1 引言
电动汽车作为一种新能源汽车,具有高效、清洁的特点,在缓解能源短缺、减轻环境污染等方面具有较大的优势,目前已成为世界各国的战略发展目标,我国“十二五”规划明确指出将电动汽车行业作为未来战略发展目标,预计在2030年每年生产1 500万辆电动汽车[1 ] 。
大规模的电动汽车充电会给配电网的安全运行带来挑战,若不进行适当的调控,配电网负荷波动将会加剧,并带来设备过载、电压功率因数下降等不良影响[2 ,3 ] 。
为了保证配电网的安全运行,减小电动汽车无序充电带来的影响,国内外学者开展了电动汽车充电优化策略的研究。目前电动汽车的充电优化策略主要分为集中式充电优化方式和分层充电优化方式两种。其中,集中式充电优化方式是根据建立的充电优化模型对当前时段接入的所有电动汽车进行集中式优化,这个过程通常由控制中心独立完成。文献[4 ,5 ]提出了以配电网网损最小为目标的充电优化方法;文献[6 ]针对配电网的负荷波动,将配电网高峰时段的充电负荷转移至夜间低谷期,减少了配电网的负荷峰谷差;文献[7 ,8 ]以电网购电成本最小为目标,优化电动汽车的最优充放电时段。上述文献都是通过集中式充电优化的方法来调控电动汽车的充电时段,但这种优化方式的计算量较大,通常需要大量的信息传递,不利于电动汽车充电的实时 优化。
针对电动汽车集中式充电优化方式计算量大、通信要求高的问题,相关文献开展了电动汽车分层充电优化方式的研究。在分层充电优化方式中,代理商起到连接电动汽车与控制中心的作用,控制信号先由控制中心发送至本地代理商,再由代理商将信号分发至每辆电动汽车,这种控制方式降低了通信难度,更适用于电动汽车的实时调度。文献[9 ]提出一种由代理商分散控制的充电管理方式,代理商负责计算区域内电动汽车的充电负荷曲线,控制中心再对各区域的电动汽车进行协调控制;文献[10 ]针对配电网负荷波动,提出了上层以减少负荷波动为目标、下层以上下层调度偏差最小为目标的双层优化模型。上述文献考虑了配电网的利益,但忽略了用户的充电成本,且认为所有的用户均愿意服从充电安排。
文献[11 ]建立了双层充电优化模型,上层模型以全局利益为目标,为下层模型提供约束条件,下层模型以各节点充电费用和充电偏差最小为目标,将各节点对上层控制所得功率指导结果为约束条件,采用交替方向乘子法求解目标函数,各个节点之间不断协调合作,从而得到单个电动汽车充电时段的最优解,该方法需要大量的信息传递,因此对通信的要求较高;文献[12 ]引入分层分区的理念,上层采用粒子群算法优化各时段的总充放电功率,下层采用顺序选择法保障用户的充电满意度,粒子群算法在处理大规模的优化问题时容易受到种群多样性的影响,出现陷入局部最优的情况,导致优化效果较差。
针对上述问题,本文以电动汽车的充电时段为优化目标,建立了包含用户充电费用最少、配电网总负荷方差最小的电动汽车分层优化模型。上层以充电费用最少为目标,根据车辆在电价低谷时段充电时间越久充电费用越少的准则优化车辆的充电时段范围,从而得到满足充电费用最少的全部最优解,并将其作为下层优化的约束条件,减轻了下层充电优化的计算负担;下层以配电网总负荷方差最小为目标通过改进的粒子群算法求解优化模型,提高了粒子群算法的优化效果。结合算例,利用所提出的模型,对比分析了不同充电数量、不同用户响应度下配电网负荷、用户充电费用的优化结果。
2 电动汽车分层充电优化策略
电动汽车的分层充电优化策略主要由智能充电桩和本地运营商两部分组成,针对用户充电成本,智能充电桩以用户充电费用最少为目标选取电动汽车的充电时间范围,针对配电网负荷波动,本地运营商以配电网总负荷方差最小为目标优化电动汽车的充电起始时间。
2.1 电动汽车的充电时长计算
为了确保电动汽车在充电后的荷电状态(State of charge,SOC)达到用户设置的期望值SOCe Tc ,计算公式如式(1)所示
(1) ${T_c} = \frac{{\left( {SO{C_e} - SO{C_c}} \right)ET}}{{{P_c}}}$
式中,SOCc ET 为车辆的蓄电池容量,Pc 为充电功率。
2.2 电动汽车充电分层优化模型
考虑到电动汽车接入、离开充电桩的时间具有很大的随机性,本文将一天分为96个时段,对电动汽车充电进行分时段优化。
电动汽车在充电开始前用户有权选择充电过程是否服从电网安排,对于电动汽车用户来说,充电成本是用户选择服从电网安排的主要因素,因此智能充电桩以用户充电费用最少为目标,目标函数如式(2)所示
(2) ${\text{f}}\left( {{P_{\text{j}}}} \right) = \min \sum\limits_{{\text{j = }}{{\text{J}}_b}}^{{J_e}} {\left( {{P_j}\Delta t{c_{\text{j}}}} \right)}$
式中,Jb 为车辆接入充电桩的时段;Je 为用户设置的离开充电桩时段;Pj 为电动汽车在时段j 的充电功率(若车辆在时段j 充电,则Pj 等于Pc ,若车辆不在时段j 充电,则Pj 等于0);Δt 为每个时段时长,取0.25 h;cj 为第j 个时段的电动汽车充电电价。
电动汽车在充电结束后的电池容量应满足式(3)所示的约束条件
(3) $SO{C_e} \cdot ET \leqslant SO{C_c} \cdot ET + \sum\limits_{j = {J_b}}^{{J_e}} {{P_j}} \leqslant ET$
考虑到电动汽车充电对电网负荷波动的影响,本地运营商以配电网总负荷方差最小为目标,目标函数如式(4)所示
