

1 引言
如今,永磁同步电机(Permanent magnet synchronic motor, PMSM)在高性能要求变速系统中的应用越来越广泛[1,2,3,4]。永磁同步电机的高性能矢量控制需要精确的转子位置信息,通常要在转子轴端安装位置传感器[5,6]。然而,这些传感器会使系统的成本增加、体积增大,极易受外界环境干扰。为克服这些缺点,永磁同步电机的无传感器控制(Sensorless control)技术成为热门研究课题。通常,PMSM无位置传感器的实现方法可以根据电机运行频率范围分为两类。当电机运行频率在中/高速时,转子位置信息的获取主要利用模型法[7,8,9,10,11]。而当电机零/低速运行时,主要应用高频信号注入法(High frequency signal injection,HFSI)[12]来获取转子位置及转速。
高频信号的注入会在电机基频电流中引入高频响应电流。因此,为保证系统跟随给定的动态性能,应使电机中的反馈电流平滑真实且不包含高频成分。故不可避免地要使用到低通滤波器(Low pass filter, LPF)处理。此外,高频信号注入虽然能够实现电机零/低速无传感器控制的运行,但信号的注入增加了信号处理的复杂程度,在对高频电流响应的处理过程中也需要借助LPF、高通滤波器(High pass filter, HPF)或带通滤波器(Band pass filter, BPF)和转子位置观测器等实现转速和转子位置的估计。滤波器截止频率的选择使得系统未确定参数数量增加,降低了系统对于参数的鲁棒性,影响转子位置的观测精度,不利于系统的设计。滤波器的引入限制了系统的带宽,影响系统动态性能。因此,众多学者对此展开了探讨钻研。文献[13]中,二阶广义积分器被提出与PI调节器相结合可以提高电流环的动态性能,但积分器的引入无疑加大了系统的复杂性和计算量[14]。除此之外,针对注入信号与调制信号的时序关系,文献[15]提出了滑动平均滤波器(Moving average filter,MAF),利用高频信号的周期性和半波对称性来消除特定谐波,结构简单,仅需设计采样深度一个参数,便于实现,用于取代传统的LPF、BPF和HPF,实现高动态品质的无传感器控制。
文章以永磁同步电机低速无传感器控制方法为基础,首先分析了传统滤波器对永磁同步电机无位置传感器控制系统的影响,进而提出基于MAF的无传感器控制方法。其次,对传统滤波器和滑动平均滤波器在离散域进行分析,验证所提算法的理论可行性。最后分别利用仿真平台和永磁同步电机对拖试验平台验证了算法的有效性。
2 无传感器系统传统信号处理方式
2.1 高频方波信号注入转子位置观测
PMSM在d-q轴系下的高频数学模型为[16]
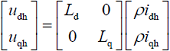
