1 引言
分布式电驱动系统主要结构特征是将驱动电机直接安装在驱动轮内或者驱动轮附近,具有驱动传动链短、传动效率高、结构紧凑等突出优点。电动机既是汽车信息单元,同样也是快速反应的控制执行单元,通过独立控制电动机驱/制动转矩容易实现多种动力学控制功能[1 ,2 ] 。随着电动汽车行业的发展和电驱动系统的成熟,分布式驱动方式在部分高端车型上和特种车辆中已开始得到应用,是未来电动汽车电驱动系统重要的发展方向之一。由于实际应用工况存在的安装空间狭窄和动力传输路径独立的特点,对电驱动系统的轻量化和控制精度提出了更高的要求。表贴式永磁同步电机(Surface-mounted permanent magnet synchronous motors, SPMSM)以其结构简单、运行可靠、效率高、控制精度高等诸多优点广泛应用于电动汽车中[3 ,4 ] 。在分布式电驱动系统中,除了需要具备较宽的调速范围,以适应快速启动、加速、低速爬坡等要求以外,对转矩控制精度和不同电机的一致性要求也显著高于传统集中式驱动系统。弱磁控制是拓宽电机运行转速范围的有效手段,并且由于弱磁同时受到转速、直流电压和负载三方面的影响,需要兼顾到动态响应和转矩控制精度方面的要求,因此,对永磁同步电机弱磁控制方法进行研究具有重要意义。
目前已有许多弱磁控制方法被提出,按照电流指令的获取方法主要可分为前馈弱磁法、反馈弱磁和混合弱磁法。前馈弱磁法需要依赖电机参数,一般通过离线标定和查表来实现,该方法具有较好的稳定性和较快的响应,但对电机参数的敏感性使得该方法的鲁棒性较差,当电机参数或者逆变器电压发生变化时,使得电机输出性能会下降。反馈弱磁法主要利用电压调节器实现d 轴电流自动调节。混合弱磁法则同时具备反馈调节单元和前馈调节单元,可以结合两种方法的优点,兼顾动态响应能力和鲁棒性要求。文献[4 ]利用极坐标方法实现了最大转矩电流比和弱磁算法的统一。文献[5 ,6 ]针对弱磁区存在的调节器饱和与电压限制方面的研究并给出解决方法。文献[7 ]给出一种具备自动弱磁功能的限速控制方法。文献[8 ]通过模糊逻辑速度控制策略解决了弱磁区的电流脉动问题。文献[9 ]提出一种自适应电压环,可在保证转矩控制精度的同时实现自动弱磁调节。文献[10 ]分析了直接转矩控制模式下负载角对弱磁性能的影响。文献[11 ]设计了转矩观测器,提升了车用轮毂电机在弱磁区的转矩控制精度。文献[12 ]提出一种混合弱磁策略,在MTPA前馈分量基础上叠加电压闭环反馈分量。文献[13 ]采用谐振控制策略对弱磁区的谐波进行抑制。综上,当前针对弱磁控制研究的热点主要集中在弱磁区电压利用率、弱磁区控制非线性控制及系统稳定性、弱磁区的平滑过渡和弱磁区的转矩响应能力等方面。本文针对分布式电驱动系统的轮毂电机应用场合,提出一种易于工程化并且能够兼容动态响应和稳态性能的改进型反馈式弱磁控制策略。
本文以分布式电驱动系统高功率密度表贴式永磁同步电机为研究对象,首先对满足高转矩输出和宽转速范围下的电机转矩特性进行分析,对比了传统前馈弱磁和反馈式弱磁控制的优缺点,提出一种易于工程化实现的带深度前馈的改进型反馈式弱磁控制策略,详细阐述了其工作原理,并给出其前馈分量和反馈分量的具体计算方法,并通过推导其闭环传递函数对不同弱磁策略下电流环稳定性进行分析,最后利用Matlab/Simulink对所提控制策略的控制性能进行仿真验证。
2 表贴式永磁同步电机转矩特性
2.1 数学模型
(1) $\left\{ \begin{array}{l}{u_d} = {L_d}\frac{{{\rm{d}}{i_d}}}{{{\rm{d}}t}} + R{i_d} - {\omega _r}{L_q}{i_q}\\{u_q} = {L_q}\frac{{{\rm{d}}{i_q}}}{{{\rm{d}}t}} + R{i_q} + {\omega _r}({\psi _f} + {L_d}{i_d})\\{T_e} = \frac{3}{2}{n_p}\left[ {{\psi _f}{i_q} - ({L_d} - {L_q}){i_d}{i_q}} \right] = \frac{3}{2}{n_p}{\psi _f}{i_q}\end{array} \right.$
式中,ud 、uq 、Ld 、Lq 、id 、iq 分别为dq 轴上的等效电压、电感、电流;dq 轴上的等效电阻可认为相等,即Rd =Rq =R ;ψf 为转子永磁体磁链;ωr 为电角速度;np 为转子极对数。由于表贴式永磁电机的交直轴电感近似相等,因此其转矩方程可以简化为式(1),电机的电磁转矩仅和q 轴电流相关,这使得在高速弱磁区电机的转矩控制极为简化,无需考虑d 轴弱磁电流对转矩的影响,相比于凸极式永磁电机,转矩的控制精度会大大提高。
2.2 电机关键设计参数
本文电机定子采用集中式绕组方案,绕组端部距离缩短,并且有利于提升槽满率,转子采用HALBACH表贴式永磁体布置方式,可获得较高的气隙磁密,有利于提升电机的功率密度,电机的关键参数如表1 所示。
2.3 转矩特性
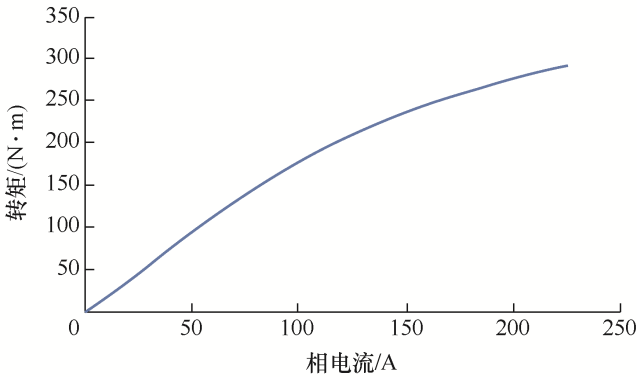
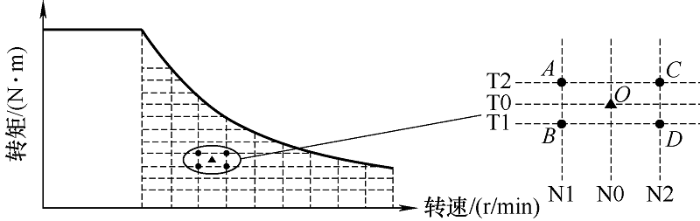
考虑到分布式电驱动系统在特种车辆应用的极限工况下要求电机提供短时较大的峰值转矩需求,同时又为了满足电机的轻量化要求,设计时电机峰值工况对应电机磁路处于较饱和状态,SPMSM转矩电流曲线如图1 所示,可以看出,随着电流增大,转矩的增加幅度明显放缓。
图1
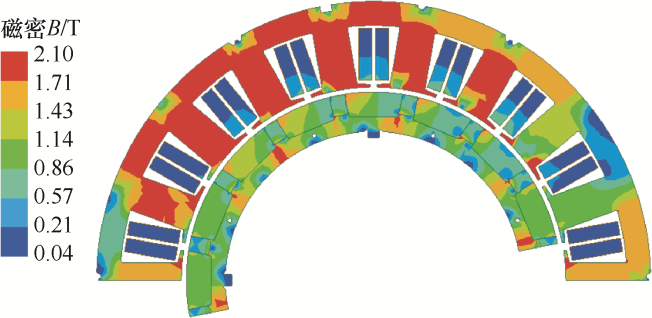
SPMSM在峰值工况下的磁密云图如图2 所示,可以看出,其定子铁心最大磁密达2.1 T,气隙磁密达1.3 T。
图2
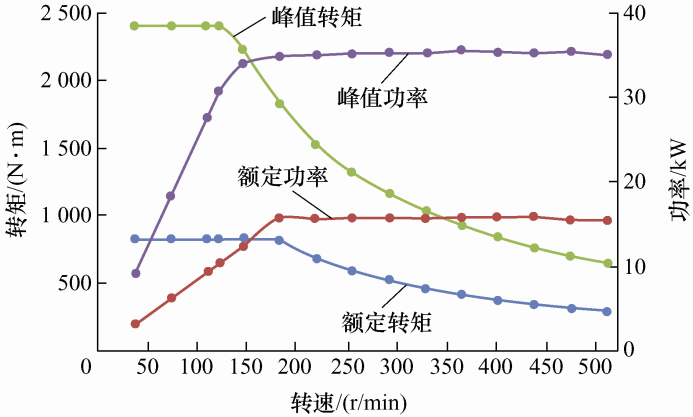
根据图3 所示减速后(速比8∶21)的永磁同步电机总成外特性曲线可知,实际工况要求驱动电机峰值转矩(2 400 N·m短时工作)和高速额定工况(800 N·m持续工作)相差近3倍,而系统实际平直路面上驱动转矩需求甚至更小,约为300 N·m,仅为峰值的1/8,满足宽转矩范围内的转矩高精度控制,表贴式永磁电机是较为理想的选择。
图3
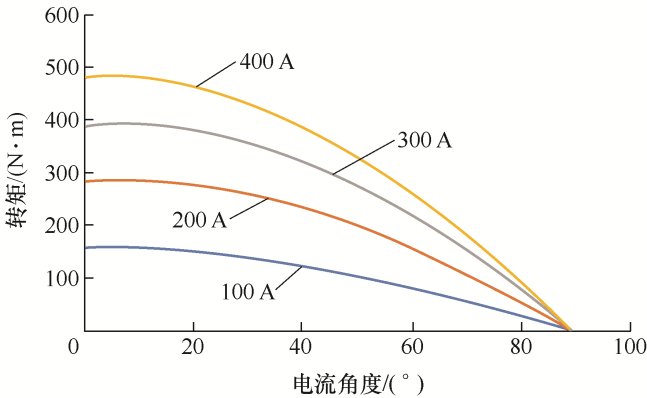
