It is necessary to take into account the speed of the system when researching the co-simulation coupling system. The linear recessive stabilization method can accelerate the simulation operation time under the premise of ensuring the stability of the system. The simulation efficiency and simulation accuracy can also be taken into account when researching the co-simulation coupling system. The engineering example under the FMI standard based on joint simulation also proves that this method makes the system have good stability and accuracy, and compared with the reference simulation, the system has higher simulation efficiency. For large-scale system modeling solutions in multiple fields, a simulation method based on the FMI universal interface standard is proposed. The modeling simulation verification of the FMI standard combined with the Dymola platform can be achieved using the method.
Keywords:Co-simulation
;
parallel system
;
stability
;
FMI
AI Fengming, FENG Shouhong, LIANG Xingzhuang, LI Weilin, LIN Qinzhou. Research on Joint Simulation Technology Based on Power Simulation. Journal of Electrical Engineering[J], 2021, 16(2): 159-165 doi:10.11985/2021.02.020
Dymola是一款基于Modelica语言的多领域仿真平台。Modelica语言可以实现各模块库之间的连接,进行多领域仿真。文献[1]通过Modelica语言搭建了包括交流发电机、变压整流器、电源系统接触器和过欠压、过欠频检测模块等部件的数字仿真模型和供电系统模型,并完成系统逻辑设计。通过特殊的接口,Dymola可以与多款软件实现联合仿真,现在国内外的主要研究方向为对电机的控制和汽车系统建模。文献[2]利用Simulink、CarSim、Dymola软件实现对负荷传感液压转向系统的联合仿真;Dymola符合FMI接口协议,所以可以输入输出FMU模型;文献[3]在Dymola中实现二极管模型的FMU模型输出;文献[4]在Dymola中实现热流体模型的FMU模型输出;文献[5]是对自动嵌入式物理模型的FMI研究;文献[6]将Modelica模型通过FMI输出到Excel表格中,通过FMI Toolbox for Matlab工具生成FMU模型,最后导入Dymola平台中进行联合仿真,实现控制器算法模型和Dymola整车联合仿真测试。
