1 引言
随着国防特种装备如军舰舰船、电动飞机及多功能战车的全电化发展,以发电机为核心的直流电源系统受到广泛关注。受可靠性、装备空间以及低压大功率的限制,多相永磁同步发电机(Permanent magnet synchronous generator,PMSG)成为首要选择[1 ⇓ ⇓ -4 ] 。其中,双三相PMSG因具有较小的转矩和电流脉动,具有很好的应用前景[5 ] 。
与三相电机不同,多相电机由于相数的增加,导致电机系统存在多个谐波子空间,在增加了控制自由度的同时也加大了控制难度。当采用传统矢量控制时,通常需要多个比例积分或比例谐振控制器对每个谐波平面进行控制[6 ⇓ ⇓ -9 ] ,控制系统复杂且参数整定困难,不易于系统的实现。近年来,模型预测控制(Model predictive control,MPC)因其原理简单、响应迅速、无需内环电流控制器等优点[10 ⇓ -12 ] ,为多相电机谐波电流的抑制提供新的思路。然而,传统MPC在一个控制周期中只使用单个电压矢量,这不可避免地在谐波子空间产生谐波电压,而这部分电压作用在多相电机较小的漏抗上,会产生较大的谐波电流,进而增加定子铜耗,降低系统效率[13 ] 。为抑制谐波电流,文献[14 ]选用基波子空间最外层和次外层电压矢量,通过构造虚拟电压矢量使谐波子空间映射电压幅值为零,将虚拟电压矢量作为控制集,有效抑制了谐波电流。然而,由于控制集中电压矢量幅值固定不可调,相电流仍存在较大脉动。为解决电流脉动问题,文献[15 ]采用占空比调制策略,在一个控制周期中计算有效电压矢量的作用时间,并在其余时间内插入零电压矢量,提高了电流控制精度。此外,为了进一步抑制电流脉动,基于虚拟电压矢量,文献[16 -17 ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能。然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制。在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] 。由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升。
针对上述问题,本文提出一种能够有效抑制谐波电流的双子空间占空比模型预测电流控制(Model predictive current control,MPCC)策略。通过分别在基波子空间和谐波子空间构造虚拟电压矢量控制集,完成对不同目标的控制要求,即通过基波子空间的电压矢量实现对有功分量的调节,通过谐波子空间的电压矢量实现对谐波电流的抑制。在此基础上,应用虚拟矢量占空比调制策略进一步提升稳态电流控制精度。此外,考虑到所提算法由于增加谐波子空间控制集而带来的计算量较大问题,本文进一步提出了一种最优矢量简化寻优方案,在不显著增加计算量的同时,实现对两个子空间分量的有效控制。最后,通过试验对比了传统虚拟矢量占空比MPCC算法与本文所提算法的控制效果。
2 双三相PMSG系统建模
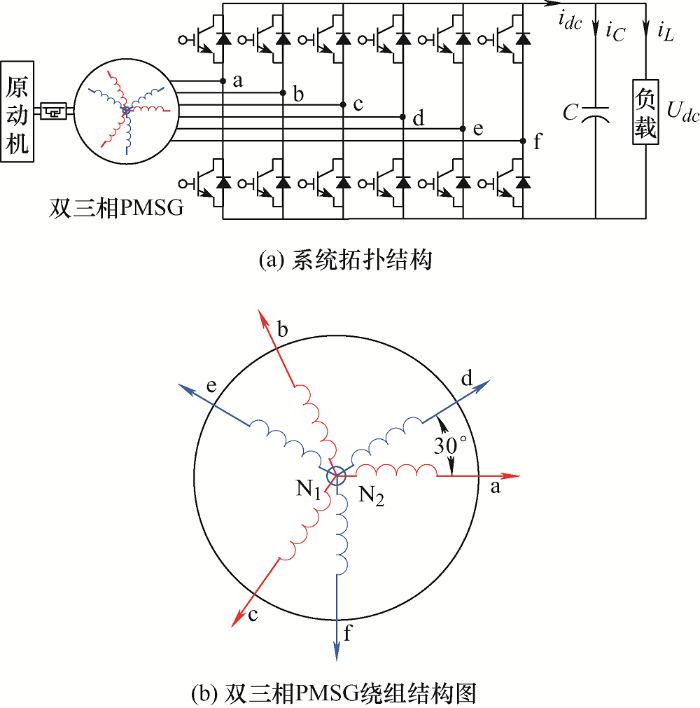
图1 为双三相PMSG整流系统的拓扑结构,电机两套绕组中性点隔离,相位上互差30°。图1 中,发电机将原动机的机械能转换为交流电输送给整流器,整流器将交流信号转换为稳定直流电压供负载使用。
图1
2.1 双三相PMSG数学模型
双三相PMSG是一个高阶、非线性、强耦合的六维系统。为了简化分析,假设定子电流和转子永磁体产生的气隙磁链都为正弦分布,忽略铁心饱和效应以及涡流、磁滞损耗。根据矢量空间解耦原理[20 ] ,将电机各变量分别映射到三个彼此正交的子空间,即α-β 基波子空间、x-y 谐波子空间和o 1 -o 2 零序子空间。其中,只有α-β 子空间分量参与机电能量转换,x-y 子空间和o 1 -o 2 子空间分量只产生谐波损耗。由于电机绕组采用中性点隔离的连接方式,o 1 -o 2 子空间各变量为零,因此无需考虑o 1 -o 2 子空间。进一步,按电动机惯例,通过Park变换得到双三相PMSG在d-q 坐标系和x-y 坐标系的电压方程
(1) $\left\{ \begin{align} & {{u}_{d}}={{L}_{d}}\frac{d{{i}_{d}}}{dt}+{{R}_{s}}{{i}_{d}}-{{\omega }_{e}}{{L}_{q}}{{i}_{q}} \\ & {{u}_{q}}={{L}_{q}}\frac{d{{i}_{q}}}{dt}+{{R}_{s}}{{i}_{q}}+{{\omega }_{e}}{{L}_{d}}{{i}_{d}}+{{\omega }_{e}}{{\psi }_{f}} \\ & {{u}_{x}}={{L}_{0}}\frac{d{{i}_{x}}}{dt}+{{R}_{s}}{{i}_{x}} \\ & {{u}_{y}}={{L}_{0}}\frac{d{{i}_{y}}}{dt}+{{R}_{s}}{{i}_{y}} \\ \end{align} \right.$
式中,ud 、uq 、ux 、uy 分别为d 、q 、x 、y 轴电压;id 、iq 、ix 、iy 分别为d 、q 、x 、y 轴电流;Rs 为定子电阻;ωe 为电角速度;Ld 、Lq 分别为d 、q 轴电感,且Ld =Lq ;L 0 为定子自漏感;Ψf 为永磁体磁链幅值。
为计算下一个采样时刻的电流预测值,采用前向欧拉近似法得到电机的离散状态方程
(2) $\left\{ \begin{align} & {{i}_{d}}(k+1)={{i}_{d}}(k)+\frac{{{T}_{s}}}{{{L}_{d}}}[{{u}_{d}}(k)-{{R}_{s}}{{i}_{d}}(k)+{{\omega }_{e}}{{L}_{q}}{{i}_{q}}(k)] \\ & {{i}_{q}}(k+1)={{i}_{q}}(k)+\frac{{{T}_{s}}}{{{L}_{q}}}[{{u}_{q}}(k)-{{R}_{s}}{{i}_{q}}(k)- \\ & \ \ \ \ \ \ {{\omega }_{e}}{{L}_{d}}{{i}_{d}}(k)-{{\omega }_{e}}{{\psi }_{f}}] \\ & {{i}_{x}}(k+1)={{i}_{x}}(k)+\frac{{{T}_{s}}}{{{L}_{0}}}[{{u}_{x}}(k)-{{R}_{s}}{{i}_{x}}(k)] \\ & {{i}_{y}}(k+1)={{i}_{y}}(k)+\frac{{{T}_{s}}}{{{L}_{0}}}[{{u}_{y}}(k)-{{R}_{s}}{{i}_{y}}(k)] \end{align} \right.$
式中,id (k +1)、iq (k +1)、ix (k +1)、iy (k +1)分别为下一个采样时刻d 、q 、x 、y 轴的电流预测值;id (k )、iq (k )、ix (k )、iy (k )分别为当前时刻d 、q 、x 、y 轴的电流采样值;Ts 为采样周期;ud (k )、uq (k )、ux (k )、uy (k )分别为当前d 、q 、x 、y 轴电压。
