1 引言
永磁同步电机以其结构简单、体积小、重量轻、损耗小以及效率高等优点,广泛应用于工业领域。由于永磁体磁链无法直接控制,当电机端电压达到逆变器输出电压上限时,为进一步提高转速,可利用去磁电流产生的电枢反应削弱气隙磁链,即弱磁控制。
文献[1 ]从本体结构角度分析了PMSM的失磁故障。为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] 。基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] 。基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] 。
前馈开环法主要根据电机模型和准确电机参数,计算参考弱磁电流轨迹以实现弱磁,结构简单、动态响应快。文献[5 ]对弱磁区域进行分块,通过线性拟合、以直代曲,简化了弱磁区域电流轨迹的计算。文献[6 ]首先通过转速判断电机是否要进行弱磁控制,然后对弱磁时的dq 轴电流进行前馈补偿以实现转速提高。文献[7 ]通过Ferrari法将弱磁区域电流轨迹表示为四阶方程,并给出相应的解析解,基于电机参数构建交、直轴电感与交、直轴电流的查找表用于转矩控制,使得控制精度得以提高,如果考虑铁损会获得更精确的参考电流轨迹解析解。然而由于前馈开环法的本质是开环控制结构,且对电机参数过于依赖,因此鲁棒性较差,在预试验次数不多、在线参数辨识有困难的情况下,将难以获得准确的电机参数,进而使实际应用受到了很大限制。
查表法通常根据大量试验数据,构建dq 轴电流、电感等查找表,以提高动态响应速度及鲁棒性。文献[8 ]提出了一种类似超前角的变弱磁角控制策略,通过场路耦合时间步进有限元法提供PMSM驱动电流参考,构建查找表,实现了PMSM的弱磁稳定运行,查表法运算量大。文献[9 ]通过二维有限元分析(2D finite element analysis,FEA),构造了不同转速、转矩下的dq 轴电流虚拟表,在样机测试中取得了预期效果。文献[10 ]提出考虑转矩、磁链及直流母线电压变化的dq 轴电流查找表,减少了计算量,且在弱磁时表现良好。然而,查表法仍需要大量离线测试,且可移植性差。
电压幅值比较法通过比较实际电压与逆变器输出电压极限,通过电压差增加闭环反馈,调节dq 轴电流,保持输出电压稳定在电压极限附近。根据电压差值经PI调节器输出物理量的不同,一般来说可分为负id 补偿法、超前角法和梯度下降法。负id 补偿法参数鲁棒性强,算法简单,但存在一定局限性,电压外环PI调节器输出为d 轴电流增量Δid ,d 轴电流超前q 轴电流变化,且当电机处于深度弱磁时,由于d 轴电流只能朝一个方向调节,即id 更负,则电流调节器容易饱和而引起失控[11 -12 ] 。文献[13 ]在传统负id 补偿法的基础上进行改进,通过d 轴电流限幅前后的差值对q 轴电流进行补偿,拓宽了调速范围,但没有对补偿标准进行说明,补偿值的不合理可能会引起电机失控。对超前角法来说,电压外环PI调节器输出为角度量,dq 轴电流根据定子电流幅值和超前角同时调节,id 变化的同时iq 也变化,对于SPMSM,电机由恒转矩区向恒功率弱磁区过渡时,可省略切换开关,然而,超前角法也只能朝一个方向调节id ,一旦进入深度弱磁区,将存在失控风险[14 ] 。与负id 补偿法、超前角法不同的是,梯度下降法的电压外环不含PI调节器,根据电压差、转矩方向及电压极限圆收缩方向,在不同弱磁区域同时输出相应dq 轴电流的修正值,有效地减小了深度弱磁区失控的风险,减小了转矩脉动,提高了稳定性,然而该算法相对复杂,修正值受电机参数影响[15 ] 。
单电流调节器法的本质是电压角控制,主要利用高速时dq 轴之间的交叉耦合效应,通过一个电流调节器达到同时完成速度调节及弱磁控制的目的,结构相对更为简单、动态响应快,避免了传统弱磁控制结构的双电流调节器在深度弱磁情况下易于饱和的问题,然而逆变器输出电压利用率下降,需要平衡带载与效率的指标要求,且由于低速时耦合效应不强,往往需要切换控制策略进行单电流调节器控制[16 ⇓ -18 ] 。文献[19 ]所提出的单电流调节器法,其弱磁参考电压由反馈电流计算得到,在考虑效率的情况下设计了弱磁电流轨迹,提高了带载能力,然而电压利用率仍比较低,仍需要考虑低速到弱磁的切换问题。
混合弱磁控制法通常结合两种及以上的控制方法,以达到更高的性能指标,这类算法通常比较复杂,涉及到查表法的方法都存在可移植性差的问题。文献[20 ]先后确定了恒转矩方向和电流下降方向,根据电流最小的原则对q 轴电压进行调节,结合了梯度下降法和单电流控制法,实现了弱磁效率的提高,算法相对比较复杂。
本文在上述研究的基础上,综合考虑算法复杂性、dq 轴电流调节一致性、是否适用于深度弱磁区等,针对SPMSM无限转速系统,首先通过失控分析,确定了最佳切换点,保证了弱磁稳定性基于最佳电流轨迹;然后提出了一种超前角结合MTPV的复合弱磁控制策略,该策略实现了dq 轴电流同时控制且控制算法简洁;最后通过仿真和试验验证了控制策略的有效性。
2 SPMSM数学模型
SPMSM在dq 旋转坐标系下的定子电压方程、电磁转矩方程分别为
(1) $\left\{ \begin{align} & {{u}_{d}}={{R}_{s}}{{i}_{d}}+{{L}_{s}}\frac{d{{i}_{d}}}{dt}-{{\omega }_{e}}{{L}_{s}}{{i}_{q}} \\ & {{u}_{q}}={{R}_{s}}{{i}_{q}}+{{L}_{s}}\frac{d{{i}_{q}}}{dt}+{{\omega }_{e}}{{L}_{s}}{{i}_{d}}+{{\omega }_{e}}{{\psi }_{f}} \\ \end{align} \right.$
(2) ${{T}_{e}}=1.5{{n}_{p}}{{\psi }_{f}}{{i}_{q}}$
式中,ud 、uq 、id 、iq 分别为dq 轴电压、电流;Rs 、Ls 、ψf 、np 分别为定子绕组电阻、电感、永磁体磁链、磁极对数;ωe 为转子电角速度;Te 为电磁转矩。
3 超前角结合MTPV的复合弱磁控制策略
3.1 弱磁控制基本原理
考虑SPMSM弱磁稳态运行时,忽略电阻上电压降,电流微分项为0,则稳态电压方程可写为
(3) $\left\{ \begin{array}{*{35}{l}} {{u}_{d}}=-{{\omega }_{e}}{{L}_{s}}{{i}_{q}} \\ {{u}_{q}}={{\omega }_{e}}\left( {{L}_{s}}{{i}_{d}}+{{\psi }_{f}} \right) \\ \end{array} \right.$