不同电流下,转矩电流角和转矩的关系曲线如图4 所示,可以看出,在不同电流下电机转矩最大点对应的电流角度均为0°,进一步说明了电机的磁阻转矩分量接近为零,因此低速的转矩控制只需要施加q 轴电流即可。同样地,基于有限元仿真结果计算得到额定工况和峰值工况下,电机的dq 轴电感参数如表2 所示。
图4
虽然电机在峰值工况下存在磁路饱和现象,但是由于dq 轴电感差值的绝对值较小,能够产生的磁阻转矩分量基本可以忽略不计,使得在全转速范围内转矩仅和q 轴电流相关,控制复杂度降低。该电感饱和现象主要有以下两方面的影响:① 电机转矩随电流增大进入饱和状态后呈现出非线性特性;② 电机在峰值工况下电感降低,使得额定工况电流环参数不再使用。因此,在控制时应当通过合适的在线修正方法克服上述两方面的不利影响。
3 弱磁控制策略
3.1 传统前馈弱磁控制策略
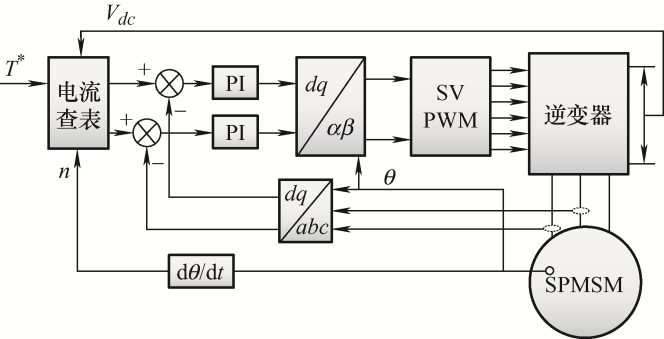
传统前馈弱磁控制策略如图5 所示,在高速弱磁区根据转矩指令、实际转速和母线电压通过预先标定的转矩电流表查表获得不同工况下的dq 轴电流指令,经电流闭环,使驱动电机输出期望的转矩。
图5
由于数字控制芯片的存储资源有限,同时也考虑到实际测试标定的工作量,建立数据表时只能争取固定转速和转矩间隔下工况建立dq 电流表,如图6 所示,以目标工况O 点为例,可以根据邻近区间4个点的标定电流数据查表,理论上区间划分如果足够密并且区间边界点的标定数据足够准确,可以保证O 点的控制精度,但是在工程应用中,由于转速和电流采样的波动,其转矩控制的精度会受到影响。
图6
针对内置式永磁电机,弱磁区转矩同时受dq 电流影响,转矩控制难度进一步加大,因此表贴式电机在转矩精度方面具有天然的优势。
根据第2.3.2节中有限元仿真计算获得的电机特性,由于d 轴电流对于输出转矩没有影响,因此,低速下可以采用id =0的控制策略,其实现过程较为简单。
基于传统前馈弱磁控制策略的永磁电机矢量控制系统只有电流内环,若电流环调节器PI参数依据式(2)进行设计,则d 轴电流环闭环传递函数如式(3)所示
(2) $\left\{ \begin{array}{l}{k_{cid}} = {R \mathord{\left/ {\vphantom {R {{L_d}}}} \right. } {{L_d}}}\\{k_{cpd}} = {L_d}B{W_C}\end{array} \right.$
(3) ${G_{cd}} = {{{k_{cpd}}} \mathord{\left/ {\vphantom {{{k_{cpd}}} {\left( {{L_d}s + {k_{cpd}}} \right)}}} \right. } {\left( {{L_d}s + {k_{cpd}}} \right)}}$
式中,kcpd 、kcid 分别为d 轴电流调节器的比例系数和积分系数;R 为绕组电阻;Ld 为电机d 轴电感;BWC 为电流环带宽,单位rad/s。
从式(3)可以看出电流环闭环传递函数的极点为-kcpd /Ld ,电流环是稳定的。
3.2 反馈式弱磁控制策略
反馈式弱磁策略图7 中,idref 、iqref 分别是d 、q 轴电流指令值,ufdb 为电机绕组端电压幅值,T * 为转矩指令值。绕组端电压最大允许值和端电压幅值的差值经过PI调节器从而输出d 轴电流指令值。
图7
(4) ${u_{fdb}} = \sqrt {u_d^2 + u_q^2}$
转矩电流指令iqref 受到励磁电流指令idref 和变换器最大电流i max 的限制,可表示为
(5) ${i_{qref}} \le \sqrt {i_{\max }^2 - i_{dref}^2}$
考虑到式(4)的非线性,采用小信号分析方法,对式(4)进行线性化,如式(6)所示
(6) $\Delta {u_{fdb}} = \frac{{{u_{d0}}\Delta {u_d} + {u_{q0}}\Delta {u_q}}}{{{u_0}}}$
(7) ${u_0} = \sqrt {u_{d0}^2 + u_{q0}^2}$
式中,下标“0”表示变量的稳态值,“Δ”表示稳态值附近的扰动。
(8) $\left\{ \begin{array}{l}\Delta {u_d} = (R + {L_d}s)\Delta {i_d} - {L_q}{\omega _{e0}}\Delta {i_q} - {L_q}{i_{q0}}\Delta {\omega _e}\\\Delta {u_q} = (R + {L_q}s)\Delta {i_q} + {L_d}{\omega _{e0}}\Delta {i_d} + ({L_d}{i_{d0}} + {\psi _f})\Delta {\omega _e}\end{array} \right.$
将式(8)代入式(6)可得式(9)。式(9)中的第二项和第三项可视为扰动,则式(9)可变换为
(9) $\begin{array}{c}\Delta {u_{fdb}} = \frac{{\left[ {{u_{d0}}(R + {L_d}s) + {u_{q0}}{L_d}{\omega _{e0}}} \right]\Delta {i_d}}}{{{u_0}}} + \\\frac{{\left[ {{u_{q0}}(R + {L_q}s) - {u_{d0}}{L_q}{\omega _{e0}}} \right]\Delta {i_q}}}{{{u_0}}} + \\\frac{{\left[ {{u_{q0}}({\psi _f} + {L_d}{i_{d0}}) - {u_{d0}}{L_q}{i_{q0}}} \right]\Delta {\omega _e}}}{{{u_0}}}\end{array}$
(10) ${G_1} = \frac{{\Delta {u_{fdb}}}}{{\Delta {i_d}}} = \frac{{{u_{d0}}(R + {L_d}s) + {u_{q0}}{L_d}{\omega _{e0}}}}{{{u_0}}}$
反馈式弱磁电压环小信号模型如图8 所示。 图8 中,Gfw 为弱磁PI调节器,表达式为
(11) ${G_{fw}} = {k_{fwp}} + \frac{{{k_{fwi}}}}{s}$
图8
式中,kfwp 和kfwi 分别为弱磁调节器的比例和积分 系数。
(12) ${G_{cdu}} = \frac{{\Delta {u_{fdb}}}}{{\Delta {i_{dref}}}} = \frac{{{G_{cd}}{G_1}}}{{1 + {G_{fw}}{G_{cd}}{G_1}}}$