(4) $f\left( {{P_{{\text{i}},j}}} \right) = \min \frac{1}{T}{\sum\limits_{{\text{j}} = 1}^T {\left[ {\left( {{P_{L,j}} + \sum\limits_{i = 1}^N {{P_{{\text{i}},j}}} } \right) - {P_{avr}}} \right]} ^2}$
式中,T 为一天时段段数,取96;N 为第j 个时段内接入充电桩的电动汽车总量;PL,j 为第j 个时段的配电网常规负荷;Pi,j 为车辆i 在时段j 的充电功率;Pavr 为优化时段内配电网总负荷的平均值,如式(5)所示。
(5) ${P_{{\text{avr}}}} = \frac{1}{T}\sum\limits_{{\text{j}} = 1}^T {\left( {{P_{L,{\text{j}}}} + \sum\limits_{i = 1}^N {{P_{i,j}}} } \right)}$
假设智能充电桩根据优化模型求得的车辆充电时段范围为[Jcb , i Jce , i
(6) ${{\text{J}}_{{\text{cb,i}}}} \leqslant {J_i} \leqslant {J_{ce,i}}$
2.3 电动汽车充电分层优化控制流程
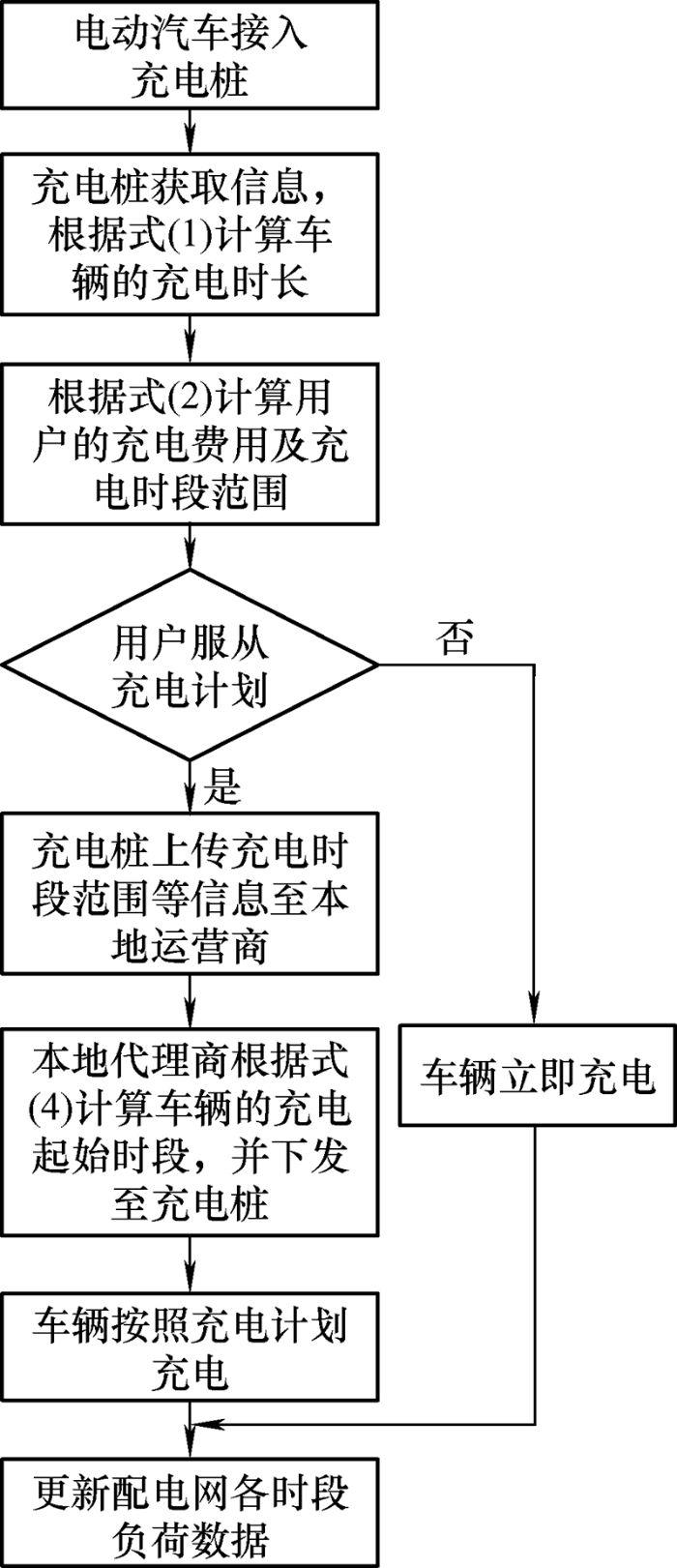
电动汽车充电分层优化控制流程如图1 所示,步骤如下。
图1
(1) 电动汽车接入智能充电桩后,充电桩获取车辆的电池状态、用户设置的离开充电桩时间、充电结束时期望车辆达到的SOC等信息,并根据式(1)计算车辆的充电时长。
(2) 充电桩根据式(2)求解满足用户充电费用最少的充电时段范围及充电费用,并将充电时段范围及充电费用传递给用户。
(3) 用户根据充电时间范围及充电费用选择是否服从充电计划,若不服从则充电立即开始,充电桩将充电时间上传至本地运营商,本地运营商更新配电网各时段的负荷数据,若服从充电计划则充电桩将车辆的充电时间范围、电池状态、用户设置的信息上传至本地运营商。
(4) 本地运营商根据式(4)优化电动汽车的充电起始时段,并将优化后的充电起始时段下发至充 电桩。
(5) 充电桩根据车辆的充电起始时间执行充电计划,本地运营商更新配电网各时段的负荷数据。
3 智能充电桩优化模型求解
智能充电桩以用户充电费用最少为目标,其优化模型通常具有多个最优解,因此能够在用户充电费用最小化的基础上进一步以配电网负荷方差最小为目标进行分层优化。
常用的优化模型求解方法一般分为智能优化算法和穷举法,其中智能优化算法具有较高的计算效率,能够较好地处理复杂的优化问题,但所得的最优解通常只有一个,若要实现本文提出的分层优化策略,则需要将智能充电桩求得的最少充电费用作为本地运营商优化的约束条件,使本地运营商优化后的用户充电费用不大于智能充电桩求得的最少充电费用,这样虽然能够保障用户的利益,但是会加大本地运营商的计算量,不利于电动汽车充电的实时优化。
穷举法根据搜索空间列出所有可行解,能够得到满足条件的全部最优解,但计算较为复杂,对设备的硬件要求较高,针对以上问题,本文转变求解思路,将计算用户充电费用最少的问题转变为计算车辆在电价谷时段充电时长最久的问题。
根据充电分时电价可知若车辆在电价最低时段充电时间越久则充电费用越少,因此将充电时段分情况考虑,假设充电电价谷时段为[Jlb ,Jle ],车辆接入充电桩时段为Jb 、离开充电桩时段为Je ,充电时长为Jc ,分析车辆所有可能的停留时段与电价谷时段的关系,当满足以下条件时,最优充电时段范围如下所示。
(1) 当Jb <Jlb ,Je <Jle ,Jlb +Jc <Je 时,车辆能够全程在电价谷时段充电,此时最优充电时段范围为[Jlb ,Je ]。
(2) 当Jb <Jlb ,Je <Jle ,Jlb +Jc ≥Je 时,车辆在谷时段最多充(J e –Jlb )个时长,此时最优充电时段范围为[Jε –Jc ,Je ]。
(3) 当Jb <Jlb ,Je ≥Jle ,Jlb +Jc <Jle 时,车辆能够全程在电价谷时段充电,此时最优充电时段范围为[Jlb ,Jle ]。
(4) 当Jb <Jlb ,Je ≥Jle ,Jle ≤Jlb +Jc <Je ,Jb +Jc <Jle 时,车辆在谷时段最多充(Jl e –Jlb )个时长,此时最优充电时段范围为[Jle –Jc ,Jlb +Jc ]。
(5) 当Jb <Jlb ,Je ≥Jle ,Jle ≤Jlb +Jc <Je ,Jb +Jc ≥Jle 时,车辆在谷时段最多充(Jl e –Jlb )个时长,此时最优充电时段范围为[Jb ,Jlb +Jc ]。
(6) 当Jb <Jlb ,Je ≥Jle ,Je ≤Jlb +Jc ,Jb +Jc <Jle 时,车辆在谷时段最多充(Jl e –Jlb )个时长,此时最优充电时段范围为[Jle –Jc ,Je ]。
(7) 当Jb <Jlb ,Je ≥Jle ,Je ≤Jlb +Jc ,Jb +Jc ≥Jle 时,车辆在谷时段最多充(Jl e –Jlb )个时长,此时最优充电时段范围为[Jb ,Je ]。
(8) 当Jb ≥Jlb ,Je <Jle 时,车辆能够全程在电价谷时段充电,此时最优充电时段范围为[Jb ,Je ]。
(9) 当Jb ≥Jlb ,Je ≥Jle ,Jb +Jc <Jle 时,车辆能够全程在电价谷时段充电,此时最优充电时段范围为[Jb ,Jle –Jc ]。
(10) 当Jb ≥Jlb ,Je ≥Jle ,Jb +Jc ≥Jle 时,车辆在谷时段最多充(Jl e –Jb )个时长,此时最优充电时段范围为[Jb ,Jb +Jc ]。
该方法计算简单,对设备的硬件要求较低,得到的最优充电时段范围保留了满足用户充电费用最少的所有最优解,将最优充电时段范围作为本地运营商优化的约束条件,能够减少本地运营商优化的计算量。
4 基于改进粒子群算法的本地运营商优化模型求解
