1 引言
采用岸电电源代替船舶发电机为船用负载供电可以很大程度上减轻靠港船舶对港口环境的污染[1 ⇓ ⇓ -4 ] 。港口的岸电电源可以将陆地电网经过调压、整流、逆变等环节为靠港船舶的负载提供合格的电能,具备较好的经济和环境效益[5 -6 ] 。
为了保证船舶负载的不间断供电,岸电电源与船舶电网存在一个短时并联的过程,该过程主要通过对岸电电源核心装置—逆变器的控制来实现船用负载在船舶电网与岸电电源之间的平滑转移。目前针对该负载转移策略的研究较少。文献[7 ]对逆变器采用P/Q控制,但其输出功率为固定值,在并网前输出电流较大,在并网瞬间容易产生较大功率冲击。文献[8 ]提出一种利用船舶电网与岸电电源电压差实现负载转移的策略,该方法简单易行但需要牺牲一定的电压精度,容易造成输出电能质量不佳。文献[9 ]对逆变器采用Droop控制,通过逐级增大设定功率的方式来主动调节岸电电源输出功率进而实现负载转移,但由于逆变器响应过快的缺点,岸电电源输出功率会出现超调,容易对船舶发电机造成逆功率,威胁系统稳定性。文献[10 ⇓ -12 ]在Droop控制的基础上引入虚拟惯性,使负载转移的过程更加平缓,但其是通过调节发电机的输出功率,岸电按自身输出特性调节输出功率,增加了船侧的操作量。文献[13 ]研究了VSG控制的岸电电源在频率抗扰动性方面的优势,但并未研究船岸间负载转移过程。
综上,现有岸电电源无缝接入策略主要存在以下缺点:① 负载转移的过程中可能出现功率超调,平滑性较差;② 无法直接对岸电电源输出功率进行调节,并网后需要依赖调节船侧发电机功率来实现负载转移,增加了船侧操作量,不利于港口岸电自动化、智能化的实现。
本文对岸电电源采用VSG控制,并提出二段式负载转移策略,使岸电电源先与船舶发电机均分负载功率再达到功率设定值。相比于文献[9 ]逐级切换策略,在能够实现岸电电源功率主动调节的同时,通过参数优化解决了功率超调问题,使发电机能够在正确的时间切除,有利于船舶岸电系统安全稳定运行。
2 基于VSG的岸电电源控制方式
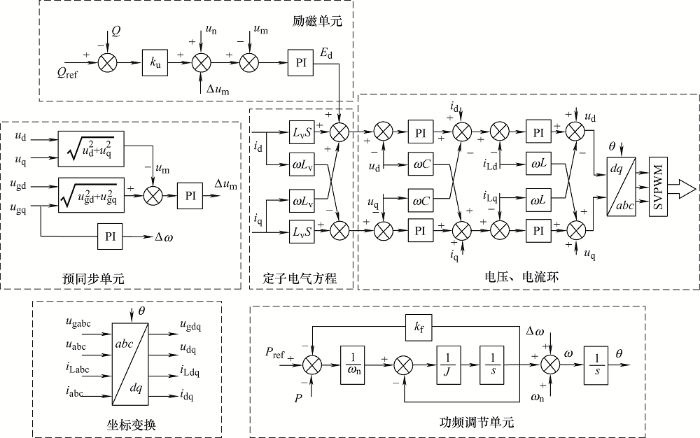
基于VSG的岸电电源控制主要由功频调节单元、励磁单元、定子电压方程,预同步单元等部分组成。
2.1 功频调节单元
功频调节单元模拟了原动机调频特性和发电机转子特性,如式(1)所示
(1) $\left\{ \begin{align} & \frac{{{P}_{\text{m}}}}{{{\omega }_{\text{n}}}}-\frac{{{P}_{\text{e}}}}{{{\omega }_{\text{n}}}}=J\frac{\text{d}(\omega -{{\omega }_{\text{n}}})}{dt}+D(\omega -{{\omega }_{\text{n}}}) \\ & {{P}_{\text{m}}}={{P}_{\text{ref}}}+{{k}_{\text{f}}}({{\omega }_{\text{n}}}-\omega ) \\ & \frac{\text{d}\delta }{\text{d}t}=\omega -{{\omega }_{\text{n}}} \\ \end{align} \right.$
式中,P ref 、P e 分别为功率参考值和实际输出值;P m 为机械功率;J 、D 、k f 分别为惯量系数、阻尼系数和调频系数;ω 为角频率,ω n 为额定角频率;δ 为功角。
(2) $\frac{{{\omega }_{\text{n}}}-\omega }{{{P}_{\text{ref}}}-P}=-\frac{1}{J{{\omega }_{\text{n}}}s\text{+}D{{\omega }_{\text{n}}}+{{k}_{\text{f}}}}=-\frac{n}{ms+1}$
(3) $\left\{ \begin{align} & n=\frac{1}{D{{\omega }_{\text{n}}}+{{k}_{\text{f}}}} \\ & m=\frac{J{{\omega }_{\text{n}}}}{D{{\omega }_{\text{n}}}+{{k}_{\text{f}}}} \\ \end{align} \right.$
式中,系数n 决定岸电电源稳态频率误差;系数m 决定岸电电源动态响应速度。
当D =J =0时,有n =1/k f 且m =0,此时岸电电源的VSG控制即变为文献[9 ]中的Droop控制。
2.2 励磁单元
(4) $\left\{ \begin{align} & {{u}_{\text{ref}}}-{{u}_{\text{n}}}\text{=}{{k}_{\text{u}}}({{Q}_{\text{ref}}}-Q) \\ & {{E}_{0}}=({{k}_{\text{p}}}+\frac{{{k}_{i}}}{s})({{u}_{\text{ref}}}-{{u}_{\text{m}}}) \\ \end{align} \right.$