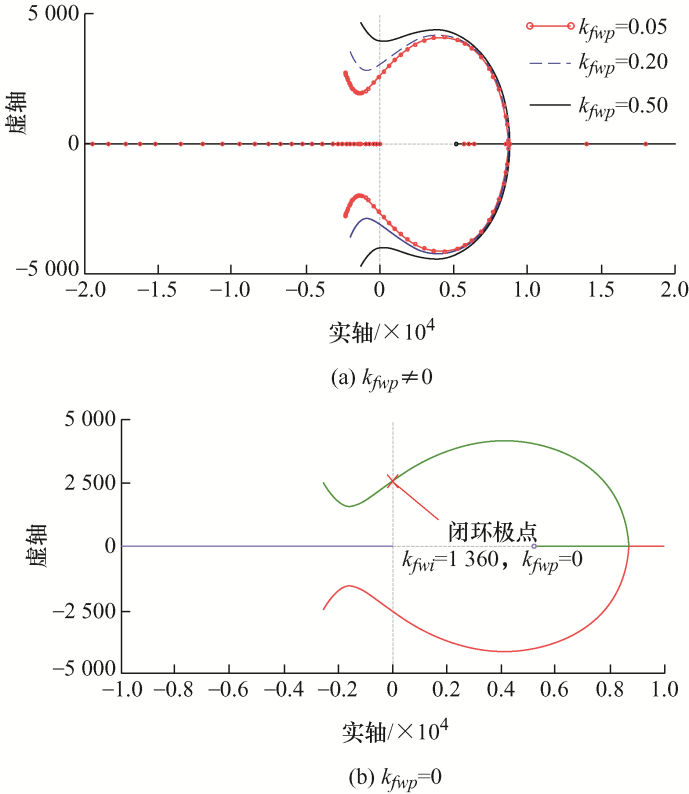
将kfwi 认为是开环增益,则弱磁电压环等效开环传递函数如式(13)所示,根轨迹如图9 所示。
(13) ${G_{eotf}} = \frac{{{k_{cpd}}{L_d}{u_{d0}}s + {k_{cpd}}{u_{d0}}R + {k_{cpd}}{u_{q0}}{L_d}{\omega _{e0}}}}{{{L_d}{u_{d0}}{k_{fwp}}{k_{cpd}}{s^2} + ({k_{fwp}}{k_{cpd}}{u_{d0}}R + {k_{fwp}}{k_{cpd}}{u_{q0}}{L_d}{\omega _{e0}} + {k_{cpd}}{u_0})}}$
图9
从图9 a可以看出,随着积分系数kfwi 的增大,系统极点从复数域左半平面移动到右半平面,系统逐渐不稳定;比例系数kfwp 越小,系统越稳定。
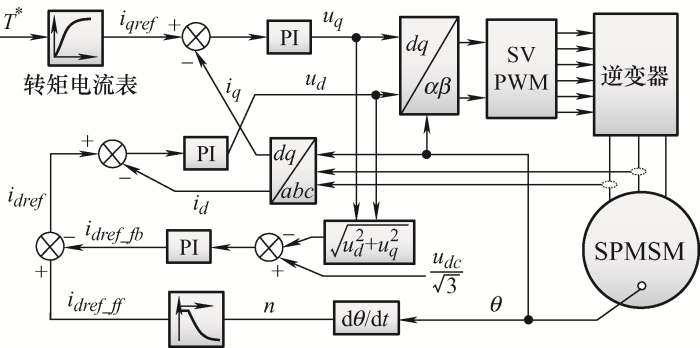
3.3 改进型反馈式弱磁控制策略
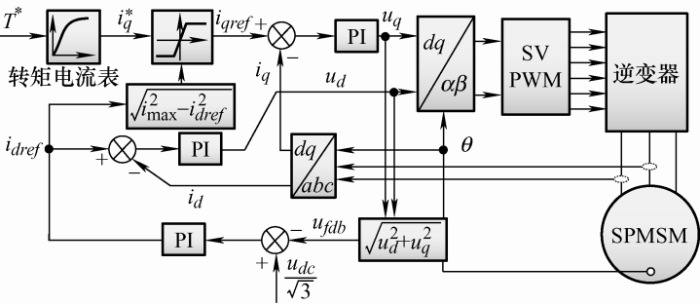
本文所提带深度前馈的改进型反馈式弱磁控制策略,如图10 所示,根据转矩指令可以查表获得q 轴电流指令,相比于前馈弱磁和反馈式弱磁策略,d 轴电流指令有前馈分量和反馈分量两部分构成。
图10
根据转速和直流电压结合标定数据表得到直轴弱磁电流的基础值idref_ff ,该数据表仅需对应电机外特性曲线固定转速间隔下的数据点,以300 r/min间隔为例,本文研究对象基速约为1 400 r/min,最高转速为4 500 r/min,则需要标定测试的数据量点不超过12,而在第3.1节中的开环标定策略下,以20%最大转矩间隔进行标定为例,则至少需要30个点的数据,可节省标定测试时间和程序存储空间。
电压闭环的参考输入为${{{V_{dc}}} \mathord{\left/ {\vphantom {{{V_{dc}}} {\sqrt 3 }}} \right. } {\sqrt 3 }}$,反馈为dq 电压指令平方和的方均根值,由于实际应用时,考虑到逆变器的电压损失和电流的波动,应预留一定的调节裕量,经过PI或P调节器,得到反馈分量。
前馈分量和反馈分量两部分相加得到实际需要的弱磁电流指令值,在急加速和急减速的过程中,可以始终保持电机的端电压在电压极限圆内,保持电机工作在MTPV模式下的最优弱磁电流值。电流数据表数据量大大减小,可显著提升工程开发效率,减小对控制器处理芯片存储资源的占用。相比于反馈式弱磁对闭环调节参数的敏感性,由于改进型反馈式弱磁策略在动态调节过程中始终具有深度前馈分量,不易产生端电压超出电压极限圆的情况,因而对电压闭环的响应速度要求并不高,弱磁控制失效概率也大大降低,系统的可靠性得到提升。
4 仿真分析
基于Matlab/Simulink平台建立了永磁同步电机系统的仿真模型,仿真分析不同弱磁控制策略下永磁电机转速响应,电机参数如表1 所示。负载转矩为50 N·m。在1 s时,转速指令从2 100 r/min突变到4 200 r/min。
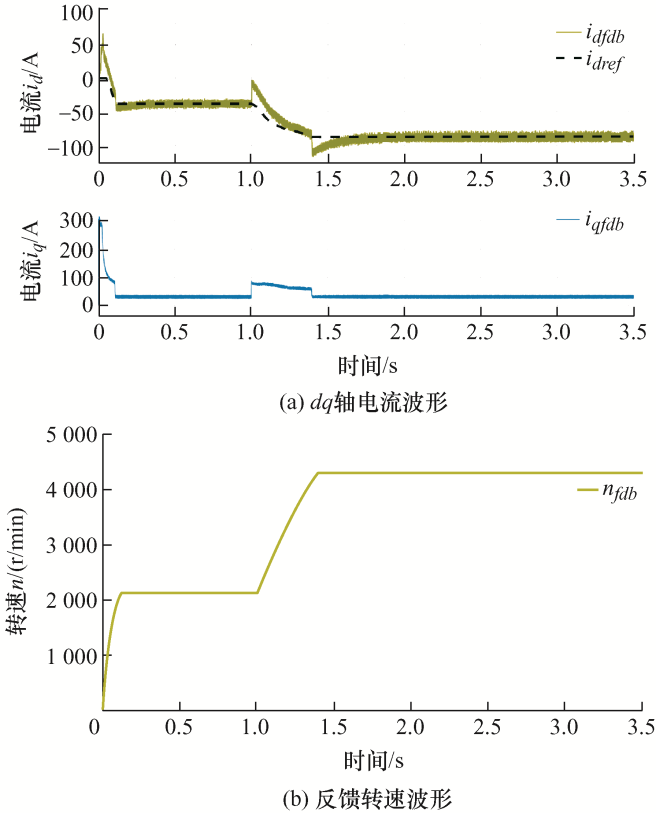
4.1 前馈弱磁仿真
在前馈弱磁控制策略下,永磁电机dq 轴电流和反馈转速波形如图11 所示。从图11 a中可以看出在2 100 r/min稳态下,弱磁电流为-40 A,转矩电流为25 A,4 200 r/min稳态时,弱磁电流为-85 A,转矩电流为25 A。从图11 b中可以看出,实际转速从2 100 r/min到4 200 r/min的响应时间为400 ms。
图11
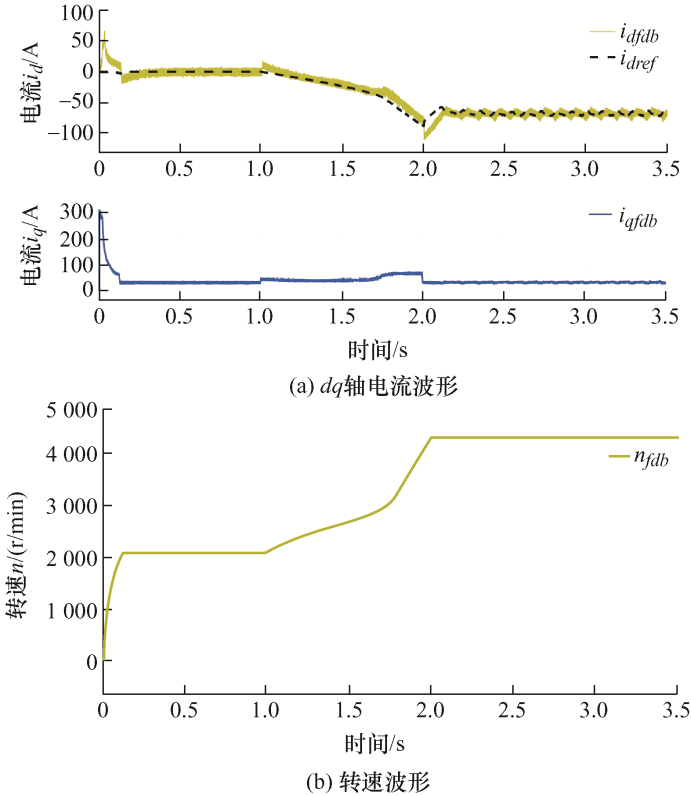
4.2 反馈式弱磁
在反馈式弱磁控制策略下,永磁电机dq 轴电流和反馈转速波形如图12 所示。从图12 a中可以看出在2 100 r/min稳态下,弱磁电流为0 A,转矩电流为25 A,4 200 r/min稳态时,弱磁电流为-65 A,转矩电流为25 A。从图12 b中可以看出实际转速从2 100 r/min到4 200 r/min的响应时间为1 s。
图12
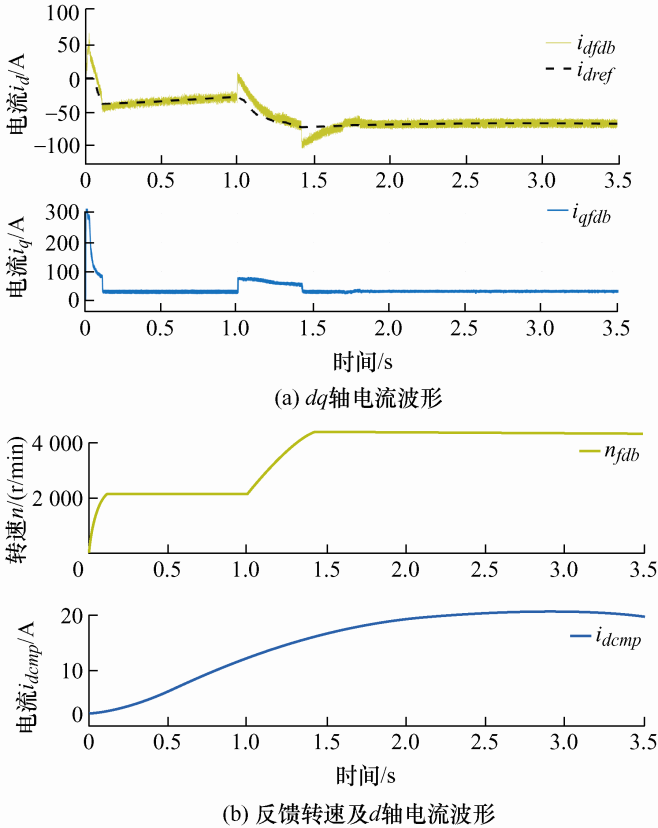
4.3 改进型反馈式弱磁
在改进的反馈式弱磁控制策略下,永磁电机dq 轴电流和反馈转速波形如图13 所示。从图13 a中可以看出在2 100 r/min稳态下,弱磁电流为-30 A,转矩电流为25 A,4 200 r/min稳态时,弱磁电流为-65 A,转矩电流为25 A。从图13 b中可以看出,实际转速从2 100 r/min到4 200 r/min的响应时间为400 ms,idref_fb 在4 200 r/min下 为20 A。
图13
前馈弱磁控制策略的转速响应速度快于反馈式弱磁控制策略,但弱磁电流偏大,影响电机的发热。而改进的反馈式弱磁控制策略具有转矩响应快、弱磁电流小和效率高的优点。
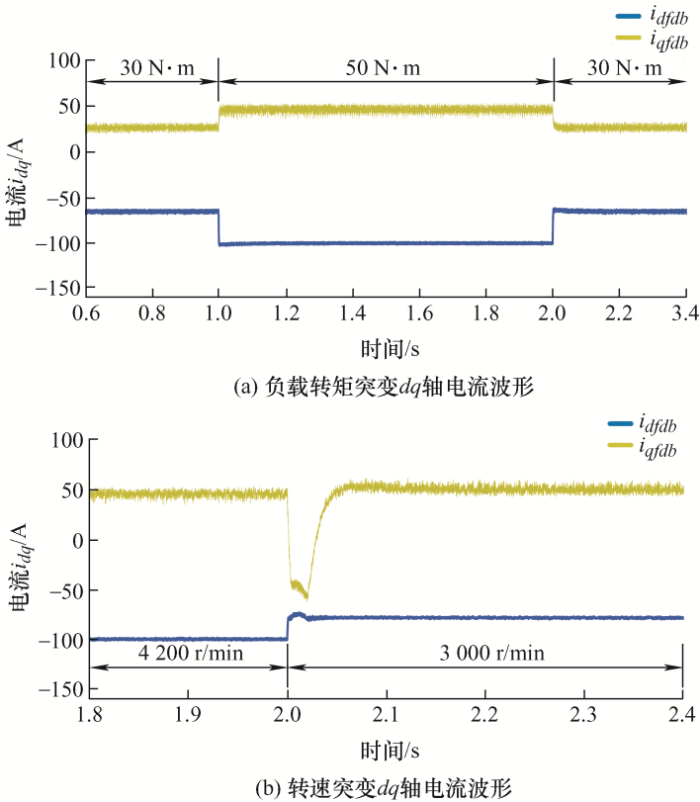
为进一步验证所提策略的性能,分别对实际工作过程中出现频率最高的转速和转矩突变的工况进行仿真,如图14 a所示,保持转速恒定为4 200 r/min,负载转矩由30 N·m突加至50 N·m,dq 电流跟踪迅速无超调,稳态后电流波动较小。图14 a为负载恒定为50 N·m转速4 200 r/min降至3 000 r/min,在转速突变时,反馈分量首先发生作用,d 轴电流快速增大,然后反馈调节开始产生调节分量,缓慢降至一最优的较小d 轴电流值,该过程与前述分析较为吻合。由此可见,所提改进式反馈弱磁策略在不同负载和转速工况下dq 轴电流的动稳态性能均较好。
图14
5 结论
针对分布式电驱动系统,本文分析了永磁电机三种弱磁控制方法的优缺点,提出一种改进型反馈式弱磁控制策略,通过稳定性分析和仿真分析得到如下的主要结论。
(1) 前馈弱磁法具有响应速度快、可靠性高的优点,缺点是标定过程繁琐,表格占用过多资源,空载时弱磁电流大,并且在电机参数变化时,该方法的鲁棒性差。
(2) 反馈式弱磁控制方法具有不依赖于电机参数、简单可靠的优点;反馈式弱磁由于电压调节器的原因,使得弱磁电流响应速度慢。