4.1 粒子群算法
粒子群算法主要模拟了鸟群寻找食物的过 程,在鸟群搜寻过程中,每只鸟知道食物离自己的距离,但不知道食物的具体位置,为了获得食物,鸟儿们会共享自己的位置信息,找出离食物最近的鸟儿位置,并向着那个位置靠近,整个过程中鸟群会在离食物最近的位置周围搜索,直到找到食物。
(7) $X_{ij}^{t{\text{ + }}1} = X_{ij}^t + V_{ij}^t$
式中,Xt ij 、Vt ij 分别为第t 次迭代时第i 个粒子在j 维的位置与速度。
(8) $V_{ij}^{t{\text{ + }}1} = w \cdot V_{ij}^t + {c_1} \cdot rand \cdot X_{Sp,ij}^t + {c_2} \cdot rand \cdot X_{Sg,j}^t\;\;$
式中,w 为权重;c 1 、c 2 为学习因子;rand 为[0, 1]之间的随机数;Xt Sp,ij 为第t 次迭代时j 维中第i 个粒子与自身历史最优位置Xpbest , ij Xt Sg,j 为第t 次迭代时j 维中第i 个粒子与全局最优位置Xgbest,j 的距离,计算公式如式(10)所示
(9) $X_{Sp,ij}^t{\text{ = }}{X_{pbest,ij}} - X_{ij}^t$
(10) $X_{Sg,ij}^t{\text{ = }}{X_{gbest,j}} - X_{ij}^t$
4.2 改进粒子群算法
混沌映射具有较好的遍历性,常被用于解决算法的搜索问题,常用的混沌模型主要有Logistic模型和Cubic模型,相关研究表明Tent混沌映射比Logistic混沌映射具有更好的混沌特性[13 ] ,因此本文将Tent混沌映射引入到种群的初始化上,用混沌映射生成的序列替代rand()随机数。Tent混沌映射模型如式(11)所示
(11) ${Z_{k{\rm{ + 1,}}\;j}}{\rm{ = }}\left\{ \begin{array}{l}2{Z_{k,j}}\;\;\;\;\;\;\;\;\;\;\;\;\;\;0 \le {Z_{k,\;j}} \le 0.5\\2(1 - {Z_{k{\rm{ + 1,}}\;j}})\;\;\;\;\;0.5 < {Z_{k,\;j}} \le 1\;\;\;\;\;\;\;\;\;\end{array} \right.$
式中,k 为迭代次数,k =0, 1, 2, …, N ;Zk+ 1, j k +1次迭代后映射在j 维上的混沌变量,当k =0时,Z 0, j
Tent映射的序列中存在着不动点与周期循环点,若Zk , j Zk , j Zk+m , j m ={1, 2, 3, 4}),序列最终将陷入周期循环。为此当出现以上情况时,Tent混沌映射模型更改为式(12)的形式
(12) ${Z_{k{\text{ + 1,}}\;j}}{\text{ = }}{Z_{k,j}} + 0.1 \cdot rand\left( {0,1} \right)$
粒子种群经混沌映射后的初始位置如式(13)所示,初始速度如(14)所示
(13) ${X_{i,j}} = {X_{lb,j}} + {Z_{i,j}} \cdot \left( {{X_{ub,j}} - {X_{lb,j}}} \right)$
式中,Xub , j Xlb , j j 维的上下界。
(14) ${V_{i,j}} = {V_{\min,j}} + {Z_{i,j}} \cdot \left( {{V_{\max,j}} - {V_{\min,j}}} \right)$
式中,V max, j V min, j j 维的最大、最小速度。
粒子群算法的搜索过程主要取决于粒子速度的大小,为了提高算法前期的全局搜索能力、加快算法后期的收敛速度,将速度更新中的权重w 调整为随迭代次数变化的动态值,使得w 在算法前期较大,有利于算法的全局搜索,在算法后期较小,提高算法的收敛速度。w 的计算公式如式(15)所示
(15) $w = {w_{\max }} - ({w_{\max }} - {w_{\min }}) \cdot {(\frac{t}{{{t_{\max }}}})^{1/t}}$
Levy飞行因其独特的移动方式在算法优化上得到了大量的应用,其步长服从莱维分布,在搜索路径上具有短距离飞行与偶尔长距离飞行的特点,研究表明Levy飞行能够帮助种群扩大搜索范围,提高算法的优化性能[14 ,15 ] ,Levy飞行的简单数学模型如式(16)所示
(16) $\left\{ \begin{array}{l}{\rm{Lev}}{{\rm{y}}_\beta } = \frac{\mu }{{{{\left| \nu \right|}^{1/\beta }}}}\\\mu N(0,{\sigma _\mu }^2)\;\;\;\;\;\;\;\nu N(0,{\sigma _\nu }^2)\\{\sigma _\mu } = \left\{ {\frac{{\Gamma (1 + \beta )\sin (\frac{{{\rm{\pi }}\beta }}{2})}}{{\beta \cdot \Gamma \left[ {\frac{{(1 + \beta )}}{2}} \right] \cdot {2^{\frac{{(\beta - 1)}}{2}}}}}} \right\}\\{\sigma _\nu } = 1\end{array} \right.$
式中,Levyβ β 为常数,一般设为1.5;$\Gamma$是伽马函数。
为了进一步增强算法的寻优能力,本文将Levy飞行机制引入到粒子的位置更新中。在每次迭代结束后利用Levy飞行步长扰动粒子位置,扰动后的粒子位置如式(17)所示