2.2 六相电压源型整流器
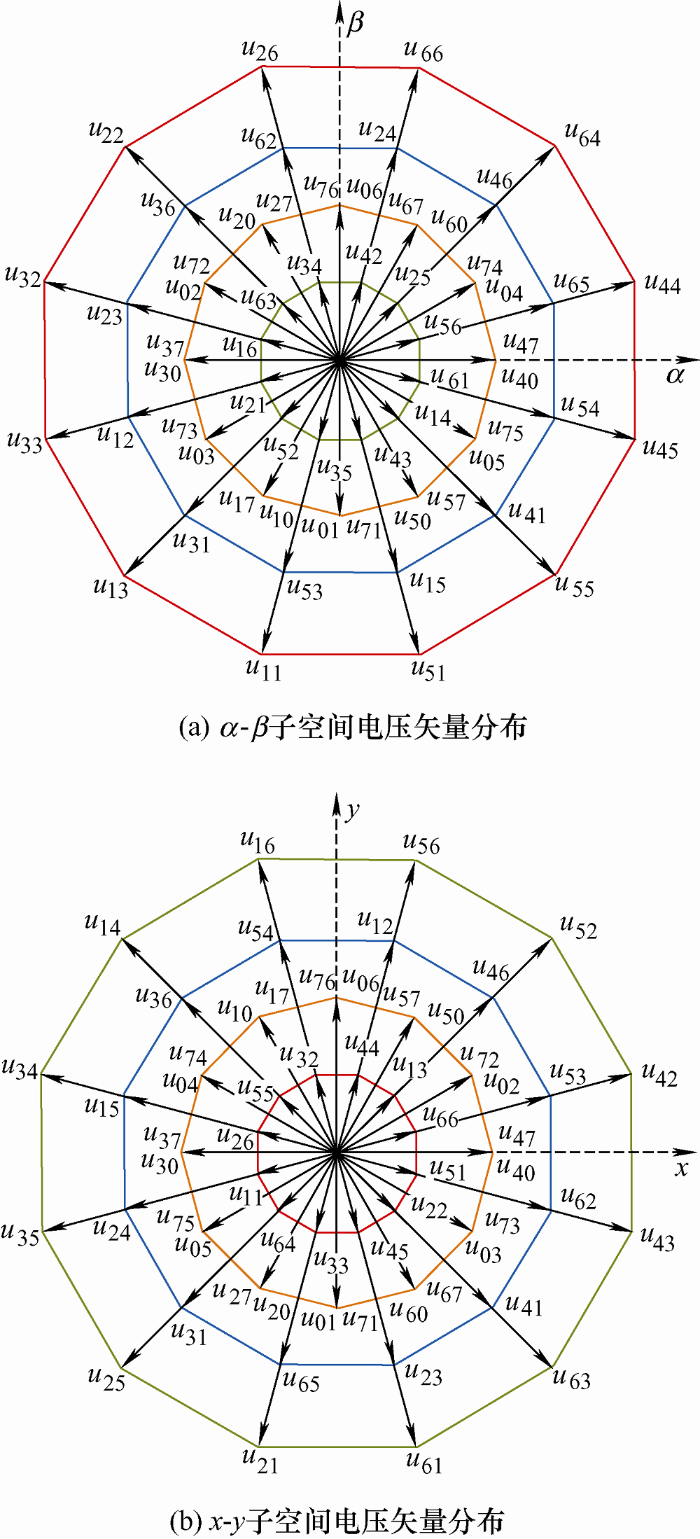
六相电压源型整流器的每相桥臂都有两种开关状态,因此整个整流器共有64个电压矢量,包括60个有效电压矢量和4个零电压矢量。双三相系统中,电压矢量在α-β 子空间和x-y 子空间中均会产生映射。图2 为双三相PMSG系统有效电压矢量在两个子空间的分布。
图2
如图2 所示,每一个电压矢量都可用一个下标为八进制数的电压矢量表示,与八进制数相对应的二进制数代表了整流器的开关状态,从高位到低位依次为S a S b S c S d S e S f 。其中Si (i =a, b, c, d, e, f)为i 相桥臂的开关状态函数,其值取“1”时表示该桥臂上管开通,取“0”时表示该桥臂下管开通。
(1) α-β 子空间中最外层和最内层的电压矢量分别映射为x-y 子空间中最内层和最外层的电压矢量;x-y 子空间中最外层和最内层的电压矢量分别映射为α-β 子空间中最内层和最外层的电压矢量;位于中间两层的电压矢量在两个子空间中具有相同的幅值。
(2) 在每一个子空间中,电压矢量都可以分为最外层、次外层、中间层和内层,电压矢量的幅值分别为0.644Udc 、0.471Udc 、0.333Udc 、0.173Udc ,其中Udc 为母线电压的幅值。
3 传统MPCC算法
在双三相PMSG整流系统中,传统MPCC算法只选取α-β 子空间中最外层的12个有效矢量和零矢量作为控制集,将控制集中各电压矢量代入式(2)表示的双三相PMSG离散模型中预测下一时刻电流值,通过最小化价值函数选取最优矢量并将该矢量对应的开关状态作用于整流器,完成一次预测控制。价值函数由式(3)给出
(3) $g={{\left| i_{d}^{*}-{{i}_{d}}(k+1) \right|}^{2}}+{{\left| i_{q}^{*}-{{i}_{q}}(k+1) \right|}^{2}}$
式中,i * d i * q d 、q 轴电流的给定值。为保证发电机最大有功功率输出,d 轴电流给定为0。
根据第2.2节分析,每个电压矢量在两个子空间均会产生映射,因此,在一个控制周期内应用单个开关状态不可避免地在x-y 子空间产生电压矢量,由式(1)可知,这部分电压矢量只作用于漏抗上,因此会产生较大的谐波电流。
分析电压矢量在两个子空间的对应关系,可以通过伏秒平衡原则构造虚拟电压矢量,即在一个控制周期内按一定比例结合α-β 子空间最外层和次外层电压矢量合成新的矢量,使该矢量在x-y 子空间映射幅值为零,达到抑制谐波电流的目的。虚拟电压矢量的构造由式(4)给出
(4) $\left\{ \begin{align} & \left| v{{v}_{\alpha \beta }} \right|{{T}_{s}}=0.644{{U}_{dc}}{{t}_{L}}+0.471{{U}_{dc}}{{t}_{SL}} \\ & \left| v{{v}_{xy}} \right|{{T}_{s}}=0.173{{U}_{dc}}{{t}_{L}}-0.471{{U}_{dc}}{{t}_{SL}} \\ & {{t}_{L}}+{{t}_{SL}}={{T}_{s}} \\ \end{align} \right.$
式中,|vvαβ |、|vvxy |分别为合成电压矢量在α-β 子空间和x-y 子空间的幅值;tL 、tSL 分别为α-β 子空间最外层和次外层电压矢量在一个控制周期内的作用时间。
(5) $\left\{ \begin{align} & \left| v{{v}_{\alpha \beta }} \right|=0.598{{U}_{dc}} \\ & {{t}_{L}}\text{ }=0.732{{T}_{s}} \\ & {{t}_{SL}}=0.268{{T}_{s}} \\ \end{align} \right.$
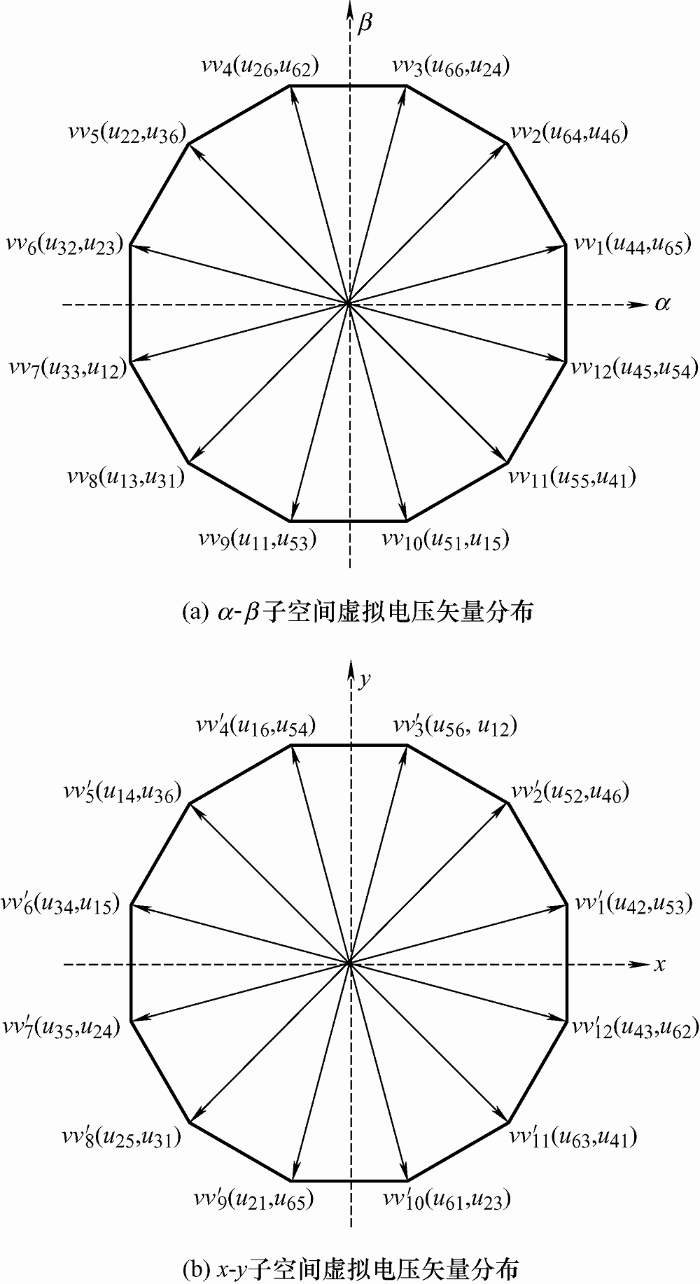
即最外层电压矢量作用时间为0.732Ts ,次外层电压矢量作用时间为0.268Ts ,合成电压矢量幅值为0.598Udc 。因此,只需保证最外层和次外层电压矢量作用时间之比为0.732∶0.268,即可保证x-y 子空间合成电压矢量幅值为零。图3 a为α-β 子空间虚拟矢量分布图。
图3
4 双子空间MPCC算法
4.1 控制集选取及价值函数设计
根据传统MPCC算法在α-β 子空间构建虚拟电压矢量,使x-y 子空间合成电压矢量为零进而抑制谐波的原理,基于同样思想,结合x-y 子空间最外层和次外层的电压矢量,构建x-y 子空间的虚拟电压矢量,该虚拟电压矢量在α-β 子空间合成电压矢量幅值为零,如图3 b所示。
将在两个子空间内构建的虚拟电压矢量作为控制集,其构建思想如下:通过α-β 子空间控制集实现对有功分量的调节,通过x-y 子空间控制集实现对谐波电流的抑制。由于两个子空间虚拟电压矢量互相映射为零,因此可以实现对两个子空间的单独控制,两个子空间的价值函数分别如下
(6) ${{g}_{dq}}={{\left| i_{d}^{*}-{{i}_{d}}(k+1) \right|}^{2}}+{{\left| i_{q}^{*}-{{i}_{q}}(k+1) \right|}^{2}}$
(7) ${{g}_{xy}}={{\left| i_{x}^{*}-{{i}_{x}}(k+1) \right|}^{2}}+{{\left| i_{y}^{*}-{{i}_{y}}(k+1) \right|}^{2}}$
与传统基于虚拟电压矢量的MPCC方法相比,本文考虑了死区时间和变流器非线性因素等引起的谐波电流,实现了对x-y 子空间分量的闭环控制。值得注意的是,由于两个子空间的控制集不同,需要对两个子空间分别寻优,因此会选出两个最优矢量分别对应于不同的子空间。
4.2 占空比优化及重组
引入虚拟电压矢量虽然可以有效抑制谐波电流,但由于其幅值固定不可调,稳态时电流仍存在较大的脉动。为解决上述问题,本文采用占空比调制策略,使最优矢量在控制周期内作用部分时间,其余时间作用零矢量,从而达到最优矢量幅值可调的目的。
本文采用电流无差拍方法计算作用时间,在一个控制周期内,分配有效矢量和零矢量作用时间使k +1时刻的电流达到电流参考值,即
(8) ${{i}_{d}}(k+1)={{i}_{d}}(k)+{{s}_{d}}{{t}_{opt1}}+{{s}_{d0}}({{T}_{s}}-{{t}_{opt1}})=i_{d}^{*}$
(9) ${{i}_{q}}(k+1)={{i}_{q}}(k)+{{s}_{q}}{{t}_{opt1}}+{{s}_{q0}}({{T}_{s}}-{{t}_{opt1}})=i_{q}^{*}$
(10) ${{i}_{x}}(k+1)={{i}_{x}}(k)+{{s}_{x}}{{t}_{opt2}}+{{s}_{x0}}({{T}_{s}}-{{t}_{opt2}})=i_{x}^{*}$
(11) ${{i}_{y}}(k+1)={{i}_{y}}(k)+{{s}_{y}}{{t}_{opt2}}+{{s}_{y0}}({{T}_{s}}-{{t}_{opt2}})=i_{y}^{*}$