式中,Q ref 、Q 分别为无功功率指令值和实测值;u ref 、u n 分别为电压设定值和实测值;E 0 为控制环节中励磁电动势;k u 为调压系数。
VSG励磁单元将无功功率差值通过调压系数得到输出电压设定值u ref ,再将u ref 与电压实测值u n 的差值送入PI控制器,最终得到E 0 ,使逆变器具备与实际发电机类似的Q -U 下垂特性。
2.3 定子电压方程
(5) $\left\{ \begin{align} & {{u}_{\text{dref}}}={{L}_{\text{v}}}\frac{d{{i}_{\text{d}}}}{dt}\text{+}\omega {{L}_{\text{v}}}{{i}_{\text{q}}}-{{R}_{\text{v}}}{{i}_{\text{d}}}+{{E}_{\text{d}}} \\ & {{u}_{\text{qref}}}={{L}_{\text{v}}}\frac{d{{i}_{\text{q}}}}{dt}\text{+}\omega {{L}_{\text{v}}}{{i}_{\text{d}}}-{{R}_{\text{v}}}{{i}_{\text{q}}} \\ \end{align} \right.$
式中,u dref 、u qref 分别为岸电输出电压dq 轴分量;i d 、i q 分别为岸电输出电流;E d 为VSG内电势;L v 、R v 为VSG虚拟阻抗。
2.4 预同步单元
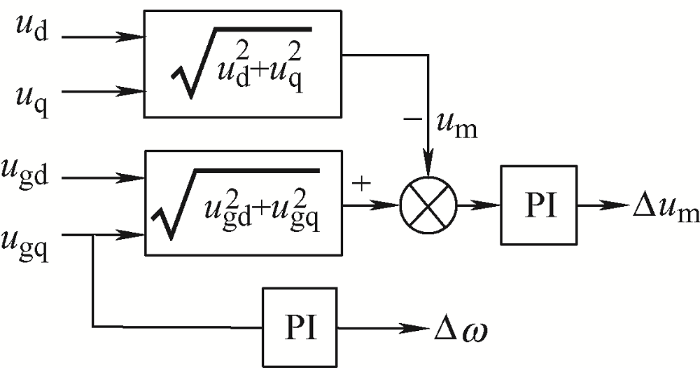
并网前,为了实现岸电电源电压对船舶电网电压的追踪,本文提出如图1 所示的预同步策略。
图1
图1 中,u gd 、u gq 分别为船网电压以岸电电源输出端电压相位为参考相位进行坐标变化得到的dq 轴分量;u d 、u q 分别为岸电电源输出电压的dq 轴分量;Δu m 、Δω 分别为电压幅值补偿量和角频率补偿量。由预同步单元得到的Δu m 、Δω 分别送入VSG的励磁单元和功频调节单元,最终通过闭环控制实现了岸电电源与船舶电网间电压幅值、相位的同步。
综上可得基于VSG策略的岸电电源控制框图如图2 所示。
图2
3 二段式负载转移策略
3.1 负载转移原理
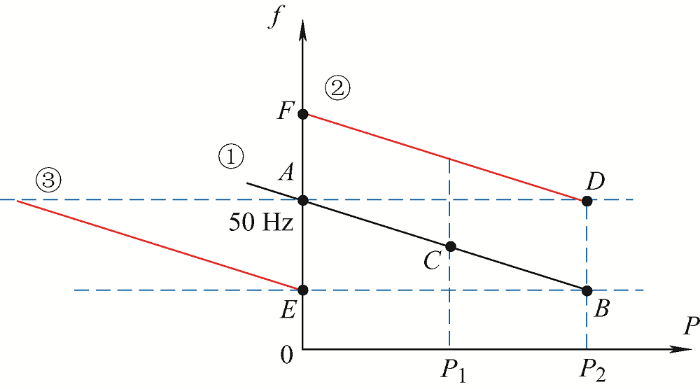
为了实现船舶负载的平滑转移,本文提出二段式负载转移策略,即将船舶负载转移过程分为两个阶段:① 岸电电源与船舶发电机均分负载功率;② 岸电电源输出功率根据指令值达到全部负载功率或者零,其示意图如图3 所示。
图3
图3 中,船舶靠港和船舶离港时都需要进行负载转移,下文分别进行讨论。
(1) 负载从船舶电网向岸电电源转移。船舶靠岸时,船舶发电机带载运行于B 点,岸电电源空载运行于A 点,经过预同步并网后两者稳定运行于C 点并自然均分功率,然后对岸电电源输出功率进行阶跃给定,使岸电输出特性由曲线①调整为曲线②,最终逆变器稳定运行于A 点,发电机稳定运行于D 点且输出功率为零,退出运行。
(2) 负载从岸电电源向船舶电网转移。船舶离港时,岸电电源带载运行于D 点,发电机空载运行于A 点,通过阶跃给定逆变器输出功率参考值,使其输出特性曲线由②→①→③,最终发电机稳定运行于B 点,逆变器稳定运行于E 点且输出功率为零,退出运行。
值得注意的是:船侧发电机在接入岸电的过程中调速特性只进行一次调节[14 ] ,即发电机输出特性始终为曲线①,且初始带载运行的频率略低于50 Hz;若岸电电源在并网后立即阶跃功率给定,则其初始空载频率为F 点频率,相比于文章提出的二段式负载转移策略,增加了频率的波动范围。
3.2 控制参数设计
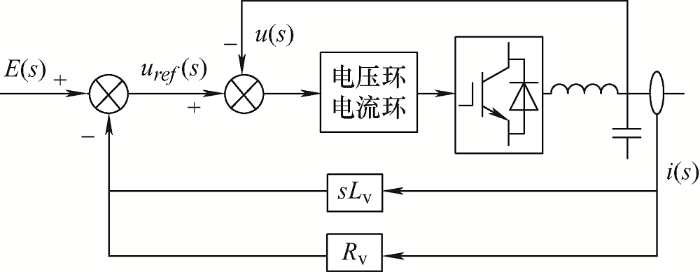
电压参考值经过电压、电流环得到的输出电压为[12 ]
(6) $u(s)={{G}_{\text{u}}}(s){{u}_{ref}}(s)-{{Z}_{\text{u}}}(s)i(s)$
式中,G u (s )为电压传递函数,一般幅值为1,相角为0;Z u (s )为岸电电源输出阻抗,其表达式为
(7) ${{Z}_{\text{u}}}(s)=\frac{L{{s}^{2}}}{LC{{s}^{3}}+\frac{KC{{U}_{\text{dc}}}}{2}{{s}^{2}}+\frac{2+K{{K}_{\text{p}}}{{U}_{\text{dc}}}}{2}s+\frac{K{{K}_{\text{i}}}{{U}_{\text{dc}}}}{2}}$
本文取文献[15 ]中的控制参数,如表1 所示,可得当f =50 Hz时,有
(8) ${{Z}_{\text{u}}}(s)=0.01\angle {{90}^{\text{ }\!\!{}^\circ\!\!\text{ }}}$
当引入式(5)中的虚拟阻抗后,可得如图4 所示的岸电电源输出电压跟踪图。
图4
