了对永磁同步电机进行精准控制,需要精确的角度位置信号,通常通过旋转变压器等位置传感器采集位置信号,但是位置传感器存在成本高、易受干扰且安装维护困难等问题[4 ⇓ ⇓ ⇓ -8 ] ,所以学者们提出了无位置传感器控制技术. ...
... 在电机控制中,常用空间矢量脉宽调制技术(Space vector pulse width modulation, SVPWM)产生开关管驱动信号,SVPWM是在一个开关周期内,通过一系列幅值相同占空比不同的脉冲方波矢量合成目标电压矢量,从而对电机进行有效调制.脉冲方波矢量相当于高频脉冲作用在电机上,所以不需要外加注入信号,仅通过检测脉冲方波矢量作用区间内的高频电流微分[3 ⇓ -5 ] ,便能计算出角度位置,减少了噪声和损耗,并且在提取位置信息信号时减少了高频信号提取过程中滤波器的使用,减少延迟. ...
4
2007
... 永磁同步电机因其功率密度大、噪声低、效率高等优点,被广泛应用于各个领域,包括机器人、家用电器等领域[1 ⇓ -3 ] .为了对永磁同步电机进行精准控制,需要精确的角度位置信号,通常通过旋转变压器等位置传感器采集位置信号,但是位置传感器存在成本高、易受干扰且安装维护困难等问题[4 ⇓ ⇓ ⇓ -8 ] ,所以学者们提出了无位置传感器控制技术. ...
... 在电机控制中,常用空间矢量脉宽调制技术(Space vector pulse width modulation, SVPWM)产生开关管驱动信号,SVPWM是在一个开关周期内,通过一系列幅值相同占空比不同的脉冲方波矢量合成目标电压矢量,从而对电机进行有效调制.脉冲方波矢量相当于高频脉冲作用在电机上,所以不需要外加注入信号,仅通过检测脉冲方波矢量作用区间内的高频电流微分[3 ⇓ -5 ] ,便能计算出角度位置,减少了噪声和损耗,并且在提取位置信息信号时减少了高频信号提取过程中滤波器的使用,减少延迟. ...
... 在零电压矢量作用区间内[4 ⇓ -6 ,8 ] ,电机端电压为零,ud =uq =0,由式(6)可以改写成式(7) ...
... 估计轴系下的d 、q 轴电流导数可以简化为式(8)[4 ] . ...
4
2013
... 永磁同步电机因其功率密度大、噪声低、效率高等优点,被广泛应用于各个领域,包括机器人、家用电器等领域[1 ⇓ -3 ] .为了对永磁同步电机进行精准控制,需要精确的角度位置信号,通常通过旋转变压器等位置传感器采集位置信号,但是位置传感器存在成本高、易受干扰且安装维护困难等问题[4 ⇓ ⇓ ⇓ -8 ] ,所以学者们提出了无位置传感器控制技术. ...
... 低速段的常用方法为高频注入法[11 -12 ] ,高频注入法通过外加高频电压或电流[13 ] ,解调出包含转子位置信息的高频电流或电压,进而得到准确的角度位置信息,这种方法在低速段估算准确[14 ⇓ -16 ] ,但附加的高频信号增加了转矩脉动、噪声和损耗[5 ] ,且用于信号提取的滤波环节影响电机动态性能,还需要额外的极性辨识,否则电机带载起动失败或反转[7 -8 ] . ...
... 在电机控制中,常用空间矢量脉宽调制技术(Space vector pulse width modulation, SVPWM)产生开关管驱动信号,SVPWM是在一个开关周期内,通过一系列幅值相同占空比不同的脉冲方波矢量合成目标电压矢量,从而对电机进行有效调制.脉冲方波矢量相当于高频脉冲作用在电机上,所以不需要外加注入信号,仅通过检测脉冲方波矢量作用区间内的高频电流微分[3 ⇓ -5 ] ,便能计算出角度位置,减少了噪声和损耗,并且在提取位置信息信号时减少了高频信号提取过程中滤波器的使用,减少延迟. ...
... 在零电压矢量作用区间内[4 ⇓ -6 ,8 ] ,电机端电压为零,ud =uq =0,由式(6)可以改写成式(7) ...
