

1 引言
随着城市化的进展,可使用的建筑土地越发有限,建筑物也逐渐向高层甚至超高层发展。世界最高的建筑物将达到甚至超过600 m[1]。因而,高效的电梯运输系统对这些超高层建筑至关重要。现有商业化的曳引式电梯系统在同一井道中最多运行两个轿厢[2],导致乘客等待时间长,极大地制约了电梯的运载能力。增加电梯的数量可以提高电梯运载能力,减少乘客等待时间,但电梯系统所占面积可高达建筑面积的40%[2],使得建筑物的经济性下降。此外,曳引式电梯通过缆绳连接轿厢、曳引机和配重,随着建筑高度的增长,缆绳长度和重量不断增加,缆绳消耗的能量以及带来的垂直震荡问题越发明显。当建筑高度达到一定程度,缆绳的机械强度必然不足,曳引式电梯也将不复适用。
无绳电梯所用直线电机主要有感应直线电机、同步直线电机和开关磁阻直线电机[5]。感应直线电机虽结构简单,但推力密度低、效率低、控制复杂,不适合电梯类长行程场合[6,7,8]。对比感应直线电机,永磁同步直线电机具有更高的推力密度和效率[9,10,11]。为了节约成本,一般永磁体贴在轿厢侧,铁心和电枢绕组沿井道铺设。ThyssenKrupp公司的MULTI系统采用的是两台双边无铁心永磁直线电机驱动轿厢[4]。随着井道高度的增加,电机成本会急剧增加。此外,为了提高无绳电梯载荷,文献[12,13]中提出采用超导同步直线电机,超导体和相关冷却装置位于轿厢侧。这增加了系统的复杂性。开关磁阻直线电机结构简单、可靠,成本低,所以文献[14,15,16]将双边开关磁阻直线电机应用于垂直驱动场合。然而,与感应直线电机类似,开关磁阻直线电机的推力密度不高。因此,探索一种结构简单可靠、成本低、推力密度高的直线电机,对无绳电梯驱动具有重要意义。