弱磁时,电流稳定工作点不应超过电机和逆变器容量限制的最大电压、电流值,即us max 、is max ,则电压、电流应满足
(4) ${{i}_{s}}=\sqrt{i_{d}^{2}+i_{q}^{2}}\le {{i}_{s\max }}$
(5) ${{u}_{s}}=\sqrt{u_{d}^{2}+u_{q}^{2}}\le {{u}_{s\max }}$
将式(3)代入式(5),用${{i}_{d}}$ ${{i}_{q}}$
(6) ${{\left( {{i}_{d}}+\frac{{{\psi }_{f}}}{{{L}_{s}}} \right)}^{2}}+i_{q}^{2}={{\left( \frac{{{u}_{s}}}{{{\omega }_{e}}{{L}_{s}}} \right)}^{2}}$
其中,电角速度${{\omega }_{e}}$
(7) ${{\omega }_{e}}=\frac{{{u}_{s\max }}}{\sqrt{{{\left( {{L}_{s}}{{i}_{d}}+{{\psi }_{f}} \right)}^{2}}+{{\left( -{{L}_{s}}{{i}_{q}} \right)}^{2}}}}$
(8) ${{i}_{ch}}=-\frac{{{\psi }_{f}}}{{{L}_{s}}}$
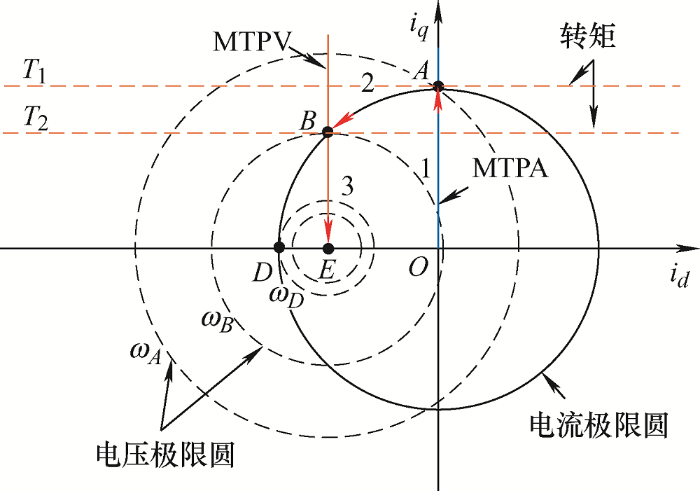
以id 、iq 作为坐标系,在同一平面内绘制由极限圆、电磁转矩、MTPA和MTPV曲线组成的电气约束图,如图1 所示。
图1
其中,T 1 、T 2 为恒转矩曲线,MTPA、MTPV曲线分别与电流、电压极限圆交于A 点、B 点;电压极限圆与电流极限圆相切时的切点为D 点;电压极限圆圆心为E 点,E 点处的d 轴电流即为特征电流。A 、B 、D 点对应转速分别为ωA 、ωB 、ωD 。
为在整个转速范围内最大限度地提高转矩,根据电机运行情况,可分为3个区域。
区域1:恒转矩区,is =is max ,us <u smax ,转速ωe ≤ωA ,采用MTPA控制策略,即id * = 0控制策略,对应最佳电流轨迹为O →A ,A 点为最大转矩点,且A 点为恒转矩区到恒功率弱磁区过渡点,对应转速ωA 为基速。
区域2:恒功率弱磁区,is =is max ,us =us max ,转速ωA <ωe ≤ωB ,随着转速升高,最佳电流轨迹为沿着电流极限圆运行A →B ,且B 点为恒功率弱磁区到深度弱磁区过渡点。
区域3:深度弱磁区,is <is max ,us =us max ,转速ωe >ωB ,采用MTPV控制策略,随着转速升高,最佳电流轨迹为B →E ,此时id * =-ψf /Ls 。
下面将对SPMSM弱磁区切换失控机理进行详细分析,在此基础上提出了一种超前角结合MTPV的复合弱磁控制策略,进行仿真和试验验证。
3.2 SPMSM弱磁失控分析
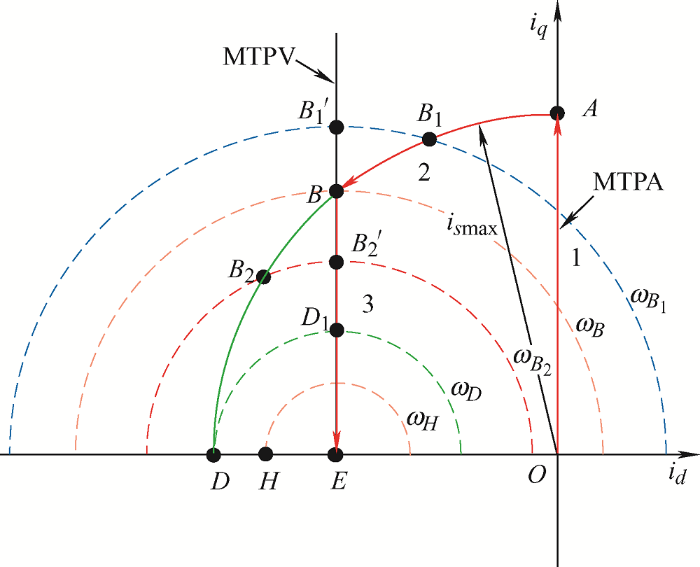
如图2 所示,电流、电压极限圆与MTPA、MTPV曲线分别交于A 点、B 点;D 点坐标为(is max , 0),点B 1 、B 1 ' ,点B 2 、B 2 ' 和点D 、D 1 分别为转速ωB 1 、ωB 2 、ωD 对应的电压极限圆与电流极限圆、MTPV曲线的交点,则有ωB 1 =ωB 1 ' ωB 2 =ωB 2 ' ωD =ωD 1 。虚线表示一簇电压极限圆,随着转速升高,电压极限圆逐渐向E 点收缩,E 点坐标为(-ψf /Ls , 0),且有ωB 1 <ωB <ωB 2 <ωD <ωH 。
图2
从工作点连续性、转矩脉动等角度,针对SPMSM弱磁区进行失控分析,并就转速ωB >ωB 1 、ωB <ωB 2 两种情况从恒功率弱磁区向深度弱磁区切换分别进行讨论。
当电机在转速ωB 1 时切换,由于ωB 1 =ωB 1 ' B 1 点突变至B 1 ' 点,dq 轴电流突变,产生较大的转矩脉动,此外,B 1 ' 点位于电流极限圆外,超出了电流极限,电流调节器无法调节dq 轴电流,易造成电机失控。
当电机在转速ωB 2 时切换,由于ωB 2 =ωB 2 ' B 2 点突变至B 2 ' 点,dq 轴电流突变,产生较大的转矩脉动,进而可能引起失控。若电机在B 2 点没有切换,继续沿着电流极限圆进行恒功率弱磁,然后切换,则dq 轴电流突变加剧,产生更大的转矩脉动,这将增加电机失控的风险。一旦电机运行到D 点不切换,注意到D 点是电流极限圆与电压极限圆的唯一交点,由于转速波动,则电机转速可能为ωe =ωH ,而此时电流指令因为电压饱和而被钳位在D 点。
由以上分析可知,最佳电流轨迹为O →A →B →E ,恒功率弱磁区到深度弱磁区的过渡点B 点为最佳切换点,在转速ωe =ωB 时切换,可减小转矩脉动,保证SPMSM的稳定运行。
为了使SPMSM基于最佳电流轨迹弱磁稳定运行,需要采用合适的弱磁控制策略,下面将超前角结合MTPV的复合弱磁控制策略进行分析。
3.3 超前角结合MTPV的复合弱磁控制策略
第3.1、3.2节对弱磁基本原理、最佳弱磁轨迹及最佳切换点进行了详细分析,综合考虑dq 轴电流调节一致性、算法复杂性、是否适用于深度弱磁区等方面,本节将对一种超前角结合MTPV的复合弱磁控制策略进行分析说明,该控制策略实现了dq 轴电流同时控制,且控制算法简洁。
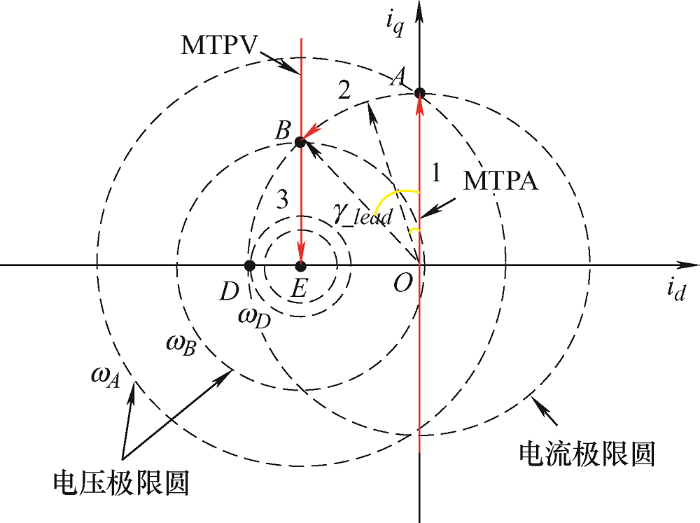
根据SPMSM的弱磁工作原理,在id -iq 坐标系下,当SPMSM到达基速ωA 时,is =is max ,当转速进一步上升,电流矢量将沿电流极限圆逆时针旋转一定角度,该角度即为超前角γ_lead ,如图3 所示。在恒功率弱磁区,由A →B ,d 轴去磁电流逐渐增大,削弱了气隙磁链,保持us =us max 不变,避免了电流调节器饱和,这一过程中,根据is max 、γ_lead 给定id * 、iq * ,控制id 、iq 的过程即为超前角弱磁控制。
图3
(9) $\left\{ \begin{matrix} i_{d}^{*}=i_{s\max }^{{}}\sin {{\gamma }_{\_lead}} \\ i_{q}^{*}=i_{s\max }^{{}}\cos {{\gamma }_{\_lead}} \\ \end{matrix} \right.$
当采用矢量控制弱磁时,此处is max 应为转速环经PI调节器输出值is * 。
当SPMSM转速到达ωB 时,若转速进一步上升,将切换MTPV控制策略,进入深度弱磁区,此时,dq 轴参考电流为
(10) $\left\{ \begin{array}{*{35}{l}} i_{d}^{*}=-\frac{{{\psi }_{f}}}{{{L}_{s}}} \\ i_{q}^{*}=-\frac{{{u}_{s\max }}}{{{\omega }_{e}}{{L}_{s}}} \\ \end{array} \right.$