Rotor position estimation of PMSM in low speed region and standstill using zero voltage vector injection
2
2017
... 永磁同步电机因其功率密度大、噪声低、效率高等优点,被广泛应用于各个领域,包括机器人、家用电器等领域[1 ⇓ -3 ] .为了对永磁同步电机进行精准控制,需要精确的角度位置信号,通常通过旋转变压器等位置传感器采集位置信号,但是位置传感器存在成本高、易受干扰且安装维护困难等问题[4 ⇓ ⇓ ⇓ -8 ] ,所以学者们提出了无位置传感器控制技术. ...
... 在零电压矢量作用区间内[4 ⇓ -6 ,8 ] ,电机端电压为零,ud =uq =0,由式(6)可以改写成式(7) ...
Low-frequency pulse voltage injection scheme based sensorless control of IPMSM drives for audible noise reduction
2
2017
... 永磁同步电机因其功率密度大、噪声低、效率高等优点,被广泛应用于各个领域,包括机器人、家用电器等领域[1 ⇓ -3 ] .为了对永磁同步电机进行精准控制,需要精确的角度位置信号,通常通过旋转变压器等位置传感器采集位置信号,但是位置传感器存在成本高、易受干扰且安装维护困难等问题[4 ⇓ ⇓ ⇓ -8 ] ,所以学者们提出了无位置传感器控制技术. ...
... 低速段的常用方法为高频注入法[11 -12 ] ,高频注入法通过外加高频电压或电流[13 ] ,解调出包含转子位置信息的高频电流或电压,进而得到准确的角度位置信息,这种方法在低速段估算准确[14 ⇓ -16 ] ,但附加的高频信号增加了转矩脉动、噪声和损耗[5 ] ,且用于信号提取的滤波环节影响电机动态性能,还需要额外的极性辨识,否则电机带载起动失败或反转[7 -8 ] . ...
3
2018
... 永磁同步电机因其功率密度大、噪声低、效率高等优点,被广泛应用于各个领域,包括机器人、家用电器等领域[1 ⇓ -3 ] .为了对永磁同步电机进行精准控制,需要精确的角度位置信号,通常通过旋转变压器等位置传感器采集位置信号,但是位置传感器存在成本高、易受干扰且安装维护困难等问题[4 ⇓ ⇓ ⇓ -8 ] ,所以学者们提出了无位置传感器控制技术. ...
... 低速段的常用方法为高频注入法[11 -12 ] ,高频注入法通过外加高频电压或电流[13 ] ,解调出包含转子位置信息的高频电流或电压,进而得到准确的角度位置信息,这种方法在低速段估算准确[14 ⇓ -16 ] ,但附加的高频信号增加了转矩脉动、噪声和损耗[5 ] ,且用于信号提取的滤波环节影响电机动态性能,还需要额外的极性辨识,否则电机带载起动失败或反转[7 -8 ] . ...
... 在零电压矢量作用区间内[4 ⇓ -6 ,8 ] ,电机端电压为零,ud =uq =0,由式(6)可以改写成式(7) ...
3
2018
... 永磁同步电机因其功率密度大、噪声低、效率高等优点,被广泛应用于各个领域,包括机器人、家用电器等领域[1 ⇓ -3 ] .为了对永磁同步电机进行精准控制,需要精确的角度位置信号,通常通过旋转变压器等位置传感器采集位置信号,但是位置传感器存在成本高、易受干扰且安装维护困难等问题[4 ⇓ ⇓ ⇓ -8 ] ,所以学者们提出了无位置传感器控制技术. ...
... 低速段的常用方法为高频注入法[11 -12 ] ,高频注入法通过外加高频电压或电流[13 ] ,解调出包含转子位置信息的高频电流或电压,进而得到准确的角度位置信息,这种方法在低速段估算准确[14 ⇓ -16 ] ,但附加的高频信号增加了转矩脉动、噪声和损耗[5 ] ,且用于信号提取的滤波环节影响电机动态性能,还需要额外的极性辨识,否则电机带载起动失败或反转[7 -8 ] . ...
... 在零电压矢量作用区间内[4 ⇓ -6 ,8 ] ,电机端电压为零,ud =uq =0,由式(6)可以改写成式(7) ...