本文针对无绳电梯应用场合提出一种模块化细轭部磁通切换永磁直线(Modular thin yoke linear flux-switching permanent magnet,MTYLFSPM)电机并搭建驱动控制系统[23]。该电机是双定子结构,沿井道铺设,而初级动子采用模块化结构,置于电梯轿厢侧。文中将阐明所提出电机结构、工作原理以及极距比对电机性能的影响。以一台MTYLFSPM电机为例,基于Simulink建立该电机的模型、系统仿真模型,并进行模拟电梯上下运行仿真分析。最后,基于试验样机验证电机性能参数、电机模型准确性和进行电梯模拟运行试验。
2 电机结构和工作原理
本文提出的MTYLFSPM电机如图1所示。直线电机是双边结构,两块次级定子铁心将动子夹在中间。两块次级定子铁心错开半个定子极距τs/2用以增强气隙磁场和推力,同时削弱推力波动。动子由三个动子单元组成,每个动子单元构成电机的一相,其长度为2τm,即两倍的动子极距长。相邻模块间距离为λ1=(m±n/3)τs或者(m±n/6)τs,m、n是正整数。可以结合电机性能指标以及动子长度最小原则来确定m和n。三个动子单元中永磁体交替充磁,充磁方向平行于电机运动方向。特别强调的是,区别于传统FSPM电机,本文电机的动子铁心轭部不再是主磁路部分而是机械连接部件。轭部中所开安装孔是为了安装支撑杆,支撑整个动子,保证气隙均匀。在保证机械强度的前提下,轭部可以尽量做细。因而,本文称之为细轭部结构。