(17) ${X_{{\text{new}},ij}} = {X_{i,j}} + \alpha \left( {{X_{gbest,j}} - {X_{i,j}}} \right) \cdot L{\text{e}}v{y_{\beta,ij}}$
Levy飞行扰动可以增加粒子种群的多样性,但可能导致扰动后粒子的适应度变差,为此引入贪婪策略,将扰动后粒子的适应度f (X new ,i f (Xi )进行比较,选取适应度较好的位置,如式(18)所示
(18) ${X_{i,j}}{\rm{ = }}\left\{ \begin{array}{l}{X_{{\rm{new}},ij}}\;\;\;\;\;\;f({X_{{\rm{new}},i}}) \le f({X_i})\\{X_{i,j}}\;\;\;\;\;\;\;\;\;f({X_{{\rm{new}},i}}) > f({X_i})\end{array} \right.$
4.3 改进粒子群算法的优化流程
通过改进的粒子群算法求解本地运营商优化模型,步骤如下所示。
(1) 设置算法参数,根据式(13)、式(14)初始化粒子的位置、速度。
(2) 根据式(4)计算每个粒子的适应度,记录每个粒子历史适应度最好的位置与种群中全局适应度最好的位置。
(3) 根据式(7)、式(8)更新粒子位置、速度。
(4) 根据式(17)对粒子进行扰动,并根据式(18)决定粒子是否更新位置。
(5) 若循环次数达到最大迭代次数则输出最优解,若不满足则返回步骤(2)。
5 仿真结果分析
5.1 算例描述
本文的仿真试验在Windows10PC机(2.6 GHZ,4 GB,双核CPU),Matlab R2014b版本上进行,参数设置如下。
电动汽车的电池容量在20~40 kW·h均匀分布,充电功率为3 kW,用户的期望SOC均为1,电动汽车接入充电桩时间T o 、预计离开充电桩时间T g 满足正态分布[15 ] ,T o ~N (17.47,3.412 ),T g ~N (8.92,3.242 );日行驶里程D 满足对数正态分布[16 ] ,ln(D )~N (2.98,1.14)。
改进粒子群算法的种群数量为30,最大迭代次数t max 为200,速度权重最大值W max 设为0.9、最小值W min 设为0.3,学习因子c 1 、c 2 设为2。
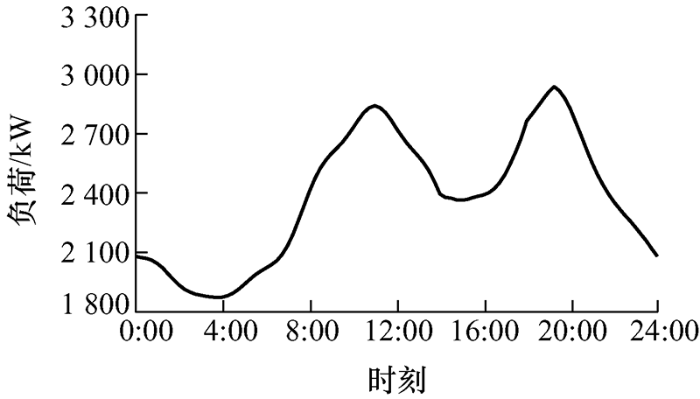
图2 为某区域配电网常规负荷曲线,11点和19点左右有两个负荷高峰,负荷最大值为2 932 kW。
图2
电动汽车充电电价采用峰谷电价[17 ] ,如表1 所示。
5.2 仿真结果与分析
用户在车辆充电前根据充电桩提供的充电时间范围及充电费用选择是否服从充电计划,若用户不服从,则充电立即开始。由于用户的主观意愿不能掌控,在进行电动汽车充电负荷模拟仿真时,有必要引入用户对充电计划的响应度r (服从充电安排的用户人数占所有用户的比例)来分析不同响应度下的电动汽车优化情况。当r =0%时(电动汽车无序充电),车辆接入充电桩后立即充电,采用蒙特卡洛法根据T o 、T g 、D 的概率密度分布随机生成用户信息,以接入充电桩时段Jb 为充电起始时段,根据式(19)计算得到r =0%时时段j 的车辆充电负荷Ps , j
(19) ${P_{s,j}} = \sum\limits_i^N {{P_{i,j}}}$
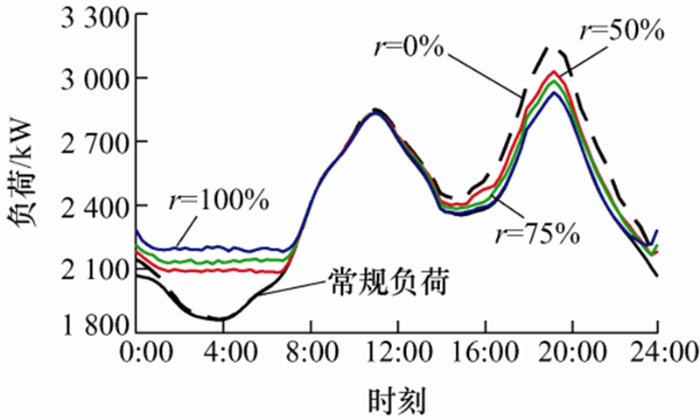
当300辆电动汽车接入充电桩后,用户不同响应度下的配电网总负荷曲线如图3 所示。
图3
从图3 可以看出当r =0%时,电动汽车主要集中在17:00—22:00充电,导致配电网的峰值负荷进一步增大,负荷波动更加剧烈;当r =50%时,17:00—22:00的配电网总负荷明显下降,电动汽车充电负荷开始转移到00:00—08:00时段;当r =100%时,电动汽车充电负荷的转移效果较好,负荷峰值明显降低,负荷曲线更加平稳。
表2 为不同用户响应度下的优化结果,可以看出当r 从0%到100%时,配电网负荷峰谷差降低了42.3%,负荷方差下降了59.7%,用户总充电费用下降了27.5%。
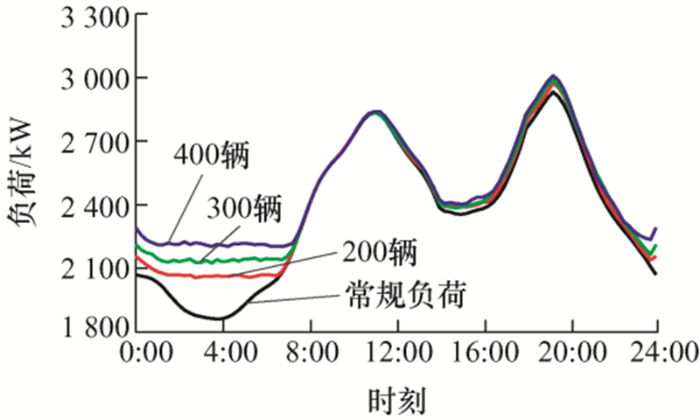
在实际系统中,大多数人会服从充电计划以便减少自身的充电费用,但部分人可能急需用车,需要车辆更早地结束充电,为此将用户响应度定为75%,分析该响应度下不同充电数量对优化结果的影响,当200辆、300辆、400辆电动汽车接入充电桩后,不同充电数量下的配电网总负荷曲线如图4 所示。
图4
从图4 可以看出,随着优化车辆的增加,配电网峰值、谷值负荷逐渐变大,但峰值负荷增大幅度较小,因此负荷曲线将会更加平稳。
表3 为不同充电数量下的优化结果,可以看出随着充电数量的增大,配电网负荷峰谷差、方差逐渐减小,说明车辆的充电数量越多,本文所提策略的优化效果越好。
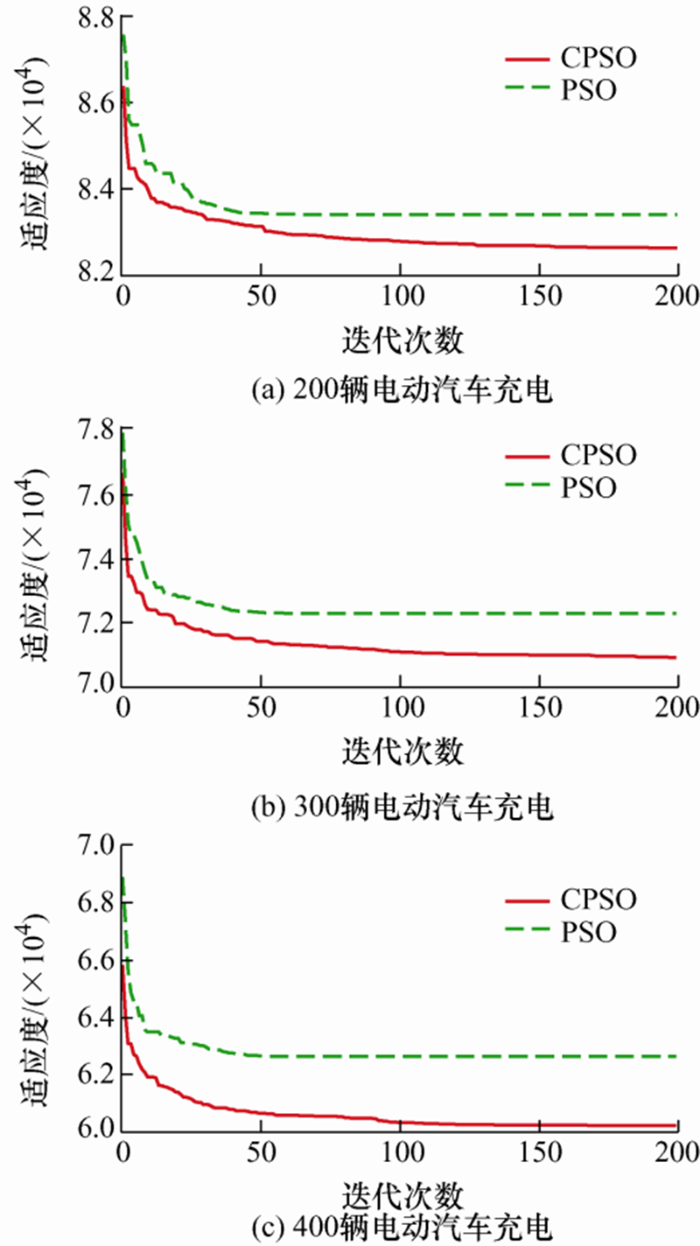
为了体现本文算法改进的有效性,将改进后的粒子群算法(CPSO)与原始粒子群算法(PSO)比较,PSO的种群数量、迭代次数、学习因子与CPSO设置一致,权重设为0.6,将PSO算法用在200、300、400辆电动汽车的充电优化中,用户响应度设为75%,各算法的收敛曲线如图5 所示。
图5
从图5 可以看出改进PSO算法能够有效提升算法的精度,随着充电数量的增加,CPSO算法的全局搜索能力越强,能够有效地跳出局部最优解,更有利于电动汽车的充电优化。
6 结论
本文分析了电动汽车不同充电情况下对电网负荷波动的影响,建立了考虑用户充电费用、配电网总负荷方差的电动汽车充电分层优化模型,利用改进的粒子群算法对目标进行了优化,由仿真结果得到如下结论。