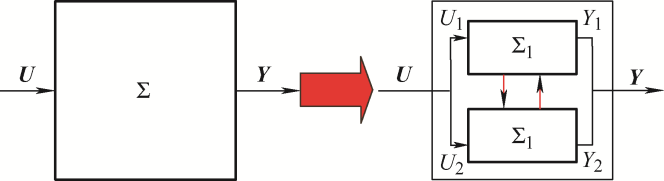
式中,$x\left( t \right)=\left( {{x}^{1}}\left( t \right),{{x}^{2}}\left( t \right),\cdots,{{x}^{N}}\left( t \right) \right)$表示N个子系统的状态变量集合,$u\left( t \right)=\left( {{u}^{1}}\left( t \right),{{u}^{2}}\left( t \right),\cdots,{{u}^{N}}\left( t \right) \right)$和$y\left( t \right)=\left( {{y}^{1}}\left( t \right),{{y}^{2}}\left( t \right),\cdots,{{y}^{N}}\left( t \right) \right)$分别表示子系统输入输出集合。
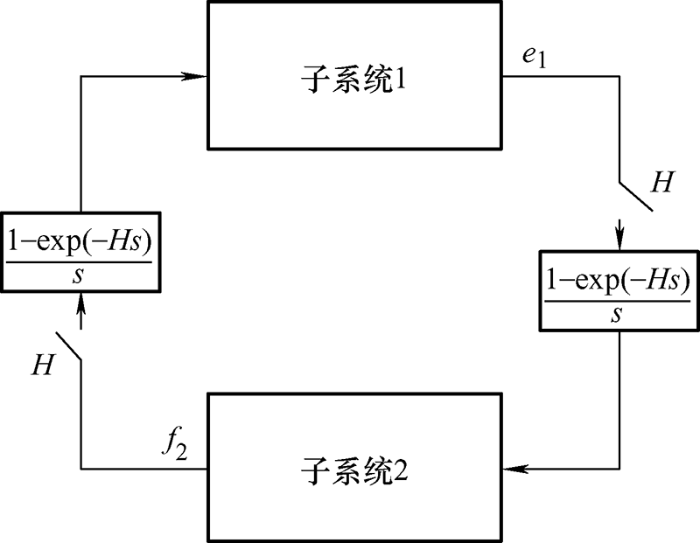
FMU求解器需要具有计算所有状态变量和所连的输入输出的方向导数的能力,在FMI协议中,通过标记“provide Direction Derivative”来说明,并通过方程“fmi Get Directional Derivative”来实现。稳定方法“基于模型的外推法”不与FMI提供的“基于历史的外推法”相兼容,所以属性“can Interpolate Inputs”需要扩展到其所指定的外推类型。
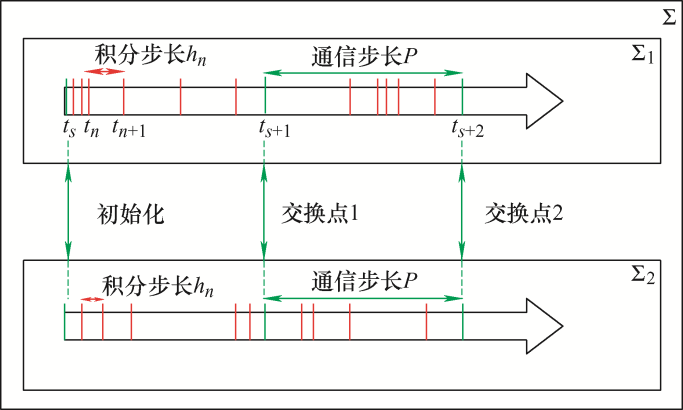
如果主求解器不支持稳定性,式(22)的右边会降为0,这样从求解器的实际输入将不变:如果没有设置标记“can Interpolate Inputs”,那么零阶保持器外推因主求解器不支持稳定性而在FMI协议中定义。这种情况下,通过主求解器在每一个通信节点$\left( {{t}_{k}},k=0,\cdots,M-1 \right)$调用方程“fmi Get Real”和“fmi Set Real”,每一个从求解器的输入是通过式(20)直接给出的,${{y}_{{\bar{s}}}}$是从求解器的输出,这些从求解器会求出第s个求解器的输入。
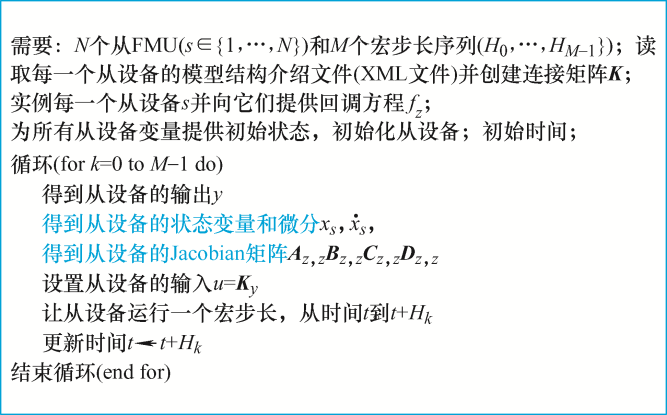
主求解器方面需要设置回调方程(Callback function),这个方程用于求解相连的从求解器的动态输入。在联合仿真之前,从求解器的模型结构信息将体现在准备矩阵和式(23)的计算中。随后,在联合仿真过程中,这些元素将会调用方程“fmi Get Continuous States”“fmi Get Derivatives”和“fmi Get Directional Derivatives”在每一次的信息交换节点上更新。当对式(21)、(23)数值积分时,系统通过从数值求解器调用这些方程。
A novel proposal on how to parameterize models in Dymola utilizing external files under consideration of a subsequent model export using the functional mock-up interface
[C]// Proceedings of the 11th International Modelica Conference,September 21-23,2015,Versailles,France, 2015:23-29.