图1
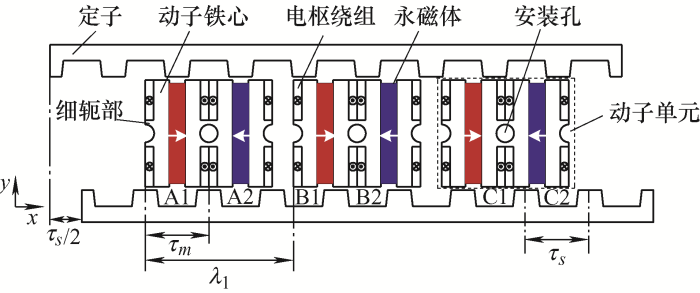
图2
表1 MTYLFSPM电机主要参数
| 参数 | 数值 | |
|---|---|---|
| 气隙大小/mm | 2 | |
| 动子极距τm/mm | 39 | |
| 定子极距τs/mm | 36 | |
| 电机高度/mm | 100 | |
| 动子轭部高/mm | 15 | |
| 安装孔半径/mm | 5 | |
| 电机叠厚/mm | 60 | |
图3
3 电机建模和控制策略
3.1 电机建模
值得说明的是,由于样机加工过程中没能很好地控制加工精度,导致电机气隙不均匀且各相动子单元在y方向上存在偏移。因此,针对τm/τs=6.5/6电机进行建模,考虑了这些加工误差因素。
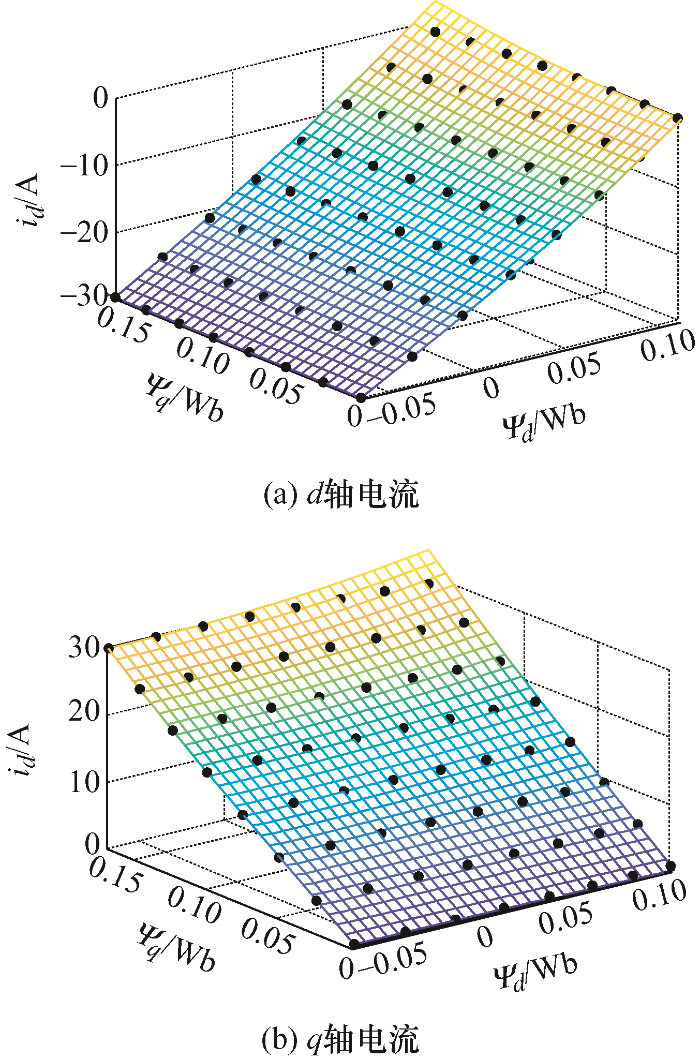
基于磁链的电机电压、推力方程为[26]
式中,Rs是相电阻,x是动子位移,Wm是电机内存储的磁能。d轴磁链ψd、q轴磁链ψq和Wm都与d轴电流id、q轴电流iq、动子位置角θ密切相关。
图4
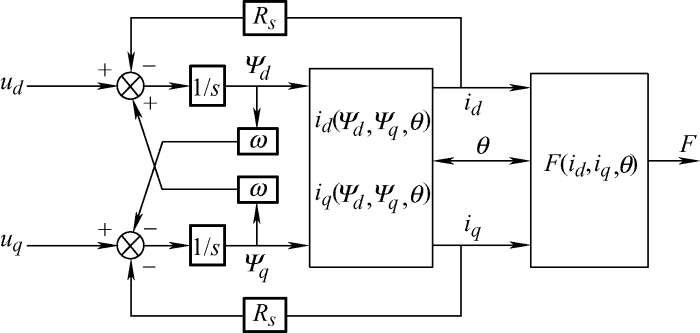
图5
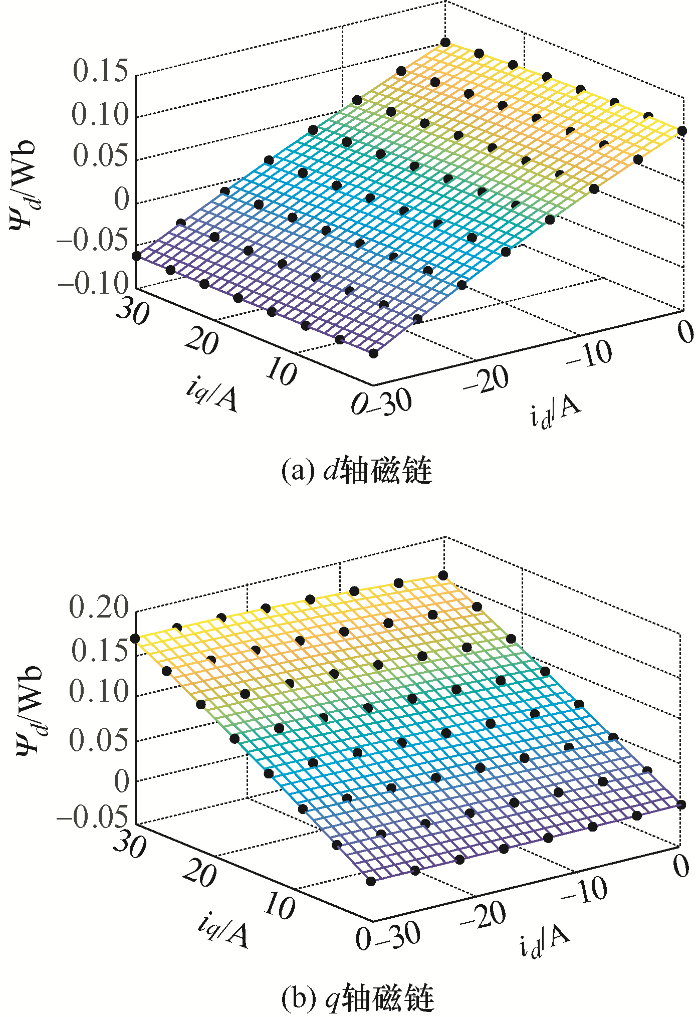
