

1 引言
新能源汽车采用电能作为主要能源,以电动机作为能量转换工具,电能在转化成机械能的过程中几乎没有其他物质排放,同时电动机驱动系统的噪声低、变速平滑,这些特点促进了新能源汽车应用和产业的快速发展[1]。燃料电池是一种通过催化剂促进燃料进行氧化还原反应,在正、负极形成电子移动的电池。其中氢燃料电池使用氢气作为燃料,利用电解水的逆反应产出电能,具有三个明显的优势:产物水对环境零污染,能量转换高效率,续航里程长,而且氢气燃料的来源非常丰富,是未来新能源汽车最具前景的动力能源。然而,氢燃料电池至今没有得到大规模应用,其根本原因是成本太高,目前氢燃料电池汽车的价格是燃油汽车和纯电动汽车的2~3倍。氢燃料电池汽车成本中2/3是燃料电池系统的花费:一方面,制氢、供氢、加氢系统的配套建设还不完善,规模化效益还未形成,用氢价格超过了燃油价格;另一方面,燃料电池汽车使用的关键零部件成本非常高,例如质子交换膜电池中含有贵重金属的催化剂铂、储氢罐需要采用耐压70 MPa的特殊材料,膜电极制造工艺精度达到0.01 mm,还需要给电池化学反应提供高温高压空气的高速空压机。
本文针对一款350 V、7.5 kW、60 000 r/min氢燃料电池空压机永磁同步电动机设计低成本控制器方案,首先介绍了高速电动机控制器方案的选型,然后对控制器的硬件和软件展开设计,最后进行样机试验。
2 高速永磁电动机控制器方案
2.1 高速空压机的电动机选型
空压机是燃料电池的重要组成部分。一方面,燃料电池需要在一定的温度和空气压力下才能最大效率地产生电能,而且电池反应堆中的质子交换膜要求工作在无油环境中。另一方面,燃料电池产生的五分之一电能用于空压机做功,空压机安装在电池反应堆的旁边,其体积越小越便于安装,同时要求空压机的噪声低、工作范围宽,动态响应快。空压机的种类主要有离心式、螺杆式、罗茨式、涡旋式等,其中离心式涡轮压缩机被视为燃料电池空压机的主流方向,离心式涡轮压缩机采用高速电动机直接驱动涡流,无增速齿轮和润滑油,体积小、结构紧凑,在功率密度、效率和噪声等方面具有最好的总体效果[7]。但是离心式空压机技术含量较高,涉及高速永磁电动机及控制器、空气悬浮轴承等技术。高速电动机主要有异步电动机、永磁电动机和开关磁阻电动机三种结构,其中高速永磁电动机具有效率高、功率密度高、调速性能好等优点,适合应用于高速离心式空压机。氢燃料电池离心式空压机用高速永磁电动机的技术参数如表1所示。
表1 高速永磁电动机的技术参数
| 项目 | 数值 | 项目 | 数值 |
|---|---|---|---|
| 额定电压/V | 350 | 极对数 | 1 |
| 额定功率/kW | 7.5 | 磁钢材料 | N42H |
| 额定转速/(r/min) | 60 000 | 护套材料 | 不锈钢 |
| 定子外径/mm | 90 | 转子外径/mm | 38 |
| 定子厚度/mm | 75 | 轴承 | 气浮轴承 |
| 定子槽数 | 24 | 冷却方式 | 定子水冷 |
(1) 定子。
由于高速电动机的电流和磁场变化频率非常高,会带来较高的绕组铜损和铁心涡流损耗,因此高速电动机的极对数都在二对以下,该高速电动机采用一对极。为了降低涡流损耗,定子产品采用0.2 mm厚度的无取向硅钢片(软磁合金、非晶态合金钢片的成本高、工艺技术要求高,不适合大批量应用);为了减少绕组铜损,定子绕组采用2股细导线并联绕制结构。