(9) $\begin{align} & {{u}_{\text{ref}}}(s)=E(s)-i(s)({{R}_{\text{v}}}+{{L}_{\text{v}}})= \\ & E(s)-i(s){{Z}_{\text{v}}}(s) \end{align}$
(10) $\begin{matrix} u(s)={{G}_{\text{u}}}(s)E(s)-i(s)({{Z}_{\text{u}}}(s)+{{G}_{\text{u}}}(s){{Z}_{\text{v}}}(s))= \\ {{G}_{\text{u}}}(s)E(s)-i(s)Z(s) \\ \end{matrix}$
由式(8)、(10)可知,由于Z u (s )很小,岸电电源引入虚拟阻抗后的等效输出阻抗Z (s )主要由Z v 决定。且由于岸电上船的传输线路很短,线路阻抗中阻性成分影响很小,本文取R v =0,L v =2.5 mH,可使岸电电源总输出阻抗近似为感性。
图5
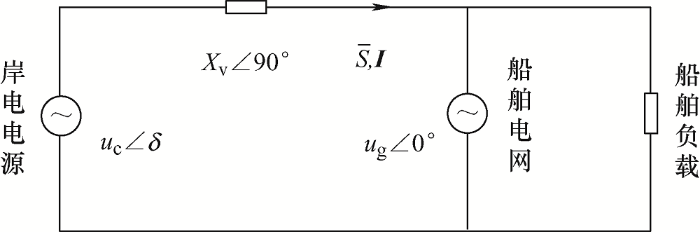
图5 中,u c $\angle$δ 、u g $\angle$0°分别为岸电电源电压和船舶电网电压;X v $\angle$90°为虚拟电抗;$\bar{S}$,I
(11) $\mathbf{I}=\frac{{{u}_{\text{c}}}\angle \delta -{{u}_{\text{g}}}\angle {{0}^{{}^\circ }}}{{{X}_{\text{v}}}\angle {{90}^{{}^\circ }}}$
(12) $\begin{matrix} P=\operatorname{Re}[\bar{S}]=\operatorname{Re}[{{u}_{\text{c}}}\angle \delta \times {{\mathbf{I}}^{*}}]= \\ \frac{u_{\text{c}}^{2}\cos {{90}^{{}^\circ }}-{{u}_{c}}{{u}_{\text{g}}}\cos (\delta +{{90}^{{}^\circ }})}{{{X}_{\text{v}}}}=\frac{{{u}_{c}}{{u}_{\text{g}}}\sin \delta }{{{X}_{\text{v}}}} \\ \end{matrix}$
当岸电电源和船舶发电机并联运行时,两者电压相位基本相同,即可认为δ 约等于零,可得
(13) $P\approx \frac{{{u}_{\text{c}}}{{u}_{\text{g}}}\delta }{{{X}_{\text{v}}}}$
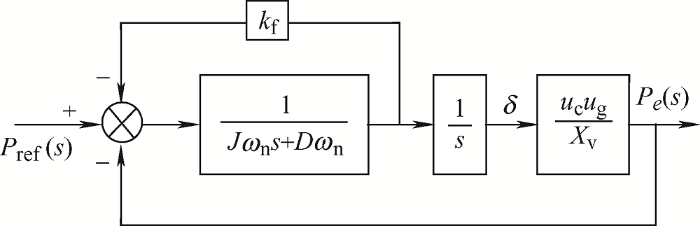
由上述分析可得,逆变器与发电机并联运行时,功频控制环节如图6 所示。
图6
(14) ${{G}_{\text{p}}}\left( s \right)=\frac{{{P}_{e}}\left( s \right)}{{{P}_{ref}}\left( s \right)}=\frac{\frac{1}{J{{\omega }_{\text{n}}}}\frac{{{u}_{\text{c}}}{{u}_{\text{g}}}}{{{X}_{\text{v}}}}}{{{s}^{2}}+\left( \frac{D}{J}+\frac{{{k}_{\text{f}}}}{J{{\omega }_{\text{n}}}} \right)s+\frac{1}{J{{\omega }_{\text{n}}}}\frac{{{u}_{\text{c}}}{{u}_{\text{g}}}}{{{X}_{\text{v}}}}}$
(15) $\left\{ \begin{align} & {{\omega }_{1}}=\sqrt{\frac{1}{J{{\omega }_{\text{n}}}}\frac{{{u}_{\text{c}}}{{u}_{\text{g}}}}{X}} \\ & \zeta =\frac{(D{{\omega }_{\text{n}}}+{{k}_{\text{f}}})\sqrt{{\frac{1}{J{{\omega }_{\text{n}}}}}/{\frac{{{u}_{\text{c}}}{{u}_{\text{g}}}}{X}}\;}}{2} \\ \end{align} \right.$
式中,ω 1 为无阻尼振荡角频率;ζ 为阻尼比。由于岸电在达到设定功率的过程中应尽量避免功率超调,以防止对船舶发电机造成逆功率,故本文将系统设计为临界阻尼系统,即满足ζ =1。
因此,结合本文提出的二段式负载转移策略,提出控制参数设计过程如下:首先确定岸电电源下垂系数n ,使其与发电机下垂系数一致,在负载转移的第一阶段可以实现功率均分,再根据约束方程式(16)确定系数D 、J 、k f ,使系统为临界阻尼系统,在负载转移的第二阶段能够使输出功率达到设定值且不出现功率超调。