图6
为了得到式(2)所示推力方程,还需要ψd、ψq和Wm对x的导数。这里采用向后差分先求取ψd、ψq和Wm对x的导数,再建立对应的三维表格。图7是电机动子在一固定位置时,Wm随id、iq变化的曲面。
图7
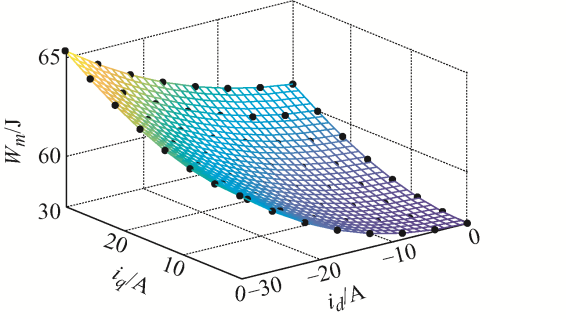
图8
此外,MTYLFSPM电机动子垂直运动时的机械运动方程可表示为
式中,m为计及负载的动子总质量,v为动子速度,g为重力加速度,D为黏滞摩擦因数,FD为黏滞摩擦力,FC为库仑摩擦力。当动子向上运行时,式(3)中“±”取“+”,而向下运行时取“-”。经试验测量,D约为46 N/(m/s),FC约为90 N。
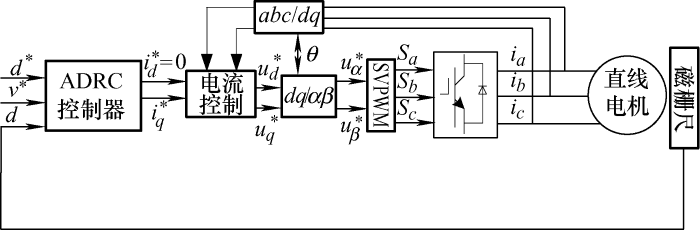
3.2 控制策略
图9
4 系统仿真
根据上述电机模型和控制策略,建立了基于Simulink的MTYLFSPM电机控制系统模型,并进行模拟电梯上下运行仿真分析,仿真结果如图10所示。
图10
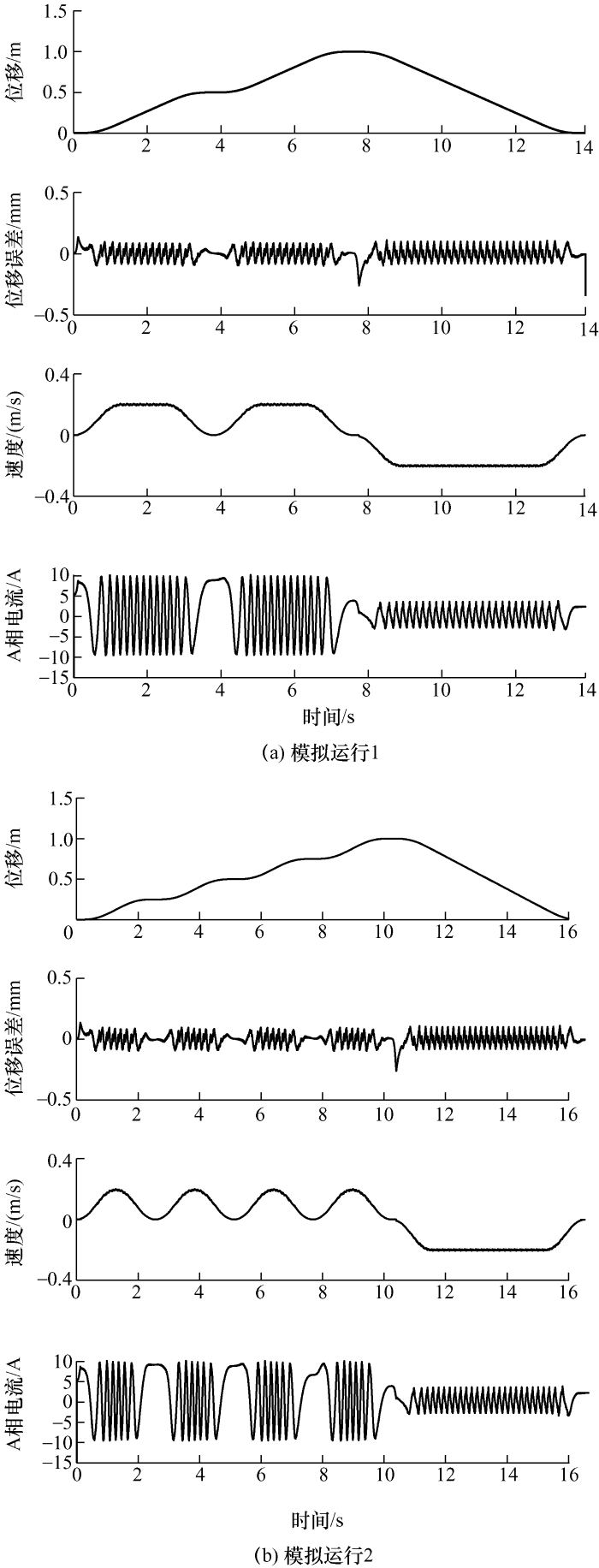
图10a是模拟电梯从一楼运行到二楼,再运行到三楼后直接下降到一楼的运行情况。每层楼高为0.5 m。在整个运行过程中,给定位移与实际位移的误差控制在0.3 mm以内,体现了ADRC技术的良好性能。从速度曲线可知,电梯运行中经历了加速、恒速和减速三个过程。电梯恒速运行时,速度为最大速度0.2 m/s。在电梯向下运行时,由于摩擦力较大且与电梯重力反向,直线电机所需出力比向上运行时明显减小,因此电流幅值比向上运行时显著降低。