式中,topt 1 和topt 2 分别为α-β 子空间和x-y 子空间对应最优电压矢量的作用时间;sd 、sq 、sx 、sy 分别为两个子空间中最优电压矢量作用时id 、iq 、ix 、iy 的斜率;sd 0 、sq 0 、sx 0 、sy 0 分别为零矢量作用时id 、iq 、ix 、iy 的斜率。由式(1)可得各电流斜率的计算公式为
(12) $\left\{ \begin{align} & {{s}_{d0}}={{\left. \frac{d{{i}_{d}}}{dt} \right|}_{{{u}_{d}}(k)=0}}=\frac{1}{{{L}_{\text{d}}}}(-{{R}_{s}}{{i}_{d}}+{{\omega }_{e}}{{L}_{q}}{{i}_{q}}) \\ & {{s}_{q0}}={{\left. \frac{d{{i}_{q}}}{dt} \right|}_{{{u}_{q}}(k)=0}}=\frac{1}{{{L}_{q}}}(-{{R}_{s}}{{i}_{q}}+{{\omega }_{e}}{{L}_{d}}{{i}_{d}}-{{\omega }_{e}}{{\psi }_{f}}) \\ & {{s}_{x0}}={{\left. \frac{d{{i}_{x}}}{dt} \right|}_{{{u}_{x}}(k)=0}}=\frac{1}{{{L}_{0}}}(-{{R}_{s}}{{i}_{x}}) \\ & {{s}_{y0}}={{\left. \frac{d{{i}_{y}}}{dt} \right|}_{{{u}_{y}}(k)=0}}=\frac{1}{{{L}_{0}}}(-{{R}_{s}}{{i}_{y}}) \\ \end{align} \right.$
(13) $\left\{ \begin{align} & {{s}_{d}}={{\left. \frac{d{{i}_{d}}}{dt} \right|}_{{{u}_{d}}(k)=v{{v}_{d}}}}={{s}_{d0}}+\frac{v{{v}_{d}}}{{{L}_{d}}} \\ & {{s}_{q}}={{\left. \frac{d{{i}_{q}}}{dt} \right|}_{{{u}_{q}}(k)=v{{v}_{q}}}}={{s}_{q0}}+\frac{v{{v}_{q}}}{{{L}_{q}}} \\ & {{s}_{x}}={{\left. \frac{d{{i}_{x}}}{dt} \right|}_{{{u}_{x}}(k)=v{{v}_{x}}}}={{s}_{x0}}+\frac{v{{v}_{x}}}{{{L}_{0}}} \\ & {{s}_{y}}={{\left. \frac{d{{i}_{y}}}{dt} \right|}_{{{u}_{y}}(k)=v{{v}_{y}}}}={{s}_{y0}}+\frac{v{{v}_{y}}}{{{L}_{0}}} \\ \end{align} \right.$
式中,vvd 、vvq 分别为α-β 子空间最优电压矢量的d 、q 轴分量;vvx 、vvy 分别为x-y 子空间最优电压矢量的x 、y 轴分量。
将式(8)、(9)代入式(6),可得到价值函数关于最优矢量作用时间的函数,通过式(14)最小化价值函数,求得α-β 子空间最优矢量的作用时间,由式(15)给出
(14) $\frac{\partial {{g}_{dq}}}{\partial {{t}_{opt1}}}=0$
(15) $\begin{align} & {{t}_{opt1}}=\frac{[i_{d}^{*}-{{i}_{d}}(k)-{{s}_{d0}}{{T}_{s}}]\times ({{s}_{d}}-{{s}_{d0}})}{{{\left( {{s}_{d}}-{{s}_{d0}} \right)}^{2}}+{{\left( {{s}_{q}}-{{s}_{q0}} \right)}^{2}}}+ \\ & \text{ }\frac{[i_{q}^{*}-{{i}_{q}}(k)-{{s}_{q0}}{{T}_{s}}]\times ({{s}_{q}}-{{s}_{q0}})}{{{\left( {{s}_{d}}-{{s}_{d0}} \right)}^{2}}+{{\left( {{s}_{q}}-{{s}_{q0}} \right)}^{2}}} \\ \end{align}$
同理,将式(10)、(11)代入式(7),可得如式(17)所示的x-y 子空间最优矢量作用时间。
(16) $\frac{\partial {{g}_{xy}}}{\partial {{t}_{opt2}}}=0$
(17) $\begin{align} & {{t}_{opt2}}=\frac{[i_{x}^{*}-{{i}_{x}}(k)-{{s}_{x0}}{{T}_{s}}]\times ({{s}_{x}}-{{s}_{x0}})}{{{\left( {{s}_{x}}-{{s}_{x0}} \right)}^{2}}+{{\left( {{s}_{y}}-{{s}_{y0}} \right)}^{2}}}+ \\ & \text{ }\frac{[i_{y}^{*}-{{i}_{y}}(k)-{{s}_{y0}}{{T}_{s}}]\times ({{s}_{y}}-{{s}_{y0}})}{{{\left( {{s}_{x}}-{{s}_{x0}} \right)}^{2}}+{{\left( {{s}_{y}}-{{s}_{y0}} \right)}^{2}}} \\ \end{align}$
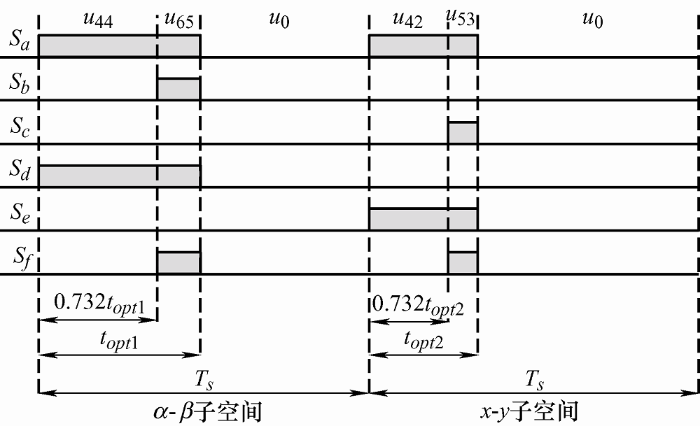
假设vv 1 、$v{{{v}'}_{1}}$ α-β 子空间和x-y 子空间选择的最优电压矢量,topt 1 和topt 2 为两个电压矢量对应的作用时间。为了实现对两个子空间的控制,可以按图4 所示对两个子空间隔周期更换调制,然而在一个控制周期内只合成一个电压矢量,对另一个子空间施加的电压矢量为零,会使得变流器等效输出电压矢量幅值减半,不能达到期望的控制效果。
图4
根据第2.1节对控制集的分析,两个子空间的虚拟电压矢量在两个子空间之间互相映射为零电压矢量。因此对单个子空间控制时的零电压矢量可以等效替换为另一个子空间的有效电压矢量,进而将对两个子空间的控制合并到一个控制周期,实现对两个子空间分量的同时控制。
值得注意的是,单个控制周期内有效矢量的作用时间介于0~Ts ,上述方法存在两个有效矢量作用时间之和大于Ts 的情况。为首先保证系统对有功分量的控制,对两个子空间内有效矢量的作用时间施加约束条件,α-β 子空间和x-y 子空间最优矢量作用时间约束由式(18)、(19)给出。
(18) $\left\{ \begin{align} & {{t}_{opt1}}=0\ \text{ }{{t}_{opt1}}<0 \\ & {{t}_{opt1}}={{t}_{opt1}}\ \text{ 0}<{{t}_{opt1}}<{{T}_{s}} \\ & {{t}_{opt1}}={{T}_{s}}\ \text{ }{{t}_{opt1}}>{{T}_{s}} \\ \end{align} \right.$