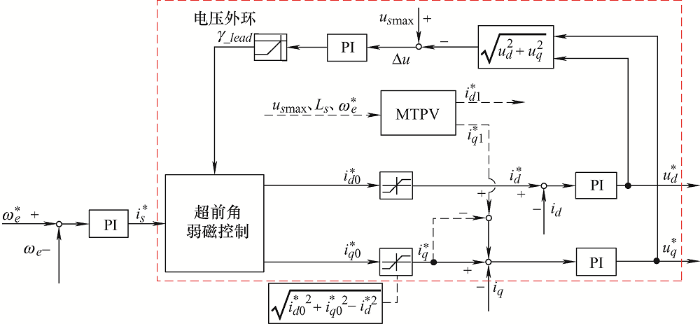
超前角结合MTPV的复合弱磁控制策略的控制框图如图4 所示。
图4
如图4 所示,对SPMSM,在恒转矩区,MTPA控制策略即为id * =0控制策略,对应超前角γ_lead =0,则从恒转矩区到恒功率弱磁区可省略切换开关;转速环经PI调节器输出为is * ,根据is * 和γ_lead 同时调节dq 轴电流可实现恒功率弱磁;当转速达到恒功率弱磁区到深度弱磁区过渡点对应转速,SPMSM进入深度弱磁区,由于式(10)得到的d 轴电流参考i * d 1 =i * d i * d 1 悬空。
4 Simulink仿真验证
为验证第3节理论分析的正确性,通过Matlab Simulink进行仿真验证,仿真用电机参数见表1 。
根据表1 的电机参数,结合MTPA、MTPV控制策略,由式(7)可得ωA 、ωB 分别为
(11) $\left\{ \begin{array}{*{35}{l}} {{\omega }_{A}}=1\ 902.07{ rad}/{s}\; \\ {{\omega }_{B}}=4\ 693.056{ rad}/{s}\; \\ \end{array} \right.$
(12) $\left\{ \begin{array}{*{35}{l}} {{n}_{rA}}=4\ 541.21{ r}/{\min }\; \\ {{n}_{rB}}=11\ 204.67{ r}/{\min }\; \\ \end{array} \right.$
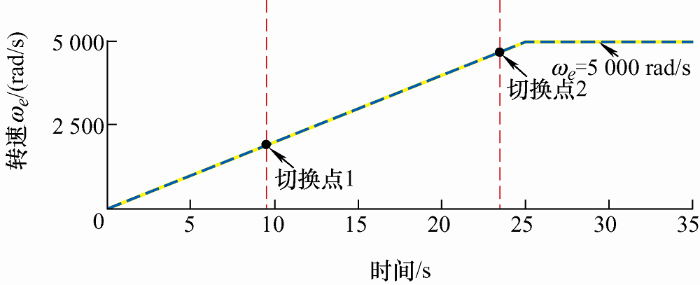
为使SPMSM进入深度弱磁区,给定参考转速ωe =5 000 rad/s,对应机械转速nr =11 937.5 r/min,仿真转速波形如图5 所示,其中,切换点1、2分别对应转速ωA 、ωB 。
图5
根据图5 可知,复合弱磁控制策略下SPMSM的转速跟踪能力较强,所提出的复合弱磁控制策略性能良好。
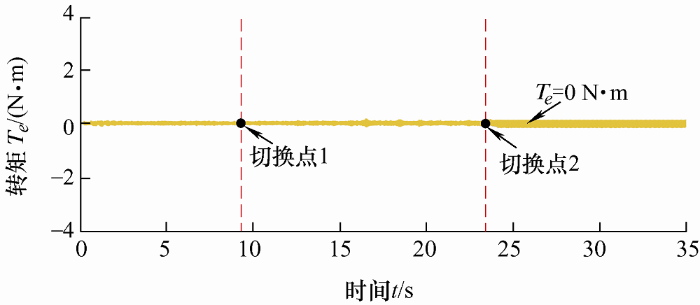
整个速度范围0~11 937.5 r/min内,SPMSM的电磁转矩波形如图6 所示。
图6
根据图6 可知,SPMSM输出电磁转矩仍然在0 N·m附近,与负载匹配,电磁转矩纹波反映了深度弱磁时电流纹波较大,下面将对电流调节器的情况进行分析。
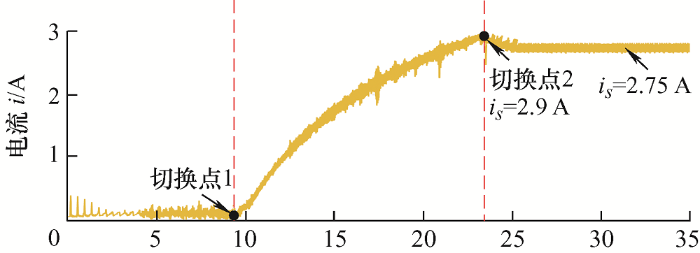
转速环经PI调节器输出的合成电流矢量幅值波形如图7 所示。
图7
根据图7 所示,从切换点2开始,SPMSM运行在深度弱磁区,由于此时电压极限圆位于电流极限圆内,合成电流矢量幅值小于电流极限,即is <is max ,此时is 仍与负载相匹配。然而,由于深度弱磁区不受电流极限圆限制,也就不能再根据电流余量is 和is max 粗略估计带载能力,在该情况下,带载能力会进一步削弱,小于切换点2的电流余量。
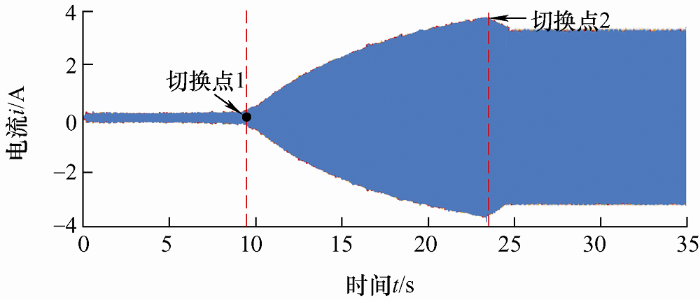
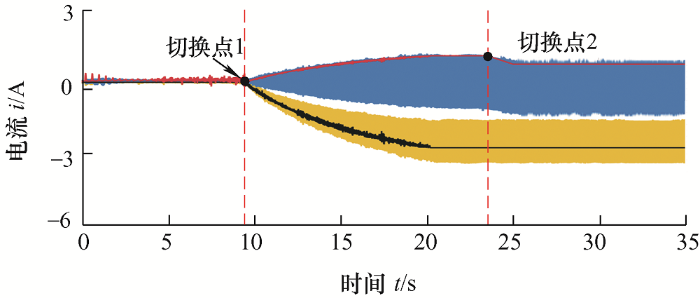
SPMSM三相电流、dq 轴电流波形分别如图8 、图9 所示。
图8
图9
根据图9 可知,深度弱磁时,dq 轴电流纹波较大,由于所用电机为SPMSM,因此,根据MTPV控制策略可得id 不变,iq 减小,与仿真结果一致。
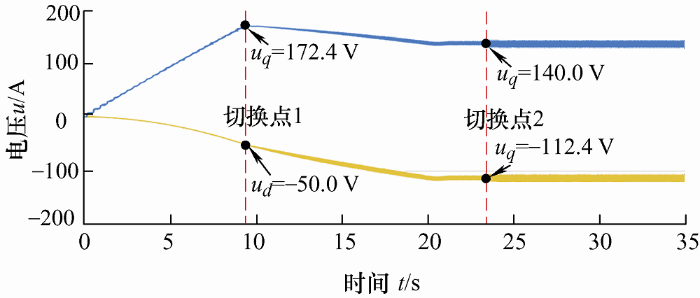
电流环经PI调节器输出的dq 轴电压波形如图10 所示。
图10
根据图10 可以看出,PMSM全速域运行时,当电机转速上升,经过不同工作区域时,ud 、uq 的纹波逐渐增大。切换至深度弱磁区时,合成电压矢量幅值仍等于电压极限,即us =us max ,这意味着在该区域SPMSM受电压极限限制,而ud 、uq 的稳定性反映了弱磁控制性能良好。
5 试验结果及分析
为进一步验证理论和仿真结果,基于远宽Starsim搭建了半实物仿真试验平台,见图11 。半实物仿真由三部分组成:① 电机控制器主功率回路部分通过实时仿真平台Starsim进行模拟;② 超前角结合MTPV弱磁控制算法部分,在采用TI公司TMS320F28379主控芯片的最小系统中编程实现;③ 上位机通信部分实现电机启停及数据显示。
图11
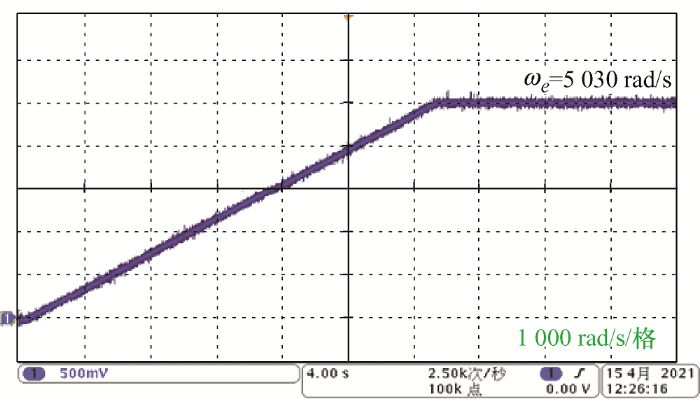
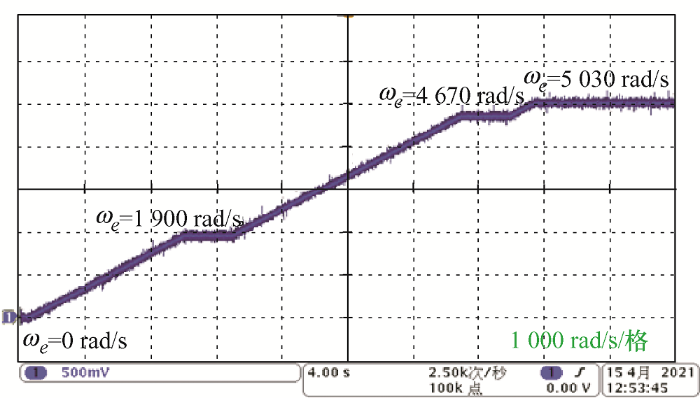
试验用电机参数与仿真一致。当转速超过11 204.67 r/min时,SPMSM进入深度弱磁区,采用复合控制策略,给定参考转速ωe =5 000 rad/s,即nr =11 937.5 r/min,其转速波形以及弱磁时加速和稳态时的电流波形分别如图12 和图13 所示。
图12
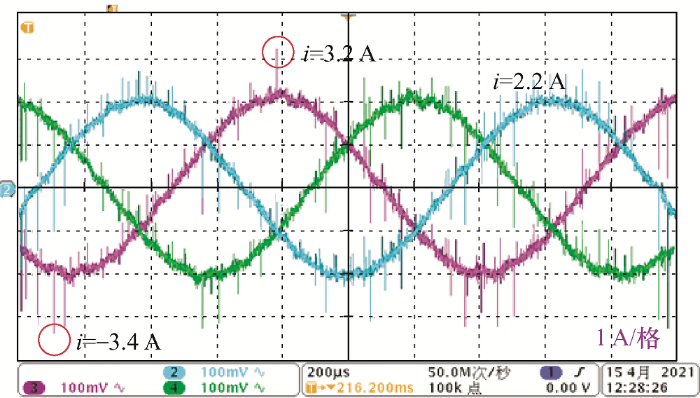
图13
根据图12 、图13 可知,采用超前角结合MTPV控制策略,加速及稳态过程中转速较稳定,转速、电流的变化趋势与仿真相符,弱磁性能较好。稳定时转速ωe =5 030 rad/s,对应机械转速nr = 12 009.13 r/min,转速误差率0.6%,相较于切换前略有所增大。
图14
由图14 不难看出,电流纹波较大,如图中圆圈所示,最高约3.4 A,这将对SPMSM的弱磁性能造成一定影响,随着转速升高,电流纹波将会越来越大,当转速到达恒功率弱磁区到深度弱磁区过渡点对应转速,即仿真中切换点2对应转速,若转速进一步升高,而不切换控制策略,则容易引起电机失稳。
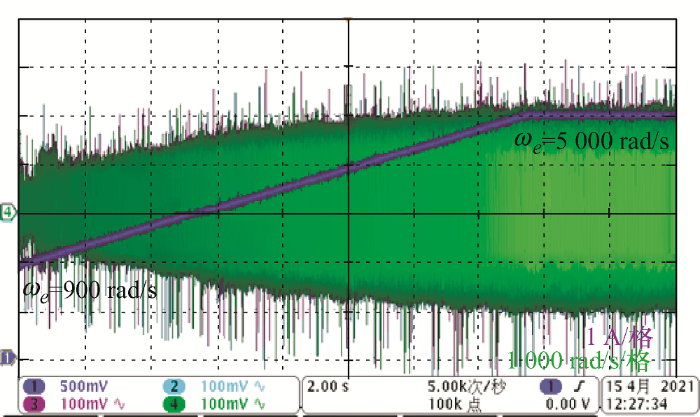
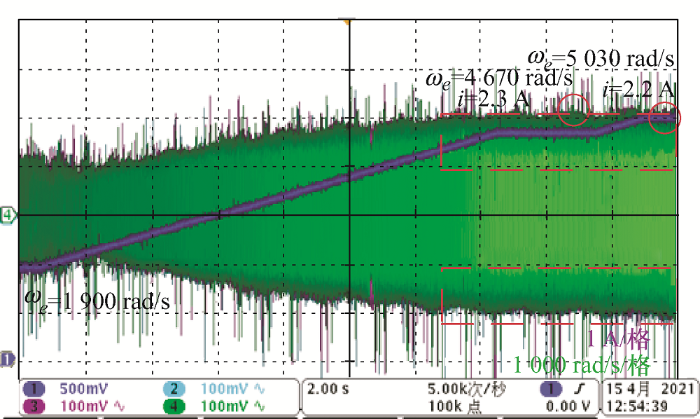
试验结果表明,SPMSM在复合控制策略下弱磁性能较好。为了更好地反映从恒转矩区到恒功率弱磁区、恒功率弱磁区到深度弱磁区切换点转速与电流情况,同时验证控制策略的情况,增加仿真条件设置:在转折点处维持参考转速给定3 s,然后再进行升速,仿真结果如图15 、16 所示。
图15
图16
根据图15 和图16 可知,SPMSM在切换点处能够稳定运行,当SPMSM进入恒功率弱磁区时,随着转速上升,三相电流逐渐增大,当SPMSM进入深度弱磁区时,随着转速上升,三相电流有减小的趋势,如圆圈所示,然而由于电流纹波较大,趋势表现不明显,甚至在负向表现为增大趋势,如虚线框所示,这意味着在深度弱磁区,SPMSM的控制性能将会受到很大影响。由于电压、电流极限圆始终存在相交区域,即使电流纹波较大,电流调节器也能控制SPMSM的电流,使电机能够稳定运行在MTPV曲线上。