图10b是模拟电梯从一楼运行到五楼,每个楼层都停靠,后直接下降到一楼的运行情况。每层楼高为0.12 m。在整个运行过程中,误差始终控制在0.3 mm以内。从速度曲线可知,电梯运行中只经历了加速和减速两个过程。电梯是加速运行到最大速度0.2 m/s后开始减速运行。这是由于电梯运行位移太短的缘故。
从上面的仿真结果可知,所建立的MTYLFSPM电机控制系统模型可以很好地模拟电梯运行 情况。
5 试验验证
为了验证上述理论分析和仿真结果的正确性,制造了1台τm/τs=6.5/6的MTYLFSPM电机,并搭建了基于dSPACE的控制系统平台,如图11所示。
图11
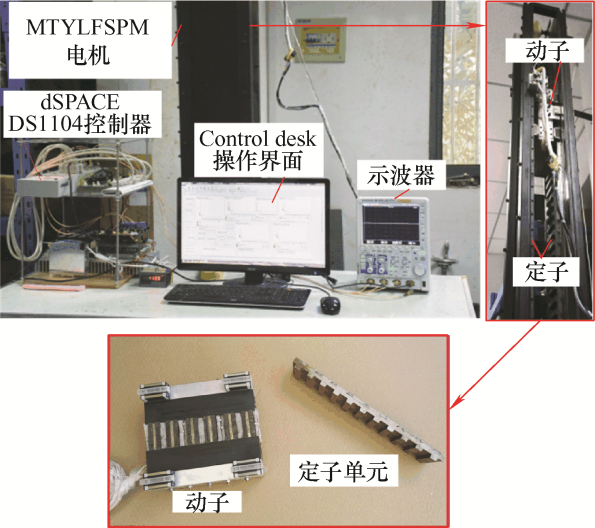
图12为样机的定位力的有限元仿真值和实测值。两者波形较为吻合,峰峰值达到100 N。为了比较,理想电机参数下的定位力仿真波形也在图中显示,其峰峰值为14 N。可见,样机加工误差明显增加了定位力。
图12
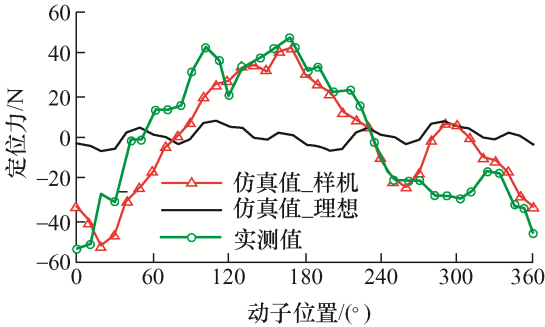
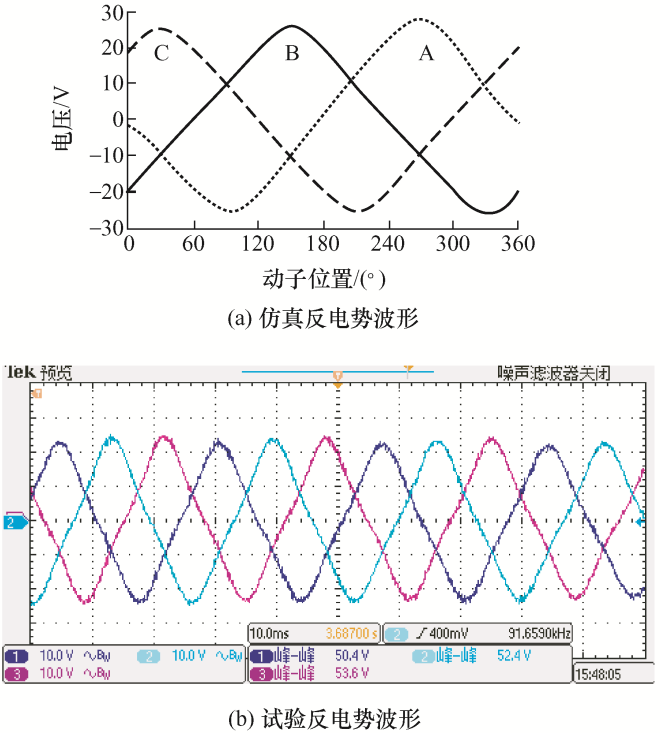
图13
与系统仿真对应的模拟电梯上下运行的试验波形如图14所示。模拟电梯从一楼运行到二楼,再运
图14
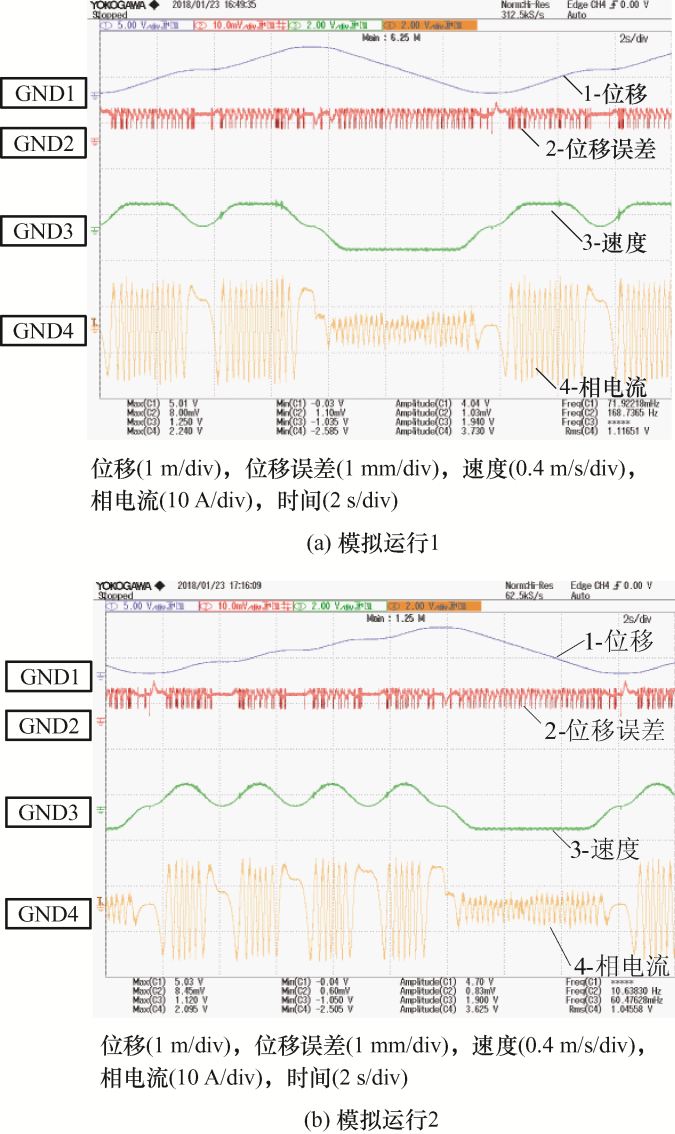