式中,udh、uqh分别为d-q轴高频电压分量;idh、iqh分别为d-q轴系下的高频电流分量;Ld、Lq分别为d-q轴电感;ρ为微分算子。
注入的信号数学表达式为
式中,${u_{{\rm{inj}}}}$表示注入的高频方波信号;Uinj表示注入信号幅值;Tinj表示注入信号的周期;n表示已经注入信号的周期。
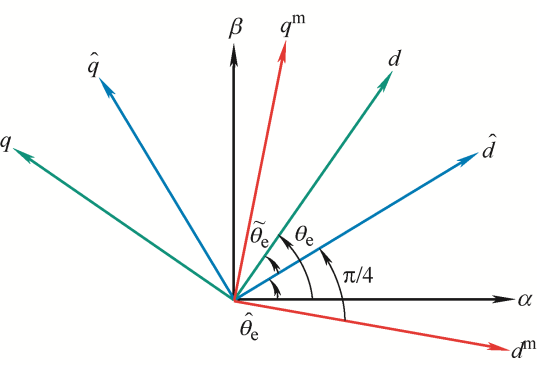
图1为各轴系间的相位关系,按顺时针方向依次为两相旋转坐标系(d-q轴系)、估计的两相旋转坐标系(${\rm{\hat d}}{ - }{\rm{\hat q}}$轴系)、两相静止坐标系(α-β轴系)以及 滞后${\rm{\hat d}}{ - }{\rm{\hat q}}$轴系45°的两相旋转测量轴系(${{\rm{d}}^{m}} { - }{{\rm{q}}^ {m}}$轴系)。
图1
从测量轴系提取转子位置误差为[16]
式中,${\tilde \theta _{e}}$为从测量轴系提取转子位置误差;$I_{{\rm{dh}}}^{\rm{m}}$、$I_{{\rm{qh}}}^{\rm{m}}$为测量轴系下的高频电流信号的幅值。
由式(3)可知,可以根据电流的幅值计算转子位置误差,因此,获得高频电流响应的幅值显得尤为重要。通过高通滤波器处理测量轴系下的总电流可以分离出高频电流响应的幅值。对分离到的波形进行绝对值处理,可得到幅值不变、频率倍增的非负信号,可以采用低通滤波器分离出包含转子位置误差信号的直流信号。图2为位置误差信号提取流程图,同时为了提高观测器输入对电机参数及输入电压幅值的鲁棒性,对提取到的电流幅值进行标幺化处理。
图2

2.2 传统滤波器对系统影响分析
永磁电机在零/低速条件下使用额外的信号注入来获取转子位置及转速信息,因此系统中需要引入低通滤波器来滤除电流中的高频成分,滤波输出的基频电流用于完成电流环的反馈。然而滤波器的使用会加大系统的时间延迟常数Td,破坏电流环的一阶惯性结构,使得电流环带宽降低,限制了电流环的动态性能,等效后的电流环框图如图3所示。
图3
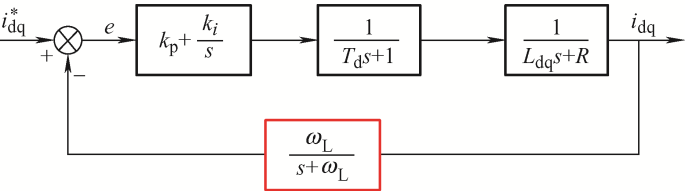
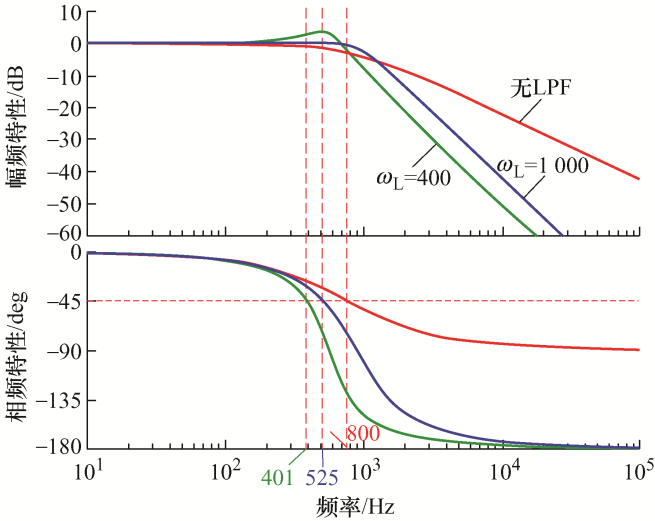
当设置电流环带宽ωc在800 Hz处,LPF的截止频率在400 Hz、1 000 Hz时,可以得到系统闭环传递函数的伯德图,根据图4中的曲线变化和带宽标记可知,随着LPF截止频率的降低,电流环的带宽由800 Hz减小为525 Hz和401 Hz。因此,取代电流反馈中的LPF对提高电流环带宽,改善系统动态性能具有重要意义。
图4