Strong coupling of Modelica system-level models with detailed CFD models for transient simulation of hydraulic components in their surrounding environment
... Dymola是一款基于Modelica语言的多领域仿真平台.Modelica语言可以实现各模块库之间的连接,进行多领域仿真.文献[1]通过Modelica语言搭建了包括交流发电机、变压整流器、电源系统接触器和过欠压、过欠频检测模块等部件的数字仿真模型和供电系统模型,并完成系统逻辑设计.通过特殊的接口,Dymola可以与多款软件实现联合仿真,现在国内外的主要研究方向为对电机的控制和汽车系统建模.文献[2]利用Simulink、CarSim、Dymola软件实现对负荷传感液压转向系统的联合仿真;Dymola符合FMI接口协议,所以可以输入输出FMU模型;文献[3]在Dymola中实现二极管模型的FMU模型输出;文献[4]在Dymola中实现热流体模型的FMU模型输出;文献[5]是对自动嵌入式物理模型的FMI研究;文献[6]将Modelica模型通过FMI输出到Excel表格中,通过FMI Toolbox for Matlab工具生成FMU模型,最后导入Dymola平台中进行联合仿真,实现控制器算法模型和Dymola整车联合仿真测试. ...
基于Dymola软件及Modelica语言的飞机供电系统建模与仿真
1
2016
... Dymola是一款基于Modelica语言的多领域仿真平台.Modelica语言可以实现各模块库之间的连接,进行多领域仿真.文献[1]通过Modelica语言搭建了包括交流发电机、变压整流器、电源系统接触器和过欠压、过欠频检测模块等部件的数字仿真模型和供电系统模型,并完成系统逻辑设计.通过特殊的接口,Dymola可以与多款软件实现联合仿真,现在国内外的主要研究方向为对电机的控制和汽车系统建模.文献[2]利用Simulink、CarSim、Dymola软件实现对负荷传感液压转向系统的联合仿真;Dymola符合FMI接口协议,所以可以输入输出FMU模型;文献[3]在Dymola中实现二极管模型的FMU模型输出;文献[4]在Dymola中实现热流体模型的FMU模型输出;文献[5]是对自动嵌入式物理模型的FMI研究;文献[6]将Modelica模型通过FMI输出到Excel表格中,通过FMI Toolbox for Matlab工具生成FMU模型,最后导入Dymola平台中进行联合仿真,实现控制器算法模型和Dymola整车联合仿真测试. ...
Modeling and simulation of a hydraulic steering system
1
2008
... Dymola是一款基于Modelica语言的多领域仿真平台.Modelica语言可以实现各模块库之间的连接,进行多领域仿真.文献[1]通过Modelica语言搭建了包括交流发电机、变压整流器、电源系统接触器和过欠压、过欠频检测模块等部件的数字仿真模型和供电系统模型,并完成系统逻辑设计.通过特殊的接口,Dymola可以与多款软件实现联合仿真,现在国内外的主要研究方向为对电机的控制和汽车系统建模.文献[2]利用Simulink、CarSim、Dymola软件实现对负荷传感液压转向系统的联合仿真;Dymola符合FMI接口协议,所以可以输入输出FMU模型;文献[3]在Dymola中实现二极管模型的FMU模型输出;文献[4]在Dymola中实现热流体模型的FMU模型输出;文献[5]是对自动嵌入式物理模型的FMI研究;文献[6]将Modelica模型通过FMI输出到Excel表格中,通过FMI Toolbox for Matlab工具生成FMU模型,最后导入Dymola平台中进行联合仿真,实现控制器算法模型和Dymola整车联合仿真测试. ...
A novel proposal on how to parameterize models in Dymola utilizing external files under consideration of a subsequent model export using the functional mock-up interface
1
2015
... Dymola是一款基于Modelica语言的多领域仿真平台.Modelica语言可以实现各模块库之间的连接,进行多领域仿真.文献[1]通过Modelica语言搭建了包括交流发电机、变压整流器、电源系统接触器和过欠压、过欠频检测模块等部件的数字仿真模型和供电系统模型,并完成系统逻辑设计.通过特殊的接口,Dymola可以与多款软件实现联合仿真,现在国内外的主要研究方向为对电机的控制和汽车系统建模.文献[2]利用Simulink、CarSim、Dymola软件实现对负荷传感液压转向系统的联合仿真;Dymola符合FMI接口协议,所以可以输入输出FMU模型;文献[3]在Dymola中实现二极管模型的FMU模型输出;文献[4]在Dymola中实现热流体模型的FMU模型输出;文献[5]是对自动嵌入式物理模型的FMI研究;文献[6]将Modelica模型通过FMI输出到Excel表格中,通过FMI Toolbox for Matlab工具生成FMU模型,最后导入Dymola平台中进行联合仿真,实现控制器算法模型和Dymola整车联合仿真测试. ...
