1 引言
永磁同步电机(Permanent magnet synchronous machine,PMSM)由于具有体积小、功率密度高、高转矩惯性比等优点,被广泛应用于交流伺服系统中[1 ] 。永磁同步电机需要使用逆变器作为驱动电路,为了防止逆变器上下桥臂直通,必须加入一段死区时间[2 ] ,此外,开关管存在开启时间和关断时间,开关管和二极管存在管压降,它们统称为“死区效应”[3 ,4 ] 。死区效应会导致输出电压畸变,产生电流谐波,导致电机损耗提升,转矩脉动增大,控制性能降低[5 ,6 ,7 ] 。因此,需要对死区进行补偿。进行死区补偿可以从硬件和软件两个方面进行[8 ] 。
文献[9 ]用硬件检测出实际输出电压,与控制器给定值相比较得出死区导致的电压偏差,然后将偏差与给定值叠加以进行补偿。缺点是需要额外的硬件成本。
软件补偿是利用已有的采样数据,设计各种算法以尽可能消除死区的影响。文献[10 ,11 ]根据PMSM数学模型建立电压误差观测器,实时观测出当前给定电压与应给定电压的误差,建立基于误差电压的PI反馈,将误差电压前馈到给定电压中以进行补偿。但该方法需要已知准确的电机电阻、电感、磁链等参数。文献[12 ,13 ,14 ]建立考虑死区的输出电压模型,通过查表估计的方法来确定补偿电压大小,根据死区对输出电压的影响,在控制器中反向给予电压以进行补偿。但是死区会随工况变化,因此估计的补偿电压不完全准确。文献[15 ]离线测量死区大小与输出电流的关系,根据确定的关系在线调整补偿电压,主要缺点是对每一个逆变器都要进行一轮离线试验。
(1) 建立准确描述死区效应影响的输出电压数学模型。
首先建立逆变器输出电压关于控制器给定电压、死区时间、开关管开启关断时间和管压降的数学模型,在此基础上提出一种基于直轴电压分析的死区补偿方法。利用死区导致的直轴扰动电压的特征,在线辨识死区大小,然后根据数学模型进行前馈电压补偿,以抵消死区的不利影响。
2 死区效应分析
2.1 死区对输出电压的影响
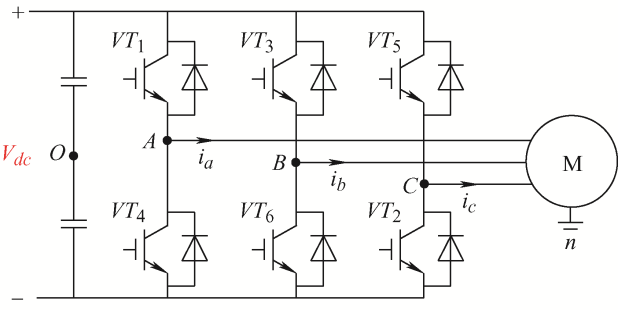
图1 为PMSM电驱动系统示意图,O 为母线电压中点,n 为电机中性点。
图1
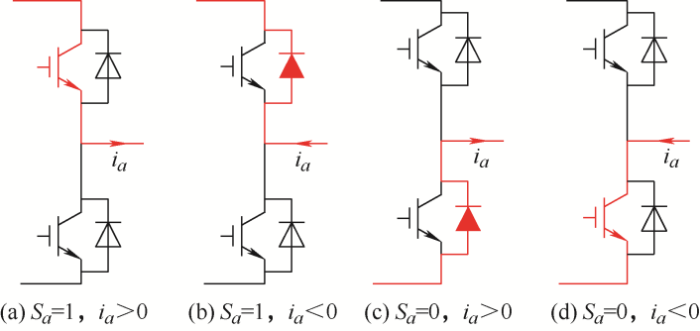
进行公式推导以分析死区效应对输出电压的影响。首先推导管压降的影响:以A相为例,图2 显示出逆变器A相的四种工作状态,规定电流正方向为电源流向负载,规定Sa 表示上下桥臂开通状态,Sa =1表示上桥臂开通,下桥臂关断,Sa =0反之。
图2
考虑开关管和二极管压降,A 点相对于O 点的电压可以归纳如下
(1) $\begin{array}{c}{V_{ao}} = ({V_{dc}} - {V_{ce}} + {V_d})({S_a} - 0.5) - \\0.5({V_{ce}} + {V_d}){\mathop{\rm sgn}} ({i_a})\end{array}$
式中,sgn(ia )为关于ia 的符号函数,当ia >0,sgn(ia )=1;当ia <0,sgn(ia )=0。Vdc 为母线电压,Vce 为开关器件的导通压降,Vd 为续流二极管的导通压降。
(2) $\begin{array}{c}{V_{bo}} = ({V_{dc}} - {V_{ce}} + {V_d})({S_b} - 0.5) - \\ 0.5({V_{ce}} + {V_d}){\mathop{\rm sgn}} ({i_b})\end{array}$
(3) $\begin{array}{c}{V_{co}} = ({V_{dc}} - {V_{ce}} + {V_d})({S_c} - 0.5) - \\ 0.5({V_{ce}} + {V_d}){\mathop{\rm sgn}} ({i_c})\end{array}$
开关管和二极管的导通压降随电流大小变化,可以近似表示为
(4) ${V_{ce}} = {V_{ce0}} + {R_{ce}}\left| {{i_a}} \right|$
(5) ${V_d} = {V_{d0}} + {R_d}\left| {{i_a}} \right|$
式中,Vce 0 与Vd 0 分别为功率器件与续流二极管在电流为0时的压降,Rce 与Rd 为二者的等效电阻,压降随电流增大近似线性上升。
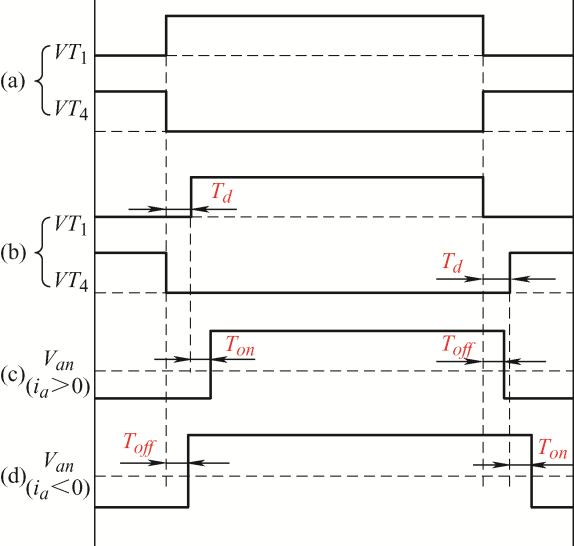
开关管存在上升时间Ton 和下降时间Toff ,如果VT 1 尚未完全关断,VT 4 即导通,将导致上下桥臂直通,进而导致电源短路。为避免这种情况,需要人为加入死区,死区持续时间用Td 表示。Ton 、Toff 和Td 将对输出电压产生的影响如图3 所示。
图3