New sliding-mode observer for position sensorless control of permanent-magnet synchronous motor
1
2013
... 无位置传感器控制技术是一种转子位置自检测的技术,无需利用任何位置传感器,本质是基于电机的数学模型,通过检测包含电机转子的凸极性的电流或电压信号,或是估算电机反电势(反电势法),从而进行角度位置估算.国内外学者针对“反电势法”已经进行了深入研究,包含滑模观测器法[9 ] 、状态观测器法[10 ] 等,目前主要应用于高速段.但是速度较低时,反电势较小,角度位置难以通过“反电势法”获得,所以低速段一般通过检测电机转子的凸极性来进行角度位置估算. ...
Stability improvement methods of the adaptive full-order observer for sensorless induction motor drive—Comparative study
1
2019
... 无位置传感器控制技术是一种转子位置自检测的技术,无需利用任何位置传感器,本质是基于电机的数学模型,通过检测包含电机转子的凸极性的电流或电压信号,或是估算电机反电势(反电势法),从而进行角度位置估算.国内外学者针对“反电势法”已经进行了深入研究,包含滑模观测器法[9 ] 、状态观测器法[10 ] 等,目前主要应用于高速段.但是速度较低时,反电势较小,角度位置难以通过“反电势法”获得,所以低速段一般通过检测电机转子的凸极性来进行角度位置估算. ...
一种表贴式永磁同步电机无位置传感器低速控制策略
3
2018
... 低速段的常用方法为高频注入法[11 -12 ] ,高频注入法通过外加高频电压或电流[13 ] ,解调出包含转子位置信息的高频电流或电压,进而得到准确的角度位置信息,这种方法在低速段估算准确[14 ⇓ -16 ] ,但附加的高频信号增加了转矩脉动、噪声和损耗[5 ] ,且用于信号提取的滤波环节影响电机动态性能,还需要额外的极性辨识,否则电机带载起动失败或反转[7 -8 ] . ...
... 在电机起动过程中,由于电机运行速度较低,反电势小,若利用反电势法来估计转子位置信息,角度位置估算不准确.所以利用转子凸极性进行角度位置跟踪.这种方法主要是通过向控制系统中注入高频信号,电机会响应出与转子位置信息相关的信号,对此信号进行解调,便能够得出相应的角度位置,本文以脉振高频信号注入法[11 ] 为例,对此方法的原理进行分析,整体控制框图如图1 所示. ...
... 该方法是向d 、q 轴中的某一个坐标轴注入高频正弦信号,信号可以是电压,也可以是电流,为了减少转矩脉动和增加电流调节器带宽,一般选择在d 轴上注入电压信号[11 ] ,通过滤波器提取高频电流信号,并根据公式解调高频电流信号,经过位置跟踪观测器,并能得出准确的角度位置. ...
A position sensorless low-speed control strategy for surface-mount permanent magnet synchronous motors
3
2018
... 低速段的常用方法为高频注入法[11 -12 ] ,高频注入法通过外加高频电压或电流[13 ] ,解调出包含转子位置信息的高频电流或电压,进而得到准确的角度位置信息,这种方法在低速段估算准确[14 ⇓ -16 ] ,但附加的高频信号增加了转矩脉动、噪声和损耗[5 ] ,且用于信号提取的滤波环节影响电机动态性能,还需要额外的极性辨识,否则电机带载起动失败或反转[7 -8 ] . ...
... 在电机起动过程中,由于电机运行速度较低,反电势小,若利用反电势法来估计转子位置信息,角度位置估算不准确.所以利用转子凸极性进行角度位置跟踪.这种方法主要是通过向控制系统中注入高频信号,电机会响应出与转子位置信息相关的信号,对此信号进行解调,便能够得出相应的角度位置,本文以脉振高频信号注入法[11 ] 为例,对此方法的原理进行分析,整体控制框图如图1 所示. ...
... 该方法是向d 、q 轴中的某一个坐标轴注入高频正弦信号,信号可以是电压,也可以是电流,为了减少转矩脉动和增加电流调节器带宽,一般选择在d 轴上注入电压信号[11 ] ,通过滤波器提取高频电流信号,并根据公式解调高频电流信号,经过位置跟踪观测器,并能得出准确的角度位置. ...
2
2019
... 低速段的常用方法为高频注入法[11 -12 ] ,高频注入法通过外加高频电压或电流[13 ] ,解调出包含转子位置信息的高频电流或电压,进而得到准确的角度位置信息,这种方法在低速段估算准确[14 ⇓ -16 ] ,但附加的高频信号增加了转矩脉动、噪声和损耗[5 ] ,且用于信号提取的滤波环节影响电机动态性能,还需要额外的极性辨识,否则电机带载起动失败或反转[7 -8 ] . ...