(3) 提出改进型反馈式弱磁控制策略,通过查表得到弱磁电流基础值,确保了弱磁电流的响应速度,同时通过反馈式弱磁方法产生弱磁电流补偿值,使得电机端电压维持在电压极限圆上,降低了空载时的弱磁电流,提高了参数鲁棒性。该方法尤其适合转速和负载多变的车用分布式电驱动系统领域。
参考文献
View Option
[1]
邹波 , 谭坤 , 杨刚 , 等 . 特种系统多轮分布式电驱动系统设计研究
[J]. 系统与动力技术 , 2017 (4 ):1 -6 .
[本文引用: 1]
ZOU Bo TAN Kun YANG Gang , et al . Research on distributed multi-wheel electric- drive system design for a special vehicle
[J]. Vehicle & Power Technology , 2017 (4 ):1 -6 .
[本文引用: 1]
[2]
林程 , 徐志峰 , 张虹 , 等 . 分布式电驱动汽车驱动力矩优化控制分配
[J]. 北京理工大学学报 , 2016 , 36 (7 ):668 -672 .
[本文引用: 1]
LIN Cheng XU Zhifeng ZHANG Hong , et al . Research on driving torque control strategy for distributed drive electric vehicle
[J]. Transactions of Beijing Institute of Technology , 2016 , 36 (7 ):668 -672 .
[本文引用: 1]
[3]
FODOREAN D SARRAZIN M M CLAUDIA STELUTA M , et al . Electromagnetic and structural analysis for a surface-mounted PMSM used for light-EV
[J]. IEEE Transactions on Industry Applications , 2016 , 52 (4 ):2892 -2899 .
DOI:10.1109/TIA.2016.2537784
URL
[本文引用: 1]
[4]
CHEN Y Z FANG Y T HUANG X Y , et al . Torque and flux weakening control with MTPV for interior permanent magnet synchronous motor
[C]// 2016 IEEE Vehicle Power & Propulsion Conference,17-20 Oct. 2016,Hangzhou, China. IEEE , 2016 :1 -5 . DOI: 10.1109/VPPC.2016.7791804 .
[本文引用: 2]
[5]
KWON T S SUL S K . Novel antiwindup of a current regulator of a surface-mounted permanent-magnet motor for flux-weakening control
[J]. IEEE Transactions on Industry Applications , 2006 , 42 (5 ):1293 -1300 .
DOI:10.1109/TIA.2006.880836
URL
[本文引用: 1]
[6]
KWON T S CHOI G Y KWAK M S , et al . Novel flux-weakening control of an IPMSM for quasi-six-step operation
[J]. IEEE Transactions on Industry Applications , 2008 , 44 (6 ):1722 -1731 .
DOI:10.1109/TIA.2008.2006305
URL
[本文引用: 1]
[7]
MIGUEL-ESPINAR C HEREDERO-PERIS D GROSS G , et al . Maximum torque per voltage flux-weakening strategy with speed limiter for PMSM drives
[J]. IEEE Transactions on Industrial Electronics , 2021 :9254 -9264 .
[本文引用: 1]
[8]
WANG C ZHU Z Q . Fuzzy logic speed control of permanent magnet synchronous machine and feedback voltage ripple reduction in flux-weakening operation region
[J]. IEEE Transactions on Industry Applications , 2020 , 56 (99 ):1505 -1517 .
DOI:10.1109/TIA.28
URL
[本文引用: 1]
[9]
BEDETTI N CALLIGARO S PETRELLA R . Analytical design and autotuning of adaptive flux-weakening voltage regulation loop in IPMSM drives with accurate torque regulation
[J]. IEEE Transactions on Industry Applications , 2020 , 56 (1 ):301 -313 .
DOI:10.1109/TIA.28
URL
[本文引用: 1]
[10]
窦汝振 , 温旭辉 . 永磁同步电动机直接转矩控制的弱磁运行分析
[J]. 中国电机工程学报 , 2005 (12 ):117 -121 .
[本文引用: 1]
DOU Ruzhen WEN Xuhui . Analysis of field weakening operation for the direct torque control of PMSM
[J]. Proceedings of the CSEE , 2005 (12 ):117 -121 .