其中,图3 a为A相上下桥臂的理想触发脉冲,图3 b为加入死区后的触发脉冲,图3 c和图3 d分别为死区和开通、关断延迟时间的影响下,A桥臂实际输出的相电压波形。如图3 所示,在ia >0时,死区时间Td 和开通时间Ton 使输出正电压时间减少,关断时间Toff 使正电压时间增加;ia <0时,死区时间Td 和开通时间Ton 使输出正电压时间增加,关断时间Toff 使正电压时间减少。
设上桥臂的理想导通时间为Ta * ,对比图3 a和图3 c,可以得出死区效应引起的时间误差(比理想时间增加的时间)为
(6) ${T_{er}} = - ({T_d} + {T_{on}} - {T_{off}})$
(7) ${T_{er}} = ({T_d} + {T_{on}} - {T_{off}})$
(8) ${T_{er}} = - {\mathop{\rm sgn}} ({i_a})({T_d} + {T_{on}} - {T_{off}})$
(9) ${T_a} = {T_a}^* - {\mathop{\rm sgn}} ({i_a})({T_d} + {T_{on}} - {T_{off}})$
(10) $M = {T_d} + {T_{on}} - {T_{off}}$
2.2 包含死区的输出电压数学模型
以Ts 表示一个周期时间,改写式(1),则一个周期内Vao 的大小为
(11) $\begin{array}{c}{V_{ao}} = ({V_{dc}} - {V_{ce}} + {V_d})(\frac{{{T_a}}}{{{T_s}}} - 0.5) - \\ 0.5({V_{ce}} + {V_d}){\mathop{\rm sgn}} ({i_a})\end{array}$
(12) $\left\{ \begin{array}{l} {V_{ao}} = {V_{an}} - {V_{no}}\\ {V_{bo}} = {V_{bn}} - {V_{no}}\\ {V_{co}} = {V_{cn}} - {V_{no}}\\ {V_{an}} + {V_{bn}} + {V_{cn}} = 0 \end{array} \right.$
(13) ${V_{no}} = \frac{1}{3}({V_{ao}} + {V_{bo}} + {V_{co}})$
(14) ${V_{an}} = {V_{ao}} + {V_{no}} = \frac{1}{3}({V_{dc}} - {V_{ce}} + {V_d})(\frac{{2{T_a} - {T_b} - {T_c}}}{{{T_s}}}) - \frac{1}{6}({V_{ce}} + {V_d})(2{S_a} - {S_b} - {S_c})$
将式(14)代入式(11),且近似认为${V_{dc}} - {V_{ce}} + {V_d} \approx {V_{dc}}$,得到
(15) ${V_{an}} = \frac{1}{3}{V_{dc}}(\frac{{2{T_a}^* - {T_b}^* - {T_c}^*}}{{{T_s}}}) -\frac{1}{6}(\frac{{2M}}{{{T_{\rm{s}}}}} + {V_{ce}} + {V_d})[2{\mathop{\rm sgn}} ({i_a}) - {\mathop{\rm sgn}} ({i_b}) - {\mathop{\rm sgn}} ({i_c})]$
(16) $\Delta {V_a} = - \frac{1}{6}(\frac{{2M}}{{{T_{\rm{s}}}}}{U_{dc}} + {V_{ce}} + {V_d})[2{\mathop{\rm sgn}} ({i_a}) - {\mathop{\rm sgn}} ({i_b}) - {\mathop{\rm sgn}} ({i_c})]$
(17) $\Delta {V_b} = - \frac{1}{6}(\frac{{2M}}{{{T_{\rm{s}}}}}{U_{dc}} + {V_{ce}} + {V_d})[2{\mathop{\rm sgn}} ({i_b}) -{\mathop{\rm sgn}} ({i_a}) - {\mathop{\rm sgn}} ({i_c})]$
(18) $\Delta {V_c} = - \frac{1}{6}(\frac{{2M}}{{{T_{\rm{s}}}}}{U_{dc}} + {V_{ce}} + {V_d})[2{\mathop{\rm sgn}} ({i_c}) -{\mathop{\rm sgn}} ({i_b}) - {\mathop{\rm sgn}} ({i_a})]$
(19) $\Delta v = \frac{{2M}}{{{T_s}}}{U_{dc}} + {V_{ce}} + {V_d}$