(1) 随着用户响应度、充电数量的增大,电动汽车充电的优化效果越好,优化后的车辆充电时段大都分布在配电网负荷低谷期,有效地减小了配电网的负荷波动以及用户充电成本。
(2) 改进的粒子群算法具有较好的全局搜索能力,能够有效地提高算法的收敛精度,相较于原始粒子群算法,改进粒子群算法能够较好地解决电动汽车的充电优化问题。
参考文献
View Option
[1]
中华人民共和国国务院 . 节能与新能源汽车产业发展规划(2012-2020年)
[R/OL]. [2012 -06-28]. .
URL
[本文引用: 1]
The State Council of the People’s Republic of China . Energy-saving and new energy automobile industry development plan(2012-2020)
[R/OL]. [2012 -06-28]. .
URL
[本文引用: 1]
[2]
王斐 , 李正烁 , 叶萌 , 等 . 电动汽车充电对电网的影响及优化调度研究述评
[J]. 南方电网技术 , 2016 , 10 (6 ):70 -80 .
[本文引用: 1]
WANG Fei LI Zhengshuo YE Meng , et al . Review on research of impact of electric vehicles charging on power grids and its optimal dispatch
[J]. Southern Power System Technology , 2016 , 10 (6 ):70 -80 .
[本文引用: 1]
[3]
马玲玲 , 杨军 , 付聪 , 等 . 电动汽车充放电对电网影响研究综述
[J]. 电力系统保护与控制 , 2013 , 41 (3 ):140 -148 .
[本文引用: 1]
MA Lingling YANG Jun FU Cong , et al . Review on impact of electric car charging and discharging on power grid
[J]. Power System Protection and Control , 2013 , 41 (3 ):140 -148 .
[本文引用: 1]
[4]
SORTOMME E HINDI M M MACPHERSON S D J , et al . Coordinated charging of plug-in hybrid electric vehicle to minimize distribution system losses
[J]. IEEE Transactions on Smart Grid , 2011 , 2 (1 ):186 -193 .
[本文引用: 1]
[5]
占恺峤 , 宋永华 , 胡泽春 , 等 . 以降损为目标的电动汽车有序充电优化
[J]. 中国电机工程学报 , 2012 , 32 (31 ):11 -18 .
[本文引用: 1]
ZHAN Kaiqiao SONG Yonghua HU Zechun , et al . Coordination of electric vehicles charging to minimize active power losses
[J]. Proceedings of the CSEE , 2012 , 32 (31 ):11 -18 .
[本文引用: 1]
[6]
ZOU S MA Z LIU X , et al . An efficient game for coordinating electric vehicle charging
[J]. IEEE Transactions on Automatic Control , 2017 , 62 (5 ):2374 -2389 .
DOI:10.1109/TAC.2016.2614106
URL
[本文引用: 1]
[7]
SORTOMME E EL-SHARKAWI M A . Optimal combined bidding of vehicle-to-grid ancillary services
[J]. IEEE Transactions on Smart Grid , 2012 , 3 (1 ):70 -79 .
DOI:10.1109/TSG.2011.2170099
URL
[本文引用: 1]
[8]
SORTOMME E EL-SHARKAWI M A . Optimal scheduling of vehicle-to-grid energy and ancillary services
[J]. IEEE Transactions on Smart Grid , 2012 , 3 (1 ):351 -359 .
DOI:10.1109/TSG.2011.2164099
URL
[本文引用: 1]
[10]
曹一家 , 刘易珠 , 阙凌燕 , 等 , 换电站与电网协调的多目标双层实时充放电调度方法
[J]. 电力自动化设备 , 2015 , 35 (4 ):1 -7 .
[本文引用: 1]
CAO Yijia LIU Yizhu QUE Lingyan , et al . Multi-objective bi-level real-time charging/discharging dispatch with coordination of BSS and grid
[J]. Electric Power Automation Equipment , 2015 , 35 (4 ):1 -7 .