(16) $\left\{ \begin{align} & n=\frac{1}{D{{\omega }_{\text{n}}}+{{k}_{\text{f}}}} \\ & \zeta =\frac{(D{{\omega }_{\text{n}}}+{{k}_{\text{f}}})\sqrt{{\frac{1}{J{{\omega }_{\text{n}}}}}/{\frac{{{u}_{\text{c}}}{{u}_{\text{g}}}}{X}}\;}}{2}\text{=}1 \\ \end{align} \right.$
综上,当u c =u g =326.6 V时,可以得到一组合适的参数:L v =2.5 mH,k f =4 300,D =50,J =2.34。
4 仿真结果分析
本文在Matlab/Simulink平台上搭建仿真模型,分别对船舶靠港使用岸电电源与离港断开岸电电源的过程进行仿真验证。仿真模型参数如表2 所示。
4.1 靠港时负载转移仿真结果
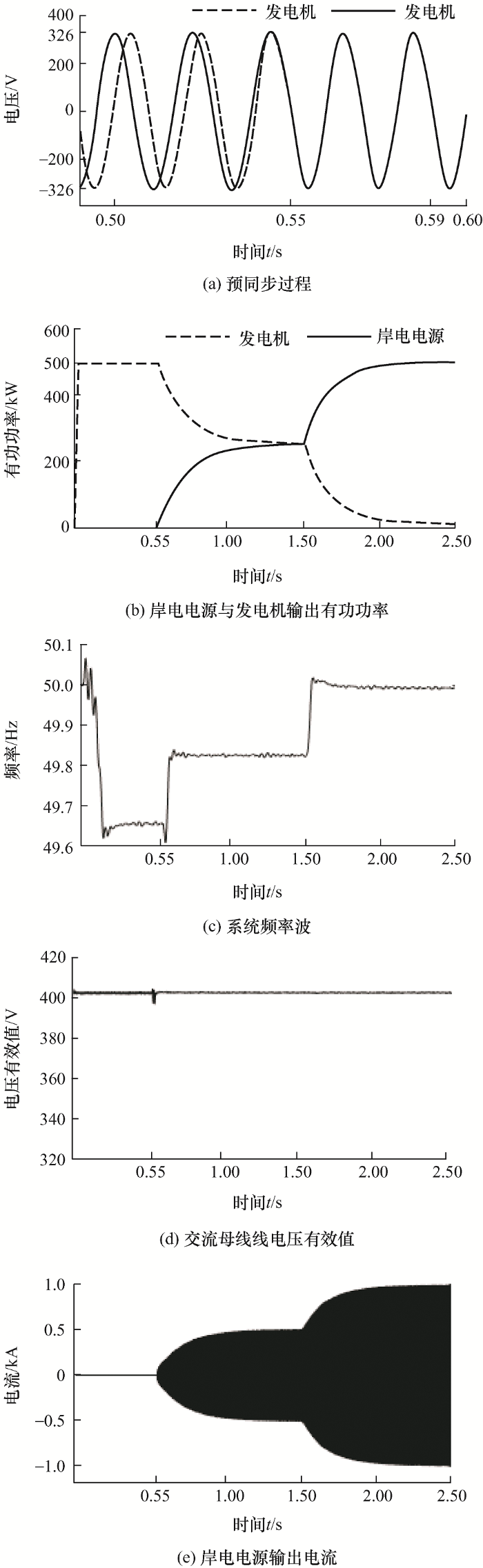
船舶停靠港口,船舶负载需要由船舶发电机供电无缝切换至岸电电源供电,仿真过程如下:0~0.5 s时段为岸电电源空载运行过程;0.5~0.55 s时段为岸电电源的预同步过程;0.55~2.5 s时段为岸电电源与船舶发电机并网并实现负荷转移的过程。仿真结果如图7 所示。
图7
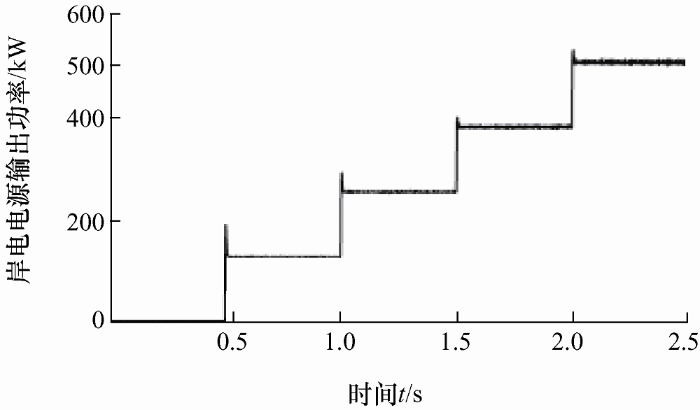
为了对比效果,本文同时对文献[6 ]所提出的基于Droop控制的逐级切换策略进行仿真,得到如图8 所示波形。
图8
由图7 a可知,并网前发电机相位超前于岸电相位,t =0.5 s时开始进行预同步使岸电电源对船舶发电机相位进行追踪,t =0.55 s时两者相位一致完成并网;图7 b为有功功率波形,0.55~1.5 s岸电电源与发电机均分负载功率,t =1.5 s时将岸电电源功率参考值阶跃给定至500 kW,使岸电电源输出功率继续增大,直至发电机功率降为零左右并退出运行,由岸电电源单独带负载运行;图7 c为频率波形,发电机初始带载频率约为49.65 Hz,并网后先转移一半负载,系统频率上升至49.82 Hz,当完成全部负载转移后,频率上升至50 Hz,与理论分析一致且频率的波动范围符合《码头船舶岸电设施建设技术规范》JTS155—2018规定的50 Hz±5%要求;由图7 d、7e可知负载转移过程中电压能够保持稳定且没有大的电流冲击。
相比于图8 所示的基于Droop控制的逐级切换策略可能出现8%左右功率超调的问题,本文提出的二段式负载转移策略能够保证负载转移过程中不出现功率超调且整个过程平滑无冲击。
4.2 离港时负载转移仿真结果
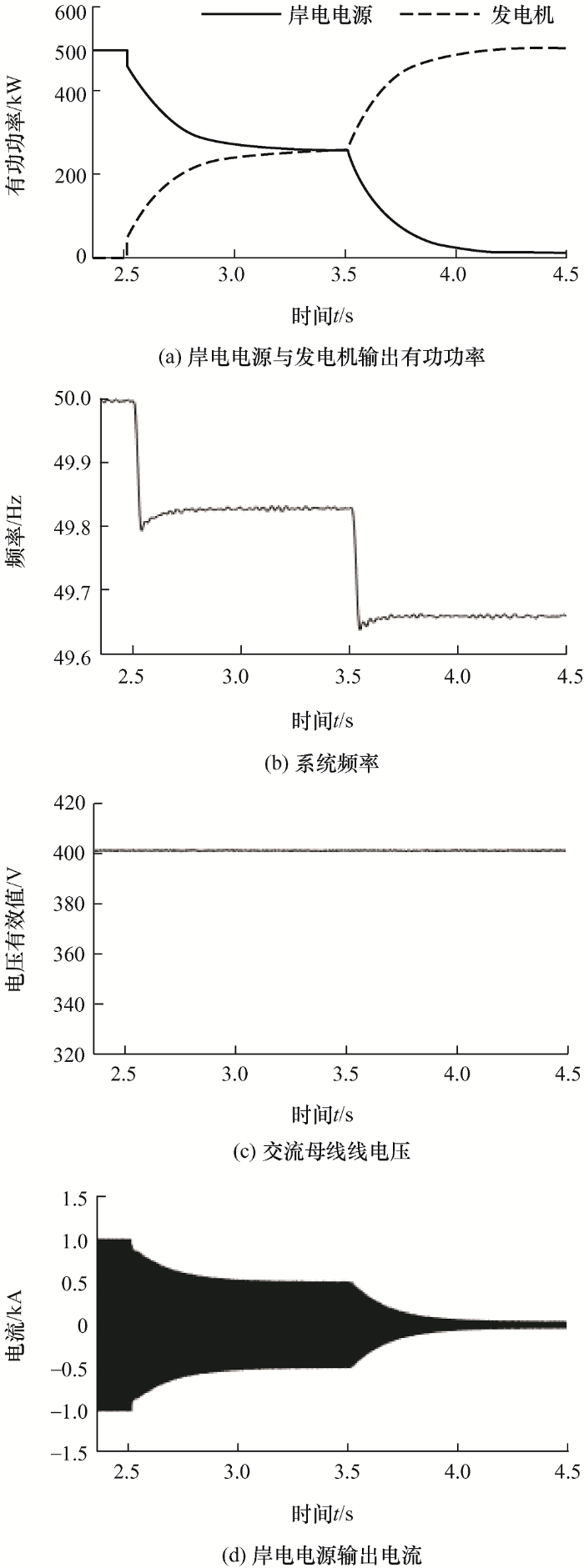
本文不讨论岸电电源单独带负载运行的工况,在完成负载从船舶电网向岸电电源转移后立即使负载从岸电电源向船舶电网转移来模拟船舶离港时断开岸电的工况。仿真结果如图9 所示。
图9
仿真过程如下:2.5~3.5 s为岸电电源与发电机达到均分负载功率的过程;3.5~4.5 s为岸电电源输出功率降为零并退出运行,发电机输出功率达到全部负载功率的过程。
由图9 a、9b可知,离港时负载转移结果与靠港时负载转移结果类似,岸电电源先与发电机均分负载功率再逐渐降为零并退出运行,系统频率在标准范围类阶梯式变化;由图9 c、9d可知,离港时负载转移过程中电压无大的波动且不出现电流冲击。
5 结论
(1) 本文提出二段式船岸间负载转移策略,使岸电电源输出功率能够先均分负载功率再达到功率设定值。
(2) 通过参数优化将系统设计为二阶临界阻尼系统,最终使岸电电源输出功率能够无超调的达到设定值,相比于基于Droop控制的逐级切换方式,能够有效避免对发电机造成逆功率,实现了船舶负载的平滑转移。
参考文献
View Option
[1]
陈枫 , 应鸿 , 徐鲲鹏 , 等 . 船舶岸电电源多机并联的并网无缝切换技术的研究
[J]. 电气工程学报 , 2017 , 12 (4 ):33 -37 .
[本文引用: 1]
CHEN Feng YING Hong XU Kunpeng , et al . Research on grid connected seamless switching technology of multi-level parallel connection of ship’s shore power supply
[J]. Journal of Electrical Engineering , 2017 , 12 (4 ):33 -37 .
[本文引用: 1]
[2]
万光芬 , 徐正海 , 胡意茹 . 海上油田群岸电无功补偿应用研究
[J]. 电工技术 , 2022 (1 ):65 -68 .
[本文引用: 1]
WAN Guangfen XU Zhenghai HU Yiru . Study on reactive power compensation from shore in offshore oil and gas fields
[J]. Electric Engineering , 2022 (1 ):65 -68 .