6 结论
本文针对SPMSM无限转速系统,在分析失控机理的基础上,基于最佳电流轨迹,提出了一种超前角结合MTPV的复合弱磁控制策略,该控制策略实现了dq 轴电流同时控制,且控制算法简洁。仿真和试验验证了控制策略的有效性。
参考文献
View Option
[1]
胡土雄 , 胡弼 , 王伟 , 等 . 高密度永磁同步电机永磁体失磁特征量分析
[J]. 电气工程学报 , 2019 , 14 (2 ):121 -126 .
[本文引用: 1]
HU Tuxiong HU Bi WANG Wei , et al . Analysis of demagnetization characteristics of permanent magnets in high density permanent magnet synchronous motor
[J]. Journal of Electrical Engineering , 2019 , 14 (2 ):121 -126 .
[本文引用: 1]
[2]
余同 , 刘军 , 孙维凡 . 基于模糊理论的内置式永磁同步电机弱磁控制仿真研究
[J]. 电气工程学报 , 2019 , 14 (1 ):1 -8 .
[本文引用: 1]
YU Tong LIU Jun SUN Weifan . Weak magnetic control of permanent magnet synchronous motor based on fuzzy theory
[J]. Journal of Electrical Engineering , 2019 , 14 (1 ):1 -8 .
[本文引用: 1]
[3]
HAO G YU M BERKER B , et al . Speed range extended maximum torque per ampere control for PM drives considering inverter and motor nonlinearities
[J]. IEEE Transactions on Power Electronics , 2017 , 32 (9 ):7151 -7159 .
DOI:10.1109/TPEL.2016.2630051
URL
[本文引用: 1]
[4]
RENU K KRISHNA KUMARI N KRISHNA D S G . Sensorless control of permanent magnet synchronous motor with flux weakening operation for washing machine application [C]//2018 IEEE International Conference on Power Electronics,Drives and Energy Systems (PEDES),Chennai,India,IEEE, 2018 :1 -6 .
[本文引用: 1]
[5]
陈坤华 , 孙玉坤 , 吉敬华 , 等 . 内嵌式永磁同步电动机弱磁控制分段线性化研究
[J]. 电工技术学报 , 2015 , 30 (24 ):17 -22 .
[本文引用: 2]
CHEN Kunhua SUN Yukun JI Jinghua , et al . The piece-wise linearization research of interior permanent magnet synchronous motors field-weakening control
[J]. Transactions of China Electrotechnical Society , 2015 , 30 (24 ):17 -22 .
[本文引用: 2]
[6]
陈阳生 , 黄碧霞 , 诸自强 , 等 . 电机参数误差对永磁同步电机弱磁性能的影响(英文)
[J]. 中国电机工程学报 , 2008 (6 ):92 -98 .
[本文引用: 2]
CHEN Yangsheng HUANG Bixia ZHU Ziqiang , et al . Influence of inaccuracies in machine parameters on field-weakening performance of PM brushless AC drives
[J]. Proceedings of the CSEE , 2008 (6 ):92 -98 .
[本文引用: 2]
[7]
JUNG S Y HONG J NAM K . Current minimizing torque control of the IPMSM using Ferrari’s method
[J]. IEEE Transactions on Power Electronics , 2013 , 28 (12 ):5603 -5617 .
DOI:10.1109/TPEL.2013.2245920
URL
[本文引用: 2]
[8]
WU J WANG J GAN C , et al . Efficiency optimization of PMSM drives using field-circuit coupled FEM for EV/HEV applications
[J]. IEEE Access , 2018 :15192 -15201 .
[本文引用: 2]
[9]
GUDIVADA R BODNAPU K K VAVILLAPALLI K R . Virtual characterization of interior permanent magnet (IPM) motor for EV traction applications [C]// 2017 IEEE Transportation Electrification Conference (ITEC-India),Pune,India,IEEE, 2017 :1 -4 .
[本文引用: 2]
[10]
KIM D Y LEE J H . Low cost simple look-up table-based PMSM drive considering DC-link voltage variation
[J]. Energies , 2020 , 13 (15 ):3904 .
DOI:10.3390/en13153904
URL
[本文引用: 2]
[11]
申雪 , 赵林峰 , 黄鹤 . EPS用永磁同步电机弱磁控制研究
[J]. 汽车工程学报 , 2016 , 6 (5 ):363 -368 .