行到三楼后直接下降到一楼的运行情况,如图14a所示。从位移误差波形可知,在整个运行过程中,给定位移与实际位移的误差控制在0.5 mm以内,与仿真分析结果相近。以0.2 m/s恒速运行时,电流幅值约为10 A,与仿真结果相一致。但试验所得的电流幅值比仿真值波动更为明显,这是因为加工误差导致样机动子在不同位置处的定位力、摩擦力系数会有些许变化,而仿真模型中没能完全考虑这些变化。模拟电梯从一楼运行到五楼,每个楼层都停靠,后直接下降到一楼的运行情况如图14b所示。从电梯模拟运行波形中可知,位移误差一直保持在0.8 mm以内,略大于仿真结果。将仿真与试验结果进行比较可知,两者波形比较吻合,这也验证了所建电机模型和控制系统模型的准确性。
6 结论
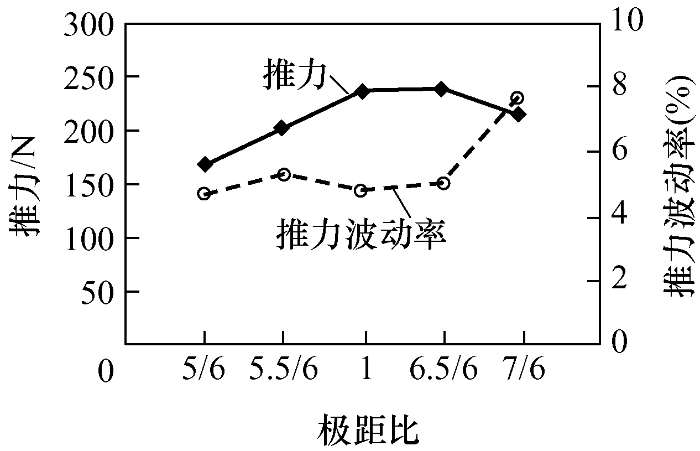
本文提出了一种针对无绳电梯应用场合的模块化细轭部磁通切换永磁直线电机。分析了极距比对电机推力和推力波动率的影响,确定极距比为6.5/6的电机性能最佳。针对该电机,建立考虑饱和、空间谐波的准确电机模型和系统仿真模型。模拟电梯上下运行的仿真分析验证了模型的准确性。基于试验样机和试验控制平台,完成了定位力、空载反电势、电梯模拟运行的试验研究。试验结果与仿真结果吻合较好,说明本文提出的电机及其控制系统为无绳电梯驱动提供了一种可行的解决方案。
参考文献
A study of linear PMSM driven ropeless elevators
[J].