3 新型死区补偿策略
提出一种新型死区补偿策略,通过分析直轴电压谐波,实时辨识死区的大小,将其用于前馈电压补偿以抵消死区影响。
3.1 前馈电压补偿方法
对三相误差电压进行3/2变换,将三相电压变化到$\alpha \beta$坐标系下
(20) $\left[ \begin{array}{l} \Delta {V_\alpha }\\ \Delta {V_\beta } \end{array} \right] = \frac{2}{3}\left[ {\begin{array}{*{20}{c}} \begin{array}{l} 1\\ 0 \end{array}&\begin{array}{l} - \frac{1}{2}\\ \frac{{\sqrt 3 }}{2} \end{array}&\begin{array}{l} - \frac{1}{2}\\ - \frac{{\sqrt 3 }}{2} \end{array} \end{array}} \right]\left[ \begin{array}{l} \Delta {V_a}\\ \Delta {V_b}\\ \Delta {V_c} \end{array} \right]$
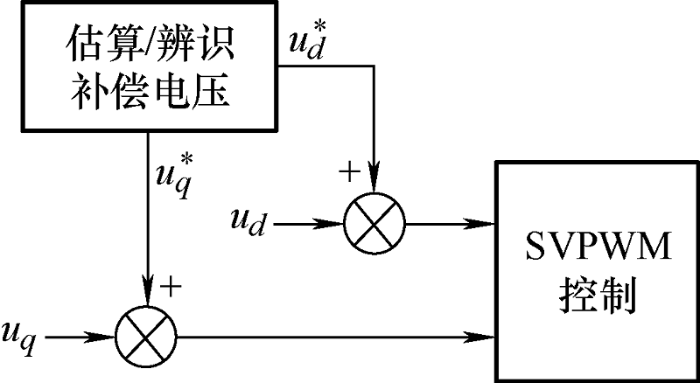
表1 中θ 为电流矢量角。在不同电流矢量角区间内,可以定量确定死区对电压造成的影响,且影响大小均与上一节推导中的Δv 有关。因此,实时计算电流矢量角度,根据表1 与式(21)实时改变SVPWM控制中的${V_\alpha }$和${V_\beta }$,即可抵消死区效应的影响,如图4 所示。
(21) $\left\{ \begin{array}{l}{V_\alpha } = {V_\alpha }^* - \Delta {V_\alpha }\\ {V_\beta } = {V_\beta }^* - \Delta {V_\beta }\end{array} \right.$
图4
3.2 基于直轴电压分析的Δv 辨识
从表1 和图4 中可以看出,决定死区补偿效果的关键是Δv 的取值是否准确。根据器件手册和程 序中死区设置,可以用式(19)粗略计算出Δv ,但数据手册中的参数不完全准确,而且开关管和二极管压降会随电流变化而变化,所以Δv 是一个随电流变化的量,因此有必要在线进行Δv 的辨识。
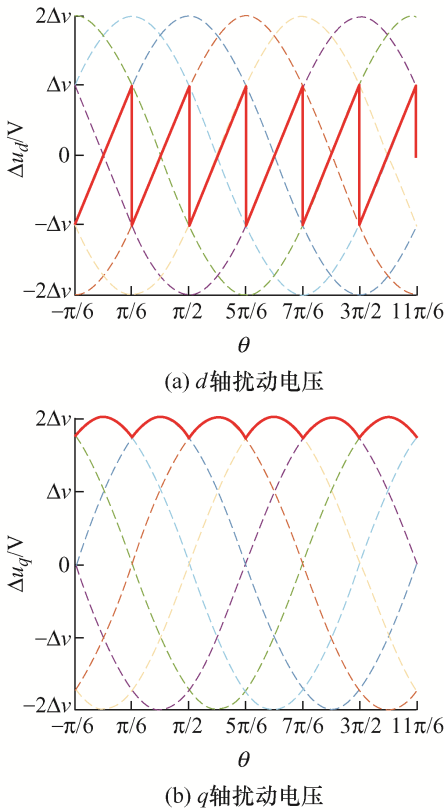
对ΔVα 和ΔVβ 进行Park变换,得到死区效应造成的d 、q 轴电压扰动如表2 所示。
当id =0时,d 轴和q 轴扰动电压如图5 所示。可见,以θ 增加3/π角度作为一个周期,d 轴电压扰动的大小在2Δv sin(-π/6)~2Δv sin(π/6)之间往复循环。
图5
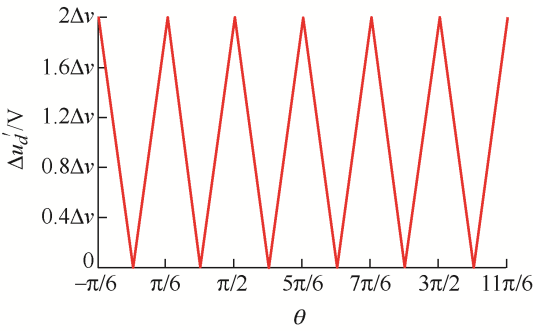
根据上述规律提出一种简易的方法在线计算Δv 。构建一个算式,根据电流矢量角,将每周期前半部分的ud 乘以–1,将计算后的ud 命名为ud ',表达式为
(22) ${u_d}' = {\mathop{\rm sgn}} \left[ {\theta \bmod (\frac{\pi }{3}) - \frac{\pi }{6}} \right]{u_d}$
经过上述变化,扰动电压Δud 在负半轴的部分全部翻转到正半轴,如图6 所示。
图6
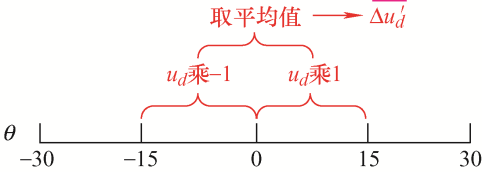
对多个周期做如上变化后取平均值,由于正好一半时间的ud 被取反。ud 原本的直流量和其他谐波平均值变为0,该平均值仅与Δv 有关
(23) $\overline {{u_d}'} = \frac{{2\Delta v\int_{{\rm{ - }}\pi /6}^{\pi /6} {\left| {\sin {\theta _e}} \right|} }}{{{\rm{\pi }}/3}} = 0.512\Delta v$
3.3 闭环死区补偿策略
使用上一节的方法可以辨识出所需的补偿电压Δv ,但仅仅进行开环计算并不实用,原因如下。
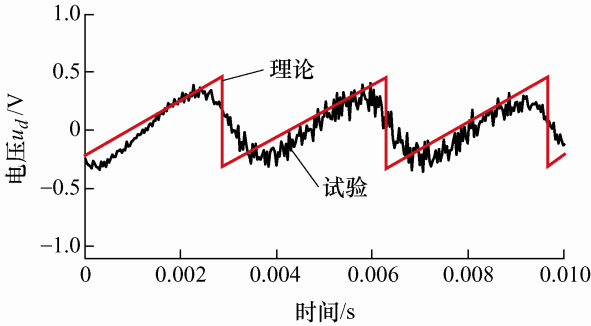
(1) 理论的死区扰动电压是在开环情况下推导所得。图7 为试验得出的ud 扰动电压与理论电压的对比,可见实际扰动电压在每周期的开头和结尾都不是单调递增的波形,与理论不完全相等。因此开环计算的Δv 将存在一定误差。
图7
(2) 将Δv 应用于前馈电压补偿后,则不再有完整的扰动电压作为分析材料,就无法在线对Δv 进行更新。
为解决以上问题,用闭环迭代的方式实时更新Δv ,并进行前馈电压补偿,方法如下所示。