(2) 转子。
为了减少电动机的转动惯量,提高动态响应速度,高速电动机的转子一般为细长型,永磁体采用表面粘贴式结构。但是高速电动机的转子不能太长,因为在高速旋转时转子要承受很大的离心力而发生变形,严重时会出现扫膛,导致电动机损坏。因此为了保证转子具有足够的刚度和较高的临界转速,在设计时必须进行转子动力学模态分析和强度分析。同时在装配过程中要对转子进行动平衡校核,为了减少转子的不平衡量,转子必须采用对称结构,采用精密或超精密加工以保证转子同轴度,在装配过程中尽量减小误差。
(3) 护套。
表面粘贴式磁钢在转子高速旋转时受到很大的离心力,为了防止磁钢甩出,通常会在磁钢外面套上一个护套[8]。常用的转子护套材料有碳纤维、不锈钢和钛合金等。由于高速电动机的转子涡流损耗严重,护套还肩负着转子散热的任务。有学者提出采用磁钢分段、护套开槽的方法来减少转子涡流损耗,但这些方法对工艺要求极高,可能会破坏转子的平衡。综合考虑电动机的寿命、可靠性和性能指标,该高速电动机采用不锈钢护套。
(4) 轴承。
目前高速电动机使用的轴承可分为接触式轴承和非接触式轴承。接触式轴承主要有深沟球轴承和角接触球轴承,一般应用在小功率(2 kW以内)的高速电动机;非机械接触式轴承一般有气浮轴承和磁悬浮轴承。磁悬浮轴承控制技术复杂,需要使用额外的能源,因此该高速电动机采用气浮轴承。
(5) 散热。
相同功率下,高速电动机的损耗比低速电动机更加严重,主要热源包括定转子高频损耗和轴承摩擦发热;同时高速电动机的体积更小,散热面积小。高温会加速电动机的绝缘老化,影响磁钢的性能,严重时会退磁,因此高速电动机需要额外散热处理,同时通过优化设计尽可能降低转子发热。该高速电动机采用的散热措施是在电动机定子与壳体连接处设计循环冷却水套,如图1所示。而转子处于电动机内部,散热比较困难,转子热量主要通过气隙传递到定子,由定子水冷系统将热量排出,还有一部分热量由转轴两端散出。
图1

2.2 高速永磁电动机控制器方案
永磁电动机可以采用方波控制和正弦波控制,分别称为永磁无刷直流电动机和永磁同步电动机。采用方波控制控制算法实现简单,但存在换相转矩脉动,导致噪声大;采用正弦波控制运行平稳,噪声低,但控制算法较复杂。
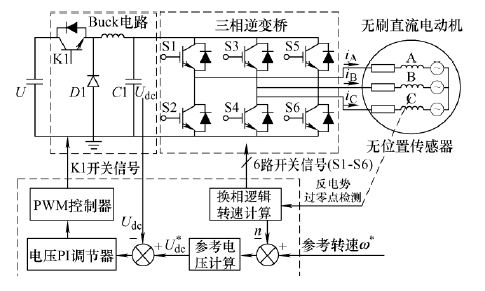
(1) 方波控制。
图2为高速永磁电动机方波控制结构图,主要由Buck变换电路、三相逆变电路、反电动势过零点检测电路、单片机电路以及电压/电流检测电路模块组成,通过检测反电动势过零点再延迟30°电角度进行换相。常规方波永磁电动机采用PWM调速,通过改变三相逆变电路功率管的占空比来改变定子绕组上的平均电压,从而实现永磁电动机的调压调速[9]。但高速永磁电动机的调速范围广,而高速永磁电动机的电感和电阻值很小,在低速(低占空比)时会出现电流断续,导致较大转矩脉动。为了降低PWM调制引起的电流脉动和由此产生的电动机损耗,高速永磁电动机采用前级Buck变换器进行调压调速、后级三相逆变电路只进行电流换相的结 构[10]。该方案可以降低三相逆变电路的开关频率降低损耗,同时消除PWM控制带来的高频谐波,抑制转矩脉动,但是需要增加前级Buck变换器,控制器体积增大,成本上升。
图2
(2) 正弦波控制。
图3
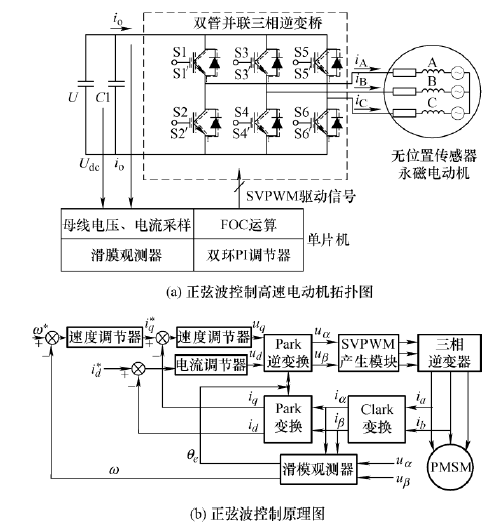