[本文引用: 2]
SHEN Xue ZHAO Linfeng HUANG He . Research of flux-weakening control for PMSM used in EPS
[J]. Chinese Journal of Automotive Engineering , 2016 , 6 (5 ):363 -368 .
[本文引用: 2]
[12]
朱磊 , 温旭辉 , 赵峰 , 等 . 永磁同步电机弱磁失控机制及其应对策略研究
[J]. 中国电机工程学报 , 2011 , 31 (18 ):67 -72 .
[本文引用: 2]
ZHU Lei WEN Xuhui ZHAO Feng , et al . Control policies to prevent PMSMs from losing control under field-weakening operation
[J]. Proceedings of the CSEE , 2011 , 31 (18 ):67 -72 .
[本文引用: 2]
[13]
吕德刚 , 薛俊泉 . 表贴式永磁同步电机的超前角弱磁控制
[J]. 哈尔滨理工大学学报 , 2020 , 25 (6 ):40 -45 .
[本文引用: 2]
LÜ Degang XUE Junquan . Flux weakening control of leading angle of surface-mounted permanent magnet synchronous motor
[J]. Journal of Harbin University of Science and Technology , 2020 , 25 (6 ):40 -45 .
[本文引用: 2]
[14]
于家斌 , 秦晓飞 , 郑军 , 等 . 一种改进型超前角弱磁控制算法
[J]. 电机与控制学报 , 2012 , 16 (3 ):101 -106 .
[本文引用: 2]
YU Jiabin QIN Xiaofei ZHENG Jun , et al . Improved leading angle flux weakening control algorithm
[J]. Electric Machines and Control , 2012 , 16 (3 ):101 -106 .
[本文引用: 2]
[15]
燕罗成 , 廖勇 , 陈静怡 . 基于梯度下降法的PMSM转矩脉动抑制策略
[J]. 电力电子技术 , 2019 , 53 (9 ):18 -20 .
[本文引用: 2]
YAN Luocheng LIAO Yong CHEN Jingyi . Torque ripple suppression of PMSM based on gradient descent optimization
[J]. Power Electronics , 2019 , 53 (9 ):18 -20 .
[本文引用: 2]
[16]
方晓春 , 胡太元 , 林飞 , 等 . 基于交直轴电流耦合的单电流调节器永磁同步电机弱磁控制
[J]. 电工技术学报 , 2015 , 30 (2 ):140 -147 .
[本文引用: 2]
FANG Xiaochun HU Taiyuan LIN Fei , et al . Single current regulator flux-weakening control of PMSM based on current cross-coupling effect
[J]. Transactions of China Electrotechnical Society , 2015 , 30 (2 ):140 -147 .
[本文引用: 2]
[17]
迟颂 , 刘聪 , 李雪 , 等 . 基于虚拟阻抗的永磁同步电机弱磁控制
[J]. 电机与控制学报 , 2020 , 24 (11 ):9 -15 .
[本文引用: 2]
CHI Song LIU Cong LI Xue , et al . Flux-weakening control of permanent magnet synchronous motors based on virtual impedance
[J]. Electric Machines and Control , 2020 , 24 (11 ):9 -15 .
[本文引用: 2]
[18]
李雪 , 迟颂 , 刘聪 , 等 . 基于虚拟电阻的永磁同步电机单电流调节器弱磁控制
[J]. 电工技术学报 , 2020 , 35 (5 ):1046 -1054 .
[本文引用: 2]
LI Xue CHI Song LIU Cong , et al . Flux-weakening control with single current regulator of permanent magnet synchronous motor based on virtual resistor
[J]. Transactions of China Electrotechnical Society , 2020 , 35 (5 ):1046 -1054 .
[本文引用: 2]
[19]
ZHANG Z WANG C ZHOU M , et al . Flux-weakening in PMSM drives:Analysis of voltage angle control and the single current controller design
[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics , 2019 , 7 (1 ):437 -445 .
DOI:10.1109/JESTPE.2018.2837668
URL
[本文引用: 2]
[20]
李坷 , 顾欣 , 刘旭东 , 等 . 基于梯度下降法的永磁同步电机单电流弱磁优化控制
[J]. 电工技术学报 , 2016 , 31 (15 ):8 -15 .
[本文引用: 2]
LI Ke GU Xin LIU Xudong , et al . Optimized flux weakening control of IPMSM based on gradient descent method with single current regulator
[J]. Transactions of China Electrotechnical Society , 2016 , 31 (15 ):8 -15 .
[本文引用: 2]
高密度永磁同步电机永磁体失磁特征量分析
1
2019
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
Analysis of demagnetization characteristics of permanent magnets in high density permanent magnet synchronous motor
1
2019
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
基于模糊理论的内置式永磁同步电机弱磁控制仿真研究
1
2019
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
Weak magnetic control of permanent magnet synchronous motor based on fuzzy theory
1
2019
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
Speed range extended maximum torque per ampere control for PM drives considering inverter and motor nonlinearities
1
2017
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
1
2018
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
内嵌式永磁同步电动机弱磁控制分段线性化研究
2
2015
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 前馈开环法主要根据电机模型和准确电机参数,计算参考弱磁电流轨迹以实现弱磁,结构简单、动态响应快.文献[5 ]对弱磁区域进行分块,通过线性拟合、以直代曲,简化了弱磁区域电流轨迹的计算.文献[6 ]首先通过转速判断电机是否要进行弱磁控制,然后对弱磁时的dq 轴电流进行前馈补偿以实现转速提高.文献[7 ]通过Ferrari法将弱磁区域电流轨迹表示为四阶方程,并给出相应的解析解,基于电机参数构建交、直轴电感与交、直轴电流的查找表用于转矩控制,使得控制精度得以提高,如果考虑铁损会获得更精确的参考电流轨迹解析解.然而由于前馈开环法的本质是开环控制结构,且对电机参数过于依赖,因此鲁棒性较差,在预试验次数不多、在线参数辨识有困难的情况下,将难以获得准确的电机参数,进而使实际应用受到了很大限制. ...
The piece-wise linearization research of interior permanent magnet synchronous motors field-weakening control
2
2015
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 前馈开环法主要根据电机模型和准确电机参数,计算参考弱磁电流轨迹以实现弱磁,结构简单、动态响应快.文献[5 ]对弱磁区域进行分块,通过线性拟合、以直代曲,简化了弱磁区域电流轨迹的计算.文献[6 ]首先通过转速判断电机是否要进行弱磁控制,然后对弱磁时的dq 轴电流进行前馈补偿以实现转速提高.文献[7 ]通过Ferrari法将弱磁区域电流轨迹表示为四阶方程,并给出相应的解析解,基于电机参数构建交、直轴电感与交、直轴电流的查找表用于转矩控制,使得控制精度得以提高,如果考虑铁损会获得更精确的参考电流轨迹解析解.然而由于前馈开环法的本质是开环控制结构,且对电机参数过于依赖,因此鲁棒性较差,在预试验次数不多、在线参数辨识有困难的情况下,将难以获得准确的电机参数,进而使实际应用受到了很大限制. ...
电机参数误差对永磁同步电机弱磁性能的影响(英文)
2
2008
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 前馈开环法主要根据电机模型和准确电机参数,计算参考弱磁电流轨迹以实现弱磁,结构简单、动态响应快.文献[5 ]对弱磁区域进行分块,通过线性拟合、以直代曲,简化了弱磁区域电流轨迹的计算.文献[6 ]首先通过转速判断电机是否要进行弱磁控制,然后对弱磁时的dq 轴电流进行前馈补偿以实现转速提高.文献[7 ]通过Ferrari法将弱磁区域电流轨迹表示为四阶方程,并给出相应的解析解,基于电机参数构建交、直轴电感与交、直轴电流的查找表用于转矩控制,使得控制精度得以提高,如果考虑铁损会获得更精确的参考电流轨迹解析解.然而由于前馈开环法的本质是开环控制结构,且对电机参数过于依赖,因此鲁棒性较差,在预试验次数不多、在线参数辨识有困难的情况下,将难以获得准确的电机参数,进而使实际应用受到了很大限制. ...
Influence of inaccuracies in machine parameters on field-weakening performance of PM brushless AC drives
2
2008
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 前馈开环法主要根据电机模型和准确电机参数,计算参考弱磁电流轨迹以实现弱磁,结构简单、动态响应快.文献[5 ]对弱磁区域进行分块,通过线性拟合、以直代曲,简化了弱磁区域电流轨迹的计算.文献[6 ]首先通过转速判断电机是否要进行弱磁控制,然后对弱磁时的dq 轴电流进行前馈补偿以实现转速提高.文献[7 ]通过Ferrari法将弱磁区域电流轨迹表示为四阶方程,并给出相应的解析解,基于电机参数构建交、直轴电感与交、直轴电流的查找表用于转矩控制,使得控制精度得以提高,如果考虑铁损会获得更精确的参考电流轨迹解析解.然而由于前馈开环法的本质是开环控制结构,且对电机参数过于依赖,因此鲁棒性较差,在预试验次数不多、在线参数辨识有困难的情况下,将难以获得准确的电机参数,进而使实际应用受到了很大限制. ...