同时,为了获取准确的高频电流信号计算转子位置误差,不可避免地需要使用LPF和BPF处理采样后的电流。首先,在设计HPF或BPF时,低阶次的滤波器会降低系统对高频信号的信噪比,引起观测转子位置的波动,而高阶次的滤波器则会影响系统的动态性能。其次,在设计LPF时既要保证足够高的带宽,以使系统有较快的动态响应速度,还要限制系统的带宽,保证有效滤除信号中的高频成分,二者是互相矛盾的。这些传统滤波器的使用会因增大了系统信号处理环节中的延迟时间从而影响到系统带宽,进而降低系统输出跟随给定的动态性能。因此,设计合理的算法取代传统滤波器,使之能够有较快的动态响应,同时能够有效滤除信号,更好地实现永磁电机无传感器控制。
3 基于滑动平均滤波的信号处理方法
3.1 滑动平均滤波算法
3.1.1 滑动平均滤波器数学模型
针对第2节提出的问题,本文应用滑动平均滤波器(MAF)代替传统滤波器,以提高电流环带宽同时提高转子位置观测器动态响应。滑动平均滤波器频域表达式为[15]
式中,Th为MAF滤波长度,其幅频特性为
根据式(5)可知,当信号频率为1/Th的整数倍N时,经过MAF的输出幅值均为零,说明MAF可以有效滤除信号中的高频成分,获得基频成分。用Pade公式去近似算法中的纯滞后环节时,离散建模后MAF为
在离散控制系统中,MAF的离散表现形式为
式中,N为采样深度,N=Th/Ts;Ts为采样周期;x(k)为电流采样值;i为采样时刻。离散系统差分方程为
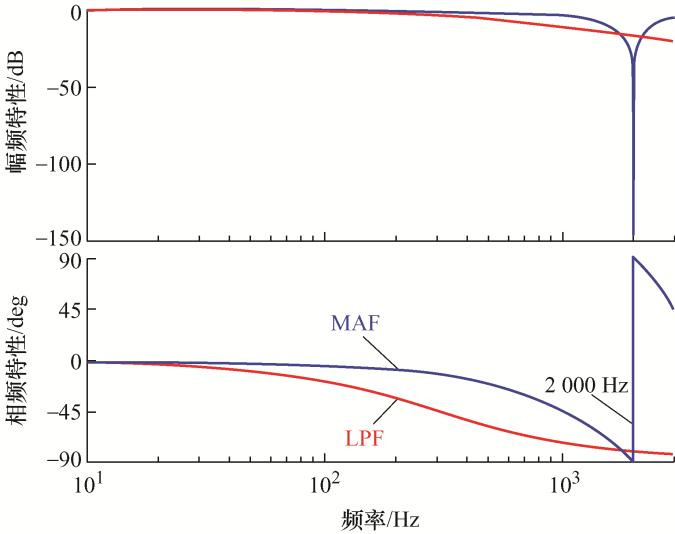
3.1.2 滑动平均滤波算法频域分析
图5
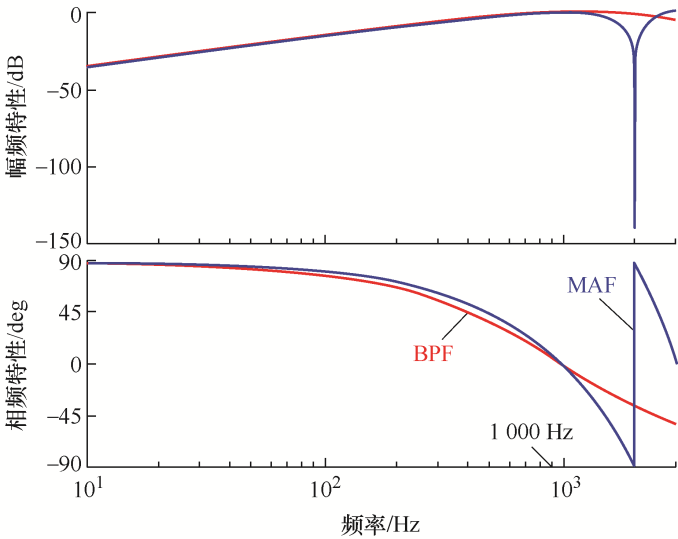
图6
3.2 高频信号处理环节改进
3.2.1 电流环反馈环节改进
以载波频率是注入频率的8倍为例,利用MAF替代反馈电流环滤波器。如图7所示为改进控制系统总体框图。
图7
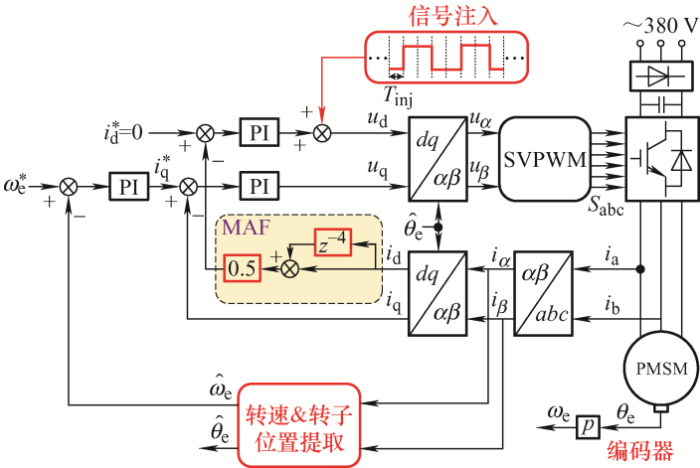
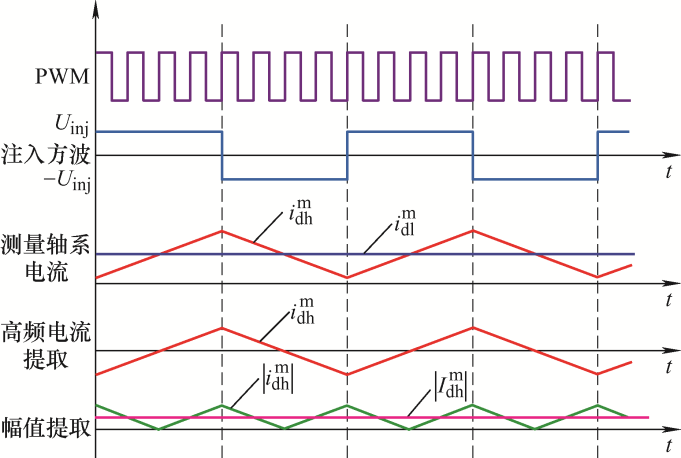
首先,由于α、β轴系中均能够感应出高频响应电流,而在q轴中感应出的高频响应电流在转子位置误差趋近于零时幅值很小,因此,可在d-q轴系中仅对d轴电流进行滤波,减少了滤波器的数量。其次,利用滑动平均方法取代传统滤波器的使用,当注入频率为载波频率的1/8时,根据d轴高频电流响应的正负规律,可将滑动平均的电流采样间隔设为4个载波周期。为保证电流环的带宽,对基频电流设置的LPF的截止频率不能过小,当电流环带宽设置为800 Hz时,截止频率为900 Hz的LPF对高频响应电流的衰减仅为-3.47 dB。而对于滑动平均来说,由于载波频率和注入频率的8倍关系,同时根据电流响应时序图(图8)可知,当注入方波极性不变时,测量轴系下的高频电流响应呈单调递增或递减的变化趋势,因此每隔4个载波周期,高频电流响应处于极点,此时利用相邻两个极点作和就可以获得基频电流,可以很好滤除高频响应电流。
图8
3.2.2 转子位置观测环节改进