(19) $\left\{ \begin{align} & {{t}_{opt2}}=0\ \ \text{ }{{t}_{opt2}}<0 \\ & {{t}_{opt2}}={{t}_{opt2}}\ \ \text{ 0}<{{t}_{opt2}}<1-{{t}_{opt1}} \\ & {{t}_{opt2}}=1-{{t}_{opt1}}\ \ \ \text{ }{{t}_{opt2}}>1-{{t}_{opt1}} \\ \end{align} \right.$
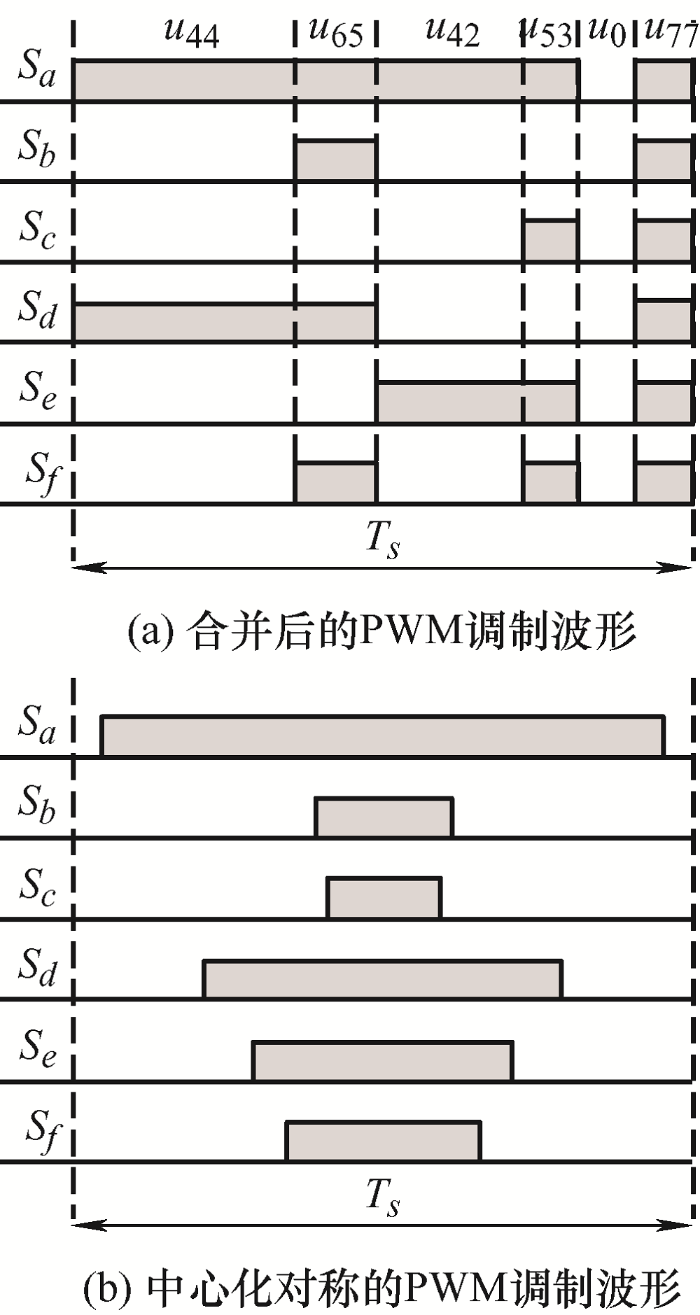
图5 a为合并后单个控制周期内的PWM波形。由图5 a可知,电压矢量个数的增加将导致单个控制周期内每相桥臂的开关管动作多次,系统损耗增加且不易于控制算法的实现[21 ] 。此外,变化的开关频率会导致电压频谱的扩展,不利于对开关频率处的电磁干扰进行集中滤波处理[22 ] 。根据脉宽调制等效输出的原理,只要保证各桥臂开关作用时间相等,就可以输出相同的电压幅值,调整后的各桥臂开关信号如图5 b所示。
图5
4.3 简化寻优
传统的基于虚拟矢量占空比的MPCC将基波子空间12个虚拟电压矢量作为控制集,通过价值函数遍历寻优得到最优矢量后计算占空比。因此,在一个控制周期中只需遍历计算预测模型12次。而本文提出的方法增加了x-y 子空间的控制集,寻优次数和计算量增加一倍。
针对上述计算量偏大的问题,本文提出一种简化寻优策略,如图3 所示。通过α-β 、x-y 坐标轴分别将两个子空间的电压矢量分布划分为四个扇区。以α-β 子空间为例,首先将电压矢量vv 2 、vv 5 、vv 8 、vv 11 代入预测模型和价值函数进行寻优,选择出使价值函数最小的电压矢量,确定最优矢量所在的扇区。之后计算该扇区其余两个电压矢量的价值函数并和第一步选出电压矢量的价值函数比较,确定最优电压矢量。这种策略只需遍历计算预测模型6次便可确定单个子空间内的最优电压矢量,因此可以使寻优过程中的计算量减半。表1 列出两个子空间的电压矢量寻优次序。
4.4 所提算法的实现
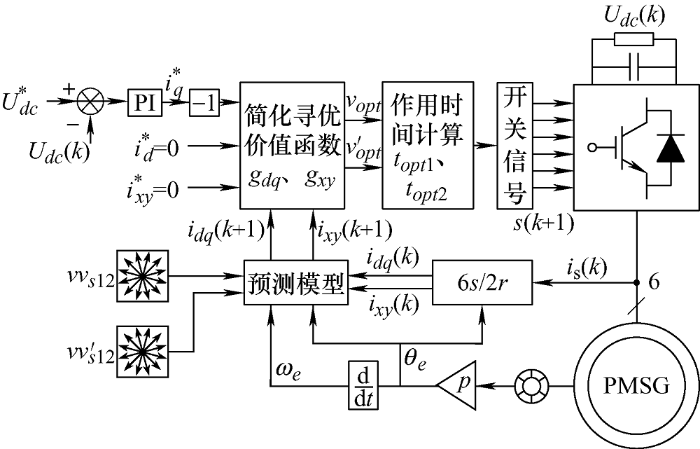
根据上述分析可得如图6 所示的双子空间虚拟矢量占空比MPCC的系统框图,其算法实现主要包括以下几个步骤。
步骤1:采样当前电流并对其进行坐标变换。构建α-β 子空间和x-y 子空间虚拟电压矢量控制集。
步骤2:根据式(2)构建的预测模型计算控制集中各电压矢量对应的下一时刻电流预测值。
步骤3:结合简化寻优策略,通过最小化价值函数选出对应于两个子空间的两个最优电压矢量。
步骤4:根据电流无差拍的原则计算两个最优电压矢量作用时间。
步骤5:根据步骤3和4的结果,将两个子空间的控制合并到一个控制周期,重组开关序列并作用于整流器。
图6
5 仿真与试验验证
基于上述控制策略,以双三相PMSG为被控对象,仿真验证所提控制算法的有效性。并且,在双三相发电平台上对本策略进行试验验证。仿真与试验参数由表2 给出。
仿真与试验中的电机均运行在额定转速,给定母线电压80 V。在电压外环PI参数相同的情况下,对比所提双子空间虚拟矢量占空比MPCC方法与传统基于虚拟矢量占空比MPCC的控制效果。此外,为了与实际系统接近,在仿真环境中给整流器设置了2 μs的死区时间。
5.1 仿真分析
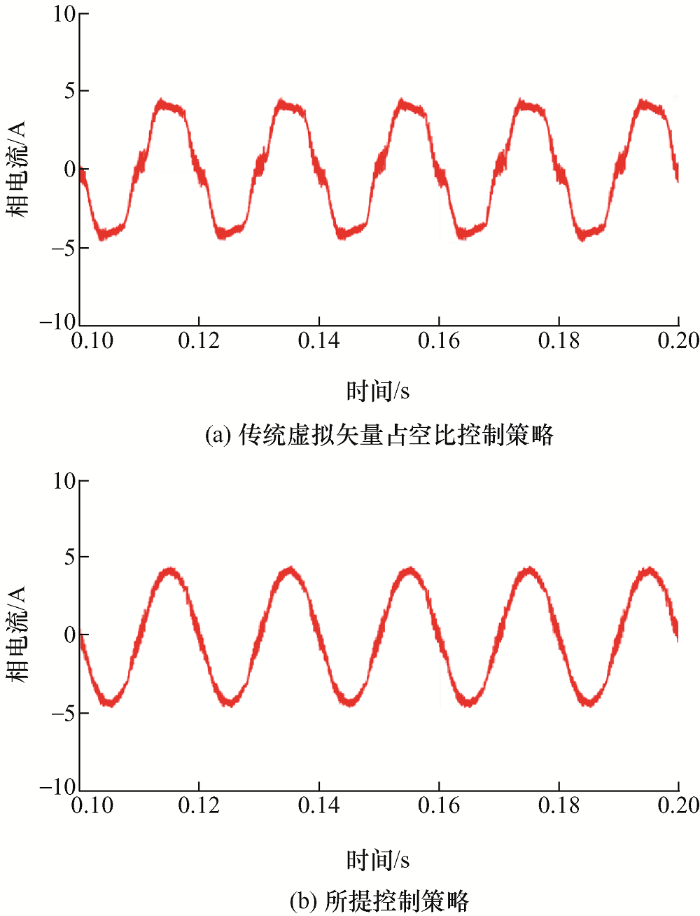
图7 给出了负载电阻为20 Ω情况下两种算法稳态时的相电流仿真波形。如图7 所示,传统虚拟矢量占空比MPCC算法定子电流畸变严重,谐波电流较大,采用本文所提控制算法后的定子电流正弦度明显得到提升,谐波电流得到了明显抑制,验证了本文所提控制策略的有效性。
图7
5.2 试验验证
本文所搭建的双三相PMSG试验平台如图8 所示。整流器采用TI公司的TMS320F28377作为主控芯片,使用CPLD进行硬件逻辑保护,采用分立的IGBT器件搭建六相整流器。试验平台以三相永磁同步电动机作为原动机拖动双三相PMSG发电。
图8
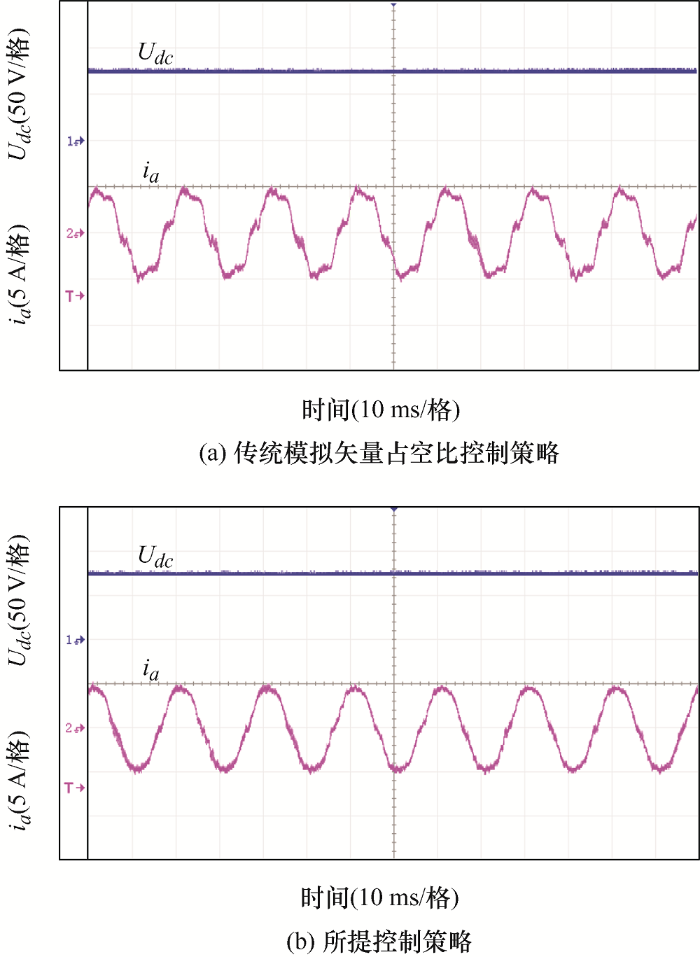
图9 给出了负载电阻为20 Ω情况下两种算法的稳态试验波形。由图9 可知,两种控制策略的直流母线电压均可以准确跟踪给定值。但是,传统虚拟矢量占空比MPCC算法定子电流畸变严重,而本文所提控制算法的定子电流正弦度明显得到提升。试验结果与仿真一致。
图9
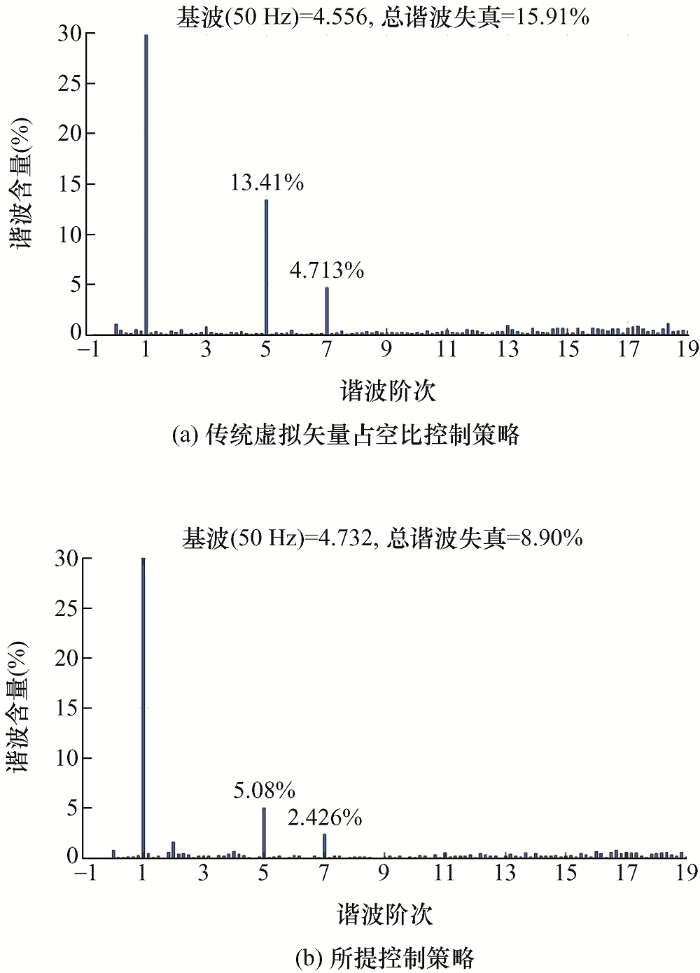
图10 为两种算法定子电流的谐波分析,传统虚拟矢量占空比MPCC算法定子电流THD为15.91%,其中5、7次谐波含量分别为13.41%、4.713%;本文所提算法定子电流谐波含量明显减少,THD为8.90%,5、7次谐波分量分别为5.08%、2.426%。可以看出,本文所提控制策略的谐波抑制性能明显优于传统虚拟矢量占空比MPCC控制策略,验证了本文所提控制策略的优越性。
图10
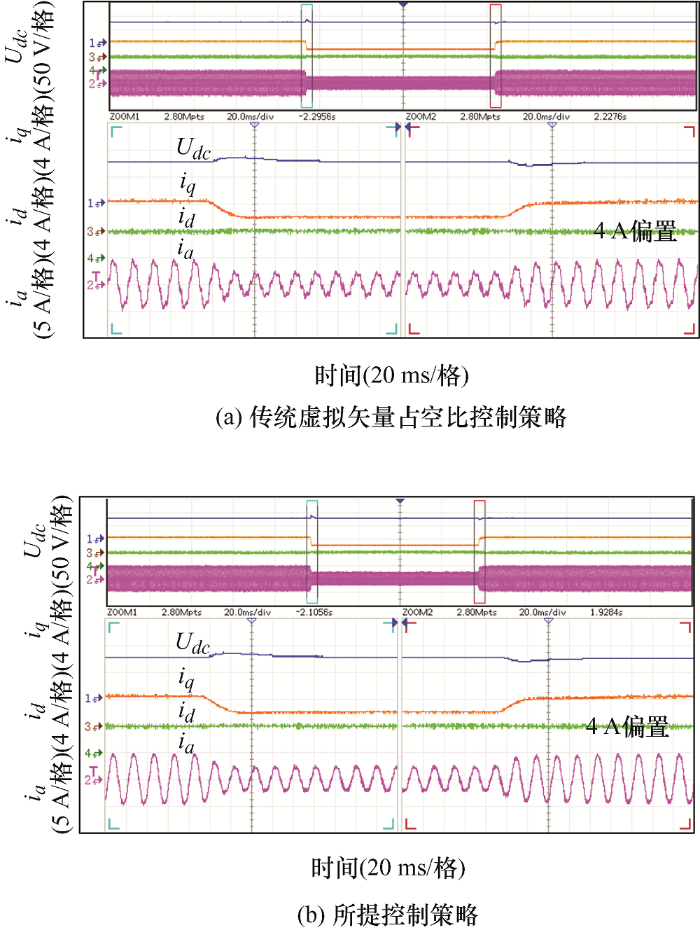
图11 给出了两种算法切换负载时的动态试验波形。通过调节直流母线侧的负载电阻由20 Ω到40 Ω再到20 Ω实现减载和加载的过程。由图11 可知,两种控制策略均可实现快速的动态响应,但本文所提控制策略能够实现更好的稳态性能。
图11
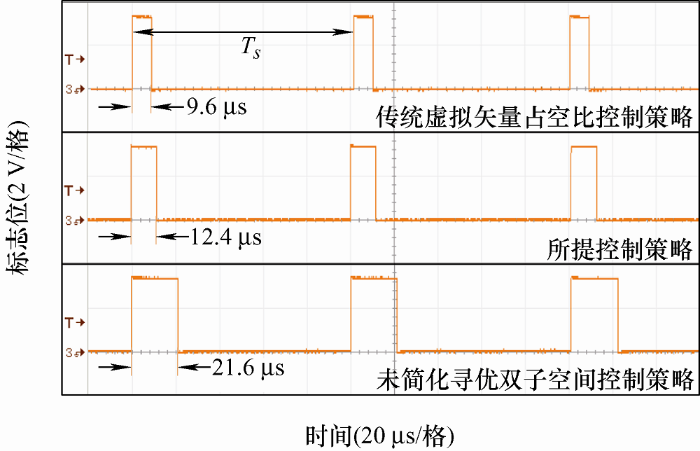
图12 给出了两种控制策略的算法执行时间对比,并同时给出了未简化寻优双子空间控制策略的算法执行时间。本文所提控制策略增加了x-y 子空间控制集,因此,当没有采用简化寻优策略时,寻优过程中的计算量相当于增加了一倍,如图12 所示,算法需要21.6 μs完成两个子空间最优电压矢量的选取和占空比计算的工作。当采用简化寻优策略时,算法部分只需要12.4 μs即可完成寻优工作。与传统虚拟矢量占空比MPCC策略相比,本文所提控制策略在算法计算时间上虽然稍有增加,但实现了更好的谐波电流抑制效果。
图12
6 结论
(1) 针对多相电机现有MPCC谐波电流偏大的问题,本文提出了一种双三相PMSG双子空间占空比MPCC策略。在传统的基于虚拟电压矢量的MPCC算法上,扩展了x-y 子空间电压矢量控制集,实现了对x-y 子空间分量的闭环控制。
(2) 对于所提算法因扩展控制集而带来的计算量问题,本文进一步提出了一种控制集简化寻优的策略,降低基于枚举寻优的迭代次数,使之以较少的计算量同时完成对有功分量的控制和对谐波电流的抑制。
(3) 试验结果表明,所提算法能够在不显著增加计算量的情况下实现对谐波电流的有效抑制,提升双三相PMSG整流系统效率。
参考文献
View Option
[1]
BARRERO F DURAN M J . Recent advances in the design,modeling,and control of multiphase machines—Part I
[J]. IEEE Transactions on Industrial Electronics , 2016 , 63 (1 ):449 -458 .