首先,只提取每个周期中间部分的ud 进行翻转和取平均值计算,如图8 所示。这样可以保证提取的扰动电压有着单调递增的特性。如果没有死区补偿或补偿不足,$\overline {{u_d}'}$将为正。如果补偿过量,则扰动电压呈单调递减波形,$\overline {{u_d}'}$将为负。
图8
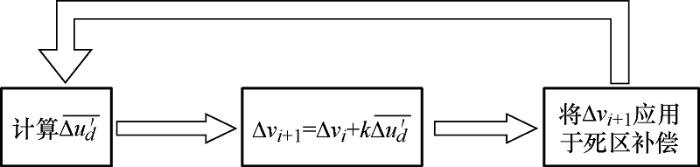
图9 为闭环死区补偿示意图。设当前采样时刻为i ,以一定长的时间为步长,将每一步算出的$\overline {{u_d}'}$乘以一个比例系数后与上一步结果叠加,并马上应用于死区补偿,多次迭代后Δv 将收敛于实际值附近。
图9
4 仿真结果分析
用上述死区补偿方法进行仿真,仿真中电机参数表3 所示,电机控制方式为id =0矢量控制。母线电压为132 V,加入死区时间Td =0.02Ts ,开关管开启时间、关断时间为0,管压降Vce 和Vd 均为0.5 V,算得理想死区补偿电压Δv =6.28 V。
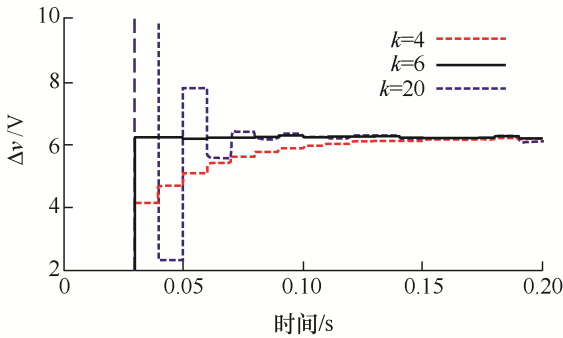
由于该死区补偿算法包含了一个比例系数k ,取不同的k 值进行多组仿真。将k =4、k =6、k =20时的Δv 波形绘制在图10 中。
图10
可见,取k =6时,仅一次计算就得到接近理想值的Δv ,随后稳定在理想值附近;取k < 6时,辨识到的Δv 逐渐上升,多次迭代后可以收敛于理想值;取过大的k 也能在几次迭代后收敛于理想值,但在收敛之前,Δv 在理想值上下大幅度浮动。
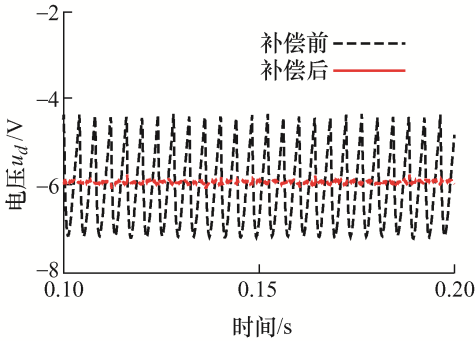
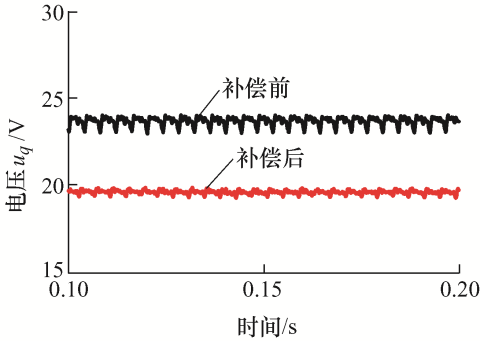
死区补偿前和补偿后的d、q 轴电压波形如 图11 、12 所示,有死区存在时,d、q 轴均存在锯齿状谐波,加入死区补偿后,谐波基本消除。此外,补偿后q 轴电压也有所降低,这是因为死区带来的q 轴扰动电压包含直流分量(图6 ),而补偿电压uq * 对其进行了补偿(图4 )。
图11
图12
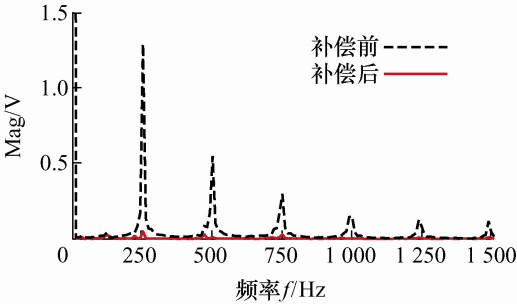
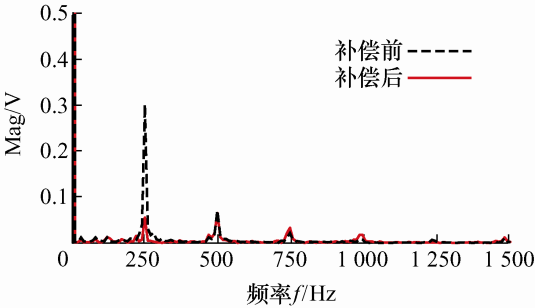
分别对无补偿和有补偿时的ud 和uq 进行傅里叶分析,如图13 和图14 所示。无补偿时,ud 和uq 都含有6倍频谐波及6的倍数次谐波,加入死区补偿后,谐波显著减小。
图13
图14
由以上仿真可见,在线死区补偿方法能够通过迭代计算准确辨识死区大小。死区补偿后,有效消除了d 、q 电压畸变,从根本上抵消了死区产生的不利影响。
5 试验结果与分析
搭建永磁同步电机驱动控制平台,以DSP为主控芯片,型号为TMS30F28075。逆变器中的开关管型号为英飞凌FS100R07N3E4,试验电机的参数如表4 所示。
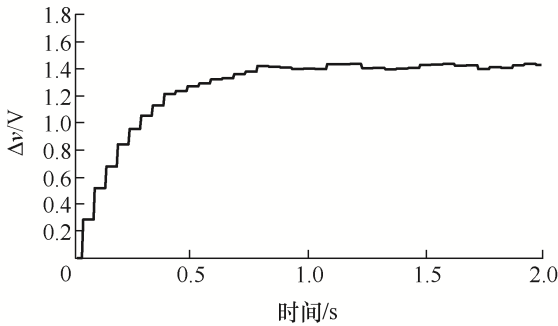
试验中母线电压为60 V,由于在转速较高时死区导致的电流畸变较小,因此试验中给定转速200 r/min。设置死区时间1 μs,查阅数据手册得到开关管Ton =0.08,Toff =0.29。PWM频率为10 kHz。给予一定负载,此时iq =0.8 A。
以0.05 s为周期进行Δv 计算,图15 为在线辨识Δv 结果,经历接近1 s后收敛于1.4 V附近。
图15
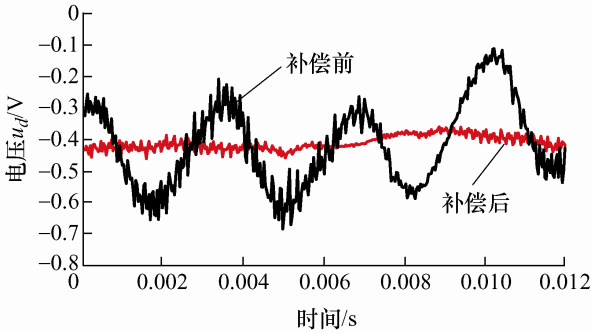
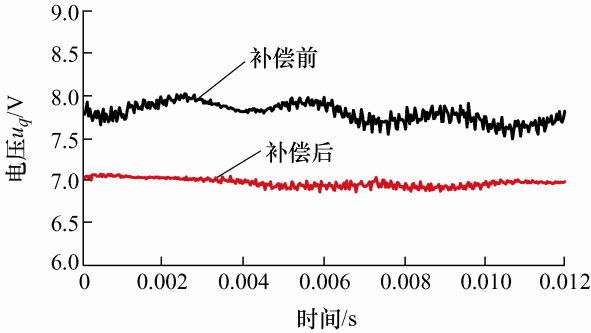
补偿前后的ud 和uq 如图16 和图17 所示,可见ud 波形由锯齿状变为直线,uq 波形与由波浪状变为直线,且幅值有所降低,效果与仿真相近。
图16
图17
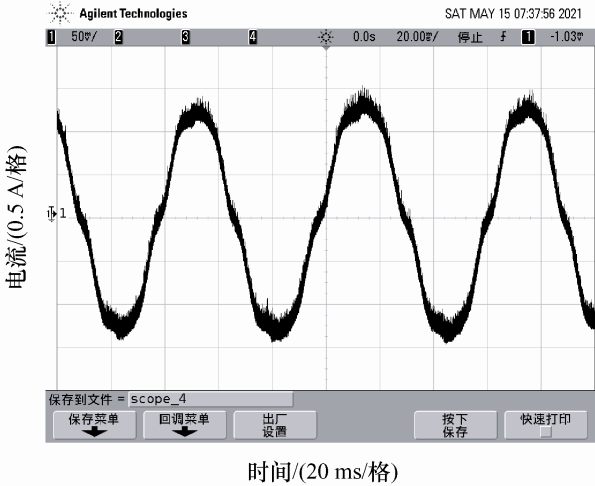
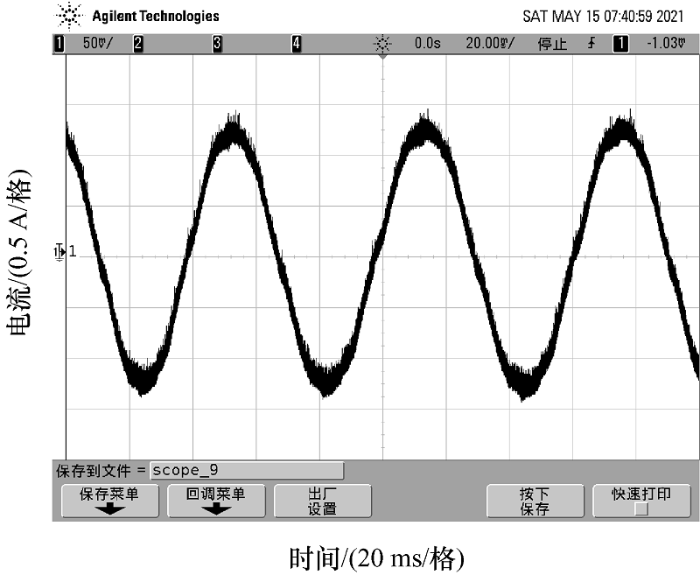
补偿前后的A相电流波形如图18 和图19 所示。补偿后电流恢复正弦形状。
图18
图19
综上,在线死区补偿方法能够在线辨识死区大小,补偿后能够有效消除电压、电流谐波。
6 结论
(1) 针对PMSM驱动系统中逆变器的死区效应,提出一种基于直轴电压分析的死区补偿策略。该方法能够在线辨识出死区的大小,通过前馈电压补偿的方式抵消死区影响。
(2) 仿真和试验表明该死区补偿方法能够有效消除d 、q 轴电压谐波,从根本上消除死区的影响。
(3) 该方法不需要添加额外的硬件,软件也很容易实现,具有较高的应用价值。
参考文献
View Option
[1]
赵录杰 , 段晶晶 , 贺雅琦 , 等 . 浅谈永磁电机伺服控制系统的控制策略研究
[J]. 中国新通信 , 2019 , 21 (12 ):228 .