... 将电机等效为阻感性负载,如图5 所示,为电机逆变器的拓扑结构,电机在零矢量作用期间,abc 三相电路可等效为零输入电路.以Ⅰ扇区为例,如图6 所示,可以得到一个开关周期内abc 三相电压到母线负极的电压U an U bn U cn U on U ao ia ,同理可得bc相电压U bo U co ib 、ic .由图6 中a相电压U ao [12 ] ,即与电机的角度位置有关.因此,可以通过零检测矢量作用期间的abc三相电流,得到估计的角度位置. ...
基于脉振高频方波注入的永磁同步电机无位置传感器磁场定向控制
1
2020
... 低速段的常用方法为高频注入法[11 -12 ] ,高频注入法通过外加高频电压或电流[13 ] ,解调出包含转子位置信息的高频电流或电压,进而得到准确的角度位置信息,这种方法在低速段估算准确[14 ⇓ -16 ] ,但附加的高频信号增加了转矩脉动、噪声和损耗[5 ] ,且用于信号提取的滤波环节影响电机动态性能,还需要额外的极性辨识,否则电机带载起动失败或反转[7 -8 ] . ...
Sensorless field oriented control of permanent magnet synchronous motor based on pulse vibration high-frequency square wave injection
1
2020
... 低速段的常用方法为高频注入法[11 -12 ] ,高频注入法通过外加高频电压或电流[13 ] ,解调出包含转子位置信息的高频电流或电压,进而得到准确的角度位置信息,这种方法在低速段估算准确[14 ⇓ -16 ] ,但附加的高频信号增加了转矩脉动、噪声和损耗[5 ] ,且用于信号提取的滤波环节影响电机动态性能,还需要额外的极性辨识,否则电机带载起动失败或反转[7 -8 ] . ...
基于脉振高频注入法的零低速永磁直线同步电机无位置传感器控制
1
2020
... 低速段的常用方法为高频注入法[11 -12 ] ,高频注入法通过外加高频电压或电流[13 ] ,解调出包含转子位置信息的高频电流或电压,进而得到准确的角度位置信息,这种方法在低速段估算准确[14 ⇓ -16 ] ,但附加的高频信号增加了转矩脉动、噪声和损耗[5 ] ,且用于信号提取的滤波环节影响电机动态性能,还需要额外的极性辨识,否则电机带载起动失败或反转[7 -8 ] . ...
Sensorless control of zero-low-speed permanent magnet linear synchronous motor based on pulse vibration high-frequency injection method
1
2020
... 低速段的常用方法为高频注入法[11 -12 ] ,高频注入法通过外加高频电压或电流[13 ] ,解调出包含转子位置信息的高频电流或电压,进而得到准确的角度位置信息,这种方法在低速段估算准确[14 ⇓ -16 ] ,但附加的高频信号增加了转矩脉动、噪声和损耗[5 ] ,且用于信号提取的滤波环节影响电机动态性能,还需要额外的极性辨识,否则电机带载起动失败或反转[7 -8 ] . ...
PMSM drive position estimation:Contribution to the high-frequency injection voltage selection issue
1
2015
... 低速段的常用方法为高频注入法[11 -12 ] ,高频注入法通过外加高频电压或电流[13 ] ,解调出包含转子位置信息的高频电流或电压,进而得到准确的角度位置信息,这种方法在低速段估算准确[14 ⇓ -16 ] ,但附加的高频信号增加了转矩脉动、噪声和损耗[5 ] ,且用于信号提取的滤波环节影响电机动态性能,还需要额外的极性辨识,否则电机带载起动失败或反转[7 -8 ] . ...
Comparative investigation of pseudo-random high frequency signal injection schemes for sensorless IPMSM drives
1
2017
... 低速段的常用方法为高频注入法[11 -12 ] ,高频注入法通过外加高频电压或电流[13 ] ,解调出包含转子位置信息的高频电流或电压,进而得到准确的角度位置信息,这种方法在低速段估算准确[14 ⇓ -16 ] ,但附加的高频信号增加了转矩脉动、噪声和损耗[5 ] ,且用于信号提取的滤波环节影响电机动态性能,还需要额外的极性辨识,否则电机带载起动失败或反转[7 -8 ] . ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}