为消除滤波器的使用给位置观测带来的不利影响,采用滑动平均算法优化信号处理过程,利用载波频率与注入频率之间的关系对测量轴系的电流进行处理,从而取代滤波器。改进后的转子位置误差信号提取流程如图9所示。
图9
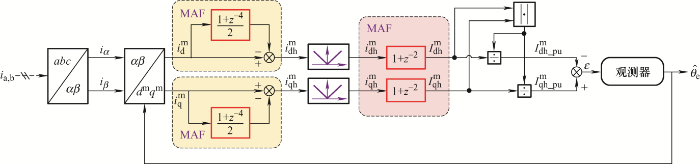
位置误差信号提取过程中电流响应时序图如 图8所示。当注入方波极性不变时,测量轴系下的高频电流响应呈单调的变化趋势,因此每隔4个载波周期,高频电流响应处于极点,此时利用相邻两个极点作和与测量轴系总电流相减即可获得高频电流,这一环节代替了传统方法中BPF的使用。将提取到的高频电流取绝对值,就可得到频率倍增且非负的电流信号,此信号的相邻峰值点仅隔2个载波周期,再次通过相邻峰值点作和的形式即可获得带有转子位置信息的高频电流幅值,这一环节代替了传统方法中LPF的使用。
4 试验结果分析
4.1 永磁电机试验平台
在图10所示的永磁同步电机对拖加载试验平台上进行测试。
图10
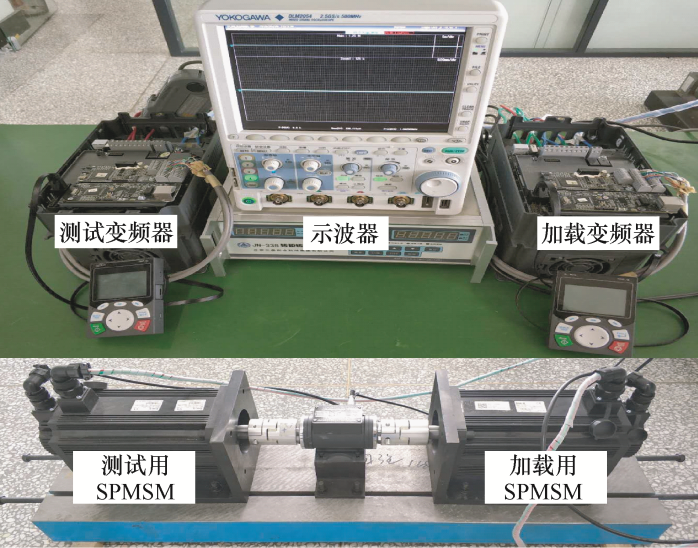
表1 表贴式永磁同步电机参数表
| 参数 | 数值 |
|---|---|
| 额定功率/kW | 7.5 |
| 额定电压/V | 380 |
| 额定电流/A | 20 |
| 额定转矩/(N·m) | 48 |
| 转动惯量/(kg·m2) | 0.017 33 |
| 额定转速/(r/min) | 1 500 |
| 定子电阻/Ω | 0.273 |
| 定子电感/mH | 1.05 |
| 极对数 | 4 |
4.2 电机稳态运行性能提升试验结果
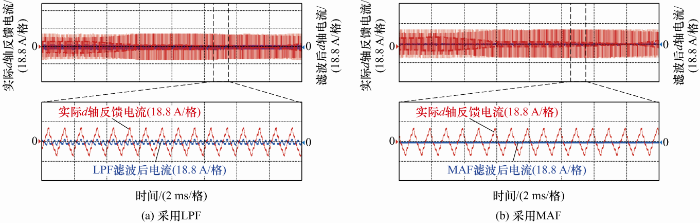
图11为空载状态下永磁同步电机运行于3 Hz时${\rm{\hat d}} { - }{\rm{\hat q}}$轴滤波前、后基频反馈电流。图11a为使用LPF处理${\rm{\hat d}}$轴反馈电流波形,滤波前的${\rm{\hat d}}$轴反馈电流中包含与注入方波同频的1 kHz的高频分量,幅值为12.3 A,而滤波后幅值为1.8 A,与滤波前的电流相比仍存在高频分量。图11b为使用MAF处理${\rm{\hat d}}$轴反馈电流波形,滤波后的电流响应几乎不包含高频分量。因此可以看出,MAF能够有效滤除估计直轴上的高频响应电流,效果优于传统低通滤波器,验证了该方案对于电流环带宽提升的可行性。
图11
4.3 转子位置观测试验结果
图12
图13
图14
图15
5 结论
永磁电机无传感器控制系统因其高可靠性和低成本而被广泛使用,但在零/低速运行条件下,需要额外的高频信号注入转子位置,而高频信号的注入会使系统引入额外的滤波器,限制了系统的动态性能,降低了转子位置观测的精度。本文对比了传统滤波器和滑动平均滤波器对系统的影响,得到如下结论。
(1) 传统滤波器增大了系统信号处理环节中的延迟时间从而影响到系统带宽,进而降低无传感器控制系统输出跟随给定的动态性能。