[本文引用: 1]
ZHAO Lujie DUAN Jingjing HE Yaqi , et al . Research on control strategy of permanent magnet motor servo control system
[J]. China New Telecommunications , 2019 , 21 (12 ):228 .
[本文引用: 1]
[2]
张立伟 , 郑丽娜 , 宋立群 , 等 . 采用扩展卡尔曼滤波器对PMSM死区补偿的方法
[J]. 北京交通大学学报 , 2019 , 43 (2 ):93 -99 .
[本文引用: 1]
ZHANG Liwei ZHENG Lina SONG Liqun , et al . Extended Kalman filter is used to compensate PMSM dead zone
[J]. Journal of Beijing Jiaotong University , 2019 , 43 (2 ):93 -99 .
[本文引用: 1]
[3]
张成宝 , 苏阳 , 周中坚 . 电动助力转向电机控制系统死区效应研究
[J]. 电机与控制应用 , 2020 , 47 (6 ):70 -75 .
[本文引用: 1]
ZHANG Chengbao SU Yang ZHOU Zhongjian . Research on dead zone effect of electric power steering motor control system
[J]. Electric Machines and Control Application , 2020 , 47 (6 ):70 -75 .
[本文引用: 1]
[4]
冯振东 , 张力平 , 周浩 , 等 . 基于干扰观测器的逆变器在线死区补偿
[J]. 机电工程技术 , 2020 , 49 (2 ):175 -178 .
[本文引用: 1]
FENG Zhendong ZHANG Liping ZHOU Hao , et al . Online deadzone compensation of inverters based on disturbance observe
[J]. Mechanical and Electrical Engineering Technology , 2020 , 49 (2 ):175 -178 .
[本文引用: 1]
[5]
张志刚 , 李腾 , 杜劭琨 , 等 . 基于死区补偿的PMSM转矩脉动抑制研究
[J]. 控制工程 , 2021 , 28 (6 ):1108 -1114 .
[本文引用: 1]
ZHANG Zhigang LI Teng DU Shaokun , et al . Research on torque ripple suppression of PMSM based on dead zone compensation
[J]. Control Engineering , 2021 , 28 (6 ):1108 -1114 .
[本文引用: 1]
[6]
SHIM J CHOI H HA J I . Zero-sequence current suppression with dead-time compensation control in open-end winding PMSM
[C]// 2020 IEEE Energy Conversion Congress and Exposition (ECCE). IEEE , 2020 :3051 -3056 .
[本文引用: 1]
[7]
魏佳丹 , 薛嘉成 , 周波 , 等 . 四桥臂变换器驱动开绕组永磁同步电机系统的死区效应分析与抑制
[J]. 电工技术学报 , 2018 , 33 (17 ):4078 -4090 .
[本文引用: 1]
WEI Jiadan XUE Jiacheng ZHOU Bo , et al . Analysis and suppression of dead zone effect in open-winding permanent magnet synchronous motor driven by four-bridge arm converter
[J]. Transactions of China Electrotechnical Society , 2018 , 33 (17 ):4078 -4090 .
[本文引用: 1]
[8]
沈凤龙 , 满永奎 , 王建辉 , 等 . 变换器死区补偿方法
[J]. 辽东学院学报 , 2016 , 23 (3 ):192 -198 .
[本文引用: 1]
SHEN Fenglong Man Yongkui WANG Jianhui , et al . Compensation method of converter dead zone
[J]. Journal of Liaodong University , 2016 , 23 (3 ):192 -198 .
[本文引用: 1]
[9]
WANG Y GAO Q CAI X . Mixed PWM for dead-time elimination and compensation in a grid-tied inverter
[J]. IEEE Transactions on Industrial Electronics , 2011 , 58 (10 ):4797 -4803 .
DOI:10.1109/TIE.2011.2112313
URL
[本文引用: 1]
[10]
韩坤 , 孙晓 , 刘秉 , 等 . 一种永磁同步电机矢量控制SVPWM死区效应在线补偿方法
[J]. 中国电机工程学报 , 2018 , 38 (2 ):620 -627,692 .
[本文引用: 1]
HAN Kun SUN Xiao LIU Bing , et al . An on-line compensation method for dead-time effect of vector control SVPWM of permanent magnet synchronous motor
[J]. Proceedings of the CSEE , 2018 , 38 (2 ):620 -627,692 .
[本文引用: 1]
[11]
刘栋良 , 贺益康 . 交流伺服系统逆变器死区效应分析与补偿新方法
[J]. 中国电机工程学报 , 2008 , 28 (21 ):46 -50 .
[本文引用: 1]
LIU Dongliang HE Yikang . A new method for analysis and compensation of dead-time effect of AC servo system inverter
[J]. Proceedings of the CSEE , 2008 , 28 (21 ):46 -50 .
[本文引用: 1]
[12]
闫博 , 王家军 . 基于时间方法的电压源逆变器死区补偿研究
[J]. 杭州电子科技大学学报 , 2021 , 41 (3 ):43 -50 .
[本文引用: 1]
YAN Bo WANG Jiajun . Research on dead time compensation of voltage source inverter based on time method
[J]. Journal of Hangzhou Dianzi University , 2021 , 41 (3 ):43 -50 .
[本文引用: 1]
[13]
LI Y S WU P Y HO M T . Dead-time compensation for permanent magnet synchronous motor drives
[C]// 2020 International Automatic Control Conference (CACS). IEEE , 2020 :1 -6 .
[本文引用: 1]
[14]
陈令云 . 基于空间矢量脉宽调制的死区补偿方法研究
[J]. 机械制造 , 2019 , 57 (12 ):29 -31,44 .