[本文引用: 1]
[11]
赵其进 , 廖自力 , 苗成林 , 等 . 电传动系统轮毂电机恒转矩弱磁控制策略
[J]. 浙江大学学报 , 2021 , 55 (1 ):195 -202 .
[本文引用: 1]
ZHAO Qijin LIAO Zili MIAO Chenglin , et al . Constant torque flux-weakening control strategy of hub motor for electric drive vehicle
[J]. Journal of Zhejiang University , 2021 , 55 (1 ):195 -202 .
[本文引用: 1]
[12]
盛义发 , 喻寿益 , 桂卫华 , 等 . 轨道系统用永磁同步电机系统弱磁控制策略
[J]. 中国电机工程学报 , 2010 , 30 (9 ):74 -79 .
[本文引用: 1]
SHENG Yifa YU Shouyi GUI Weihua , et al . Field weakening operation control strategies of permanent magnet synchronous motor for railway vehicles
[J]. Proceedings of the CSEE , 2010 , 30 (9 ):74 -79 .
[本文引用: 1]
[13]
王贺超 , 夏长亮 , 阎彦 , 等 . 基于谐振控制的表贴式永磁同步电机弱磁区电流谐波抑制
[J]. 电工技术学报 , 2014 , 29 (9 ):83 -91 .
[本文引用: 1]
WANG Hechao XIA Changliang YAN Yan , et al . Research on the control strategy of IPMSM for the flux weakening operation
[J]. Transactions of China Electrotechnical Society , 2014 , 29 (9 ):83 -91 .
[本文引用: 1]
特种系统多轮分布式电驱动系统设计研究
1
2017
... 分布式电驱动系统主要结构特征是将驱动电机直接安装在驱动轮内或者驱动轮附近,具有驱动传动链短、传动效率高、结构紧凑等突出优点.电动机既是汽车信息单元,同样也是快速反应的控制执行单元,通过独立控制电动机驱/制动转矩容易实现多种动力学控制功能[1 ,2 ] .随着电动汽车行业的发展和电驱动系统的成熟,分布式驱动方式在部分高端车型上和特种车辆中已开始得到应用,是未来电动汽车电驱动系统重要的发展方向之一.由于实际应用工况存在的安装空间狭窄和动力传输路径独立的特点,对电驱动系统的轻量化和控制精度提出了更高的要求.表贴式永磁同步电机(Surface-mounted permanent magnet synchronous motors, SPMSM)以其结构简单、运行可靠、效率高、控制精度高等诸多优点广泛应用于电动汽车中[3 ,4 ] .在分布式电驱动系统中,除了需要具备较宽的调速范围,以适应快速启动、加速、低速爬坡等要求以外,对转矩控制精度和不同电机的一致性要求也显著高于传统集中式驱动系统.弱磁控制是拓宽电机运行转速范围的有效手段,并且由于弱磁同时受到转速、直流电压和负载三方面的影响,需要兼顾到动态响应和转矩控制精度方面的要求,因此,对永磁同步电机弱磁控制方法进行研究具有重要意义. ...
特种系统多轮分布式电驱动系统设计研究
1
2017
... 分布式电驱动系统主要结构特征是将驱动电机直接安装在驱动轮内或者驱动轮附近,具有驱动传动链短、传动效率高、结构紧凑等突出优点.电动机既是汽车信息单元,同样也是快速反应的控制执行单元,通过独立控制电动机驱/制动转矩容易实现多种动力学控制功能[1 ,2 ] .随着电动汽车行业的发展和电驱动系统的成熟,分布式驱动方式在部分高端车型上和特种车辆中已开始得到应用,是未来电动汽车电驱动系统重要的发展方向之一.由于实际应用工况存在的安装空间狭窄和动力传输路径独立的特点,对电驱动系统的轻量化和控制精度提出了更高的要求.表贴式永磁同步电机(Surface-mounted permanent magnet synchronous motors, SPMSM)以其结构简单、运行可靠、效率高、控制精度高等诸多优点广泛应用于电动汽车中[3 ,4 ] .在分布式电驱动系统中,除了需要具备较宽的调速范围,以适应快速启动、加速、低速爬坡等要求以外,对转矩控制精度和不同电机的一致性要求也显著高于传统集中式驱动系统.弱磁控制是拓宽电机运行转速范围的有效手段,并且由于弱磁同时受到转速、直流电压和负载三方面的影响,需要兼顾到动态响应和转矩控制精度方面的要求,因此,对永磁同步电机弱磁控制方法进行研究具有重要意义. ...
分布式电驱动汽车驱动力矩优化控制分配
1
2016
... 分布式电驱动系统主要结构特征是将驱动电机直接安装在驱动轮内或者驱动轮附近,具有驱动传动链短、传动效率高、结构紧凑等突出优点.电动机既是汽车信息单元,同样也是快速反应的控制执行单元,通过独立控制电动机驱/制动转矩容易实现多种动力学控制功能[1 ,2 ] .随着电动汽车行业的发展和电驱动系统的成熟,分布式驱动方式在部分高端车型上和特种车辆中已开始得到应用,是未来电动汽车电驱动系统重要的发展方向之一.由于实际应用工况存在的安装空间狭窄和动力传输路径独立的特点,对电驱动系统的轻量化和控制精度提出了更高的要求.表贴式永磁同步电机(Surface-mounted permanent magnet synchronous motors, SPMSM)以其结构简单、运行可靠、效率高、控制精度高等诸多优点广泛应用于电动汽车中[3 ,4 ] .在分布式电驱动系统中,除了需要具备较宽的调速范围,以适应快速启动、加速、低速爬坡等要求以外,对转矩控制精度和不同电机的一致性要求也显著高于传统集中式驱动系统.弱磁控制是拓宽电机运行转速范围的有效手段,并且由于弱磁同时受到转速、直流电压和负载三方面的影响,需要兼顾到动态响应和转矩控制精度方面的要求,因此,对永磁同步电机弱磁控制方法进行研究具有重要意义. ...
分布式电驱动汽车驱动力矩优化控制分配
1
2016
... 分布式电驱动系统主要结构特征是将驱动电机直接安装在驱动轮内或者驱动轮附近,具有驱动传动链短、传动效率高、结构紧凑等突出优点.电动机既是汽车信息单元,同样也是快速反应的控制执行单元,通过独立控制电动机驱/制动转矩容易实现多种动力学控制功能[1 ,2 ] .随着电动汽车行业的发展和电驱动系统的成熟,分布式驱动方式在部分高端车型上和特种车辆中已开始得到应用,是未来电动汽车电驱动系统重要的发展方向之一.由于实际应用工况存在的安装空间狭窄和动力传输路径独立的特点,对电驱动系统的轻量化和控制精度提出了更高的要求.表贴式永磁同步电机(Surface-mounted permanent magnet synchronous motors, SPMSM)以其结构简单、运行可靠、效率高、控制精度高等诸多优点广泛应用于电动汽车中[3 ,4 ] .在分布式电驱动系统中,除了需要具备较宽的调速范围,以适应快速启动、加速、低速爬坡等要求以外,对转矩控制精度和不同电机的一致性要求也显著高于传统集中式驱动系统.弱磁控制是拓宽电机运行转速范围的有效手段,并且由于弱磁同时受到转速、直流电压和负载三方面的影响,需要兼顾到动态响应和转矩控制精度方面的要求,因此,对永磁同步电机弱磁控制方法进行研究具有重要意义. ...
Electromagnetic and structural analysis for a surface-mounted PMSM used for light-EV
1
2016
... 分布式电驱动系统主要结构特征是将驱动电机直接安装在驱动轮内或者驱动轮附近,具有驱动传动链短、传动效率高、结构紧凑等突出优点.电动机既是汽车信息单元,同样也是快速反应的控制执行单元,通过独立控制电动机驱/制动转矩容易实现多种动力学控制功能[1 ,2 ] .随着电动汽车行业的发展和电驱动系统的成熟,分布式驱动方式在部分高端车型上和特种车辆中已开始得到应用,是未来电动汽车电驱动系统重要的发展方向之一.由于实际应用工况存在的安装空间狭窄和动力传输路径独立的特点,对电驱动系统的轻量化和控制精度提出了更高的要求.表贴式永磁同步电机(Surface-mounted permanent magnet synchronous motors, SPMSM)以其结构简单、运行可靠、效率高、控制精度高等诸多优点广泛应用于电动汽车中[3 ,4 ] .在分布式电驱动系统中,除了需要具备较宽的调速范围,以适应快速启动、加速、低速爬坡等要求以外,对转矩控制精度和不同电机的一致性要求也显著高于传统集中式驱动系统.弱磁控制是拓宽电机运行转速范围的有效手段,并且由于弱磁同时受到转速、直流电压和负载三方面的影响,需要兼顾到动态响应和转矩控制精度方面的要求,因此,对永磁同步电机弱磁控制方法进行研究具有重要意义. ...