[本文引用: 1]
[11]
何西 , 涂春鸣 , 王丽丽 , 等 . 考虑用户行车习惯的电动汽车充电双层控制策略
[J]. 电力系统自动化 , 2018 , 42 (3 ):64 -69 .
[本文引用: 1]
HE Xi TU Chunming WANG Lili , et al . Double-layer charging strategy for electric vehicles considering users’ driving patterns
[J]. Automation of Electric Power Systems , 2018 , 42 (3 ):64 -69 .
[本文引用: 1]
[12]
黄贵鸿 , 雷霞 , 杨毅 , 等 . 考虑风电与用户满意度的电动汽车两层智能充放电策略
[J]. 电工技术学报 , 2015 , 30 (5 ):85 -97 .
[本文引用: 1]
HUANG Guihong LEI Xia YANG Yi , et al . Two-layer smart charge-discharge strategies for electric vehicles considering wind generation and user’s satisfaction
[J]. Transactions of China Electrotechnical Society , 2015 , 30 (5 ):85 -97 .
[本文引用: 1]
[13]
王瑞琪 , 张承慧 , 李珂 . 基于改进混沌优化的多目标遗传算法
[J]. 控制与决策 , 2011 , 26 (9 ):1391 -1397 .
[本文引用: 1]
WANG Ruiqi ZHANG Chenghui LI Ke . Muti-objective genetic algorithm based on improved chaotic optimization
[J]. Control and Decision , 2011 , 26 (9 ):1391 -1397 .
[本文引用: 1]
[14]
李阳 , 李维刚 , 赵云涛 , 等 . 基于莱维飞行和随机游动策略的灰狼算法
[J]. 计算机科学 , 2020 , 47 (8 ):291 -296 .
[本文引用: 1]
LI Yang LI Weigang ZHAO Yuntao , et al . Grey wolf algorithm based on Levy flight and random walk strategy
[J]. Computer Science , 2020 , 47 (8 ):291 -296 .
[本文引用: 1]
[15]
于建芳 , 刘升 , 王俊杰 , 等 . 融合莱维飞行与黄金正弦的蚁狮优化算法
[J]. 计算机应用研究 , 2020 , 37 (8 ):2349 -2353 .
[本文引用: 2]
YU Jianfang LIU Sheng WANG Junjie , et al . Antlion optimization algorithm integrating with Levy flight and golden sine
[J]. Application Research of Computers , 2020 , 37 (8 ):2349 -2353 .
[本文引用: 2]
[16]
杨冰 , 王丽芳 , 廖承林 , 等 . 分布式电动汽车有序充电控制系统模型
[J]. 电力系统自动化 , 2015 , 39 (20 ):41 -46 .
[本文引用: 1]
YANG Bing WANG Lifang LIAO Chenglin , et al . Distributed coordinated charging control system model for large-scale electric vehicles
[J]. Automation of Electric Power Systems , 2015 , 39 (20 ):41 -46 .
[本文引用: 1]
[17]
齐先军 , 李冬伟 , 纪姝彦 . 采用功率限制的住宅区电动汽车有序充电控制策略
[J]. 电网技术 , 2016 , 40 (12 ):3715 -3721 .
[本文引用: 1]
QI Xianjun LI Dongwei JI Shuyan . A coordinated charging control strategy for electric vehicles in residential area with power limitation
[J]. Power System Technology , 2016 , 40 (12 ):3715 -3721
[本文引用: 1]
节能与新能源汽车产业发展规划(2012-2020年)
1
2012
... 电动汽车作为一种新能源汽车,具有高效、清洁的特点,在缓解能源短缺、减轻环境污染等方面具有较大的优势,目前已成为世界各国的战略发展目标,我国“十二五”规划明确指出将电动汽车行业作为未来战略发展目标,预计在2030年每年生产1 500万辆电动汽车[1 ] . ...
节能与新能源汽车产业发展规划(2012-2020年)
1
2012
... 电动汽车作为一种新能源汽车,具有高效、清洁的特点,在缓解能源短缺、减轻环境污染等方面具有较大的优势,目前已成为世界各国的战略发展目标,我国“十二五”规划明确指出将电动汽车行业作为未来战略发展目标,预计在2030年每年生产1 500万辆电动汽车[1 ] . ...
电动汽车充电对电网的影响及优化调度研究述评
1
2016
... 大规模的电动汽车充电会给配电网的安全运行带来挑战,若不进行适当的调控,配电网负荷波动将会加剧,并带来设备过载、电压功率因数下降等不良影响[2 ,3 ] . ...
电动汽车充电对电网的影响及优化调度研究述评
1
2016
... 大规模的电动汽车充电会给配电网的安全运行带来挑战,若不进行适当的调控,配电网负荷波动将会加剧,并带来设备过载、电压功率因数下降等不良影响[2 ,3 ] . ...
电动汽车充放电对电网影响研究综述
1
2013
... 大规模的电动汽车充电会给配电网的安全运行带来挑战,若不进行适当的调控,配电网负荷波动将会加剧,并带来设备过载、电压功率因数下降等不良影响[2 ,3 ] . ...
电动汽车充放电对电网影响研究综述
1
2013
... 大规模的电动汽车充电会给配电网的安全运行带来挑战,若不进行适当的调控,配电网负荷波动将会加剧,并带来设备过载、电压功率因数下降等不良影响[2 ,3 ] . ...
Coordinated charging of plug-in hybrid electric vehicle to minimize distribution system losses
1
2011
... 为了保证配电网的安全运行,减小电动汽车无序充电带来的影响,国内外学者开展了电动汽车充电优化策略的研究.目前电动汽车的充电优化策略主要分为集中式充电优化方式和分层充电优化方式两种.其中,集中式充电优化方式是根据建立的充电优化模型对当前时段接入的所有电动汽车进行集中式优化,这个过程通常由控制中心独立完成.文献[4 ,5 ]提出了以配电网网损最小为目标的充电优化方法;文献[6 ]针对配电网的负荷波动,将配电网高峰时段的充电负荷转移至夜间低谷期,减少了配电网的负荷峰谷差;文献[7 ,8 ]以电网购电成本最小为目标,优化电动汽车的最优充放电时段.上述文献都是通过集中式充电优化的方法来调控电动汽车的充电时段,但这种优化方式的计算量较大,通常需要大量的信息传递,不利于电动汽车充电的实时 优化. ...
以降损为目标的电动汽车有序充电优化
1
2012
... 为了保证配电网的安全运行,减小电动汽车无序充电带来的影响,国内外学者开展了电动汽车充电优化策略的研究.目前电动汽车的充电优化策略主要分为集中式充电优化方式和分层充电优化方式两种.其中,集中式充电优化方式是根据建立的充电优化模型对当前时段接入的所有电动汽车进行集中式优化,这个过程通常由控制中心独立完成.文献[4 ,5 ]提出了以配电网网损最小为目标的充电优化方法;文献[6 ]针对配电网的负荷波动,将配电网高峰时段的充电负荷转移至夜间低谷期,减少了配电网的负荷峰谷差;文献[7 ,8 ]以电网购电成本最小为目标,优化电动汽车的最优充放电时段.上述文献都是通过集中式充电优化的方法来调控电动汽车的充电时段,但这种优化方式的计算量较大,通常需要大量的信息传递,不利于电动汽车充电的实时 优化. ...