DOI:10.1109/TIE.2015.2447733
URL
[本文引用: 1]
[2]
YE D LI J CHEN J , et al . Study on steady-state errors for asymmetrical six-phase permanent magnet synchronous machine fault-tolerant predictive current control
[J]. IEEE Transactions on Power Electronics , 2020 , 35 (1 ):640 -651 .
DOI:10.1109/TPEL.2019.2912300
URL
[本文引用: 1]
[3]
GAO J DAI L ZHANG W , et al . Multi-Interval efficiency design optimization for permanent magnet synchronous generators used in hybrid electric special vehicles
[J]. IEEE Transactions on Industrial Electronics , 2021 , 68 (6 ):4646 -4656 .
DOI:10.1109/TIE.2020.2988222
URL
[本文引用: 1]
[4]
田代宗 , 孙宇光 , 王善铭 , 等 . 多相整流永磁同步发电机绕组内部相间短路的故障分析
[J]. 电工技术学报 , 2020 , 35 (6 ):1262 -1271 .
[本文引用: 1]
TIAN Daizong SUN Yuguang WANG Shanming , et al . Analysis of stator internal phase-to-phase short-circuit in the multiphase permanent magnet synchronous generator with rectifier load system
[J]. Transactions of China Electrotechnical Society , 2020 , 35 (6 ):1262 -1271 .
[本文引用: 1]
[5]
WANG X ZHENG W XU Z . A hybrid direct torque control scheme for dual three-phase PMSM drives with improved operation performance
[J]. IEEE Transactions on Power Electronics , 2019 , 34 (2 ):1622 -1634 .
DOI:10.1109/TPEL.2018.2835454
URL
[本文引用: 1]
[6]
CHE H S LEVI E JONES M , et al . Current control methods for an asymmetrical six-phase induction motor drive
[J]. IEEE Transactions on Power Electronics , 2014 , 29 (1 ):407 -417 .
DOI:10.1109/TPEL.2013.2248170
URL
[本文引用: 1]
[7]
张建亚 , 王凯 , 朱姝姝 , 等 . 双三相永磁同步电机多谐波电流协同控制策略
[J]. 中国电机工程学报 , 2020 , 40 (2 ):644 -652 .
[本文引用: 1]
ZHANG Jianya WANG Kai ZHU Shushu , et al . Control strategies of dual three-phase permanent magnet machines with multi-harmonics
[J]. Proceedings of the CSEE , 2020 , 40 (2 ):644 -652 .
[本文引用: 1]
[8]
孙国栋 , 苏健勇 , 杨贵杰 . 基于双频矢量调制的五相永磁同步电机四维电流控制方法
[J]. 中国电机工程学报 , 2019 , 39 (10 ):3085 -3098 .
[本文引用: 1]
SUN Guodong SU Jianyong YANG Guijie . Four dimensional current control method of five-phase PMSM based on double frequency vector modulation
[J]. Proceedings of the CSEE , 2019 , 39 (10 ):3085 -3098 .
[本文引用: 1]
[9]
FENG G LAI C LI W , et al . Dual reference frame based current harmonic minimization for dual three-phase PMSM considering inverter voltage limit
[J]. IEEE Transactions on Power Electronics , 2021 , 36 (7 ):8055 -8066 .
DOI:10.1109/TPEL.2020.3041749
URL
[本文引用: 1]
[10]
LUO Y LIU C . A simplified model predictive control for a dual three-phase PMSM motor with reduced harmonic currents
[J]. IEEE Transactions on Industrial Electronics , 2018 , 65 (11 ):9079 -9089 .
DOI:10.1109/TIE.2018.2814013
URL
[本文引用: 1]
[11]
LUO Y LIU C . Elimination of harmonic currents using a reference voltage vector based-model predictive control for a six-phase PMSM motor
[J]. IEEE Transactions on Power Electronics , 2019 , 34 (7 ):6960 -6972 .
DOI:10.1109/TPEL.2018.2874893
URL
[本文引用: 1]
[12]
ZHAO W TAO T ZHU J , et al . A novel finite-control-set model predictive current control for five-phase PM motor with continued modulation
[J]. IEEE Transactions on Power Electronics , 2020 , 35 (7 ):7261 -7270 .
DOI:10.1109/TPEL.2019.2954285
URL
[本文引用: 1]
[13]
BARRERO F ARAHAL M R GREGOR R , et al . A proof of concept study of predictive current control for VSI-driven asymmetrical dual three-phase AC machines
[J]. IEEE Transactions on Industrial Electronics , 2009 , 56 (6 ):1937 -1954 .
DOI:10.1109/TIE.2008.2011604
URL
[本文引用: 1]
[14]
PRIETO I G DURAN M J ACIEGO J J , et al . Model predictive control of six-phase induction motor drives using virtual voltage vectors
[J]. IEEE Transactions on Industrial Electronics , 2018 , 65 (1 ):27 -37 .
DOI:10.1109/TIE.2017.2714126
URL
[本文引用: 2]
[15]
XUE C SONG W WU X , et al . A constant switching frequency finite-control-set predictive current control scheme of five-phase inverter with duty-ratio optimization
[J]. IEEE Transactions on Power Electronics , 2018 , 33 (4 ):3583 -3594 .
DOI:10.1109/TPEL.2017.2707440
URL
[本文引用: 2]
[16]
ZHANG Y HUANG L XU D , et al . Performance evaluation of two-vector-based model predictive current control of PMSM drives
[J]. Chinese Journal of Electrical Engineering , 2018 , 4 (2 ):65 -81 .
[本文引用: 2]
Conventional model predictive current control (MPCC) applies only one vector during one control period, which produces large torque and flux ripples and high current harmonics in permanent magnet synchronous motor (PMSM) drives. Recently MPCC with duty cycle control has been proposed to improve the steady state performance by applying one non-zero vector and one null vector during one control period. However, the prior method requires lots of calculations and predictions to find the optimal voltage vectors and calculate their respective duration. Different from prior enumeration-based MPCC, this paper proposes an efficient two-vector MPCC by applying two arbitrary voltage vectors during one control period. The reference voltage vector is firstly calculated based on the principle of deadbeat current control. Two optimal vectors and their duration are then obtained in a very efficient way, which does not require the calculation of current slopes in prior MPCC methods. The proposed method is compared to the state-of-the-art predictive control methods, including conventional MPCC, MPCC with duty cycle control, deadbeat control with space vector modulation (SVM) and modulated model predictive control (M2PC). Both simulation and experimental results prove that the proposed method achieves better steady state performance than conventional MPCC with or without duty cycle and the dynamic response is not degraded. Under the condition of insufficient dc bus voltage, the proposed method outperforms deadbeat control and M2PC by presenting even higher speed range and less torque ripples.
[17]
ACIEGO J J PRIETO I G DURAN M J . Model predictive control of six-phase induction motor drives using two virtual voltage vectors
[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics , 2019 , 7 (1 ):321 -330 .
DOI:10.1109/JESTPE.2018.2883359
URL
[本文引用: 2]
[18]
薛诚 , 宋文胜 , 冯晓云 . 双重d-q 空间下五相电压源逆变器空间矢量脉宽调制死区效应分析与补偿
[J]. 中国电机工程学报 , 2017 , 37 (9 ):2667 -2676 .
[本文引用: 1]
XUE Cheng SONG Wensheng FENG Xiaoyun . Analysis and compensation of dead-time effects in five-phase voltage source inverters with space vector PWM techniques based on dual d-q space concept
[J]. Proceedings of the CSEE , 2017 , 37 (9 ):2667 -2676 .
[本文引用: 1]
[19]
李帅 , 孙立志 , 刘兴亚 , 等 . 永磁同步电机电流谐波抑制策略
[J]. 电工技术学报 , 2019 , 34 (S1 ):87 -96 .
[本文引用: 1]
LI Shuai SUN Lizhi LIU Xingya , et al . Current harmonics suppression strategies of permanent magnet synchronous motor
[J]. Transactions of China Electrotechnical Society , 2019 , 34 (S1 ):87 -96 .
[本文引用: 1]
[20]
ZHAO Y LIPO T A . Space vector PWM control of dual three-phase induction machine using vector space decomposition
[J]. IEEE Transactions on Industry Applications , 1995 , 31 (5 ):1100 -1109 .
DOI:10.1109/28.464525
URL
[本文引用: 1]
[21]
周长攀 , 苏健勇 , 杨桂杰 . 双三相永磁同步电机直接转矩控制谐波电流抑制研究
[J]. 电机与控制学报 , 2015 , 19 (9 ):46 -53 .