[本文引用: 1]
CHEN Lingyun . Research on dead-time compensation method based on space vector pulse width modulation
[J]. Mechanical Manufacturing , 2019 , 57 (12 ):29 -31,44 .
[本文引用: 1]
[15]
CHEN W LI B XU D , et al . A dead-time compensation method for voltage source inverters
[C]// 2019 22nd International Conference on Electrical Machines and Systems (ICEMS). IEEE , 2019 :1 -6 .
[本文引用: 1]
浅谈永磁电机伺服控制系统的控制策略研究
1
2019
... 永磁同步电机(Permanent magnet synchronous machine,PMSM)由于具有体积小、功率密度高、高转矩惯性比等优点,被广泛应用于交流伺服系统中[1 ] .永磁同步电机需要使用逆变器作为驱动电路,为了防止逆变器上下桥臂直通,必须加入一段死区时间[2 ] ,此外,开关管存在开启时间和关断时间,开关管和二极管存在管压降,它们统称为“死区效应”[3 ,4 ] .死区效应会导致输出电压畸变,产生电流谐波,导致电机损耗提升,转矩脉动增大,控制性能降低[5 ,6 ,7 ] .因此,需要对死区进行补偿.进行死区补偿可以从硬件和软件两个方面进行[8 ] . ...
浅谈永磁电机伺服控制系统的控制策略研究
1
2019
... 永磁同步电机(Permanent magnet synchronous machine,PMSM)由于具有体积小、功率密度高、高转矩惯性比等优点,被广泛应用于交流伺服系统中[1 ] .永磁同步电机需要使用逆变器作为驱动电路,为了防止逆变器上下桥臂直通,必须加入一段死区时间[2 ] ,此外,开关管存在开启时间和关断时间,开关管和二极管存在管压降,它们统称为“死区效应”[3 ,4 ] .死区效应会导致输出电压畸变,产生电流谐波,导致电机损耗提升,转矩脉动增大,控制性能降低[5 ,6 ,7 ] .因此,需要对死区进行补偿.进行死区补偿可以从硬件和软件两个方面进行[8 ] . ...
采用扩展卡尔曼滤波器对PMSM死区补偿的方法
1
2019
... 永磁同步电机(Permanent magnet synchronous machine,PMSM)由于具有体积小、功率密度高、高转矩惯性比等优点,被广泛应用于交流伺服系统中[1 ] .永磁同步电机需要使用逆变器作为驱动电路,为了防止逆变器上下桥臂直通,必须加入一段死区时间[2 ] ,此外,开关管存在开启时间和关断时间,开关管和二极管存在管压降,它们统称为“死区效应”[3 ,4 ] .死区效应会导致输出电压畸变,产生电流谐波,导致电机损耗提升,转矩脉动增大,控制性能降低[5 ,6 ,7 ] .因此,需要对死区进行补偿.进行死区补偿可以从硬件和软件两个方面进行[8 ] . ...
采用扩展卡尔曼滤波器对PMSM死区补偿的方法
1
2019
... 永磁同步电机(Permanent magnet synchronous machine,PMSM)由于具有体积小、功率密度高、高转矩惯性比等优点,被广泛应用于交流伺服系统中[1 ] .永磁同步电机需要使用逆变器作为驱动电路,为了防止逆变器上下桥臂直通,必须加入一段死区时间[2 ] ,此外,开关管存在开启时间和关断时间,开关管和二极管存在管压降,它们统称为“死区效应”[3 ,4 ] .死区效应会导致输出电压畸变,产生电流谐波,导致电机损耗提升,转矩脉动增大,控制性能降低[5 ,6 ,7 ] .因此,需要对死区进行补偿.进行死区补偿可以从硬件和软件两个方面进行[8 ] . ...
电动助力转向电机控制系统死区效应研究
1
2020
... 永磁同步电机(Permanent magnet synchronous machine,PMSM)由于具有体积小、功率密度高、高转矩惯性比等优点,被广泛应用于交流伺服系统中[1 ] .永磁同步电机需要使用逆变器作为驱动电路,为了防止逆变器上下桥臂直通,必须加入一段死区时间[2 ] ,此外,开关管存在开启时间和关断时间,开关管和二极管存在管压降,它们统称为“死区效应”[3 ,4 ] .死区效应会导致输出电压畸变,产生电流谐波,导致电机损耗提升,转矩脉动增大,控制性能降低[5 ,6 ,7 ] .因此,需要对死区进行补偿.进行死区补偿可以从硬件和软件两个方面进行[8 ] . ...
电动助力转向电机控制系统死区效应研究
1
2020
... 永磁同步电机(Permanent magnet synchronous machine,PMSM)由于具有体积小、功率密度高、高转矩惯性比等优点,被广泛应用于交流伺服系统中[1 ] .永磁同步电机需要使用逆变器作为驱动电路,为了防止逆变器上下桥臂直通,必须加入一段死区时间[2 ] ,此外,开关管存在开启时间和关断时间,开关管和二极管存在管压降,它们统称为“死区效应”[3 ,4 ] .死区效应会导致输出电压畸变,产生电流谐波,导致电机损耗提升,转矩脉动增大,控制性能降低[5 ,6 ,7 ] .因此,需要对死区进行补偿.进行死区补偿可以从硬件和软件两个方面进行[8 ] . ...
基于干扰观测器的逆变器在线死区补偿
1
2020
... 永磁同步电机(Permanent magnet synchronous machine,PMSM)由于具有体积小、功率密度高、高转矩惯性比等优点,被广泛应用于交流伺服系统中[1 ] .永磁同步电机需要使用逆变器作为驱动电路,为了防止逆变器上下桥臂直通,必须加入一段死区时间[2 ] ,此外,开关管存在开启时间和关断时间,开关管和二极管存在管压降,它们统称为“死区效应”[3 ,4 ] .死区效应会导致输出电压畸变,产生电流谐波,导致电机损耗提升,转矩脉动增大,控制性能降低[5 ,6 ,7 ] .因此,需要对死区进行补偿.进行死区补偿可以从硬件和软件两个方面进行[8 ] . ...
基于干扰观测器的逆变器在线死区补偿
1
2020
... 永磁同步电机(Permanent magnet synchronous machine,PMSM)由于具有体积小、功率密度高、高转矩惯性比等优点,被广泛应用于交流伺服系统中[1 ] .永磁同步电机需要使用逆变器作为驱动电路,为了防止逆变器上下桥臂直通,必须加入一段死区时间[2 ] ,此外,开关管存在开启时间和关断时间,开关管和二极管存在管压降,它们统称为“死区效应”[3 ,4 ] .死区效应会导致输出电压畸变,产生电流谐波,导致电机损耗提升,转矩脉动增大,控制性能降低[5 ,6 ,7 ] .因此,需要对死区进行补偿.进行死区补偿可以从硬件和软件两个方面进行[8 ] . ...