Current minimizing torque control of the IPMSM using Ferrari’s method
2
2013
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 前馈开环法主要根据电机模型和准确电机参数,计算参考弱磁电流轨迹以实现弱磁,结构简单、动态响应快.文献[5 ]对弱磁区域进行分块,通过线性拟合、以直代曲,简化了弱磁区域电流轨迹的计算.文献[6 ]首先通过转速判断电机是否要进行弱磁控制,然后对弱磁时的dq 轴电流进行前馈补偿以实现转速提高.文献[7 ]通过Ferrari法将弱磁区域电流轨迹表示为四阶方程,并给出相应的解析解,基于电机参数构建交、直轴电感与交、直轴电流的查找表用于转矩控制,使得控制精度得以提高,如果考虑铁损会获得更精确的参考电流轨迹解析解.然而由于前馈开环法的本质是开环控制结构,且对电机参数过于依赖,因此鲁棒性较差,在预试验次数不多、在线参数辨识有困难的情况下,将难以获得准确的电机参数,进而使实际应用受到了很大限制. ...
Efficiency optimization of PMSM drives using field-circuit coupled FEM for EV/HEV applications
2
2018
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 查表法通常根据大量试验数据,构建dq 轴电流、电感等查找表,以提高动态响应速度及鲁棒性.文献[8 ]提出了一种类似超前角的变弱磁角控制策略,通过场路耦合时间步进有限元法提供PMSM驱动电流参考,构建查找表,实现了PMSM的弱磁稳定运行,查表法运算量大.文献[9 ]通过二维有限元分析(2D finite element analysis,FEA),构造了不同转速、转矩下的dq 轴电流虚拟表,在样机测试中取得了预期效果.文献[10 ]提出考虑转矩、磁链及直流母线电压变化的dq 轴电流查找表,减少了计算量,且在弱磁时表现良好.然而,查表法仍需要大量离线测试,且可移植性差. ...
2
2017
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 查表法通常根据大量试验数据,构建dq 轴电流、电感等查找表,以提高动态响应速度及鲁棒性.文献[8 ]提出了一种类似超前角的变弱磁角控制策略,通过场路耦合时间步进有限元法提供PMSM驱动电流参考,构建查找表,实现了PMSM的弱磁稳定运行,查表法运算量大.文献[9 ]通过二维有限元分析(2D finite element analysis,FEA),构造了不同转速、转矩下的dq 轴电流虚拟表,在样机测试中取得了预期效果.文献[10 ]提出考虑转矩、磁链及直流母线电压变化的dq 轴电流查找表,减少了计算量,且在弱磁时表现良好.然而,查表法仍需要大量离线测试,且可移植性差. ...
Low cost simple look-up table-based PMSM drive considering DC-link voltage variation
2
2020
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 查表法通常根据大量试验数据,构建dq 轴电流、电感等查找表,以提高动态响应速度及鲁棒性.文献[8 ]提出了一种类似超前角的变弱磁角控制策略,通过场路耦合时间步进有限元法提供PMSM驱动电流参考,构建查找表,实现了PMSM的弱磁稳定运行,查表法运算量大.文献[9 ]通过二维有限元分析(2D finite element analysis,FEA),构造了不同转速、转矩下的dq 轴电流虚拟表,在样机测试中取得了预期效果.文献[10 ]提出考虑转矩、磁链及直流母线电压变化的dq 轴电流查找表,减少了计算量,且在弱磁时表现良好.然而,查表法仍需要大量离线测试,且可移植性差. ...
EPS用永磁同步电机弱磁控制研究
2
2016
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 电压幅值比较法通过比较实际电压与逆变器输出电压极限,通过电压差增加闭环反馈,调节dq 轴电流,保持输出电压稳定在电压极限附近.根据电压差值经PI调节器输出物理量的不同,一般来说可分为负id 补偿法、超前角法和梯度下降法.负id 补偿法参数鲁棒性强,算法简单,但存在一定局限性,电压外环PI调节器输出为d 轴电流增量Δid ,d 轴电流超前q 轴电流变化,且当电机处于深度弱磁时,由于d 轴电流只能朝一个方向调节,即id 更负,则电流调节器容易饱和而引起失控[11 -12 ] .文献[13 ]在传统负id 补偿法的基础上进行改进,通过d 轴电流限幅前后的差值对q 轴电流进行补偿,拓宽了调速范围,但没有对补偿标准进行说明,补偿值的不合理可能会引起电机失控.对超前角法来说,电压外环PI调节器输出为角度量,dq 轴电流根据定子电流幅值和超前角同时调节,id 变化的同时iq 也变化,对于SPMSM,电机由恒转矩区向恒功率弱磁区过渡时,可省略切换开关,然而,超前角法也只能朝一个方向调节id ,一旦进入深度弱磁区,将存在失控风险[14 ] .与负id 补偿法、超前角法不同的是,梯度下降法的电压外环不含PI调节器,根据电压差、转矩方向及电压极限圆收缩方向,在不同弱磁区域同时输出相应dq 轴电流的修正值,有效地减小了深度弱磁区失控的风险,减小了转矩脉动,提高了稳定性,然而该算法相对复杂,修正值受电机参数影响[15 ] . ...
Research of flux-weakening control for PMSM used in EPS
2
2016
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 电压幅值比较法通过比较实际电压与逆变器输出电压极限,通过电压差增加闭环反馈,调节dq 轴电流,保持输出电压稳定在电压极限附近.根据电压差值经PI调节器输出物理量的不同,一般来说可分为负id 补偿法、超前角法和梯度下降法.负id 补偿法参数鲁棒性强,算法简单,但存在一定局限性,电压外环PI调节器输出为d 轴电流增量Δid ,d 轴电流超前q 轴电流变化,且当电机处于深度弱磁时,由于d 轴电流只能朝一个方向调节,即id 更负,则电流调节器容易饱和而引起失控[11 -12 ] .文献[13 ]在传统负id 补偿法的基础上进行改进,通过d 轴电流限幅前后的差值对q 轴电流进行补偿,拓宽了调速范围,但没有对补偿标准进行说明,补偿值的不合理可能会引起电机失控.对超前角法来说,电压外环PI调节器输出为角度量,dq 轴电流根据定子电流幅值和超前角同时调节,id 变化的同时iq 也变化,对于SPMSM,电机由恒转矩区向恒功率弱磁区过渡时,可省略切换开关,然而,超前角法也只能朝一个方向调节id ,一旦进入深度弱磁区,将存在失控风险[14 ] .与负id 补偿法、超前角法不同的是,梯度下降法的电压外环不含PI调节器,根据电压差、转矩方向及电压极限圆收缩方向,在不同弱磁区域同时输出相应dq 轴电流的修正值,有效地减小了深度弱磁区失控的风险,减小了转矩脉动,提高了稳定性,然而该算法相对复杂,修正值受电机参数影响[15 ] . ...
永磁同步电机弱磁失控机制及其应对策略研究
2
2011
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 电压幅值比较法通过比较实际电压与逆变器输出电压极限,通过电压差增加闭环反馈,调节dq 轴电流,保持输出电压稳定在电压极限附近.根据电压差值经PI调节器输出物理量的不同,一般来说可分为负id 补偿法、超前角法和梯度下降法.负id 补偿法参数鲁棒性强,算法简单,但存在一定局限性,电压外环PI调节器输出为d 轴电流增量Δid ,d 轴电流超前q 轴电流变化,且当电机处于深度弱磁时,由于d 轴电流只能朝一个方向调节,即id 更负,则电流调节器容易饱和而引起失控[11 -12 ] .文献[13 ]在传统负id 补偿法的基础上进行改进,通过d 轴电流限幅前后的差值对q 轴电流进行补偿,拓宽了调速范围,但没有对补偿标准进行说明,补偿值的不合理可能会引起电机失控.对超前角法来说,电压外环PI调节器输出为角度量,dq 轴电流根据定子电流幅值和超前角同时调节,id 变化的同时iq 也变化,对于SPMSM,电机由恒转矩区向恒功率弱磁区过渡时,可省略切换开关,然而,超前角法也只能朝一个方向调节id ,一旦进入深度弱磁区,将存在失控风险[14 ] .与负id 补偿法、超前角法不同的是,梯度下降法的电压外环不含PI调节器,根据电压差、转矩方向及电压极限圆收缩方向,在不同弱磁区域同时输出相应dq 轴电流的修正值,有效地减小了深度弱磁区失控的风险,减小了转矩脉动,提高了稳定性,然而该算法相对复杂,修正值受电机参数影响[15 ] . ...
Control policies to prevent PMSMs from losing control under field-weakening operation
2
2011
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 电压幅值比较法通过比较实际电压与逆变器输出电压极限,通过电压差增加闭环反馈,调节dq 轴电流,保持输出电压稳定在电压极限附近.根据电压差值经PI调节器输出物理量的不同,一般来说可分为负id 补偿法、超前角法和梯度下降法.负id 补偿法参数鲁棒性强,算法简单,但存在一定局限性,电压外环PI调节器输出为d 轴电流增量Δid ,d 轴电流超前q 轴电流变化,且当电机处于深度弱磁时,由于d 轴电流只能朝一个方向调节,即id 更负,则电流调节器容易饱和而引起失控[11 -12 ] .文献[13 ]在传统负id 补偿法的基础上进行改进,通过d 轴电流限幅前后的差值对q 轴电流进行补偿,拓宽了调速范围,但没有对补偿标准进行说明,补偿值的不合理可能会引起电机失控.对超前角法来说,电压外环PI调节器输出为角度量,dq 轴电流根据定子电流幅值和超前角同时调节,id 变化的同时iq 也变化,对于SPMSM,电机由恒转矩区向恒功率弱磁区过渡时,可省略切换开关,然而,超前角法也只能朝一个方向调节id ,一旦进入深度弱磁区,将存在失控风险[14 ] .与负id 补偿法、超前角法不同的是,梯度下降法的电压外环不含PI调节器,根据电压差、转矩方向及电压极限圆收缩方向,在不同弱磁区域同时输出相应dq 轴电流的修正值,有效地减小了深度弱磁区失控的风险,减小了转矩脉动,提高了稳定性,然而该算法相对复杂,修正值受电机参数影响[15 ] . ...