以降损为目标的电动汽车有序充电优化
1
2012
... 为了保证配电网的安全运行,减小电动汽车无序充电带来的影响,国内外学者开展了电动汽车充电优化策略的研究.目前电动汽车的充电优化策略主要分为集中式充电优化方式和分层充电优化方式两种.其中,集中式充电优化方式是根据建立的充电优化模型对当前时段接入的所有电动汽车进行集中式优化,这个过程通常由控制中心独立完成.文献[4 ,5 ]提出了以配电网网损最小为目标的充电优化方法;文献[6 ]针对配电网的负荷波动,将配电网高峰时段的充电负荷转移至夜间低谷期,减少了配电网的负荷峰谷差;文献[7 ,8 ]以电网购电成本最小为目标,优化电动汽车的最优充放电时段.上述文献都是通过集中式充电优化的方法来调控电动汽车的充电时段,但这种优化方式的计算量较大,通常需要大量的信息传递,不利于电动汽车充电的实时 优化. ...
An efficient game for coordinating electric vehicle charging
1
2017
... 为了保证配电网的安全运行,减小电动汽车无序充电带来的影响,国内外学者开展了电动汽车充电优化策略的研究.目前电动汽车的充电优化策略主要分为集中式充电优化方式和分层充电优化方式两种.其中,集中式充电优化方式是根据建立的充电优化模型对当前时段接入的所有电动汽车进行集中式优化,这个过程通常由控制中心独立完成.文献[4 ,5 ]提出了以配电网网损最小为目标的充电优化方法;文献[6 ]针对配电网的负荷波动,将配电网高峰时段的充电负荷转移至夜间低谷期,减少了配电网的负荷峰谷差;文献[7 ,8 ]以电网购电成本最小为目标,优化电动汽车的最优充放电时段.上述文献都是通过集中式充电优化的方法来调控电动汽车的充电时段,但这种优化方式的计算量较大,通常需要大量的信息传递,不利于电动汽车充电的实时 优化. ...
Optimal combined bidding of vehicle-to-grid ancillary services
1
2012
... 为了保证配电网的安全运行,减小电动汽车无序充电带来的影响,国内外学者开展了电动汽车充电优化策略的研究.目前电动汽车的充电优化策略主要分为集中式充电优化方式和分层充电优化方式两种.其中,集中式充电优化方式是根据建立的充电优化模型对当前时段接入的所有电动汽车进行集中式优化,这个过程通常由控制中心独立完成.文献[4 ,5 ]提出了以配电网网损最小为目标的充电优化方法;文献[6 ]针对配电网的负荷波动,将配电网高峰时段的充电负荷转移至夜间低谷期,减少了配电网的负荷峰谷差;文献[7 ,8 ]以电网购电成本最小为目标,优化电动汽车的最优充放电时段.上述文献都是通过集中式充电优化的方法来调控电动汽车的充电时段,但这种优化方式的计算量较大,通常需要大量的信息传递,不利于电动汽车充电的实时 优化. ...
Optimal scheduling of vehicle-to-grid energy and ancillary services
1
2012
... 为了保证配电网的安全运行,减小电动汽车无序充电带来的影响,国内外学者开展了电动汽车充电优化策略的研究.目前电动汽车的充电优化策略主要分为集中式充电优化方式和分层充电优化方式两种.其中,集中式充电优化方式是根据建立的充电优化模型对当前时段接入的所有电动汽车进行集中式优化,这个过程通常由控制中心独立完成.文献[4 ,5 ]提出了以配电网网损最小为目标的充电优化方法;文献[6 ]针对配电网的负荷波动,将配电网高峰时段的充电负荷转移至夜间低谷期,减少了配电网的负荷峰谷差;文献[7 ,8 ]以电网购电成本最小为目标,优化电动汽车的最优充放电时段.上述文献都是通过集中式充电优化的方法来调控电动汽车的充电时段,但这种优化方式的计算量较大,通常需要大量的信息传递,不利于电动汽车充电的实时 优化. ...
Coordination of PEVS charging across multiple aggregators
1
2014
... 针对电动汽车集中式充电优化方式计算量大、通信要求高的问题,相关文献开展了电动汽车分层充电优化方式的研究.在分层充电优化方式中,代理商起到连接电动汽车与控制中心的作用,控制信号先由控制中心发送至本地代理商,再由代理商将信号分发至每辆电动汽车,这种控制方式降低了通信难度,更适用于电动汽车的实时调度.文献[9 ]提出一种由代理商分散控制的充电管理方式,代理商负责计算区域内电动汽车的充电负荷曲线,控制中心再对各区域的电动汽车进行协调控制;文献[10 ]针对配电网负荷波动,提出了上层以减少负荷波动为目标、下层以上下层调度偏差最小为目标的双层优化模型.上述文献考虑了配电网的利益,但忽略了用户的充电成本,且认为所有的用户均愿意服从充电安排. ...
换电站与电网协调的多目标双层实时充放电调度方法
1
2015
... 针对电动汽车集中式充电优化方式计算量大、通信要求高的问题,相关文献开展了电动汽车分层充电优化方式的研究.在分层充电优化方式中,代理商起到连接电动汽车与控制中心的作用,控制信号先由控制中心发送至本地代理商,再由代理商将信号分发至每辆电动汽车,这种控制方式降低了通信难度,更适用于电动汽车的实时调度.文献[9 ]提出一种由代理商分散控制的充电管理方式,代理商负责计算区域内电动汽车的充电负荷曲线,控制中心再对各区域的电动汽车进行协调控制;文献[10 ]针对配电网负荷波动,提出了上层以减少负荷波动为目标、下层以上下层调度偏差最小为目标的双层优化模型.上述文献考虑了配电网的利益,但忽略了用户的充电成本,且认为所有的用户均愿意服从充电安排. ...
换电站与电网协调的多目标双层实时充放电调度方法
1
2015
... 针对电动汽车集中式充电优化方式计算量大、通信要求高的问题,相关文献开展了电动汽车分层充电优化方式的研究.在分层充电优化方式中,代理商起到连接电动汽车与控制中心的作用,控制信号先由控制中心发送至本地代理商,再由代理商将信号分发至每辆电动汽车,这种控制方式降低了通信难度,更适用于电动汽车的实时调度.文献[9 ]提出一种由代理商分散控制的充电管理方式,代理商负责计算区域内电动汽车的充电负荷曲线,控制中心再对各区域的电动汽车进行协调控制;文献[10 ]针对配电网负荷波动,提出了上层以减少负荷波动为目标、下层以上下层调度偏差最小为目标的双层优化模型.上述文献考虑了配电网的利益,但忽略了用户的充电成本,且认为所有的用户均愿意服从充电安排. ...
考虑用户行车习惯的电动汽车充电双层控制策略
1
2018
... 文献[11 ]建立了双层充电优化模型,上层模型以全局利益为目标,为下层模型提供约束条件,下层模型以各节点充电费用和充电偏差最小为目标,将各节点对上层控制所得功率指导结果为约束条件,采用交替方向乘子法求解目标函数,各个节点之间不断协调合作,从而得到单个电动汽车充电时段的最优解,该方法需要大量的信息传递,因此对通信的要求较高;文献[12 ]引入分层分区的理念,上层采用粒子群算法优化各时段的总充放电功率,下层采用顺序选择法保障用户的充电满意度,粒子群算法在处理大规模的优化问题时容易受到种群多样性的影响,出现陷入局部最优的情况,导致优化效果较差. ...