Torque and flux weakening control with MTPV for interior permanent magnet synchronous motor
2
2016
... 分布式电驱动系统主要结构特征是将驱动电机直接安装在驱动轮内或者驱动轮附近,具有驱动传动链短、传动效率高、结构紧凑等突出优点.电动机既是汽车信息单元,同样也是快速反应的控制执行单元,通过独立控制电动机驱/制动转矩容易实现多种动力学控制功能[1 ,2 ] .随着电动汽车行业的发展和电驱动系统的成熟,分布式驱动方式在部分高端车型上和特种车辆中已开始得到应用,是未来电动汽车电驱动系统重要的发展方向之一.由于实际应用工况存在的安装空间狭窄和动力传输路径独立的特点,对电驱动系统的轻量化和控制精度提出了更高的要求.表贴式永磁同步电机(Surface-mounted permanent magnet synchronous motors, SPMSM)以其结构简单、运行可靠、效率高、控制精度高等诸多优点广泛应用于电动汽车中[3 ,4 ] .在分布式电驱动系统中,除了需要具备较宽的调速范围,以适应快速启动、加速、低速爬坡等要求以外,对转矩控制精度和不同电机的一致性要求也显著高于传统集中式驱动系统.弱磁控制是拓宽电机运行转速范围的有效手段,并且由于弱磁同时受到转速、直流电压和负载三方面的影响,需要兼顾到动态响应和转矩控制精度方面的要求,因此,对永磁同步电机弱磁控制方法进行研究具有重要意义. ...
... 目前已有许多弱磁控制方法被提出,按照电流指令的获取方法主要可分为前馈弱磁法、反馈弱磁和混合弱磁法.前馈弱磁法需要依赖电机参数,一般通过离线标定和查表来实现,该方法具有较好的稳定性和较快的响应,但对电机参数的敏感性使得该方法的鲁棒性较差,当电机参数或者逆变器电压发生变化时,使得电机输出性能会下降.反馈弱磁法主要利用电压调节器实现d 轴电流自动调节.混合弱磁法则同时具备反馈调节单元和前馈调节单元,可以结合两种方法的优点,兼顾动态响应能力和鲁棒性要求.文献[4 ]利用极坐标方法实现了最大转矩电流比和弱磁算法的统一.文献[5 ,6 ]针对弱磁区存在的调节器饱和与电压限制方面的研究并给出解决方法.文献[7 ]给出一种具备自动弱磁功能的限速控制方法.文献[8 ]通过模糊逻辑速度控制策略解决了弱磁区的电流脉动问题.文献[9 ]提出一种自适应电压环,可在保证转矩控制精度的同时实现自动弱磁调节.文献[10 ]分析了直接转矩控制模式下负载角对弱磁性能的影响.文献[11 ]设计了转矩观测器,提升了车用轮毂电机在弱磁区的转矩控制精度.文献[12 ]提出一种混合弱磁策略,在MTPA前馈分量基础上叠加电压闭环反馈分量.文献[13 ]采用谐振控制策略对弱磁区的谐波进行抑制.综上,当前针对弱磁控制研究的热点主要集中在弱磁区电压利用率、弱磁区控制非线性控制及系统稳定性、弱磁区的平滑过渡和弱磁区的转矩响应能力等方面.本文针对分布式电驱动系统的轮毂电机应用场合,提出一种易于工程化并且能够兼容动态响应和稳态性能的改进型反馈式弱磁控制策略. ...
Novel antiwindup of a current regulator of a surface-mounted permanent-magnet motor for flux-weakening control
1
2006
... 目前已有许多弱磁控制方法被提出,按照电流指令的获取方法主要可分为前馈弱磁法、反馈弱磁和混合弱磁法.前馈弱磁法需要依赖电机参数,一般通过离线标定和查表来实现,该方法具有较好的稳定性和较快的响应,但对电机参数的敏感性使得该方法的鲁棒性较差,当电机参数或者逆变器电压发生变化时,使得电机输出性能会下降.反馈弱磁法主要利用电压调节器实现d 轴电流自动调节.混合弱磁法则同时具备反馈调节单元和前馈调节单元,可以结合两种方法的优点,兼顾动态响应能力和鲁棒性要求.文献[4 ]利用极坐标方法实现了最大转矩电流比和弱磁算法的统一.文献[5 ,6 ]针对弱磁区存在的调节器饱和与电压限制方面的研究并给出解决方法.文献[7 ]给出一种具备自动弱磁功能的限速控制方法.文献[8 ]通过模糊逻辑速度控制策略解决了弱磁区的电流脉动问题.文献[9 ]提出一种自适应电压环,可在保证转矩控制精度的同时实现自动弱磁调节.文献[10 ]分析了直接转矩控制模式下负载角对弱磁性能的影响.文献[11 ]设计了转矩观测器,提升了车用轮毂电机在弱磁区的转矩控制精度.文献[12 ]提出一种混合弱磁策略,在MTPA前馈分量基础上叠加电压闭环反馈分量.文献[13 ]采用谐振控制策略对弱磁区的谐波进行抑制.综上,当前针对弱磁控制研究的热点主要集中在弱磁区电压利用率、弱磁区控制非线性控制及系统稳定性、弱磁区的平滑过渡和弱磁区的转矩响应能力等方面.本文针对分布式电驱动系统的轮毂电机应用场合,提出一种易于工程化并且能够兼容动态响应和稳态性能的改进型反馈式弱磁控制策略. ...
Novel flux-weakening control of an IPMSM for quasi-six-step operation
1
2008
... 目前已有许多弱磁控制方法被提出,按照电流指令的获取方法主要可分为前馈弱磁法、反馈弱磁和混合弱磁法.前馈弱磁法需要依赖电机参数,一般通过离线标定和查表来实现,该方法具有较好的稳定性和较快的响应,但对电机参数的敏感性使得该方法的鲁棒性较差,当电机参数或者逆变器电压发生变化时,使得电机输出性能会下降.反馈弱磁法主要利用电压调节器实现d 轴电流自动调节.混合弱磁法则同时具备反馈调节单元和前馈调节单元,可以结合两种方法的优点,兼顾动态响应能力和鲁棒性要求.文献[4 ]利用极坐标方法实现了最大转矩电流比和弱磁算法的统一.文献[5 ,6 ]针对弱磁区存在的调节器饱和与电压限制方面的研究并给出解决方法.文献[7 ]给出一种具备自动弱磁功能的限速控制方法.文献[8 ]通过模糊逻辑速度控制策略解决了弱磁区的电流脉动问题.文献[9 ]提出一种自适应电压环,可在保证转矩控制精度的同时实现自动弱磁调节.文献[10 ]分析了直接转矩控制模式下负载角对弱磁性能的影响.文献[11 ]设计了转矩观测器,提升了车用轮毂电机在弱磁区的转矩控制精度.文献[12 ]提出一种混合弱磁策略,在MTPA前馈分量基础上叠加电压闭环反馈分量.文献[13 ]采用谐振控制策略对弱磁区的谐波进行抑制.综上,当前针对弱磁控制研究的热点主要集中在弱磁区电压利用率、弱磁区控制非线性控制及系统稳定性、弱磁区的平滑过渡和弱磁区的转矩响应能力等方面.本文针对分布式电驱动系统的轮毂电机应用场合,提出一种易于工程化并且能够兼容动态响应和稳态性能的改进型反馈式弱磁控制策略. ...
Maximum torque per voltage flux-weakening strategy with speed limiter for PMSM drives
1
2021
... 目前已有许多弱磁控制方法被提出,按照电流指令的获取方法主要可分为前馈弱磁法、反馈弱磁和混合弱磁法.前馈弱磁法需要依赖电机参数,一般通过离线标定和查表来实现,该方法具有较好的稳定性和较快的响应,但对电机参数的敏感性使得该方法的鲁棒性较差,当电机参数或者逆变器电压发生变化时,使得电机输出性能会下降.反馈弱磁法主要利用电压调节器实现d 轴电流自动调节.混合弱磁法则同时具备反馈调节单元和前馈调节单元,可以结合两种方法的优点,兼顾动态响应能力和鲁棒性要求.文献[4 ]利用极坐标方法实现了最大转矩电流比和弱磁算法的统一.文献[5 ,6 ]针对弱磁区存在的调节器饱和与电压限制方面的研究并给出解决方法.文献[7 ]给出一种具备自动弱磁功能的限速控制方法.文献[8 ]通过模糊逻辑速度控制策略解决了弱磁区的电流脉动问题.文献[9 ]提出一种自适应电压环,可在保证转矩控制精度的同时实现自动弱磁调节.文献[10 ]分析了直接转矩控制模式下负载角对弱磁性能的影响.文献[11 ]设计了转矩观测器,提升了车用轮毂电机在弱磁区的转矩控制精度.文献[12 ]提出一种混合弱磁策略,在MTPA前馈分量基础上叠加电压闭环反馈分量.文献[13 ]采用谐振控制策略对弱磁区的谐波进行抑制.综上,当前针对弱磁控制研究的热点主要集中在弱磁区电压利用率、弱磁区控制非线性控制及系统稳定性、弱磁区的平滑过渡和弱磁区的转矩响应能力等方面.本文针对分布式电驱动系统的轮毂电机应用场合,提出一种易于工程化并且能够兼容动态响应和稳态性能的改进型反馈式弱磁控制策略. ...