(2) 采用滑动平均滤波器替代系统中低通滤波器和二阶带通滤波器,在保证电机无位置传感器平稳运行的前提下,提升了转子位置观测的精度和电流环的动态性能。
参考文献
Luenberger观测器在永磁同步电机无传感器控制中的应用研究
[J].
Research on application of Luenberger observer in sensorless control of permanent magnet synchronous motor
[J].
基于电感辨识的电流解耦算法在内置式永磁同步电机弱磁控制中的应用
[J].
Current decoupling algorithm based on inductance identification in the application of interior permanent magnet synchronous motor flux-weakening control
[J].
模糊MRAS方法在永磁同步电机无速度传感器控制系统中的应用
[J].
A fuzzy logic based MRAS scheme used in sensorless control of permanent magnet synchronous motor drives
[J].
永磁同步电机调速系统的积分型滑模变结构控制
[J].
Sliding-mode variable structure control with integral action for permanent magnet synchronous motor
[J].
基于改进型ESO的表贴式永磁同步电机无位置传感器控制
[J].
Sensorless control of surface mounted permanent magnet synchronous motor based on improved extended state observer
[J].
基于无滤波器方波信号注入的永磁同步电机初始位置检测方法
[J].
Filterless square-wave injection based initial position detection for permanent magnet synchronous machines
[J].
永磁同步电机无位置传感器控制技术研究综述
[J].
Position-sensorless control technology of permanent- magnet synchronous motor-A review
[J].
基于估算电流模型的永磁同步电机无速度传感器控制
[J].
Speed sensorless control of PMSM based on estimated current model