[本文引用: 1]
ZHOU Changpan SU Jianyong YANG Guijie . Harmonic currents suppression in direct torque control of dual three-phase permanent magnet synchronous motor
[J]. Electric Machines and Control , 2015 , 19 (9 ):46 -53 .
[本文引用: 1]
[22]
LUO Y LIU C . Multi-vector-based model predictive torque control for a six-phase PMSM motor with fixed switching frequency
[J]. IEEE Transactions on Energy Conversion , 2019 , 34 (3 ):1369 -1379 .
DOI:10.1109/TEC.2019.2917616
URL
[本文引用: 1]
Recent advances in the design,modeling,and control of multiphase machines—Part I
1
2016
... 随着国防特种装备如军舰舰船、电动飞机及多功能战车的全电化发展,以发电机为核心的直流电源系统受到广泛关注.受可靠性、装备空间以及低压大功率的限制,多相永磁同步发电机(Permanent magnet synchronous generator,PMSG)成为首要选择[1 ⇓ ⇓ -4 ] .其中,双三相PMSG因具有较小的转矩和电流脉动,具有很好的应用前景[5 ] . ...
Study on steady-state errors for asymmetrical six-phase permanent magnet synchronous machine fault-tolerant predictive current control
1
2020
... 随着国防特种装备如军舰舰船、电动飞机及多功能战车的全电化发展,以发电机为核心的直流电源系统受到广泛关注.受可靠性、装备空间以及低压大功率的限制,多相永磁同步发电机(Permanent magnet synchronous generator,PMSG)成为首要选择[1 ⇓ ⇓ -4 ] .其中,双三相PMSG因具有较小的转矩和电流脉动,具有很好的应用前景[5 ] . ...
Multi-Interval efficiency design optimization for permanent magnet synchronous generators used in hybrid electric special vehicles
1
2021
... 随着国防特种装备如军舰舰船、电动飞机及多功能战车的全电化发展,以发电机为核心的直流电源系统受到广泛关注.受可靠性、装备空间以及低压大功率的限制,多相永磁同步发电机(Permanent magnet synchronous generator,PMSG)成为首要选择[1 ⇓ ⇓ -4 ] .其中,双三相PMSG因具有较小的转矩和电流脉动,具有很好的应用前景[5 ] . ...
多相整流永磁同步发电机绕组内部相间短路的故障分析
1
2020
... 随着国防特种装备如军舰舰船、电动飞机及多功能战车的全电化发展,以发电机为核心的直流电源系统受到广泛关注.受可靠性、装备空间以及低压大功率的限制,多相永磁同步发电机(Permanent magnet synchronous generator,PMSG)成为首要选择[1 ⇓ ⇓ -4 ] .其中,双三相PMSG因具有较小的转矩和电流脉动,具有很好的应用前景[5 ] . ...
Analysis of stator internal phase-to-phase short-circuit in the multiphase permanent magnet synchronous generator with rectifier load system
1
2020
... 随着国防特种装备如军舰舰船、电动飞机及多功能战车的全电化发展,以发电机为核心的直流电源系统受到广泛关注.受可靠性、装备空间以及低压大功率的限制,多相永磁同步发电机(Permanent magnet synchronous generator,PMSG)成为首要选择[1 ⇓ ⇓ -4 ] .其中,双三相PMSG因具有较小的转矩和电流脉动,具有很好的应用前景[5 ] . ...
A hybrid direct torque control scheme for dual three-phase PMSM drives with improved operation performance
1
2019
... 随着国防特种装备如军舰舰船、电动飞机及多功能战车的全电化发展,以发电机为核心的直流电源系统受到广泛关注.受可靠性、装备空间以及低压大功率的限制,多相永磁同步发电机(Permanent magnet synchronous generator,PMSG)成为首要选择[1 ⇓ ⇓ -4 ] .其中,双三相PMSG因具有较小的转矩和电流脉动,具有很好的应用前景[5 ] . ...
Current control methods for an asymmetrical six-phase induction motor drive
1
2014
... 与三相电机不同,多相电机由于相数的增加,导致电机系统存在多个谐波子空间,在增加了控制自由度的同时也加大了控制难度.当采用传统矢量控制时,通常需要多个比例积分或比例谐振控制器对每个谐波平面进行控制[6 ⇓ ⇓ -9 ] ,控制系统复杂且参数整定困难,不易于系统的实现.近年来,模型预测控制(Model predictive control,MPC)因其原理简单、响应迅速、无需内环电流控制器等优点[10 ⇓ -12 ] ,为多相电机谐波电流的抑制提供新的思路.然而,传统MPC在一个控制周期中只使用单个电压矢量,这不可避免地在谐波子空间产生谐波电压,而这部分电压作用在多相电机较小的漏抗上,会产生较大的谐波电流,进而增加定子铜耗,降低系统效率[13 ] .为抑制谐波电流,文献[14 ]选用基波子空间最外层和次外层电压矢量,通过构造虚拟电压矢量使谐波子空间映射电压幅值为零,将虚拟电压矢量作为控制集,有效抑制了谐波电流.然而,由于控制集中电压矢量幅值固定不可调,相电流仍存在较大脉动.为解决电流脉动问题,文献[15 ]采用占空比调制策略,在一个控制周期中计算有效电压矢量的作用时间,并在其余时间内插入零电压矢量,提高了电流控制精度.此外,为了进一步抑制电流脉动,基于虚拟电压矢量,文献[16 -17 ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能.然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
双三相永磁同步电机多谐波电流协同控制策略
1
2020
... 与三相电机不同,多相电机由于相数的增加,导致电机系统存在多个谐波子空间,在增加了控制自由度的同时也加大了控制难度.当采用传统矢量控制时,通常需要多个比例积分或比例谐振控制器对每个谐波平面进行控制[6 ⇓ ⇓ -9 ] ,控制系统复杂且参数整定困难,不易于系统的实现.近年来,模型预测控制(Model predictive control,MPC)因其原理简单、响应迅速、无需内环电流控制器等优点[10 ⇓ -12 ] ,为多相电机谐波电流的抑制提供新的思路.然而,传统MPC在一个控制周期中只使用单个电压矢量,这不可避免地在谐波子空间产生谐波电压,而这部分电压作用在多相电机较小的漏抗上,会产生较大的谐波电流,进而增加定子铜耗,降低系统效率[13 ] .为抑制谐波电流,文献[14 ]选用基波子空间最外层和次外层电压矢量,通过构造虚拟电压矢量使谐波子空间映射电压幅值为零,将虚拟电压矢量作为控制集,有效抑制了谐波电流.然而,由于控制集中电压矢量幅值固定不可调,相电流仍存在较大脉动.为解决电流脉动问题,文献[15 ]采用占空比调制策略,在一个控制周期中计算有效电压矢量的作用时间,并在其余时间内插入零电压矢量,提高了电流控制精度.此外,为了进一步抑制电流脉动,基于虚拟电压矢量,文献[16 -17 ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能.然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
Control strategies of dual three-phase permanent magnet machines with multi-harmonics
1
2020
... 与三相电机不同,多相电机由于相数的增加,导致电机系统存在多个谐波子空间,在增加了控制自由度的同时也加大了控制难度.当采用传统矢量控制时,通常需要多个比例积分或比例谐振控制器对每个谐波平面进行控制[6 ⇓ ⇓ -9 ] ,控制系统复杂且参数整定困难,不易于系统的实现.近年来,模型预测控制(Model predictive control,MPC)因其原理简单、响应迅速、无需内环电流控制器等优点[10 ⇓ -12 ] ,为多相电机谐波电流的抑制提供新的思路.然而,传统MPC在一个控制周期中只使用单个电压矢量,这不可避免地在谐波子空间产生谐波电压,而这部分电压作用在多相电机较小的漏抗上,会产生较大的谐波电流,进而增加定子铜耗,降低系统效率[13 ] .为抑制谐波电流,文献[14 ]选用基波子空间最外层和次外层电压矢量,通过构造虚拟电压矢量使谐波子空间映射电压幅值为零,将虚拟电压矢量作为控制集,有效抑制了谐波电流.然而,由于控制集中电压矢量幅值固定不可调,相电流仍存在较大脉动.为解决电流脉动问题,文献[15 ]采用占空比调制策略,在一个控制周期中计算有效电压矢量的作用时间,并在其余时间内插入零电压矢量,提高了电流控制精度.此外,为了进一步抑制电流脉动,基于虚拟电压矢量,文献[16 -17 ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能.然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
基于双频矢量调制的五相永磁同步电机四维电流控制方法
1
2019
... 与三相电机不同,多相电机由于相数的增加,导致电机系统存在多个谐波子空间,在增加了控制自由度的同时也加大了控制难度.当采用传统矢量控制时,通常需要多个比例积分或比例谐振控制器对每个谐波平面进行控制[6 ⇓ ⇓ -9 ] ,控制系统复杂且参数整定困难,不易于系统的实现.近年来,模型预测控制(Model predictive control,MPC)因其原理简单、响应迅速、无需内环电流控制器等优点[10 ⇓ -12 ] ,为多相电机谐波电流的抑制提供新的思路.然而,传统MPC在一个控制周期中只使用单个电压矢量,这不可避免地在谐波子空间产生谐波电压,而这部分电压作用在多相电机较小的漏抗上,会产生较大的谐波电流,进而增加定子铜耗,降低系统效率[13 ] .为抑制谐波电流,文献[14 ]选用基波子空间最外层和次外层电压矢量,通过构造虚拟电压矢量使谐波子空间映射电压幅值为零,将虚拟电压矢量作为控制集,有效抑制了谐波电流.然而,由于控制集中电压矢量幅值固定不可调,相电流仍存在较大脉动.为解决电流脉动问题,文献[15 ]采用占空比调制策略,在一个控制周期中计算有效电压矢量的作用时间,并在其余时间内插入零电压矢量,提高了电流控制精度.此外,为了进一步抑制电流脉动,基于虚拟电压矢量,文献[16 -17 ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能.然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
Four dimensional current control method of five-phase PMSM based on double frequency vector modulation
1
2019
... 与三相电机不同,多相电机由于相数的增加,导致电机系统存在多个谐波子空间,在增加了控制自由度的同时也加大了控制难度.当采用传统矢量控制时,通常需要多个比例积分或比例谐振控制器对每个谐波平面进行控制[6 ⇓ ⇓ -9 ] ,控制系统复杂且参数整定困难,不易于系统的实现.近年来,模型预测控制(Model predictive control,MPC)因其原理简单、响应迅速、无需内环电流控制器等优点[10 ⇓ -12 ] ,为多相电机谐波电流的抑制提供新的思路.然而,传统MPC在一个控制周期中只使用单个电压矢量,这不可避免地在谐波子空间产生谐波电压,而这部分电压作用在多相电机较小的漏抗上,会产生较大的谐波电流,进而增加定子铜耗,降低系统效率[13 ] .为抑制谐波电流,文献[14 ]选用基波子空间最外层和次外层电压矢量,通过构造虚拟电压矢量使谐波子空间映射电压幅值为零,将虚拟电压矢量作为控制集,有效抑制了谐波电流.然而,由于控制集中电压矢量幅值固定不可调,相电流仍存在较大脉动.为解决电流脉动问题,文献[15 ]采用占空比调制策略,在一个控制周期中计算有效电压矢量的作用时间,并在其余时间内插入零电压矢量,提高了电流控制精度.此外,为了进一步抑制电流脉动,基于虚拟电压矢量,文献[16 -17 ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能.然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