[本文引用: 1]
[3]
温皓白 , 张德文 , 吴振飞 , 等 . 我国港口船舶岸电系统标准现状和分析
[J]. 港口科技 , 2021 (4 ):29 -32 .
[本文引用: 1]
WEN Haobai ZHANG Dewen WU Zhenfei , et al . Current situation and analysis of standards for shore power system of port ships in China
[J]. Science and Technology of Ports , 2021 (4 ):29 -32 .
[本文引用: 1]
[4]
张强 , 高璇 . 海上油气田岸电一体化监控方案设计
[J]. 电工技术 , 2020 (23 ):88 -90 ,93.
[本文引用: 1]
ZHANG Qiang GAO Xuan . Design of shore power integrated monitoring scheme for offshore oil and gas fields
[J]. Electric Engineering , 2020 (23 ):88 -90 ,93.
[本文引用: 1]
[5]
SONG T L LI Y HU X Q , et al . Cost-effective optimization analysis of shore-to-ship power system construction and operation [C]//Proceedings of 2017 IEEE Conference on Energy Internet and Energy System Integration,Beijing,China, 2017 :1 -6 .
[本文引用: 1]
[6]
胡晓青 , 王蓓蓓 , 黄俊辉 , 等 . 岸电建设运营各方成本效益最优化分析及江湖海岸电特性比较
[J]. 电力自动化设备 , 2018 , 38 (9 ):169 -178 .
[本文引用: 3]
HU Xiaoqing WANG Beibei HUANG Junhui . Cost-benefit optimization analysis of participants in shore-side power construction and operation and characteristic comparison among river,lake and ocean shore-side power
[J]. Electric Power Automation Equipment , 2018 , 38 (9 ):169 -178 .
[本文引用: 3]
[7]
卞松辉 . 船舶岸电无缝并网控制策略研究 [D]. 镇江 : 江苏科技大学 , 2019 .
[本文引用: 1]
BIAN Songhui . Research on seamless grid-connected control strategy of ship shore power [D]. Zhenjiang : Jiangsu University of Science and Technology , 2019 .
[本文引用: 1]
[8]
曹鑫巍 . 岸电无缝接入与解列船舶电网相关问题的研究 [D]. 南京 : 东南大学 , 2019 .
[本文引用: 1]
CAO Xinwei . Research on the seamless connection and disconnection between ship grid and shore power supply [D]. Nanjing : Southeast University , 2019 .
[本文引用: 1]
[9]
曹亮 , 房鑫炎 , 罗文斌 . 船岸一体化系统中岸电无缝接入与功率优化方法
[J]. 电力自动化设备 , 2019 , 39 (6 ):185 -191 .
[本文引用: 3]
CAO Liang FANG Xinyan LUO Wenbin . Seamless connection and power optimization of shore power in ship-shore integrated system
[J]. Electric Power Automation Equipment , 2019 , 39 (6 ):185 -191 .
[本文引用: 3]
[10]
戴振亚 . 低压船舶岸电电源控制策略的研究 [D]. 哈尔滨 : 哈尔滨工业大学 , 2017 .
[本文引用: 1]
DAI Zhenya . Research on the control strategy of low voltage shore power [D]. Harbin : Harbin Institute of Technology , 2017 .
[本文引用: 1]
[11]
侯珏 . 船舶与岸电并网控制策略研究
[J]. 船舶工程 , 2017 , 39 (1 ):86 -90 .
[本文引用: 1]
HOU Jue . Research on grid connected control strategy of ship and shore
[J]. Ship Engineering , 2017 , 39 (1 ):86 -90 .
[本文引用: 1]
[12]
HOU J . Operation strategy of shore to ship power based on improved droop control [C]//Proceedings of 2017 IEEE Transportation Electrification Conference and Expo,Harbin,China, 2017 :1 -6 .
[本文引用: 2]
[13]
郜克存 , 毕大强 , 戴瑜兴 . 基于虚拟同步发电机的船舶岸电电源控制策略
[J]. 电机与控制学报 , 2015 , 19 (2 ):45 -52 .
[本文引用: 1]
GAO Kecun BI Daqiang DAI Yuxing . Novel control strategy of shore power supply based on virtual synchronous generator
[J]. Electric Machines and Control , 2015 , 19 (2 ):45 -52 .
[本文引用: 1]
[14]
吴志良 . 船舶电站 [M]. 大连 : 大连海事大学出版社 , 2012 .
[本文引用: 1]
WU Zhiliang . Ship power station [M]. Dalian : Dalian Maritime University Press , 2012 .
[本文引用: 1]
[15]
荆龙 , 黄杏 , 吴学智 . 改进型微源下垂控制策略研究
[J]. 电工技术学报 , 2014 , 29 (2 ):145 -152 .
[本文引用: 1]
JING Long HUANG Xing WU Xuezhi . Research on improved microsource droop control method
[J]. Transactions of China Electrotechnical Society , 2014 , 29 (2 ):145 -152 .
[本文引用: 1]
船舶岸电电源多机并联的并网无缝切换技术的研究
1
2017
... 采用岸电电源代替船舶发电机为船用负载供电可以很大程度上减轻靠港船舶对港口环境的污染[1 ⇓ ⇓ -4 ] .港口的岸电电源可以将陆地电网经过调压、整流、逆变等环节为靠港船舶的负载提供合格的电能,具备较好的经济和环境效益[5 -6 ] . ...
Research on grid connected seamless switching technology of multi-level parallel connection of ship’s shore power supply
1
2017
... 采用岸电电源代替船舶发电机为船用负载供电可以很大程度上减轻靠港船舶对港口环境的污染[1 ⇓ ⇓ -4 ] .港口的岸电电源可以将陆地电网经过调压、整流、逆变等环节为靠港船舶的负载提供合格的电能,具备较好的经济和环境效益[5 -6 ] . ...
海上油田群岸电无功补偿应用研究
1
2022
... 采用岸电电源代替船舶发电机为船用负载供电可以很大程度上减轻靠港船舶对港口环境的污染[1 ⇓ ⇓ -4 ] .港口的岸电电源可以将陆地电网经过调压、整流、逆变等环节为靠港船舶的负载提供合格的电能,具备较好的经济和环境效益[5 -6 ] . ...
Study on reactive power compensation from shore in offshore oil and gas fields
1
2022
... 采用岸电电源代替船舶发电机为船用负载供电可以很大程度上减轻靠港船舶对港口环境的污染[1 ⇓ ⇓ -4 ] .港口的岸电电源可以将陆地电网经过调压、整流、逆变等环节为靠港船舶的负载提供合格的电能,具备较好的经济和环境效益[5 -6 ] . ...
我国港口船舶岸电系统标准现状和分析
1
2021
... 采用岸电电源代替船舶发电机为船用负载供电可以很大程度上减轻靠港船舶对港口环境的污染[1 ⇓ ⇓ -4 ] .港口的岸电电源可以将陆地电网经过调压、整流、逆变等环节为靠港船舶的负载提供合格的电能,具备较好的经济和环境效益[5 -6 ] . ...