[J].
改进的滑模观测器实现PMSM无传感器控制
[J].
Sensorless control of PMSM realized by an improved sliding mode observer
[J].
基于模型参考自适应的无刷双馈电机独立发电系统转速辨识方法
[J].
Speed estimation method for brushless doubly-fed machine stand-alone generation system based on model reference adaptivity
[J].
基于MRAS的永磁同步电机无位置传感器控制策略研究
[J].
Research on permanent magnet synchronous motor position sensorless control strategy based on MRAS
[J].
High-frequency voltage-injection methods and observer design for initial position detection of permanent magnet synchronous machines
[J].DOI:10.1109/TPEL.2017.2773094 URL [本文引用: 1]
Principle and stability analysis of an improved self-sensing control strategy for surface-mounted PMSM drives using second-order generalized integrators
[J].DOI:10.1109/TEC.2017.2738025 URL [本文引用: 1]
Voltage-sensor-less synchronization to unbalanced grids by frequency-adaptive virtual flux estimation
[J].DOI:10.1109/TIE.2011.2168793 URL [本文引用: 1]
Sensorless control of IPMSM using moving-average-filter based PLL on HF pulsating signal injection method
[J].DOI:10.1109/TEC.60 URL [本文引用: 2]
表贴式永磁同步电机无传感器低速运行控制策略研究
[D].
Research on low speed sensorless control strategies for SPMSM
[D].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}