Dual reference frame based current harmonic minimization for dual three-phase PMSM considering inverter voltage limit
1
2021
... 与三相电机不同,多相电机由于相数的增加,导致电机系统存在多个谐波子空间,在增加了控制自由度的同时也加大了控制难度.当采用传统矢量控制时,通常需要多个比例积分或比例谐振控制器对每个谐波平面进行控制[6 ⇓ ⇓ -9 ] ,控制系统复杂且参数整定困难,不易于系统的实现.近年来,模型预测控制(Model predictive control,MPC)因其原理简单、响应迅速、无需内环电流控制器等优点[10 ⇓ -12 ] ,为多相电机谐波电流的抑制提供新的思路.然而,传统MPC在一个控制周期中只使用单个电压矢量,这不可避免地在谐波子空间产生谐波电压,而这部分电压作用在多相电机较小的漏抗上,会产生较大的谐波电流,进而增加定子铜耗,降低系统效率[13 ] .为抑制谐波电流,文献[14 ]选用基波子空间最外层和次外层电压矢量,通过构造虚拟电压矢量使谐波子空间映射电压幅值为零,将虚拟电压矢量作为控制集,有效抑制了谐波电流.然而,由于控制集中电压矢量幅值固定不可调,相电流仍存在较大脉动.为解决电流脉动问题,文献[15 ]采用占空比调制策略,在一个控制周期中计算有效电压矢量的作用时间,并在其余时间内插入零电压矢量,提高了电流控制精度.此外,为了进一步抑制电流脉动,基于虚拟电压矢量,文献[16 -17 ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能.然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
A simplified model predictive control for a dual three-phase PMSM motor with reduced harmonic currents
1
2018
... 与三相电机不同,多相电机由于相数的增加,导致电机系统存在多个谐波子空间,在增加了控制自由度的同时也加大了控制难度.当采用传统矢量控制时,通常需要多个比例积分或比例谐振控制器对每个谐波平面进行控制[6 ⇓ ⇓ -9 ] ,控制系统复杂且参数整定困难,不易于系统的实现.近年来,模型预测控制(Model predictive control,MPC)因其原理简单、响应迅速、无需内环电流控制器等优点[10 ⇓ -12 ] ,为多相电机谐波电流的抑制提供新的思路.然而,传统MPC在一个控制周期中只使用单个电压矢量,这不可避免地在谐波子空间产生谐波电压,而这部分电压作用在多相电机较小的漏抗上,会产生较大的谐波电流,进而增加定子铜耗,降低系统效率[13 ] .为抑制谐波电流,文献[14 ]选用基波子空间最外层和次外层电压矢量,通过构造虚拟电压矢量使谐波子空间映射电压幅值为零,将虚拟电压矢量作为控制集,有效抑制了谐波电流.然而,由于控制集中电压矢量幅值固定不可调,相电流仍存在较大脉动.为解决电流脉动问题,文献[15 ]采用占空比调制策略,在一个控制周期中计算有效电压矢量的作用时间,并在其余时间内插入零电压矢量,提高了电流控制精度.此外,为了进一步抑制电流脉动,基于虚拟电压矢量,文献[16 -17 ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能.然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
Elimination of harmonic currents using a reference voltage vector based-model predictive control for a six-phase PMSM motor
1
2019
... 与三相电机不同,多相电机由于相数的增加,导致电机系统存在多个谐波子空间,在增加了控制自由度的同时也加大了控制难度.当采用传统矢量控制时,通常需要多个比例积分或比例谐振控制器对每个谐波平面进行控制[6 ⇓ ⇓ -9 ] ,控制系统复杂且参数整定困难,不易于系统的实现.近年来,模型预测控制(Model predictive control,MPC)因其原理简单、响应迅速、无需内环电流控制器等优点[10 ⇓ -12 ] ,为多相电机谐波电流的抑制提供新的思路.然而,传统MPC在一个控制周期中只使用单个电压矢量,这不可避免地在谐波子空间产生谐波电压,而这部分电压作用在多相电机较小的漏抗上,会产生较大的谐波电流,进而增加定子铜耗,降低系统效率[13 ] .为抑制谐波电流,文献[14 ]选用基波子空间最外层和次外层电压矢量,通过构造虚拟电压矢量使谐波子空间映射电压幅值为零,将虚拟电压矢量作为控制集,有效抑制了谐波电流.然而,由于控制集中电压矢量幅值固定不可调,相电流仍存在较大脉动.为解决电流脉动问题,文献[15 ]采用占空比调制策略,在一个控制周期中计算有效电压矢量的作用时间,并在其余时间内插入零电压矢量,提高了电流控制精度.此外,为了进一步抑制电流脉动,基于虚拟电压矢量,文献[16 -17 ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能.然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
A novel finite-control-set model predictive current control for five-phase PM motor with continued modulation
1
2020
... 与三相电机不同,多相电机由于相数的增加,导致电机系统存在多个谐波子空间,在增加了控制自由度的同时也加大了控制难度.当采用传统矢量控制时,通常需要多个比例积分或比例谐振控制器对每个谐波平面进行控制[6 ⇓ ⇓ -9 ] ,控制系统复杂且参数整定困难,不易于系统的实现.近年来,模型预测控制(Model predictive control,MPC)因其原理简单、响应迅速、无需内环电流控制器等优点[10 ⇓ -12 ] ,为多相电机谐波电流的抑制提供新的思路.然而,传统MPC在一个控制周期中只使用单个电压矢量,这不可避免地在谐波子空间产生谐波电压,而这部分电压作用在多相电机较小的漏抗上,会产生较大的谐波电流,进而增加定子铜耗,降低系统效率[13 ] .为抑制谐波电流,文献[14 ]选用基波子空间最外层和次外层电压矢量,通过构造虚拟电压矢量使谐波子空间映射电压幅值为零,将虚拟电压矢量作为控制集,有效抑制了谐波电流.然而,由于控制集中电压矢量幅值固定不可调,相电流仍存在较大脉动.为解决电流脉动问题,文献[15 ]采用占空比调制策略,在一个控制周期中计算有效电压矢量的作用时间,并在其余时间内插入零电压矢量,提高了电流控制精度.此外,为了进一步抑制电流脉动,基于虚拟电压矢量,文献[16 -17 ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能.然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
A proof of concept study of predictive current control for VSI-driven asymmetrical dual three-phase AC machines
1
2009
... 与三相电机不同,多相电机由于相数的增加,导致电机系统存在多个谐波子空间,在增加了控制自由度的同时也加大了控制难度.当采用传统矢量控制时,通常需要多个比例积分或比例谐振控制器对每个谐波平面进行控制[6 ⇓ ⇓ -9 ] ,控制系统复杂且参数整定困难,不易于系统的实现.近年来,模型预测控制(Model predictive control,MPC)因其原理简单、响应迅速、无需内环电流控制器等优点[10 ⇓ -12 ] ,为多相电机谐波电流的抑制提供新的思路.然而,传统MPC在一个控制周期中只使用单个电压矢量,这不可避免地在谐波子空间产生谐波电压,而这部分电压作用在多相电机较小的漏抗上,会产生较大的谐波电流,进而增加定子铜耗,降低系统效率[13 ] .为抑制谐波电流,文献[14 ]选用基波子空间最外层和次外层电压矢量,通过构造虚拟电压矢量使谐波子空间映射电压幅值为零,将虚拟电压矢量作为控制集,有效抑制了谐波电流.然而,由于控制集中电压矢量幅值固定不可调,相电流仍存在较大脉动.为解决电流脉动问题,文献[15 ]采用占空比调制策略,在一个控制周期中计算有效电压矢量的作用时间,并在其余时间内插入零电压矢量,提高了电流控制精度.此外,为了进一步抑制电流脉动,基于虚拟电压矢量,文献[16 -17 ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能.然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
Model predictive control of six-phase induction motor drives using virtual voltage vectors
2
2018
... 与三相电机不同,多相电机由于相数的增加,导致电机系统存在多个谐波子空间,在增加了控制自由度的同时也加大了控制难度.当采用传统矢量控制时,通常需要多个比例积分或比例谐振控制器对每个谐波平面进行控制[6 ⇓ ⇓ -9 ] ,控制系统复杂且参数整定困难,不易于系统的实现.近年来,模型预测控制(Model predictive control,MPC)因其原理简单、响应迅速、无需内环电流控制器等优点[10 ⇓ -12 ] ,为多相电机谐波电流的抑制提供新的思路.然而,传统MPC在一个控制周期中只使用单个电压矢量,这不可避免地在谐波子空间产生谐波电压,而这部分电压作用在多相电机较小的漏抗上,会产生较大的谐波电流,进而增加定子铜耗,降低系统效率[13 ] .为抑制谐波电流,文献[14 ]选用基波子空间最外层和次外层电压矢量,通过构造虚拟电压矢量使谐波子空间映射电压幅值为零,将虚拟电压矢量作为控制集,有效抑制了谐波电流.然而,由于控制集中电压矢量幅值固定不可调,相电流仍存在较大脉动.为解决电流脉动问题,文献[15 ]采用占空比调制策略,在一个控制周期中计算有效电压矢量的作用时间,并在其余时间内插入零电压矢量,提高了电流控制精度.此外,为了进一步抑制电流脉动,基于虚拟电压矢量,文献[16 -17 ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能.然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
... ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能.然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
A constant switching frequency finite-control-set predictive current control scheme of five-phase inverter with duty-ratio optimization
2
2018
... 与三相电机不同,多相电机由于相数的增加,导致电机系统存在多个谐波子空间,在增加了控制自由度的同时也加大了控制难度.当采用传统矢量控制时,通常需要多个比例积分或比例谐振控制器对每个谐波平面进行控制[6 ⇓ ⇓ -9 ] ,控制系统复杂且参数整定困难,不易于系统的实现.近年来,模型预测控制(Model predictive control,MPC)因其原理简单、响应迅速、无需内环电流控制器等优点[10 ⇓ -12 ] ,为多相电机谐波电流的抑制提供新的思路.然而,传统MPC在一个控制周期中只使用单个电压矢量,这不可避免地在谐波子空间产生谐波电压,而这部分电压作用在多相电机较小的漏抗上,会产生较大的谐波电流,进而增加定子铜耗,降低系统效率[13 ] .为抑制谐波电流,文献[14 ]选用基波子空间最外层和次外层电压矢量,通过构造虚拟电压矢量使谐波子空间映射电压幅值为零,将虚拟电压矢量作为控制集,有效抑制了谐波电流.然而,由于控制集中电压矢量幅值固定不可调,相电流仍存在较大脉动.为解决电流脉动问题,文献[15 ]采用占空比调制策略,在一个控制周期中计算有效电压矢量的作用时间,并在其余时间内插入零电压矢量,提高了电流控制精度.此外,为了进一步抑制电流脉动,基于虚拟电压矢量,文献[16 -17 ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能.然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
... ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
Performance evaluation of two-vector-based model predictive current control of PMSM drives
2
2018