Current situation and analysis of standards for shore power system of port ships in China
1
2021
... 采用岸电电源代替船舶发电机为船用负载供电可以很大程度上减轻靠港船舶对港口环境的污染[1 ⇓ ⇓ -4 ] .港口的岸电电源可以将陆地电网经过调压、整流、逆变等环节为靠港船舶的负载提供合格的电能,具备较好的经济和环境效益[5 -6 ] . ...
海上油气田岸电一体化监控方案设计
1
2020
... 采用岸电电源代替船舶发电机为船用负载供电可以很大程度上减轻靠港船舶对港口环境的污染[1 ⇓ ⇓ -4 ] .港口的岸电电源可以将陆地电网经过调压、整流、逆变等环节为靠港船舶的负载提供合格的电能,具备较好的经济和环境效益[5 -6 ] . ...
Design of shore power integrated monitoring scheme for offshore oil and gas fields
1
2020
... 采用岸电电源代替船舶发电机为船用负载供电可以很大程度上减轻靠港船舶对港口环境的污染[1 ⇓ ⇓ -4 ] .港口的岸电电源可以将陆地电网经过调压、整流、逆变等环节为靠港船舶的负载提供合格的电能,具备较好的经济和环境效益[5 -6 ] . ...
1
2017
... 采用岸电电源代替船舶发电机为船用负载供电可以很大程度上减轻靠港船舶对港口环境的污染[1 ⇓ ⇓ -4 ] .港口的岸电电源可以将陆地电网经过调压、整流、逆变等环节为靠港船舶的负载提供合格的电能,具备较好的经济和环境效益[5 -6 ] . ...
岸电建设运营各方成本效益最优化分析及江湖海岸电特性比较
3
2018
... 采用岸电电源代替船舶发电机为船用负载供电可以很大程度上减轻靠港船舶对港口环境的污染[1 ⇓ ⇓ -4 ] .港口的岸电电源可以将陆地电网经过调压、整流、逆变等环节为靠港船舶的负载提供合格的电能,具备较好的经济和环境效益[5 -6 ] . ...
... 船舶岸电系统等效电路如图5 所示[6 ] . ...
... 为了对比效果,本文同时对文献[6 ]所提出的基于Droop控制的逐级切换策略进行仿真,得到如图8 所示波形. ...
Cost-benefit optimization analysis of participants in shore-side power construction and operation and characteristic comparison among river,lake and ocean shore-side power
3
2018
... 采用岸电电源代替船舶发电机为船用负载供电可以很大程度上减轻靠港船舶对港口环境的污染[1 ⇓ ⇓ -4 ] .港口的岸电电源可以将陆地电网经过调压、整流、逆变等环节为靠港船舶的负载提供合格的电能,具备较好的经济和环境效益[5 -6 ] . ...
... 船舶岸电系统等效电路如图5 所示[6 ] . ...
... 为了对比效果,本文同时对文献[6 ]所提出的基于Droop控制的逐级切换策略进行仿真,得到如图8 所示波形. ...
1
2019
... 为了保证船舶负载的不间断供电,岸电电源与船舶电网存在一个短时并联的过程,该过程主要通过对岸电电源核心装置—逆变器的控制来实现船用负载在船舶电网与岸电电源之间的平滑转移.目前针对该负载转移策略的研究较少.文献[7 ]对逆变器采用P/Q控制,但其输出功率为固定值,在并网前输出电流较大,在并网瞬间容易产生较大功率冲击.文献[8 ]提出一种利用船舶电网与岸电电源电压差实现负载转移的策略,该方法简单易行但需要牺牲一定的电压精度,容易造成输出电能质量不佳.文献[9 ]对逆变器采用Droop控制,通过逐级增大设定功率的方式来主动调节岸电电源输出功率进而实现负载转移,但由于逆变器响应过快的缺点,岸电电源输出功率会出现超调,容易对船舶发电机造成逆功率,威胁系统稳定性.文献[10 ⇓ -12 ]在Droop控制的基础上引入虚拟惯性,使负载转移的过程更加平缓,但其是通过调节发电机的输出功率,岸电按自身输出特性调节输出功率,增加了船侧的操作量.文献[13 ]研究了VSG控制的岸电电源在频率抗扰动性方面的优势,但并未研究船岸间负载转移过程. ...
1
2019
... 为了保证船舶负载的不间断供电,岸电电源与船舶电网存在一个短时并联的过程,该过程主要通过对岸电电源核心装置—逆变器的控制来实现船用负载在船舶电网与岸电电源之间的平滑转移.目前针对该负载转移策略的研究较少.文献[7 ]对逆变器采用P/Q控制,但其输出功率为固定值,在并网前输出电流较大,在并网瞬间容易产生较大功率冲击.文献[8 ]提出一种利用船舶电网与岸电电源电压差实现负载转移的策略,该方法简单易行但需要牺牲一定的电压精度,容易造成输出电能质量不佳.文献[9 ]对逆变器采用Droop控制,通过逐级增大设定功率的方式来主动调节岸电电源输出功率进而实现负载转移,但由于逆变器响应过快的缺点,岸电电源输出功率会出现超调,容易对船舶发电机造成逆功率,威胁系统稳定性.文献[10 ⇓ -12 ]在Droop控制的基础上引入虚拟惯性,使负载转移的过程更加平缓,但其是通过调节发电机的输出功率,岸电按自身输出特性调节输出功率,增加了船侧的操作量.文献[13 ]研究了VSG控制的岸电电源在频率抗扰动性方面的优势,但并未研究船岸间负载转移过程. ...
1
2019
... 为了保证船舶负载的不间断供电,岸电电源与船舶电网存在一个短时并联的过程,该过程主要通过对岸电电源核心装置—逆变器的控制来实现船用负载在船舶电网与岸电电源之间的平滑转移.目前针对该负载转移策略的研究较少.文献[7 ]对逆变器采用P/Q控制,但其输出功率为固定值,在并网前输出电流较大,在并网瞬间容易产生较大功率冲击.文献[8 ]提出一种利用船舶电网与岸电电源电压差实现负载转移的策略,该方法简单易行但需要牺牲一定的电压精度,容易造成输出电能质量不佳.文献[9 ]对逆变器采用Droop控制,通过逐级增大设定功率的方式来主动调节岸电电源输出功率进而实现负载转移,但由于逆变器响应过快的缺点,岸电电源输出功率会出现超调,容易对船舶发电机造成逆功率,威胁系统稳定性.文献[10 ⇓ -12 ]在Droop控制的基础上引入虚拟惯性,使负载转移的过程更加平缓,但其是通过调节发电机的输出功率,岸电按自身输出特性调节输出功率,增加了船侧的操作量.文献[13 ]研究了VSG控制的岸电电源在频率抗扰动性方面的优势,但并未研究船岸间负载转移过程. ...
1
2019
... 为了保证船舶负载的不间断供电,岸电电源与船舶电网存在一个短时并联的过程,该过程主要通过对岸电电源核心装置—逆变器的控制来实现船用负载在船舶电网与岸电电源之间的平滑转移.目前针对该负载转移策略的研究较少.文献[7 ]对逆变器采用P/Q控制,但其输出功率为固定值,在并网前输出电流较大,在并网瞬间容易产生较大功率冲击.文献[8 ]提出一种利用船舶电网与岸电电源电压差实现负载转移的策略,该方法简单易行但需要牺牲一定的电压精度,容易造成输出电能质量不佳.文献[9 ]对逆变器采用Droop控制,通过逐级增大设定功率的方式来主动调节岸电电源输出功率进而实现负载转移,但由于逆变器响应过快的缺点,岸电电源输出功率会出现超调,容易对船舶发电机造成逆功率,威胁系统稳定性.文献[10 ⇓ -12 ]在Droop控制的基础上引入虚拟惯性,使负载转移的过程更加平缓,但其是通过调节发电机的输出功率,岸电按自身输出特性调节输出功率,增加了船侧的操作量.文献[13 ]研究了VSG控制的岸电电源在频率抗扰动性方面的优势,但并未研究船岸间负载转移过程. ...