Fuzzy logic speed control of permanent magnet synchronous machine and feedback voltage ripple reduction in flux-weakening operation region
1
2020
... 目前已有许多弱磁控制方法被提出,按照电流指令的获取方法主要可分为前馈弱磁法、反馈弱磁和混合弱磁法.前馈弱磁法需要依赖电机参数,一般通过离线标定和查表来实现,该方法具有较好的稳定性和较快的响应,但对电机参数的敏感性使得该方法的鲁棒性较差,当电机参数或者逆变器电压发生变化时,使得电机输出性能会下降.反馈弱磁法主要利用电压调节器实现d 轴电流自动调节.混合弱磁法则同时具备反馈调节单元和前馈调节单元,可以结合两种方法的优点,兼顾动态响应能力和鲁棒性要求.文献[4 ]利用极坐标方法实现了最大转矩电流比和弱磁算法的统一.文献[5 ,6 ]针对弱磁区存在的调节器饱和与电压限制方面的研究并给出解决方法.文献[7 ]给出一种具备自动弱磁功能的限速控制方法.文献[8 ]通过模糊逻辑速度控制策略解决了弱磁区的电流脉动问题.文献[9 ]提出一种自适应电压环,可在保证转矩控制精度的同时实现自动弱磁调节.文献[10 ]分析了直接转矩控制模式下负载角对弱磁性能的影响.文献[11 ]设计了转矩观测器,提升了车用轮毂电机在弱磁区的转矩控制精度.文献[12 ]提出一种混合弱磁策略,在MTPA前馈分量基础上叠加电压闭环反馈分量.文献[13 ]采用谐振控制策略对弱磁区的谐波进行抑制.综上,当前针对弱磁控制研究的热点主要集中在弱磁区电压利用率、弱磁区控制非线性控制及系统稳定性、弱磁区的平滑过渡和弱磁区的转矩响应能力等方面.本文针对分布式电驱动系统的轮毂电机应用场合,提出一种易于工程化并且能够兼容动态响应和稳态性能的改进型反馈式弱磁控制策略. ...
Analytical design and autotuning of adaptive flux-weakening voltage regulation loop in IPMSM drives with accurate torque regulation
1
2020
... 目前已有许多弱磁控制方法被提出,按照电流指令的获取方法主要可分为前馈弱磁法、反馈弱磁和混合弱磁法.前馈弱磁法需要依赖电机参数,一般通过离线标定和查表来实现,该方法具有较好的稳定性和较快的响应,但对电机参数的敏感性使得该方法的鲁棒性较差,当电机参数或者逆变器电压发生变化时,使得电机输出性能会下降.反馈弱磁法主要利用电压调节器实现d 轴电流自动调节.混合弱磁法则同时具备反馈调节单元和前馈调节单元,可以结合两种方法的优点,兼顾动态响应能力和鲁棒性要求.文献[4 ]利用极坐标方法实现了最大转矩电流比和弱磁算法的统一.文献[5 ,6 ]针对弱磁区存在的调节器饱和与电压限制方面的研究并给出解决方法.文献[7 ]给出一种具备自动弱磁功能的限速控制方法.文献[8 ]通过模糊逻辑速度控制策略解决了弱磁区的电流脉动问题.文献[9 ]提出一种自适应电压环,可在保证转矩控制精度的同时实现自动弱磁调节.文献[10 ]分析了直接转矩控制模式下负载角对弱磁性能的影响.文献[11 ]设计了转矩观测器,提升了车用轮毂电机在弱磁区的转矩控制精度.文献[12 ]提出一种混合弱磁策略,在MTPA前馈分量基础上叠加电压闭环反馈分量.文献[13 ]采用谐振控制策略对弱磁区的谐波进行抑制.综上,当前针对弱磁控制研究的热点主要集中在弱磁区电压利用率、弱磁区控制非线性控制及系统稳定性、弱磁区的平滑过渡和弱磁区的转矩响应能力等方面.本文针对分布式电驱动系统的轮毂电机应用场合,提出一种易于工程化并且能够兼容动态响应和稳态性能的改进型反馈式弱磁控制策略. ...
永磁同步电动机直接转矩控制的弱磁运行分析
1
2005
... 目前已有许多弱磁控制方法被提出,按照电流指令的获取方法主要可分为前馈弱磁法、反馈弱磁和混合弱磁法.前馈弱磁法需要依赖电机参数,一般通过离线标定和查表来实现,该方法具有较好的稳定性和较快的响应,但对电机参数的敏感性使得该方法的鲁棒性较差,当电机参数或者逆变器电压发生变化时,使得电机输出性能会下降.反馈弱磁法主要利用电压调节器实现d 轴电流自动调节.混合弱磁法则同时具备反馈调节单元和前馈调节单元,可以结合两种方法的优点,兼顾动态响应能力和鲁棒性要求.文献[4 ]利用极坐标方法实现了最大转矩电流比和弱磁算法的统一.文献[5 ,6 ]针对弱磁区存在的调节器饱和与电压限制方面的研究并给出解决方法.文献[7 ]给出一种具备自动弱磁功能的限速控制方法.文献[8 ]通过模糊逻辑速度控制策略解决了弱磁区的电流脉动问题.文献[9 ]提出一种自适应电压环,可在保证转矩控制精度的同时实现自动弱磁调节.文献[10 ]分析了直接转矩控制模式下负载角对弱磁性能的影响.文献[11 ]设计了转矩观测器,提升了车用轮毂电机在弱磁区的转矩控制精度.文献[12 ]提出一种混合弱磁策略,在MTPA前馈分量基础上叠加电压闭环反馈分量.文献[13 ]采用谐振控制策略对弱磁区的谐波进行抑制.综上,当前针对弱磁控制研究的热点主要集中在弱磁区电压利用率、弱磁区控制非线性控制及系统稳定性、弱磁区的平滑过渡和弱磁区的转矩响应能力等方面.本文针对分布式电驱动系统的轮毂电机应用场合,提出一种易于工程化并且能够兼容动态响应和稳态性能的改进型反馈式弱磁控制策略. ...
永磁同步电动机直接转矩控制的弱磁运行分析
1
2005
... 目前已有许多弱磁控制方法被提出,按照电流指令的获取方法主要可分为前馈弱磁法、反馈弱磁和混合弱磁法.前馈弱磁法需要依赖电机参数,一般通过离线标定和查表来实现,该方法具有较好的稳定性和较快的响应,但对电机参数的敏感性使得该方法的鲁棒性较差,当电机参数或者逆变器电压发生变化时,使得电机输出性能会下降.反馈弱磁法主要利用电压调节器实现d 轴电流自动调节.混合弱磁法则同时具备反馈调节单元和前馈调节单元,可以结合两种方法的优点,兼顾动态响应能力和鲁棒性要求.文献[4 ]利用极坐标方法实现了最大转矩电流比和弱磁算法的统一.文献[5 ,6 ]针对弱磁区存在的调节器饱和与电压限制方面的研究并给出解决方法.文献[7 ]给出一种具备自动弱磁功能的限速控制方法.文献[8 ]通过模糊逻辑速度控制策略解决了弱磁区的电流脉动问题.文献[9 ]提出一种自适应电压环,可在保证转矩控制精度的同时实现自动弱磁调节.文献[10 ]分析了直接转矩控制模式下负载角对弱磁性能的影响.文献[11 ]设计了转矩观测器,提升了车用轮毂电机在弱磁区的转矩控制精度.文献[12 ]提出一种混合弱磁策略,在MTPA前馈分量基础上叠加电压闭环反馈分量.文献[13 ]采用谐振控制策略对弱磁区的谐波进行抑制.综上,当前针对弱磁控制研究的热点主要集中在弱磁区电压利用率、弱磁区控制非线性控制及系统稳定性、弱磁区的平滑过渡和弱磁区的转矩响应能力等方面.本文针对分布式电驱动系统的轮毂电机应用场合,提出一种易于工程化并且能够兼容动态响应和稳态性能的改进型反馈式弱磁控制策略. ...
电传动系统轮毂电机恒转矩弱磁控制策略
1
2021
... 目前已有许多弱磁控制方法被提出,按照电流指令的获取方法主要可分为前馈弱磁法、反馈弱磁和混合弱磁法.前馈弱磁法需要依赖电机参数,一般通过离线标定和查表来实现,该方法具有较好的稳定性和较快的响应,但对电机参数的敏感性使得该方法的鲁棒性较差,当电机参数或者逆变器电压发生变化时,使得电机输出性能会下降.反馈弱磁法主要利用电压调节器实现d 轴电流自动调节.混合弱磁法则同时具备反馈调节单元和前馈调节单元,可以结合两种方法的优点,兼顾动态响应能力和鲁棒性要求.文献[4 ]利用极坐标方法实现了最大转矩电流比和弱磁算法的统一.文献[5 ,6 ]针对弱磁区存在的调节器饱和与电压限制方面的研究并给出解决方法.文献[7 ]给出一种具备自动弱磁功能的限速控制方法.文献[8 ]通过模糊逻辑速度控制策略解决了弱磁区的电流脉动问题.文献[9 ]提出一种自适应电压环,可在保证转矩控制精度的同时实现自动弱磁调节.文献[10 ]分析了直接转矩控制模式下负载角对弱磁性能的影响.文献[11 ]设计了转矩观测器,提升了车用轮毂电机在弱磁区的转矩控制精度.文献[12 ]提出一种混合弱磁策略,在MTPA前馈分量基础上叠加电压闭环反馈分量.文献[13 ]采用谐振控制策略对弱磁区的谐波进行抑制.综上,当前针对弱磁控制研究的热点主要集中在弱磁区电压利用率、弱磁区控制非线性控制及系统稳定性、弱磁区的平滑过渡和弱磁区的转矩响应能力等方面.本文针对分布式电驱动系统的轮毂电机应用场合,提出一种易于工程化并且能够兼容动态响应和稳态性能的改进型反馈式弱磁控制策略. ...