考虑用户行车习惯的电动汽车充电双层控制策略
1
2018
... 文献[11 ]建立了双层充电优化模型,上层模型以全局利益为目标,为下层模型提供约束条件,下层模型以各节点充电费用和充电偏差最小为目标,将各节点对上层控制所得功率指导结果为约束条件,采用交替方向乘子法求解目标函数,各个节点之间不断协调合作,从而得到单个电动汽车充电时段的最优解,该方法需要大量的信息传递,因此对通信的要求较高;文献[12 ]引入分层分区的理念,上层采用粒子群算法优化各时段的总充放电功率,下层采用顺序选择法保障用户的充电满意度,粒子群算法在处理大规模的优化问题时容易受到种群多样性的影响,出现陷入局部最优的情况,导致优化效果较差. ...
考虑风电与用户满意度的电动汽车两层智能充放电策略
1
2015
... 文献[11 ]建立了双层充电优化模型,上层模型以全局利益为目标,为下层模型提供约束条件,下层模型以各节点充电费用和充电偏差最小为目标,将各节点对上层控制所得功率指导结果为约束条件,采用交替方向乘子法求解目标函数,各个节点之间不断协调合作,从而得到单个电动汽车充电时段的最优解,该方法需要大量的信息传递,因此对通信的要求较高;文献[12 ]引入分层分区的理念,上层采用粒子群算法优化各时段的总充放电功率,下层采用顺序选择法保障用户的充电满意度,粒子群算法在处理大规模的优化问题时容易受到种群多样性的影响,出现陷入局部最优的情况,导致优化效果较差. ...
考虑风电与用户满意度的电动汽车两层智能充放电策略
1
2015
... 文献[11 ]建立了双层充电优化模型,上层模型以全局利益为目标,为下层模型提供约束条件,下层模型以各节点充电费用和充电偏差最小为目标,将各节点对上层控制所得功率指导结果为约束条件,采用交替方向乘子法求解目标函数,各个节点之间不断协调合作,从而得到单个电动汽车充电时段的最优解,该方法需要大量的信息传递,因此对通信的要求较高;文献[12 ]引入分层分区的理念,上层采用粒子群算法优化各时段的总充放电功率,下层采用顺序选择法保障用户的充电满意度,粒子群算法在处理大规模的优化问题时容易受到种群多样性的影响,出现陷入局部最优的情况,导致优化效果较差. ...
基于改进混沌优化的多目标遗传算法
1
2011
... 混沌映射具有较好的遍历性,常被用于解决算法的搜索问题,常用的混沌模型主要有Logistic模型和Cubic模型,相关研究表明Tent混沌映射比Logistic混沌映射具有更好的混沌特性[13 ] ,因此本文将Tent混沌映射引入到种群的初始化上,用混沌映射生成的序列替代rand()随机数.Tent混沌映射模型如式(11)所示 ...
基于改进混沌优化的多目标遗传算法
1
2011
... 混沌映射具有较好的遍历性,常被用于解决算法的搜索问题,常用的混沌模型主要有Logistic模型和Cubic模型,相关研究表明Tent混沌映射比Logistic混沌映射具有更好的混沌特性[13 ] ,因此本文将Tent混沌映射引入到种群的初始化上,用混沌映射生成的序列替代rand()随机数.Tent混沌映射模型如式(11)所示 ...
基于莱维飞行和随机游动策略的灰狼算法
1
2020
... Levy飞行因其独特的移动方式在算法优化上得到了大量的应用,其步长服从莱维分布,在搜索路径上具有短距离飞行与偶尔长距离飞行的特点,研究表明Levy飞行能够帮助种群扩大搜索范围,提高算法的优化性能[14 ,15 ] ,Levy飞行的简单数学模型如式(16)所示 ...
基于莱维飞行和随机游动策略的灰狼算法
1
2020
... Levy飞行因其独特的移动方式在算法优化上得到了大量的应用,其步长服从莱维分布,在搜索路径上具有短距离飞行与偶尔长距离飞行的特点,研究表明Levy飞行能够帮助种群扩大搜索范围,提高算法的优化性能[14 ,15 ] ,Levy飞行的简单数学模型如式(16)所示 ...
融合莱维飞行与黄金正弦的蚁狮优化算法
2
2020
... Levy飞行因其独特的移动方式在算法优化上得到了大量的应用,其步长服从莱维分布,在搜索路径上具有短距离飞行与偶尔长距离飞行的特点,研究表明Levy飞行能够帮助种群扩大搜索范围,提高算法的优化性能[14 ,15 ] ,Levy飞行的简单数学模型如式(16)所示 ...
... 电动汽车的电池容量在20~40 kW·h均匀分布,充电功率为3 kW,用户的期望SOC均为1,电动汽车接入充电桩时间T o 、预计离开充电桩时间T g 满足正态分布[15 ] ,T o ~N (17.47,3.412 ),T g ~N (8.92,3.242 );日行驶里程D 满足对数正态分布[16 ] ,ln(D )~N (2.98,1.14). ...
融合莱维飞行与黄金正弦的蚁狮优化算法
2
2020
... Levy飞行因其独特的移动方式在算法优化上得到了大量的应用,其步长服从莱维分布,在搜索路径上具有短距离飞行与偶尔长距离飞行的特点,研究表明Levy飞行能够帮助种群扩大搜索范围,提高算法的优化性能[14 ,15 ] ,Levy飞行的简单数学模型如式(16)所示 ...
... 电动汽车的电池容量在20~40 kW·h均匀分布,充电功率为3 kW,用户的期望SOC均为1,电动汽车接入充电桩时间T o 、预计离开充电桩时间T g 满足正态分布[15 ] ,T o ~N (17.47,3.412 ),T g ~N (8.92,3.242 );日行驶里程D 满足对数正态分布[16 ] ,ln(D )~N (2.98,1.14). ...
分布式电动汽车有序充电控制系统模型
1
2015
... 电动汽车的电池容量在20~40 kW·h均匀分布,充电功率为3 kW,用户的期望SOC均为1,电动汽车接入充电桩时间T o 、预计离开充电桩时间T g 满足正态分布[15 ] ,T o ~N (17.47,3.412 ),T g ~N (8.92,3.242 );日行驶里程D 满足对数正态分布[16 ] ,ln(D )~N (2.98,1.14). ...
分布式电动汽车有序充电控制系统模型
1
2015
... 电动汽车的电池容量在20~40 kW·h均匀分布,充电功率为3 kW,用户的期望SOC均为1,电动汽车接入充电桩时间T o 、预计离开充电桩时间T g 满足正态分布[15 ] ,T o ~N (17.47,3.412 ),T g ~N (8.92,3.242 );日行驶里程D 满足对数正态分布[16 ] ,ln(D )~N (2.98,1.14). ...
采用功率限制的住宅区电动汽车有序充电控制策略
1
2016
... 电动汽车充电电价采用峰谷电价[17 ] ,如表1 所示. ...
采用功率限制的住宅区电动汽车有序充电控制策略
1
2016
... 电动汽车充电电价采用峰谷电价[17 ] ,如表1 所示. ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}