基于死区补偿的PMSM转矩脉动抑制研究
1
2021
... 永磁同步电机(Permanent magnet synchronous machine,PMSM)由于具有体积小、功率密度高、高转矩惯性比等优点,被广泛应用于交流伺服系统中[1 ] .永磁同步电机需要使用逆变器作为驱动电路,为了防止逆变器上下桥臂直通,必须加入一段死区时间[2 ] ,此外,开关管存在开启时间和关断时间,开关管和二极管存在管压降,它们统称为“死区效应”[3 ,4 ] .死区效应会导致输出电压畸变,产生电流谐波,导致电机损耗提升,转矩脉动增大,控制性能降低[5 ,6 ,7 ] .因此,需要对死区进行补偿.进行死区补偿可以从硬件和软件两个方面进行[8 ] . ...
基于死区补偿的PMSM转矩脉动抑制研究
1
2021
... 永磁同步电机(Permanent magnet synchronous machine,PMSM)由于具有体积小、功率密度高、高转矩惯性比等优点,被广泛应用于交流伺服系统中[1 ] .永磁同步电机需要使用逆变器作为驱动电路,为了防止逆变器上下桥臂直通,必须加入一段死区时间[2 ] ,此外,开关管存在开启时间和关断时间,开关管和二极管存在管压降,它们统称为“死区效应”[3 ,4 ] .死区效应会导致输出电压畸变,产生电流谐波,导致电机损耗提升,转矩脉动增大,控制性能降低[5 ,6 ,7 ] .因此,需要对死区进行补偿.进行死区补偿可以从硬件和软件两个方面进行[8 ] . ...
Zero-sequence current suppression with dead-time compensation control in open-end winding PMSM
1
2020
... 永磁同步电机(Permanent magnet synchronous machine,PMSM)由于具有体积小、功率密度高、高转矩惯性比等优点,被广泛应用于交流伺服系统中[1 ] .永磁同步电机需要使用逆变器作为驱动电路,为了防止逆变器上下桥臂直通,必须加入一段死区时间[2 ] ,此外,开关管存在开启时间和关断时间,开关管和二极管存在管压降,它们统称为“死区效应”[3 ,4 ] .死区效应会导致输出电压畸变,产生电流谐波,导致电机损耗提升,转矩脉动增大,控制性能降低[5 ,6 ,7 ] .因此,需要对死区进行补偿.进行死区补偿可以从硬件和软件两个方面进行[8 ] . ...
四桥臂变换器驱动开绕组永磁同步电机系统的死区效应分析与抑制
1
2018
... 永磁同步电机(Permanent magnet synchronous machine,PMSM)由于具有体积小、功率密度高、高转矩惯性比等优点,被广泛应用于交流伺服系统中[1 ] .永磁同步电机需要使用逆变器作为驱动电路,为了防止逆变器上下桥臂直通,必须加入一段死区时间[2 ] ,此外,开关管存在开启时间和关断时间,开关管和二极管存在管压降,它们统称为“死区效应”[3 ,4 ] .死区效应会导致输出电压畸变,产生电流谐波,导致电机损耗提升,转矩脉动增大,控制性能降低[5 ,6 ,7 ] .因此,需要对死区进行补偿.进行死区补偿可以从硬件和软件两个方面进行[8 ] . ...
四桥臂变换器驱动开绕组永磁同步电机系统的死区效应分析与抑制
1
2018
... 永磁同步电机(Permanent magnet synchronous machine,PMSM)由于具有体积小、功率密度高、高转矩惯性比等优点,被广泛应用于交流伺服系统中[1 ] .永磁同步电机需要使用逆变器作为驱动电路,为了防止逆变器上下桥臂直通,必须加入一段死区时间[2 ] ,此外,开关管存在开启时间和关断时间,开关管和二极管存在管压降,它们统称为“死区效应”[3 ,4 ] .死区效应会导致输出电压畸变,产生电流谐波,导致电机损耗提升,转矩脉动增大,控制性能降低[5 ,6 ,7 ] .因此,需要对死区进行补偿.进行死区补偿可以从硬件和软件两个方面进行[8 ] . ...
变换器死区补偿方法
1
2016
... 永磁同步电机(Permanent magnet synchronous machine,PMSM)由于具有体积小、功率密度高、高转矩惯性比等优点,被广泛应用于交流伺服系统中[1 ] .永磁同步电机需要使用逆变器作为驱动电路,为了防止逆变器上下桥臂直通,必须加入一段死区时间[2 ] ,此外,开关管存在开启时间和关断时间,开关管和二极管存在管压降,它们统称为“死区效应”[3 ,4 ] .死区效应会导致输出电压畸变,产生电流谐波,导致电机损耗提升,转矩脉动增大,控制性能降低[5 ,6 ,7 ] .因此,需要对死区进行补偿.进行死区补偿可以从硬件和软件两个方面进行[8 ] . ...
变换器死区补偿方法
1
2016
... 永磁同步电机(Permanent magnet synchronous machine,PMSM)由于具有体积小、功率密度高、高转矩惯性比等优点,被广泛应用于交流伺服系统中[1 ] .永磁同步电机需要使用逆变器作为驱动电路,为了防止逆变器上下桥臂直通,必须加入一段死区时间[2 ] ,此外,开关管存在开启时间和关断时间,开关管和二极管存在管压降,它们统称为“死区效应”[3 ,4 ] .死区效应会导致输出电压畸变,产生电流谐波,导致电机损耗提升,转矩脉动增大,控制性能降低[5 ,6 ,7 ] .因此,需要对死区进行补偿.进行死区补偿可以从硬件和软件两个方面进行[8 ] . ...
Mixed PWM for dead-time elimination and compensation in a grid-tied inverter
1
2011
... 文献[9 ]用硬件检测出实际输出电压,与控制器给定值相比较得出死区导致的电压偏差,然后将偏差与给定值叠加以进行补偿.缺点是需要额外的硬件成本. ...
一种永磁同步电机矢量控制SVPWM死区效应在线补偿方法
1
2018
... 软件补偿是利用已有的采样数据,设计各种算法以尽可能消除死区的影响.文献[10 ,11 ]根据PMSM数学模型建立电压误差观测器,实时观测出当前给定电压与应给定电压的误差,建立基于误差电压的PI反馈,将误差电压前馈到给定电压中以进行补偿.但该方法需要已知准确的电机电阻、电感、磁链等参数.文献[12 ,13 ,14 ]建立考虑死区的输出电压模型,通过查表估计的方法来确定补偿电压大小,根据死区对输出电压的影响,在控制器中反向给予电压以进行补偿.但是死区会随工况变化,因此估计的补偿电压不完全准确.文献[15 ]离线测量死区大小与输出电流的关系,根据确定的关系在线调整补偿电压,主要缺点是对每一个逆变器都要进行一轮离线试验. ...
一种永磁同步电机矢量控制SVPWM死区效应在线补偿方法
1
2018
... 软件补偿是利用已有的采样数据,设计各种算法以尽可能消除死区的影响.文献[10 ,11 ]根据PMSM数学模型建立电压误差观测器,实时观测出当前给定电压与应给定电压的误差,建立基于误差电压的PI反馈,将误差电压前馈到给定电压中以进行补偿.但该方法需要已知准确的电机电阻、电感、磁链等参数.文献[12 ,13 ,14 ]建立考虑死区的输出电压模型,通过查表估计的方法来确定补偿电压大小,根据死区对输出电压的影响,在控制器中反向给予电压以进行补偿.但是死区会随工况变化,因此估计的补偿电压不完全准确.文献[15 ]离线测量死区大小与输出电流的关系,根据确定的关系在线调整补偿电压,主要缺点是对每一个逆变器都要进行一轮离线试验. ...