船岸一体化系统中岸电无缝接入与功率优化方法
3
2019
... 为了保证船舶负载的不间断供电,岸电电源与船舶电网存在一个短时并联的过程,该过程主要通过对岸电电源核心装置—逆变器的控制来实现船用负载在船舶电网与岸电电源之间的平滑转移.目前针对该负载转移策略的研究较少.文献[7 ]对逆变器采用P/Q控制,但其输出功率为固定值,在并网前输出电流较大,在并网瞬间容易产生较大功率冲击.文献[8 ]提出一种利用船舶电网与岸电电源电压差实现负载转移的策略,该方法简单易行但需要牺牲一定的电压精度,容易造成输出电能质量不佳.文献[9 ]对逆变器采用Droop控制,通过逐级增大设定功率的方式来主动调节岸电电源输出功率进而实现负载转移,但由于逆变器响应过快的缺点,岸电电源输出功率会出现超调,容易对船舶发电机造成逆功率,威胁系统稳定性.文献[10 ⇓ -12 ]在Droop控制的基础上引入虚拟惯性,使负载转移的过程更加平缓,但其是通过调节发电机的输出功率,岸电按自身输出特性调节输出功率,增加了船侧的操作量.文献[13 ]研究了VSG控制的岸电电源在频率抗扰动性方面的优势,但并未研究船岸间负载转移过程. ...
... 本文对岸电电源采用VSG控制,并提出二段式负载转移策略,使岸电电源先与船舶发电机均分负载功率再达到功率设定值.相比于文献[9 ]逐级切换策略,在能够实现岸电电源功率主动调节的同时,通过参数优化解决了功率超调问题,使发电机能够在正确的时间切除,有利于船舶岸电系统安全稳定运行. ...
... 当D =J =0时,有n =1/k f 且m =0,此时岸电电源的VSG控制即变为文献[9 ]中的Droop控制. ...
Seamless connection and power optimization of shore power in ship-shore integrated system
3
2019
... 为了保证船舶负载的不间断供电,岸电电源与船舶电网存在一个短时并联的过程,该过程主要通过对岸电电源核心装置—逆变器的控制来实现船用负载在船舶电网与岸电电源之间的平滑转移.目前针对该负载转移策略的研究较少.文献[7 ]对逆变器采用P/Q控制,但其输出功率为固定值,在并网前输出电流较大,在并网瞬间容易产生较大功率冲击.文献[8 ]提出一种利用船舶电网与岸电电源电压差实现负载转移的策略,该方法简单易行但需要牺牲一定的电压精度,容易造成输出电能质量不佳.文献[9 ]对逆变器采用Droop控制,通过逐级增大设定功率的方式来主动调节岸电电源输出功率进而实现负载转移,但由于逆变器响应过快的缺点,岸电电源输出功率会出现超调,容易对船舶发电机造成逆功率,威胁系统稳定性.文献[10 ⇓ -12 ]在Droop控制的基础上引入虚拟惯性,使负载转移的过程更加平缓,但其是通过调节发电机的输出功率,岸电按自身输出特性调节输出功率,增加了船侧的操作量.文献[13 ]研究了VSG控制的岸电电源在频率抗扰动性方面的优势,但并未研究船岸间负载转移过程. ...
... 本文对岸电电源采用VSG控制,并提出二段式负载转移策略,使岸电电源先与船舶发电机均分负载功率再达到功率设定值.相比于文献[9 ]逐级切换策略,在能够实现岸电电源功率主动调节的同时,通过参数优化解决了功率超调问题,使发电机能够在正确的时间切除,有利于船舶岸电系统安全稳定运行. ...
... 当D =J =0时,有n =1/k f 且m =0,此时岸电电源的VSG控制即变为文献[9 ]中的Droop控制. ...
1
2017
... 为了保证船舶负载的不间断供电,岸电电源与船舶电网存在一个短时并联的过程,该过程主要通过对岸电电源核心装置—逆变器的控制来实现船用负载在船舶电网与岸电电源之间的平滑转移.目前针对该负载转移策略的研究较少.文献[7 ]对逆变器采用P/Q控制,但其输出功率为固定值,在并网前输出电流较大,在并网瞬间容易产生较大功率冲击.文献[8 ]提出一种利用船舶电网与岸电电源电压差实现负载转移的策略,该方法简单易行但需要牺牲一定的电压精度,容易造成输出电能质量不佳.文献[9 ]对逆变器采用Droop控制,通过逐级增大设定功率的方式来主动调节岸电电源输出功率进而实现负载转移,但由于逆变器响应过快的缺点,岸电电源输出功率会出现超调,容易对船舶发电机造成逆功率,威胁系统稳定性.文献[10 ⇓ -12 ]在Droop控制的基础上引入虚拟惯性,使负载转移的过程更加平缓,但其是通过调节发电机的输出功率,岸电按自身输出特性调节输出功率,增加了船侧的操作量.文献[13 ]研究了VSG控制的岸电电源在频率抗扰动性方面的优势,但并未研究船岸间负载转移过程. ...
1
2017
... 为了保证船舶负载的不间断供电,岸电电源与船舶电网存在一个短时并联的过程,该过程主要通过对岸电电源核心装置—逆变器的控制来实现船用负载在船舶电网与岸电电源之间的平滑转移.目前针对该负载转移策略的研究较少.文献[7 ]对逆变器采用P/Q控制,但其输出功率为固定值,在并网前输出电流较大,在并网瞬间容易产生较大功率冲击.文献[8 ]提出一种利用船舶电网与岸电电源电压差实现负载转移的策略,该方法简单易行但需要牺牲一定的电压精度,容易造成输出电能质量不佳.文献[9 ]对逆变器采用Droop控制,通过逐级增大设定功率的方式来主动调节岸电电源输出功率进而实现负载转移,但由于逆变器响应过快的缺点,岸电电源输出功率会出现超调,容易对船舶发电机造成逆功率,威胁系统稳定性.文献[10 ⇓ -12 ]在Droop控制的基础上引入虚拟惯性,使负载转移的过程更加平缓,但其是通过调节发电机的输出功率,岸电按自身输出特性调节输出功率,增加了船侧的操作量.文献[13 ]研究了VSG控制的岸电电源在频率抗扰动性方面的优势,但并未研究船岸间负载转移过程. ...