表贴式永磁同步电机的超前角弱磁控制
2
2020
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 电压幅值比较法通过比较实际电压与逆变器输出电压极限,通过电压差增加闭环反馈,调节dq 轴电流,保持输出电压稳定在电压极限附近.根据电压差值经PI调节器输出物理量的不同,一般来说可分为负id 补偿法、超前角法和梯度下降法.负id 补偿法参数鲁棒性强,算法简单,但存在一定局限性,电压外环PI调节器输出为d 轴电流增量Δid ,d 轴电流超前q 轴电流变化,且当电机处于深度弱磁时,由于d 轴电流只能朝一个方向调节,即id 更负,则电流调节器容易饱和而引起失控[11 -12 ] .文献[13 ]在传统负id 补偿法的基础上进行改进,通过d 轴电流限幅前后的差值对q 轴电流进行补偿,拓宽了调速范围,但没有对补偿标准进行说明,补偿值的不合理可能会引起电机失控.对超前角法来说,电压外环PI调节器输出为角度量,dq 轴电流根据定子电流幅值和超前角同时调节,id 变化的同时iq 也变化,对于SPMSM,电机由恒转矩区向恒功率弱磁区过渡时,可省略切换开关,然而,超前角法也只能朝一个方向调节id ,一旦进入深度弱磁区,将存在失控风险[14 ] .与负id 补偿法、超前角法不同的是,梯度下降法的电压外环不含PI调节器,根据电压差、转矩方向及电压极限圆收缩方向,在不同弱磁区域同时输出相应dq 轴电流的修正值,有效地减小了深度弱磁区失控的风险,减小了转矩脉动,提高了稳定性,然而该算法相对复杂,修正值受电机参数影响[15 ] . ...
Flux weakening control of leading angle of surface-mounted permanent magnet synchronous motor
2
2020
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 电压幅值比较法通过比较实际电压与逆变器输出电压极限,通过电压差增加闭环反馈,调节dq 轴电流,保持输出电压稳定在电压极限附近.根据电压差值经PI调节器输出物理量的不同,一般来说可分为负id 补偿法、超前角法和梯度下降法.负id 补偿法参数鲁棒性强,算法简单,但存在一定局限性,电压外环PI调节器输出为d 轴电流增量Δid ,d 轴电流超前q 轴电流变化,且当电机处于深度弱磁时,由于d 轴电流只能朝一个方向调节,即id 更负,则电流调节器容易饱和而引起失控[11 -12 ] .文献[13 ]在传统负id 补偿法的基础上进行改进,通过d 轴电流限幅前后的差值对q 轴电流进行补偿,拓宽了调速范围,但没有对补偿标准进行说明,补偿值的不合理可能会引起电机失控.对超前角法来说,电压外环PI调节器输出为角度量,dq 轴电流根据定子电流幅值和超前角同时调节,id 变化的同时iq 也变化,对于SPMSM,电机由恒转矩区向恒功率弱磁区过渡时,可省略切换开关,然而,超前角法也只能朝一个方向调节id ,一旦进入深度弱磁区,将存在失控风险[14 ] .与负id 补偿法、超前角法不同的是,梯度下降法的电压外环不含PI调节器,根据电压差、转矩方向及电压极限圆收缩方向,在不同弱磁区域同时输出相应dq 轴电流的修正值,有效地减小了深度弱磁区失控的风险,减小了转矩脉动,提高了稳定性,然而该算法相对复杂,修正值受电机参数影响[15 ] . ...
一种改进型超前角弱磁控制算法
2
2012
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 电压幅值比较法通过比较实际电压与逆变器输出电压极限,通过电压差增加闭环反馈,调节dq 轴电流,保持输出电压稳定在电压极限附近.根据电压差值经PI调节器输出物理量的不同,一般来说可分为负id 补偿法、超前角法和梯度下降法.负id 补偿法参数鲁棒性强,算法简单,但存在一定局限性,电压外环PI调节器输出为d 轴电流增量Δid ,d 轴电流超前q 轴电流变化,且当电机处于深度弱磁时,由于d 轴电流只能朝一个方向调节,即id 更负,则电流调节器容易饱和而引起失控[11 -12 ] .文献[13 ]在传统负id 补偿法的基础上进行改进,通过d 轴电流限幅前后的差值对q 轴电流进行补偿,拓宽了调速范围,但没有对补偿标准进行说明,补偿值的不合理可能会引起电机失控.对超前角法来说,电压外环PI调节器输出为角度量,dq 轴电流根据定子电流幅值和超前角同时调节,id 变化的同时iq 也变化,对于SPMSM,电机由恒转矩区向恒功率弱磁区过渡时,可省略切换开关,然而,超前角法也只能朝一个方向调节id ,一旦进入深度弱磁区,将存在失控风险[14 ] .与负id 补偿法、超前角法不同的是,梯度下降法的电压外环不含PI调节器,根据电压差、转矩方向及电压极限圆收缩方向,在不同弱磁区域同时输出相应dq 轴电流的修正值,有效地减小了深度弱磁区失控的风险,减小了转矩脉动,提高了稳定性,然而该算法相对复杂,修正值受电机参数影响[15 ] . ...
Improved leading angle flux weakening control algorithm
2
2012
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 电压幅值比较法通过比较实际电压与逆变器输出电压极限,通过电压差增加闭环反馈,调节dq 轴电流,保持输出电压稳定在电压极限附近.根据电压差值经PI调节器输出物理量的不同,一般来说可分为负id 补偿法、超前角法和梯度下降法.负id 补偿法参数鲁棒性强,算法简单,但存在一定局限性,电压外环PI调节器输出为d 轴电流增量Δid ,d 轴电流超前q 轴电流变化,且当电机处于深度弱磁时,由于d 轴电流只能朝一个方向调节,即id 更负,则电流调节器容易饱和而引起失控[11 -12 ] .文献[13 ]在传统负id 补偿法的基础上进行改进,通过d 轴电流限幅前后的差值对q 轴电流进行补偿,拓宽了调速范围,但没有对补偿标准进行说明,补偿值的不合理可能会引起电机失控.对超前角法来说,电压外环PI调节器输出为角度量,dq 轴电流根据定子电流幅值和超前角同时调节,id 变化的同时iq 也变化,对于SPMSM,电机由恒转矩区向恒功率弱磁区过渡时,可省略切换开关,然而,超前角法也只能朝一个方向调节id ,一旦进入深度弱磁区,将存在失控风险[14 ] .与负id 补偿法、超前角法不同的是,梯度下降法的电压外环不含PI调节器,根据电压差、转矩方向及电压极限圆收缩方向,在不同弱磁区域同时输出相应dq 轴电流的修正值,有效地减小了深度弱磁区失控的风险,减小了转矩脉动,提高了稳定性,然而该算法相对复杂,修正值受电机参数影响[15 ] . ...
基于梯度下降法的PMSM转矩脉动抑制策略
2
2019
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 电压幅值比较法通过比较实际电压与逆变器输出电压极限,通过电压差增加闭环反馈,调节dq 轴电流,保持输出电压稳定在电压极限附近.根据电压差值经PI调节器输出物理量的不同,一般来说可分为负id 补偿法、超前角法和梯度下降法.负id 补偿法参数鲁棒性强,算法简单,但存在一定局限性,电压外环PI调节器输出为d 轴电流增量Δid ,d 轴电流超前q 轴电流变化,且当电机处于深度弱磁时,由于d 轴电流只能朝一个方向调节,即id 更负,则电流调节器容易饱和而引起失控[11 -12 ] .文献[13 ]在传统负id 补偿法的基础上进行改进,通过d 轴电流限幅前后的差值对q 轴电流进行补偿,拓宽了调速范围,但没有对补偿标准进行说明,补偿值的不合理可能会引起电机失控.对超前角法来说,电压外环PI调节器输出为角度量,dq 轴电流根据定子电流幅值和超前角同时调节,id 变化的同时iq 也变化,对于SPMSM,电机由恒转矩区向恒功率弱磁区过渡时,可省略切换开关,然而,超前角法也只能朝一个方向调节id ,一旦进入深度弱磁区,将存在失控风险[14 ] .与负id 补偿法、超前角法不同的是,梯度下降法的电压外环不含PI调节器,根据电压差、转矩方向及电压极限圆收缩方向,在不同弱磁区域同时输出相应dq 轴电流的修正值,有效地减小了深度弱磁区失控的风险,减小了转矩脉动,提高了稳定性,然而该算法相对复杂,修正值受电机参数影响[15 ] . ...