Tall buildings and elevators:A review of recent technological advances
[J].
MULTI®-rope-less elevator demonstrator at test tower Rottweil
[J].DOI:10.17816/transsyst20184380-89 URL [本文引用: 2]
Linear motors for multi mobile systems
[C]//
Control of an elevator drive with a single-sided linear induction motor
[C]//
Vertical motion analysis of a linear induction motor elevator
[C]//
Study on the feasibility of application of linear induction motor for vertical movement
[J].DOI:10.1109/20.280911 URL [本文引用: 1]
Optimal structure design for minimizing detent force of PMLSM for a ropeless elevator
[J].
Quantitative comparison of novel dual-PM linear motors for ropeless elevator system
[J].
Propulsion and guidance simulation of a high-temperature superconducting bulk ropeless linear elevator
[J].
Performance analysis of an hts magnetic suspension and propulsion system with a double-sided HTS linear synchronous motor
[J].DOI:10.1109/TMAG.2011.2174046 URL [本文引用: 1]
Design,optimization,and prototyping of segmental-type linear switched-reluctance motor with a toroidally wound mover for vertical propulsion application
[J].
Ropeless elevator with linear switched reluctance motor drive actuation systems
[J].DOI:10.1109/TIE.2007.899875 URL [本文引用: 1]
Comparison of linear switched reluctance machines for vertical propulsion application:Analysis,design,and experimental correlation
[J].DOI:10.1109/TIA.2008.926294 URL [本文引用: 1]
定子永磁型无刷电机系统及其关键技术综述
[J].
DOI:10.13334/j.0258-8013.pcsee.2014.29.022
URL
[本文引用: 1]

定子永磁型无刷电机是一类永磁体和电枢绕组均位于定子的新型永磁无刷电机,可方便地对永磁体和电枢绕直接冷却以控制其温度,并易于通过“永磁+电励磁”实现对电机气隙磁场的直接控制,从而获得无刷电机的宽范围调速;凸极转子既无永磁体也无绕组,结构简单可靠,适合高速运行;该电机兼具功率密度高、效率高、容错性能好、控制灵活等特点。该文介绍了定子永磁型无刷电机的基本结构与工作原理,总结了它们的共性规律和个性差别,对其分析设计方法、控制策略等关键技术进行综述,讨论了多种磁通调节方案和容错控制策略,分析了该电机系统在电动汽车、飞轮储能、轨道交通等领域应用的可行性和潜力,最后对该电机系统的主要研究方向进行了展望。
Overview of stator permanent magnet brushless machine systems and their key technologies
[J].
五相容错式磁通切换永磁电机的气隙磁场调制运行机理分析
[J].
Operation principle analysis of air-gap magnetic field modulation in five-phase fault-tolerant flux switching permanent-magnet motor
[J].
基于电-热双向耦合的磁场调制型磁通切换电机设计与性能分析
[J].
Design and performance analysis of magnetic field modulated flux-switching permanent magnet machine based on electrical-thermal bi-directional coupling design method
[J].