交流伺服系统逆变器死区效应分析与补偿新方法
1
2008
... 软件补偿是利用已有的采样数据,设计各种算法以尽可能消除死区的影响.文献[10 ,11 ]根据PMSM数学模型建立电压误差观测器,实时观测出当前给定电压与应给定电压的误差,建立基于误差电压的PI反馈,将误差电压前馈到给定电压中以进行补偿.但该方法需要已知准确的电机电阻、电感、磁链等参数.文献[12 ,13 ,14 ]建立考虑死区的输出电压模型,通过查表估计的方法来确定补偿电压大小,根据死区对输出电压的影响,在控制器中反向给予电压以进行补偿.但是死区会随工况变化,因此估计的补偿电压不完全准确.文献[15 ]离线测量死区大小与输出电流的关系,根据确定的关系在线调整补偿电压,主要缺点是对每一个逆变器都要进行一轮离线试验. ...
交流伺服系统逆变器死区效应分析与补偿新方法
1
2008
... 软件补偿是利用已有的采样数据,设计各种算法以尽可能消除死区的影响.文献[10 ,11 ]根据PMSM数学模型建立电压误差观测器,实时观测出当前给定电压与应给定电压的误差,建立基于误差电压的PI反馈,将误差电压前馈到给定电压中以进行补偿.但该方法需要已知准确的电机电阻、电感、磁链等参数.文献[12 ,13 ,14 ]建立考虑死区的输出电压模型,通过查表估计的方法来确定补偿电压大小,根据死区对输出电压的影响,在控制器中反向给予电压以进行补偿.但是死区会随工况变化,因此估计的补偿电压不完全准确.文献[15 ]离线测量死区大小与输出电流的关系,根据确定的关系在线调整补偿电压,主要缺点是对每一个逆变器都要进行一轮离线试验. ...
基于时间方法的电压源逆变器死区补偿研究
1
2021
... 软件补偿是利用已有的采样数据,设计各种算法以尽可能消除死区的影响.文献[10 ,11 ]根据PMSM数学模型建立电压误差观测器,实时观测出当前给定电压与应给定电压的误差,建立基于误差电压的PI反馈,将误差电压前馈到给定电压中以进行补偿.但该方法需要已知准确的电机电阻、电感、磁链等参数.文献[12 ,13 ,14 ]建立考虑死区的输出电压模型,通过查表估计的方法来确定补偿电压大小,根据死区对输出电压的影响,在控制器中反向给予电压以进行补偿.但是死区会随工况变化,因此估计的补偿电压不完全准确.文献[15 ]离线测量死区大小与输出电流的关系,根据确定的关系在线调整补偿电压,主要缺点是对每一个逆变器都要进行一轮离线试验. ...
基于时间方法的电压源逆变器死区补偿研究
1
2021
... 软件补偿是利用已有的采样数据,设计各种算法以尽可能消除死区的影响.文献[10 ,11 ]根据PMSM数学模型建立电压误差观测器,实时观测出当前给定电压与应给定电压的误差,建立基于误差电压的PI反馈,将误差电压前馈到给定电压中以进行补偿.但该方法需要已知准确的电机电阻、电感、磁链等参数.文献[12 ,13 ,14 ]建立考虑死区的输出电压模型,通过查表估计的方法来确定补偿电压大小,根据死区对输出电压的影响,在控制器中反向给予电压以进行补偿.但是死区会随工况变化,因此估计的补偿电压不完全准确.文献[15 ]离线测量死区大小与输出电流的关系,根据确定的关系在线调整补偿电压,主要缺点是对每一个逆变器都要进行一轮离线试验. ...
Dead-time compensation for permanent magnet synchronous motor drives
1
2020
... 软件补偿是利用已有的采样数据,设计各种算法以尽可能消除死区的影响.文献[10 ,11 ]根据PMSM数学模型建立电压误差观测器,实时观测出当前给定电压与应给定电压的误差,建立基于误差电压的PI反馈,将误差电压前馈到给定电压中以进行补偿.但该方法需要已知准确的电机电阻、电感、磁链等参数.文献[12 ,13 ,14 ]建立考虑死区的输出电压模型,通过查表估计的方法来确定补偿电压大小,根据死区对输出电压的影响,在控制器中反向给予电压以进行补偿.但是死区会随工况变化,因此估计的补偿电压不完全准确.文献[15 ]离线测量死区大小与输出电流的关系,根据确定的关系在线调整补偿电压,主要缺点是对每一个逆变器都要进行一轮离线试验. ...
基于空间矢量脉宽调制的死区补偿方法研究
1
2019
... 软件补偿是利用已有的采样数据,设计各种算法以尽可能消除死区的影响.文献[10 ,11 ]根据PMSM数学模型建立电压误差观测器,实时观测出当前给定电压与应给定电压的误差,建立基于误差电压的PI反馈,将误差电压前馈到给定电压中以进行补偿.但该方法需要已知准确的电机电阻、电感、磁链等参数.文献[12 ,13 ,14 ]建立考虑死区的输出电压模型,通过查表估计的方法来确定补偿电压大小,根据死区对输出电压的影响,在控制器中反向给予电压以进行补偿.但是死区会随工况变化,因此估计的补偿电压不完全准确.文献[15 ]离线测量死区大小与输出电流的关系,根据确定的关系在线调整补偿电压,主要缺点是对每一个逆变器都要进行一轮离线试验. ...
基于空间矢量脉宽调制的死区补偿方法研究
1
2019
... 软件补偿是利用已有的采样数据,设计各种算法以尽可能消除死区的影响.文献[10 ,11 ]根据PMSM数学模型建立电压误差观测器,实时观测出当前给定电压与应给定电压的误差,建立基于误差电压的PI反馈,将误差电压前馈到给定电压中以进行补偿.但该方法需要已知准确的电机电阻、电感、磁链等参数.文献[12 ,13 ,14 ]建立考虑死区的输出电压模型,通过查表估计的方法来确定补偿电压大小,根据死区对输出电压的影响,在控制器中反向给予电压以进行补偿.但是死区会随工况变化,因此估计的补偿电压不完全准确.文献[15 ]离线测量死区大小与输出电流的关系,根据确定的关系在线调整补偿电压,主要缺点是对每一个逆变器都要进行一轮离线试验. ...
A dead-time compensation method for voltage source inverters
1
2019
... 软件补偿是利用已有的采样数据,设计各种算法以尽可能消除死区的影响.文献[10 ,11 ]根据PMSM数学模型建立电压误差观测器,实时观测出当前给定电压与应给定电压的误差,建立基于误差电压的PI反馈,将误差电压前馈到给定电压中以进行补偿.但该方法需要已知准确的电机电阻、电感、磁链等参数.文献[12 ,13 ,14 ]建立考虑死区的输出电压模型,通过查表估计的方法来确定补偿电压大小,根据死区对输出电压的影响,在控制器中反向给予电压以进行补偿.但是死区会随工况变化,因此估计的补偿电压不完全准确.文献[15 ]离线测量死区大小与输出电流的关系,根据确定的关系在线调整补偿电压,主要缺点是对每一个逆变器都要进行一轮离线试验. ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}