Torque ripple suppression of PMSM based on gradient descent optimization
2
2019
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 电压幅值比较法通过比较实际电压与逆变器输出电压极限,通过电压差增加闭环反馈,调节dq 轴电流,保持输出电压稳定在电压极限附近.根据电压差值经PI调节器输出物理量的不同,一般来说可分为负id 补偿法、超前角法和梯度下降法.负id 补偿法参数鲁棒性强,算法简单,但存在一定局限性,电压外环PI调节器输出为d 轴电流增量Δid ,d 轴电流超前q 轴电流变化,且当电机处于深度弱磁时,由于d 轴电流只能朝一个方向调节,即id 更负,则电流调节器容易饱和而引起失控[11 -12 ] .文献[13 ]在传统负id 补偿法的基础上进行改进,通过d 轴电流限幅前后的差值对q 轴电流进行补偿,拓宽了调速范围,但没有对补偿标准进行说明,补偿值的不合理可能会引起电机失控.对超前角法来说,电压外环PI调节器输出为角度量,dq 轴电流根据定子电流幅值和超前角同时调节,id 变化的同时iq 也变化,对于SPMSM,电机由恒转矩区向恒功率弱磁区过渡时,可省略切换开关,然而,超前角法也只能朝一个方向调节id ,一旦进入深度弱磁区,将存在失控风险[14 ] .与负id 补偿法、超前角法不同的是,梯度下降法的电压外环不含PI调节器,根据电压差、转矩方向及电压极限圆收缩方向,在不同弱磁区域同时输出相应dq 轴电流的修正值,有效地减小了深度弱磁区失控的风险,减小了转矩脉动,提高了稳定性,然而该算法相对复杂,修正值受电机参数影响[15 ] . ...
基于交直轴电流耦合的单电流调节器永磁同步电机弱磁控制
2
2015
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 单电流调节器法的本质是电压角控制,主要利用高速时dq 轴之间的交叉耦合效应,通过一个电流调节器达到同时完成速度调节及弱磁控制的目的,结构相对更为简单、动态响应快,避免了传统弱磁控制结构的双电流调节器在深度弱磁情况下易于饱和的问题,然而逆变器输出电压利用率下降,需要平衡带载与效率的指标要求,且由于低速时耦合效应不强,往往需要切换控制策略进行单电流调节器控制[16 ⇓ -18 ] .文献[19 ]所提出的单电流调节器法,其弱磁参考电压由反馈电流计算得到,在考虑效率的情况下设计了弱磁电流轨迹,提高了带载能力,然而电压利用率仍比较低,仍需要考虑低速到弱磁的切换问题. ...
Single current regulator flux-weakening control of PMSM based on current cross-coupling effect
2
2015
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 单电流调节器法的本质是电压角控制,主要利用高速时dq 轴之间的交叉耦合效应,通过一个电流调节器达到同时完成速度调节及弱磁控制的目的,结构相对更为简单、动态响应快,避免了传统弱磁控制结构的双电流调节器在深度弱磁情况下易于饱和的问题,然而逆变器输出电压利用率下降,需要平衡带载与效率的指标要求,且由于低速时耦合效应不强,往往需要切换控制策略进行单电流调节器控制[16 ⇓ -18 ] .文献[19 ]所提出的单电流调节器法,其弱磁参考电压由反馈电流计算得到,在考虑效率的情况下设计了弱磁电流轨迹,提高了带载能力,然而电压利用率仍比较低,仍需要考虑低速到弱磁的切换问题. ...
基于虚拟阻抗的永磁同步电机弱磁控制
2
2020
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 单电流调节器法的本质是电压角控制,主要利用高速时dq 轴之间的交叉耦合效应,通过一个电流调节器达到同时完成速度调节及弱磁控制的目的,结构相对更为简单、动态响应快,避免了传统弱磁控制结构的双电流调节器在深度弱磁情况下易于饱和的问题,然而逆变器输出电压利用率下降,需要平衡带载与效率的指标要求,且由于低速时耦合效应不强,往往需要切换控制策略进行单电流调节器控制[16 ⇓ -18 ] .文献[19 ]所提出的单电流调节器法,其弱磁参考电压由反馈电流计算得到,在考虑效率的情况下设计了弱磁电流轨迹,提高了带载能力,然而电压利用率仍比较低,仍需要考虑低速到弱磁的切换问题. ...
Flux-weakening control of permanent magnet synchronous motors based on virtual impedance
2
2020
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 单电流调节器法的本质是电压角控制,主要利用高速时dq 轴之间的交叉耦合效应,通过一个电流调节器达到同时完成速度调节及弱磁控制的目的,结构相对更为简单、动态响应快,避免了传统弱磁控制结构的双电流调节器在深度弱磁情况下易于饱和的问题,然而逆变器输出电压利用率下降,需要平衡带载与效率的指标要求,且由于低速时耦合效应不强,往往需要切换控制策略进行单电流调节器控制[16 ⇓ -18 ] .文献[19 ]所提出的单电流调节器法,其弱磁参考电压由反馈电流计算得到,在考虑效率的情况下设计了弱磁电流轨迹,提高了带载能力,然而电压利用率仍比较低,仍需要考虑低速到弱磁的切换问题. ...
基于虚拟电阻的永磁同步电机单电流调节器弱磁控制
2
2020
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 单电流调节器法的本质是电压角控制,主要利用高速时dq 轴之间的交叉耦合效应,通过一个电流调节器达到同时完成速度调节及弱磁控制的目的,结构相对更为简单、动态响应快,避免了传统弱磁控制结构的双电流调节器在深度弱磁情况下易于饱和的问题,然而逆变器输出电压利用率下降,需要平衡带载与效率的指标要求,且由于低速时耦合效应不强,往往需要切换控制策略进行单电流调节器控制[16 ⇓ -18 ] .文献[19 ]所提出的单电流调节器法,其弱磁参考电压由反馈电流计算得到,在考虑效率的情况下设计了弱磁电流轨迹,提高了带载能力,然而电压利用率仍比较低,仍需要考虑低速到弱磁的切换问题. ...
Flux-weakening control with single current regulator of permanent magnet synchronous motor based on virtual resistor
2
2020
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 单电流调节器法的本质是电压角控制,主要利用高速时dq 轴之间的交叉耦合效应,通过一个电流调节器达到同时完成速度调节及弱磁控制的目的,结构相对更为简单、动态响应快,避免了传统弱磁控制结构的双电流调节器在深度弱磁情况下易于饱和的问题,然而逆变器输出电压利用率下降,需要平衡带载与效率的指标要求,且由于低速时耦合效应不强,往往需要切换控制策略进行单电流调节器控制[16 ⇓ -18 ] .文献[19 ]所提出的单电流调节器法,其弱磁参考电压由反馈电流计算得到,在考虑效率的情况下设计了弱磁电流轨迹,提高了带载能力,然而电压利用率仍比较低,仍需要考虑低速到弱磁的切换问题. ...
Flux-weakening in PMSM drives:Analysis of voltage angle control and the single current controller design
2
2019
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 单电流调节器法的本质是电压角控制,主要利用高速时dq 轴之间的交叉耦合效应,通过一个电流调节器达到同时完成速度调节及弱磁控制的目的,结构相对更为简单、动态响应快,避免了传统弱磁控制结构的双电流调节器在深度弱磁情况下易于饱和的问题,然而逆变器输出电压利用率下降,需要平衡带载与效率的指标要求,且由于低速时耦合效应不强,往往需要切换控制策略进行单电流调节器控制[16 ⇓ -18 ] .文献[19 ]所提出的单电流调节器法,其弱磁参考电压由反馈电流计算得到,在考虑效率的情况下设计了弱磁电流轨迹,提高了带载能力,然而电压利用率仍比较低,仍需要考虑低速到弱磁的切换问题. ...
基于梯度下降法的永磁同步电机单电流弱磁优化控制
2
2016
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 混合弱磁控制法通常结合两种及以上的控制方法,以达到更高的性能指标,这类算法通常比较复杂,涉及到查表法的方法都存在可移植性差的问题.文献[20 ]先后确定了恒转矩方向和电流下降方向,根据电流最小的原则对q 轴电压进行调节,结合了梯度下降法和单电流控制法,实现了弱磁效率的提高,算法相对比较复杂. ...
Optimized flux weakening control of IPMSM based on gradient descent method with single current regulator
2
2016
... 文献[1 ]从本体结构角度分析了PMSM的失磁故障.为拓宽弱磁调速范围,避免失磁,从控制角度通常基于最佳电流轨迹,将PMSM无限转速系统划分为基速以下的恒转矩区和基速以上的恒功率弱磁区、深度弱磁区[2 ] .基速以下通常采用MTPA控制策略,以获得最大输出转矩[3 -4 ] .基速以上PMSM的弱磁控制策略主要有前馈开环法[5 ⇓ -7 ] 、查表法[8 ⇓ -10 ] 、电压幅值比较法[11 ⇓ ⇓ ⇓ -15 ] 、单电流调节器法[16 ⇓ ⇓ -19 ] 及混合弱磁控制方法等[20 ] . ...
... 混合弱磁控制法通常结合两种及以上的控制方法,以达到更高的性能指标,这类算法通常比较复杂,涉及到查表法的方法都存在可移植性差的问题.文献[20 ]先后确定了恒转矩方向和电流下降方向,根据电流最小的原则对q 轴电压进行调节,结合了梯度下降法和单电流控制法,实现了弱磁效率的提高,算法相对比较复杂. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}