电传动系统轮毂电机恒转矩弱磁控制策略
1
2021
... 目前已有许多弱磁控制方法被提出,按照电流指令的获取方法主要可分为前馈弱磁法、反馈弱磁和混合弱磁法.前馈弱磁法需要依赖电机参数,一般通过离线标定和查表来实现,该方法具有较好的稳定性和较快的响应,但对电机参数的敏感性使得该方法的鲁棒性较差,当电机参数或者逆变器电压发生变化时,使得电机输出性能会下降.反馈弱磁法主要利用电压调节器实现d 轴电流自动调节.混合弱磁法则同时具备反馈调节单元和前馈调节单元,可以结合两种方法的优点,兼顾动态响应能力和鲁棒性要求.文献[4 ]利用极坐标方法实现了最大转矩电流比和弱磁算法的统一.文献[5 ,6 ]针对弱磁区存在的调节器饱和与电压限制方面的研究并给出解决方法.文献[7 ]给出一种具备自动弱磁功能的限速控制方法.文献[8 ]通过模糊逻辑速度控制策略解决了弱磁区的电流脉动问题.文献[9 ]提出一种自适应电压环,可在保证转矩控制精度的同时实现自动弱磁调节.文献[10 ]分析了直接转矩控制模式下负载角对弱磁性能的影响.文献[11 ]设计了转矩观测器,提升了车用轮毂电机在弱磁区的转矩控制精度.文献[12 ]提出一种混合弱磁策略,在MTPA前馈分量基础上叠加电压闭环反馈分量.文献[13 ]采用谐振控制策略对弱磁区的谐波进行抑制.综上,当前针对弱磁控制研究的热点主要集中在弱磁区电压利用率、弱磁区控制非线性控制及系统稳定性、弱磁区的平滑过渡和弱磁区的转矩响应能力等方面.本文针对分布式电驱动系统的轮毂电机应用场合,提出一种易于工程化并且能够兼容动态响应和稳态性能的改进型反馈式弱磁控制策略. ...
轨道系统用永磁同步电机系统弱磁控制策略
1
2010
... 目前已有许多弱磁控制方法被提出,按照电流指令的获取方法主要可分为前馈弱磁法、反馈弱磁和混合弱磁法.前馈弱磁法需要依赖电机参数,一般通过离线标定和查表来实现,该方法具有较好的稳定性和较快的响应,但对电机参数的敏感性使得该方法的鲁棒性较差,当电机参数或者逆变器电压发生变化时,使得电机输出性能会下降.反馈弱磁法主要利用电压调节器实现d 轴电流自动调节.混合弱磁法则同时具备反馈调节单元和前馈调节单元,可以结合两种方法的优点,兼顾动态响应能力和鲁棒性要求.文献[4 ]利用极坐标方法实现了最大转矩电流比和弱磁算法的统一.文献[5 ,6 ]针对弱磁区存在的调节器饱和与电压限制方面的研究并给出解决方法.文献[7 ]给出一种具备自动弱磁功能的限速控制方法.文献[8 ]通过模糊逻辑速度控制策略解决了弱磁区的电流脉动问题.文献[9 ]提出一种自适应电压环,可在保证转矩控制精度的同时实现自动弱磁调节.文献[10 ]分析了直接转矩控制模式下负载角对弱磁性能的影响.文献[11 ]设计了转矩观测器,提升了车用轮毂电机在弱磁区的转矩控制精度.文献[12 ]提出一种混合弱磁策略,在MTPA前馈分量基础上叠加电压闭环反馈分量.文献[13 ]采用谐振控制策略对弱磁区的谐波进行抑制.综上,当前针对弱磁控制研究的热点主要集中在弱磁区电压利用率、弱磁区控制非线性控制及系统稳定性、弱磁区的平滑过渡和弱磁区的转矩响应能力等方面.本文针对分布式电驱动系统的轮毂电机应用场合,提出一种易于工程化并且能够兼容动态响应和稳态性能的改进型反馈式弱磁控制策略. ...
轨道系统用永磁同步电机系统弱磁控制策略
1
2010
... 目前已有许多弱磁控制方法被提出,按照电流指令的获取方法主要可分为前馈弱磁法、反馈弱磁和混合弱磁法.前馈弱磁法需要依赖电机参数,一般通过离线标定和查表来实现,该方法具有较好的稳定性和较快的响应,但对电机参数的敏感性使得该方法的鲁棒性较差,当电机参数或者逆变器电压发生变化时,使得电机输出性能会下降.反馈弱磁法主要利用电压调节器实现d 轴电流自动调节.混合弱磁法则同时具备反馈调节单元和前馈调节单元,可以结合两种方法的优点,兼顾动态响应能力和鲁棒性要求.文献[4 ]利用极坐标方法实现了最大转矩电流比和弱磁算法的统一.文献[5 ,6 ]针对弱磁区存在的调节器饱和与电压限制方面的研究并给出解决方法.文献[7 ]给出一种具备自动弱磁功能的限速控制方法.文献[8 ]通过模糊逻辑速度控制策略解决了弱磁区的电流脉动问题.文献[9 ]提出一种自适应电压环,可在保证转矩控制精度的同时实现自动弱磁调节.文献[10 ]分析了直接转矩控制模式下负载角对弱磁性能的影响.文献[11 ]设计了转矩观测器,提升了车用轮毂电机在弱磁区的转矩控制精度.文献[12 ]提出一种混合弱磁策略,在MTPA前馈分量基础上叠加电压闭环反馈分量.文献[13 ]采用谐振控制策略对弱磁区的谐波进行抑制.综上,当前针对弱磁控制研究的热点主要集中在弱磁区电压利用率、弱磁区控制非线性控制及系统稳定性、弱磁区的平滑过渡和弱磁区的转矩响应能力等方面.本文针对分布式电驱动系统的轮毂电机应用场合,提出一种易于工程化并且能够兼容动态响应和稳态性能的改进型反馈式弱磁控制策略. ...
基于谐振控制的表贴式永磁同步电机弱磁区电流谐波抑制
1
2014
... 目前已有许多弱磁控制方法被提出,按照电流指令的获取方法主要可分为前馈弱磁法、反馈弱磁和混合弱磁法.前馈弱磁法需要依赖电机参数,一般通过离线标定和查表来实现,该方法具有较好的稳定性和较快的响应,但对电机参数的敏感性使得该方法的鲁棒性较差,当电机参数或者逆变器电压发生变化时,使得电机输出性能会下降.反馈弱磁法主要利用电压调节器实现d 轴电流自动调节.混合弱磁法则同时具备反馈调节单元和前馈调节单元,可以结合两种方法的优点,兼顾动态响应能力和鲁棒性要求.文献[4 ]利用极坐标方法实现了最大转矩电流比和弱磁算法的统一.文献[5 ,6 ]针对弱磁区存在的调节器饱和与电压限制方面的研究并给出解决方法.文献[7 ]给出一种具备自动弱磁功能的限速控制方法.文献[8 ]通过模糊逻辑速度控制策略解决了弱磁区的电流脉动问题.文献[9 ]提出一种自适应电压环,可在保证转矩控制精度的同时实现自动弱磁调节.文献[10 ]分析了直接转矩控制模式下负载角对弱磁性能的影响.文献[11 ]设计了转矩观测器,提升了车用轮毂电机在弱磁区的转矩控制精度.文献[12 ]提出一种混合弱磁策略,在MTPA前馈分量基础上叠加电压闭环反馈分量.文献[13 ]采用谐振控制策略对弱磁区的谐波进行抑制.综上,当前针对弱磁控制研究的热点主要集中在弱磁区电压利用率、弱磁区控制非线性控制及系统稳定性、弱磁区的平滑过渡和弱磁区的转矩响应能力等方面.本文针对分布式电驱动系统的轮毂电机应用场合,提出一种易于工程化并且能够兼容动态响应和稳态性能的改进型反馈式弱磁控制策略. ...
基于谐振控制的表贴式永磁同步电机弱磁区电流谐波抑制
1
2014
... 目前已有许多弱磁控制方法被提出,按照电流指令的获取方法主要可分为前馈弱磁法、反馈弱磁和混合弱磁法.前馈弱磁法需要依赖电机参数,一般通过离线标定和查表来实现,该方法具有较好的稳定性和较快的响应,但对电机参数的敏感性使得该方法的鲁棒性较差,当电机参数或者逆变器电压发生变化时,使得电机输出性能会下降.反馈弱磁法主要利用电压调节器实现d 轴电流自动调节.混合弱磁法则同时具备反馈调节单元和前馈调节单元,可以结合两种方法的优点,兼顾动态响应能力和鲁棒性要求.文献[4 ]利用极坐标方法实现了最大转矩电流比和弱磁算法的统一.文献[5 ,6 ]针对弱磁区存在的调节器饱和与电压限制方面的研究并给出解决方法.文献[7 ]给出一种具备自动弱磁功能的限速控制方法.文献[8 ]通过模糊逻辑速度控制策略解决了弱磁区的电流脉动问题.文献[9 ]提出一种自适应电压环,可在保证转矩控制精度的同时实现自动弱磁调节.文献[10 ]分析了直接转矩控制模式下负载角对弱磁性能的影响.文献[11 ]设计了转矩观测器,提升了车用轮毂电机在弱磁区的转矩控制精度.文献[12 ]提出一种混合弱磁策略,在MTPA前馈分量基础上叠加电压闭环反馈分量.文献[13 ]采用谐振控制策略对弱磁区的谐波进行抑制.综上,当前针对弱磁控制研究的热点主要集中在弱磁区电压利用率、弱磁区控制非线性控制及系统稳定性、弱磁区的平滑过渡和弱磁区的转矩响应能力等方面.本文针对分布式电驱动系统的轮毂电机应用场合,提出一种易于工程化并且能够兼容动态响应和稳态性能的改进型反馈式弱磁控制策略. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}