磁路互补型模块化磁通切换永磁直线电机
[J].新型模块化初级永磁直线电机的永磁体和电枢绕组都置于初级短动子,而次级长定子结构简单,仅由导磁铁心组成,若应用在轨道交通等长定子等场合,可大大降低系统成本。在深入分析现有电机结构特点的基础上,提出一种基于磁通切换原理磁路互补的新结构。结构的互补性使每相绕组的反电势更正弦、电机总的定位力更小。介绍了模块化初级永磁直线电机的结构特点和运行原理,并基于有限元法,研究了其静态特性,具体包括对空载和单相绕组通电时的磁场及气隙磁通密度、绕组永磁磁链、空载反电动势、定位力、绕组电感以及静态推力等,并分析了永磁磁场和电枢磁场之间的相互耦合作用对电感特性的影响。理论分析和样机实验结果验证了设计方案的正确性和有效性。
Novel modularized flux switching permanent magnet linear machine with complementary magnetic circuits
[J].
次级无轭部双边磁通切换永磁直线电机及其控制
[J].
Double-sided linear flux-switching permanent magnet motor with yokeless secondary and control system
[J].
Optimization and comparison of novel e-core and c-core linear switched flux PM machines
[J].
DOI:10.1109/TMAG.2011.2125977
URL
[本文引用: 1]
Linear flat switched flux permanent magnet (SFPM) brushless machines have significant potential for many applications including transportation, automobile and aerospace. Novel E-core and C-core linear SFPM machines are proposed and optimized by individual parameter optimization, when the copper loss and volume is fixed, in this paper by finite element (FE) analysis. Then, the results of the individual parameter optimizations are examined by a global optimization with genetic algorithm. Furthermore, the magnet thickness of all the machines and the middle teeth of the E-core machines are analyzed individually. Finally, the electromagnetic performance of the novel machines are analyzed and compared with the conventional machine. It shows that both E-core and C-core machines require significantly smaller magnet volume since only about half the number of permanent magnets is required. Furthermore, the C-core machines have the largest back-EMF and force density due to the largest slot area, and the E-core machines are suitable for fault-tolerant operations while the 6/11 mover/stator pole E-core SFPM machine has the smallest cogging force.
电梯用初级永磁型直线电机及其控制系统研究
[D].
Research on linear primary permanent magnet motor and control system for elevator
[D].
A new method for multiple finite element models in cosimulation with electrical circuit using machine multiloop modeling scheme
[J].
DOI:10.1109/TIE.2014.2314053
URL
[本文引用: 2]
The circuit-field coupling techniques, which could take the nonlinearity, time and space harmonics, core losses, and mechanical movement into consideration, have been widely applied in modern power system simulation. However, existing coupling schemes can deal with only one finite-element (FE) model connected to the external circuit. A new coupling method in which the generic machine model is established by the multiloop method and the parameters are extracted from FE analysis in real time is proposed in this paper. The introduced method allows one more transient FE model; adding to the arbitrary schematic with robust and reliable simulation results. The comparisons from the simulation results of the proposed method with strong coupling cosimulation and experimental results have verified the effectiveness of the new method. Furthermore, experimental tests of a three-stage generator system are carried out to validate the results from the coupling simulation with the proposed method.
A high-fidelity and computationally efficient model for interior permanent-magnet machines considering the magnetic saturation,spatial harmonics,and iron loss effect
[J].DOI:10.1109/TIE.2014.2388200 URL [本文引用: 1]
Average torque separation in permanent magnet synchronous machines using frozen permeability
[J].
DOI:10.1109/TMAG.2012.2225068
URL
[本文引用: 1]
This paper investigates the average torque separation in permanent magnet (PM) synchronous machines. In order to accurately separate the PM and armature fields, and, hence, the torque components accounting for the magnetic saturation and crosscoupling, the frozen permeability (FP) method is often employed, while the torque can be calculated by different methods, such as Maxwell stress tensor and virtual work principle. Although these two methods result in identical torques in normal finite element (FE) analyses when appropriate FE meshes are used, the average torques calculated by these two methods are found to be different when the FP method is employed due to the influence of equivalent rotational magnetic saliency in the stator, which causes a part of PM torque being improperly attributed to the reluctance torque when Maxwell stress tensor method is employed. However, by using the virtual work principle, this is eliminated, and, hence, the average torque components can still be appropriately separated and analyzed.
From PID to active disturbance rejection control
[J].DOI:10.1109/TIE.2008.2011621 URL [本文引用: 1]
Force ripple and jerk minimisation in double sided linear switched reluctance motor used in elevator application
[J].DOI:10.1049/elp2.v10.6 URL [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}