... 与三相电机不同,多相电机由于相数的增加,导致电机系统存在多个谐波子空间,在增加了控制自由度的同时也加大了控制难度.当采用传统矢量控制时,通常需要多个比例积分或比例谐振控制器对每个谐波平面进行控制[6 ⇓ ⇓ -9 ] ,控制系统复杂且参数整定困难,不易于系统的实现.近年来,模型预测控制(Model predictive control,MPC)因其原理简单、响应迅速、无需内环电流控制器等优点[10 ⇓ -12 ] ,为多相电机谐波电流的抑制提供新的思路.然而,传统MPC在一个控制周期中只使用单个电压矢量,这不可避免地在谐波子空间产生谐波电压,而这部分电压作用在多相电机较小的漏抗上,会产生较大的谐波电流,进而增加定子铜耗,降低系统效率[13 ] .为抑制谐波电流,文献[14 ]选用基波子空间最外层和次外层电压矢量,通过构造虚拟电压矢量使谐波子空间映射电压幅值为零,将虚拟电压矢量作为控制集,有效抑制了谐波电流.然而,由于控制集中电压矢量幅值固定不可调,相电流仍存在较大脉动.为解决电流脉动问题,文献[15 ]采用占空比调制策略,在一个控制周期中计算有效电压矢量的作用时间,并在其余时间内插入零电压矢量,提高了电流控制精度.此外,为了进一步抑制电流脉动,基于虚拟电压矢量,文献[16 -17 ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能.然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
... ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
Model predictive control of six-phase induction motor drives using two virtual voltage vectors
2
2019
... 与三相电机不同,多相电机由于相数的增加,导致电机系统存在多个谐波子空间,在增加了控制自由度的同时也加大了控制难度.当采用传统矢量控制时,通常需要多个比例积分或比例谐振控制器对每个谐波平面进行控制[6 ⇓ ⇓ -9 ] ,控制系统复杂且参数整定困难,不易于系统的实现.近年来,模型预测控制(Model predictive control,MPC)因其原理简单、响应迅速、无需内环电流控制器等优点[10 ⇓ -12 ] ,为多相电机谐波电流的抑制提供新的思路.然而,传统MPC在一个控制周期中只使用单个电压矢量,这不可避免地在谐波子空间产生谐波电压,而这部分电压作用在多相电机较小的漏抗上,会产生较大的谐波电流,进而增加定子铜耗,降低系统效率[13 ] .为抑制谐波电流,文献[14 ]选用基波子空间最外层和次外层电压矢量,通过构造虚拟电压矢量使谐波子空间映射电压幅值为零,将虚拟电压矢量作为控制集,有效抑制了谐波电流.然而,由于控制集中电压矢量幅值固定不可调,相电流仍存在较大脉动.为解决电流脉动问题,文献[15 ]采用占空比调制策略,在一个控制周期中计算有效电压矢量的作用时间,并在其余时间内插入零电压矢量,提高了电流控制精度.此外,为了进一步抑制电流脉动,基于虚拟电压矢量,文献[16 -17 ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能.然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
... -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
双重d-q 空间下五相电压源逆变器空间矢量脉宽调制死区效应分析与补偿
1
2017
... 与三相电机不同,多相电机由于相数的增加,导致电机系统存在多个谐波子空间,在增加了控制自由度的同时也加大了控制难度.当采用传统矢量控制时,通常需要多个比例积分或比例谐振控制器对每个谐波平面进行控制[6 ⇓ ⇓ -9 ] ,控制系统复杂且参数整定困难,不易于系统的实现.近年来,模型预测控制(Model predictive control,MPC)因其原理简单、响应迅速、无需内环电流控制器等优点[10 ⇓ -12 ] ,为多相电机谐波电流的抑制提供新的思路.然而,传统MPC在一个控制周期中只使用单个电压矢量,这不可避免地在谐波子空间产生谐波电压,而这部分电压作用在多相电机较小的漏抗上,会产生较大的谐波电流,进而增加定子铜耗,降低系统效率[13 ] .为抑制谐波电流,文献[14 ]选用基波子空间最外层和次外层电压矢量,通过构造虚拟电压矢量使谐波子空间映射电压幅值为零,将虚拟电压矢量作为控制集,有效抑制了谐波电流.然而,由于控制集中电压矢量幅值固定不可调,相电流仍存在较大脉动.为解决电流脉动问题,文献[15 ]采用占空比调制策略,在一个控制周期中计算有效电压矢量的作用时间,并在其余时间内插入零电压矢量,提高了电流控制精度.此外,为了进一步抑制电流脉动,基于虚拟电压矢量,文献[16 -17 ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能.然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
Analysis and compensation of dead-time effects in five-phase voltage source inverters with space vector PWM techniques based on dual d-q space concept
1
2017
... 与三相电机不同,多相电机由于相数的增加,导致电机系统存在多个谐波子空间,在增加了控制自由度的同时也加大了控制难度.当采用传统矢量控制时,通常需要多个比例积分或比例谐振控制器对每个谐波平面进行控制[6 ⇓ ⇓ -9 ] ,控制系统复杂且参数整定困难,不易于系统的实现.近年来,模型预测控制(Model predictive control,MPC)因其原理简单、响应迅速、无需内环电流控制器等优点[10 ⇓ -12 ] ,为多相电机谐波电流的抑制提供新的思路.然而,传统MPC在一个控制周期中只使用单个电压矢量,这不可避免地在谐波子空间产生谐波电压,而这部分电压作用在多相电机较小的漏抗上,会产生较大的谐波电流,进而增加定子铜耗,降低系统效率[13 ] .为抑制谐波电流,文献[14 ]选用基波子空间最外层和次外层电压矢量,通过构造虚拟电压矢量使谐波子空间映射电压幅值为零,将虚拟电压矢量作为控制集,有效抑制了谐波电流.然而,由于控制集中电压矢量幅值固定不可调,相电流仍存在较大脉动.为解决电流脉动问题,文献[15 ]采用占空比调制策略,在一个控制周期中计算有效电压矢量的作用时间,并在其余时间内插入零电压矢量,提高了电流控制精度.此外,为了进一步抑制电流脉动,基于虚拟电压矢量,文献[16 -17 ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能.然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
永磁同步电机电流谐波抑制策略
1
2019
... 与三相电机不同,多相电机由于相数的增加,导致电机系统存在多个谐波子空间,在增加了控制自由度的同时也加大了控制难度.当采用传统矢量控制时,通常需要多个比例积分或比例谐振控制器对每个谐波平面进行控制[6 ⇓ ⇓ -9 ] ,控制系统复杂且参数整定困难,不易于系统的实现.近年来,模型预测控制(Model predictive control,MPC)因其原理简单、响应迅速、无需内环电流控制器等优点[10 ⇓ -12 ] ,为多相电机谐波电流的抑制提供新的思路.然而,传统MPC在一个控制周期中只使用单个电压矢量,这不可避免地在谐波子空间产生谐波电压,而这部分电压作用在多相电机较小的漏抗上,会产生较大的谐波电流,进而增加定子铜耗,降低系统效率[13 ] .为抑制谐波电流,文献[14 ]选用基波子空间最外层和次外层电压矢量,通过构造虚拟电压矢量使谐波子空间映射电压幅值为零,将虚拟电压矢量作为控制集,有效抑制了谐波电流.然而,由于控制集中电压矢量幅值固定不可调,相电流仍存在较大脉动.为解决电流脉动问题,文献[15 ]采用占空比调制策略,在一个控制周期中计算有效电压矢量的作用时间,并在其余时间内插入零电压矢量,提高了电流控制精度.此外,为了进一步抑制电流脉动,基于虚拟电压矢量,文献[16 -17 ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能.然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
Current harmonics suppression strategies of permanent magnet synchronous motor
1
2019
... 与三相电机不同,多相电机由于相数的增加,导致电机系统存在多个谐波子空间,在增加了控制自由度的同时也加大了控制难度.当采用传统矢量控制时,通常需要多个比例积分或比例谐振控制器对每个谐波平面进行控制[6 ⇓ ⇓ -9 ] ,控制系统复杂且参数整定困难,不易于系统的实现.近年来,模型预测控制(Model predictive control,MPC)因其原理简单、响应迅速、无需内环电流控制器等优点[10 ⇓ -12 ] ,为多相电机谐波电流的抑制提供新的思路.然而,传统MPC在一个控制周期中只使用单个电压矢量,这不可避免地在谐波子空间产生谐波电压,而这部分电压作用在多相电机较小的漏抗上,会产生较大的谐波电流,进而增加定子铜耗,降低系统效率[13 ] .为抑制谐波电流,文献[14 ]选用基波子空间最外层和次外层电压矢量,通过构造虚拟电压矢量使谐波子空间映射电压幅值为零,将虚拟电压矢量作为控制集,有效抑制了谐波电流.然而,由于控制集中电压矢量幅值固定不可调,相电流仍存在较大脉动.为解决电流脉动问题,文献[15 ]采用占空比调制策略,在一个控制周期中计算有效电压矢量的作用时间,并在其余时间内插入零电压矢量,提高了电流控制精度.此外,为了进一步抑制电流脉动,基于虚拟电压矢量,文献[16 -17 ]提出通用两矢量的MPC算法,使电机在全速域内运行时均能保持较好的稳态性能.然而,文献[14 ⇓ ⇓ -17 ]通过构造虚拟电压矢量虽然有效抑制了谐波电流,提升了电流控制精度,但同时也消除了控制集中用于调节谐波子空间分量的电压矢量,因此,谐波子空间分量本质上属于开环控制.在实际系统中,死区效应和变流器管压降等非线性因素会导致最终合成的电压矢量在谐波子空间的幅值非零,进而产生谐波电流[18 -19 ] .由于谐波子空间开环控制,上述产生的谐波电流将无法得到有效抑制,从而限制了控制系统性能的提升. ...
Space vector PWM control of dual three-phase induction machine using vector space decomposition
1
1995
... 双三相PMSG是一个高阶、非线性、强耦合的六维系统.为了简化分析,假设定子电流和转子永磁体产生的气隙磁链都为正弦分布,忽略铁心饱和效应以及涡流、磁滞损耗.根据矢量空间解耦原理[20 ] ,将电机各变量分别映射到三个彼此正交的子空间,即α-β 基波子空间、x-y 谐波子空间和o 1 -o 2 零序子空间.其中,只有α-β 子空间分量参与机电能量转换,x-y 子空间和o 1 -o 2 子空间分量只产生谐波损耗.由于电机绕组采用中性点隔离的连接方式,o 1 -o 2 子空间各变量为零,因此无需考虑o 1 -o 2 子空间.进一步,按电动机惯例,通过Park变换得到双三相PMSG在d-q 坐标系和x-y 坐标系的电压方程 ...
双三相永磁同步电机直接转矩控制谐波电流抑制研究
1
2015
... 图5 a为合并后单个控制周期内的PWM波形.由图5 a可知,电压矢量个数的增加将导致单个控制周期内每相桥臂的开关管动作多次,系统损耗增加且不易于控制算法的实现[21 ] .此外,变化的开关频率会导致电压频谱的扩展,不利于对开关频率处的电磁干扰进行集中滤波处理[22 ] .根据脉宽调制等效输出的原理,只要保证各桥臂开关作用时间相等,就可以输出相同的电压幅值,调整后的各桥臂开关信号如图5 b所示. ...
Harmonic currents suppression in direct torque control of dual three-phase permanent magnet synchronous motor
1
2015
... 图5 a为合并后单个控制周期内的PWM波形.由图5 a可知,电压矢量个数的增加将导致单个控制周期内每相桥臂的开关管动作多次,系统损耗增加且不易于控制算法的实现[21 ] .此外,变化的开关频率会导致电压频谱的扩展,不利于对开关频率处的电磁干扰进行集中滤波处理[22 ] .根据脉宽调制等效输出的原理,只要保证各桥臂开关作用时间相等,就可以输出相同的电压幅值,调整后的各桥臂开关信号如图5 b所示. ...
Multi-vector-based model predictive torque control for a six-phase PMSM motor with fixed switching frequency
1
2019
... 图5 a为合并后单个控制周期内的PWM波形.由图5 a可知,电压矢量个数的增加将导致单个控制周期内每相桥臂的开关管动作多次,系统损耗增加且不易于控制算法的实现[21 ] .此外,变化的开关频率会导致电压频谱的扩展,不利于对开关频率处的电磁干扰进行集中滤波处理[22 ] .根据脉宽调制等效输出的原理,只要保证各桥臂开关作用时间相等,就可以输出相同的电压幅值,调整后的各桥臂开关信号如图5 b所示. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}