船舶与岸电并网控制策略研究
1
2017
... 为了保证船舶负载的不间断供电,岸电电源与船舶电网存在一个短时并联的过程,该过程主要通过对岸电电源核心装置—逆变器的控制来实现船用负载在船舶电网与岸电电源之间的平滑转移.目前针对该负载转移策略的研究较少.文献[7 ]对逆变器采用P/Q控制,但其输出功率为固定值,在并网前输出电流较大,在并网瞬间容易产生较大功率冲击.文献[8 ]提出一种利用船舶电网与岸电电源电压差实现负载转移的策略,该方法简单易行但需要牺牲一定的电压精度,容易造成输出电能质量不佳.文献[9 ]对逆变器采用Droop控制,通过逐级增大设定功率的方式来主动调节岸电电源输出功率进而实现负载转移,但由于逆变器响应过快的缺点,岸电电源输出功率会出现超调,容易对船舶发电机造成逆功率,威胁系统稳定性.文献[10 ⇓ -12 ]在Droop控制的基础上引入虚拟惯性,使负载转移的过程更加平缓,但其是通过调节发电机的输出功率,岸电按自身输出特性调节输出功率,增加了船侧的操作量.文献[13 ]研究了VSG控制的岸电电源在频率抗扰动性方面的优势,但并未研究船岸间负载转移过程. ...
Research on grid connected control strategy of ship and shore
1
2017
... 为了保证船舶负载的不间断供电,岸电电源与船舶电网存在一个短时并联的过程,该过程主要通过对岸电电源核心装置—逆变器的控制来实现船用负载在船舶电网与岸电电源之间的平滑转移.目前针对该负载转移策略的研究较少.文献[7 ]对逆变器采用P/Q控制,但其输出功率为固定值,在并网前输出电流较大,在并网瞬间容易产生较大功率冲击.文献[8 ]提出一种利用船舶电网与岸电电源电压差实现负载转移的策略,该方法简单易行但需要牺牲一定的电压精度,容易造成输出电能质量不佳.文献[9 ]对逆变器采用Droop控制,通过逐级增大设定功率的方式来主动调节岸电电源输出功率进而实现负载转移,但由于逆变器响应过快的缺点,岸电电源输出功率会出现超调,容易对船舶发电机造成逆功率,威胁系统稳定性.文献[10 ⇓ -12 ]在Droop控制的基础上引入虚拟惯性,使负载转移的过程更加平缓,但其是通过调节发电机的输出功率,岸电按自身输出特性调节输出功率,增加了船侧的操作量.文献[13 ]研究了VSG控制的岸电电源在频率抗扰动性方面的优势,但并未研究船岸间负载转移过程. ...
2
2017
... 为了保证船舶负载的不间断供电,岸电电源与船舶电网存在一个短时并联的过程,该过程主要通过对岸电电源核心装置—逆变器的控制来实现船用负载在船舶电网与岸电电源之间的平滑转移.目前针对该负载转移策略的研究较少.文献[7 ]对逆变器采用P/Q控制,但其输出功率为固定值,在并网前输出电流较大,在并网瞬间容易产生较大功率冲击.文献[8 ]提出一种利用船舶电网与岸电电源电压差实现负载转移的策略,该方法简单易行但需要牺牲一定的电压精度,容易造成输出电能质量不佳.文献[9 ]对逆变器采用Droop控制,通过逐级增大设定功率的方式来主动调节岸电电源输出功率进而实现负载转移,但由于逆变器响应过快的缺点,岸电电源输出功率会出现超调,容易对船舶发电机造成逆功率,威胁系统稳定性.文献[10 ⇓ -12 ]在Droop控制的基础上引入虚拟惯性,使负载转移的过程更加平缓,但其是通过调节发电机的输出功率,岸电按自身输出特性调节输出功率,增加了船侧的操作量.文献[13 ]研究了VSG控制的岸电电源在频率抗扰动性方面的优势,但并未研究船岸间负载转移过程. ...
... 电压参考值经过电压、电流环得到的输出电压为[12 ] ...
基于虚拟同步发电机的船舶岸电电源控制策略
1
2015
... 为了保证船舶负载的不间断供电,岸电电源与船舶电网存在一个短时并联的过程,该过程主要通过对岸电电源核心装置—逆变器的控制来实现船用负载在船舶电网与岸电电源之间的平滑转移.目前针对该负载转移策略的研究较少.文献[7 ]对逆变器采用P/Q控制,但其输出功率为固定值,在并网前输出电流较大,在并网瞬间容易产生较大功率冲击.文献[8 ]提出一种利用船舶电网与岸电电源电压差实现负载转移的策略,该方法简单易行但需要牺牲一定的电压精度,容易造成输出电能质量不佳.文献[9 ]对逆变器采用Droop控制,通过逐级增大设定功率的方式来主动调节岸电电源输出功率进而实现负载转移,但由于逆变器响应过快的缺点,岸电电源输出功率会出现超调,容易对船舶发电机造成逆功率,威胁系统稳定性.文献[10 ⇓ -12 ]在Droop控制的基础上引入虚拟惯性,使负载转移的过程更加平缓,但其是通过调节发电机的输出功率,岸电按自身输出特性调节输出功率,增加了船侧的操作量.文献[13 ]研究了VSG控制的岸电电源在频率抗扰动性方面的优势,但并未研究船岸间负载转移过程. ...
Novel control strategy of shore power supply based on virtual synchronous generator
1
2015
... 为了保证船舶负载的不间断供电,岸电电源与船舶电网存在一个短时并联的过程,该过程主要通过对岸电电源核心装置—逆变器的控制来实现船用负载在船舶电网与岸电电源之间的平滑转移.目前针对该负载转移策略的研究较少.文献[7 ]对逆变器采用P/Q控制,但其输出功率为固定值,在并网前输出电流较大,在并网瞬间容易产生较大功率冲击.文献[8 ]提出一种利用船舶电网与岸电电源电压差实现负载转移的策略,该方法简单易行但需要牺牲一定的电压精度,容易造成输出电能质量不佳.文献[9 ]对逆变器采用Droop控制,通过逐级增大设定功率的方式来主动调节岸电电源输出功率进而实现负载转移,但由于逆变器响应过快的缺点,岸电电源输出功率会出现超调,容易对船舶发电机造成逆功率,威胁系统稳定性.文献[10 ⇓ -12 ]在Droop控制的基础上引入虚拟惯性,使负载转移的过程更加平缓,但其是通过调节发电机的输出功率,岸电按自身输出特性调节输出功率,增加了船侧的操作量.文献[13 ]研究了VSG控制的岸电电源在频率抗扰动性方面的优势,但并未研究船岸间负载转移过程. ...
1
2012
... 值得注意的是:船侧发电机在接入岸电的过程中调速特性只进行一次调节[14 ] ,即发电机输出特性始终为曲线①,且初始带载运行的频率略低于50 Hz;若岸电电源在并网后立即阶跃功率给定,则其初始空载频率为F 点频率,相比于文章提出的二段式负载转移策略,增加了频率的波动范围. ...
1
2012
... 值得注意的是:船侧发电机在接入岸电的过程中调速特性只进行一次调节[14 ] ,即发电机输出特性始终为曲线①,且初始带载运行的频率略低于50 Hz;若岸电电源在并网后立即阶跃功率给定,则其初始空载频率为F 点频率,相比于文章提出的二段式负载转移策略,增加了频率的波动范围. ...
改进型微源下垂控制策略研究
1
2014
... 本文取文献[15 ]中的控制参数,如表1 所示,可得当f =50 Hz时,有 ...
Research on improved microsource droop control method
1
2014
... 本文取文献[15 ]中的控制参数,如表1 所示,可得当f =50 Hz时,有 ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}