Design choices for thermo fluid flow components and systems that are exported as functional mockup units
1
2015
... Dymola是一款基于Modelica语言的多领域仿真平台.Modelica语言可以实现各模块库之间的连接,进行多领域仿真.文献[1]通过Modelica语言搭建了包括交流发电机、变压整流器、电源系统接触器和过欠压、过欠频检测模块等部件的数字仿真模型和供电系统模型,并完成系统逻辑设计.通过特殊的接口,Dymola可以与多款软件实现联合仿真,现在国内外的主要研究方向为对电机的控制和汽车系统建模.文献[2]利用Simulink、CarSim、Dymola软件实现对负荷传感液压转向系统的联合仿真;Dymola符合FMI接口协议,所以可以输入输出FMU模型;文献[3]在Dymola中实现二极管模型的FMU模型输出;文献[4]在Dymola中实现热流体模型的FMU模型输出;文献[5]是对自动嵌入式物理模型的FMI研究;文献[6]将Modelica模型通过FMI输出到Excel表格中,通过FMI Toolbox for Matlab工具生成FMU模型,最后导入Dymola平台中进行联合仿真,实现控制器算法模型和Dymola整车联合仿真测试. ...
FMI for physical models on automotive embedded targets
1
2015
... Dymola是一款基于Modelica语言的多领域仿真平台.Modelica语言可以实现各模块库之间的连接,进行多领域仿真.文献[1]通过Modelica语言搭建了包括交流发电机、变压整流器、电源系统接触器和过欠压、过欠频检测模块等部件的数字仿真模型和供电系统模型,并完成系统逻辑设计.通过特殊的接口,Dymola可以与多款软件实现联合仿真,现在国内外的主要研究方向为对电机的控制和汽车系统建模.文献[2]利用Simulink、CarSim、Dymola软件实现对负荷传感液压转向系统的联合仿真;Dymola符合FMI接口协议,所以可以输入输出FMU模型;文献[3]在Dymola中实现二极管模型的FMU模型输出;文献[4]在Dymola中实现热流体模型的FMU模型输出;文献[5]是对自动嵌入式物理模型的FMI研究;文献[6]将Modelica模型通过FMI输出到Excel表格中,通过FMI Toolbox for Matlab工具生成FMU模型,最后导入Dymola平台中进行联合仿真,实现控制器算法模型和Dymola整车联合仿真测试. ...
Automated deployment of modelica models in excel via functional mockup interface and integration with modeFRONTIER
1
2015
... Dymola是一款基于Modelica语言的多领域仿真平台.Modelica语言可以实现各模块库之间的连接,进行多领域仿真.文献[1]通过Modelica语言搭建了包括交流发电机、变压整流器、电源系统接触器和过欠压、过欠频检测模块等部件的数字仿真模型和供电系统模型,并完成系统逻辑设计.通过特殊的接口,Dymola可以与多款软件实现联合仿真,现在国内外的主要研究方向为对电机的控制和汽车系统建模.文献[2]利用Simulink、CarSim、Dymola软件实现对负荷传感液压转向系统的联合仿真;Dymola符合FMI接口协议,所以可以输入输出FMU模型;文献[3]在Dymola中实现二极管模型的FMU模型输出;文献[4]在Dymola中实现热流体模型的FMU模型输出;文献[5]是对自动嵌入式物理模型的FMI研究;文献[6]将Modelica模型通过FMI输出到Excel表格中,通过FMI Toolbox for Matlab工具生成FMU模型,最后导入Dymola平台中进行联合仿真,实现控制器算法模型和Dymola整车联合仿真测试. ...
Context-based polynomial extrapolation and slackened synchronization for fast multi-core simulation using FMI
Strong coupling of Modelica system-level models with detailed CFD models for transient simulation of hydraulic components in their surrounding environment



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}