由于正弦波控制电动机运行更平稳,可以减少转矩波动对高速轴承的影响,提高整机系统的使用寿命。因此,氢燃料电池空压机电动机采用正弦波控制方式。
3 高速永磁电动机控制器设计
为了降低高速空压机的成本,该高速电动机控制器尽可能采用常规元器件;同时为了确保项目开发顺利进行,控制器硬件结构方案和软件算法尽量采用成熟技术,在此基础上进行改进。
3.1 功率器件及控制芯片选择
根据高速电动机参数350 V、7.5 kW、60 000 r/min,可以计算出电动机绕组额定电流在30 A以内,因此功率器件的选择规格如下:耐压600 V、电流50 A,留有一定裕量。高速电动机转子通常采用一对极结构,根据电动机转速公式(1)算出电流频率为1 kHz。
式中,$\omega $为电动机转速;P为转子极对数,$p=1$。
逆变器通过SVPWM模块驱动6个功率器件产生三相正弦波电压,为了提高输出电压波形的正弦度、减少谐波分量,应该尽量提高功率开关器件的开关频率,根据采样定理,为了实现准确的正弦波电流输出,采样频率要大于2倍测量信号频率,实际中采样频率为10~20倍测量信号频率。在芯片编程时PWM上溢/下上中断触发ADC采样,因此采样频率与开关频率相同,该高速电动机控制器的开关频率设定为25 kHz。MOSFET功率器件长时间稳定运行的开关频率可以达到几百kHz[11],但功率容量较小,耐压600 V时电流最大30 A,虽然可以通过多管并联的方式来降低导通电阻和增大电流容量,但是多管并联需要解决均流问题,可能导致逆变器效率和可靠性降低风险。为了降低控制器成本和提供可靠性,该高速电动机控制器选择Infineon公司IGBT功率模块DF80R07W1H5FP,最高开关频率为30 kHz。在采用IGBT的功率电子线路中,必须考虑功率器件的两大损耗:通态功耗和开关功耗。为了便于散热,IGBT等功率器件直接安装在散热器表面,结温升高后,元器件表面散出的大部分热量通过底座直接传导到散热器上,通过循环水冷管道将热量散发至周围环境的空气中。
由于电流采样频率与功率器件的开关频率相同,此时要求控制器每40 μs采样一轮电流值,在40 μs内控制芯片要完成三次坐标变换、电流PI调节、SVPWM扇区计算等工作,对控制芯片的主频要求较高。通常永磁同步电动机控制器采用高主频超的数字处理器,如TMSF283系列、STM332F4系列、英飞凌TriCore、瑞萨RH85系列等。这些芯片在永磁同步电动机控制方面技术成熟,但价格较高、并且芯片的很多功能都未使用。因此该高速电动机控制器采用峰岹科技公司的专用电动机控制芯片FU6861。FU6861是一款集成高速8051内核和 电动机控制处理器的(双核)专用芯片,主频24 MHz,该芯片在内部集成功率器件驱动器predriver、电源变换器LDO、内置电压参考VREF和4路模拟比较器、8通道12 bit高速模数转换器ADC,单周期16×16位乘法器、32/32位除法器(16个时钟周期),及永磁同步电动机磁场定向控制器FOC硬件运算器,同时内置SPI、I2C、UART等多种通信功能,适用于永磁电动机的方波或正弦波驱动控制。该高速电动机控制器利用FU6861的8051内核完成滑模观测器计算和速度PI调节器计算、电动机控制内核完成坐标变换和SVPWM信号计算。
3.2 位置和转速滑模观测
高速永磁同步电动机一般不安装转子位置传感器,电动机的位置和转速可根据测量电动机的电流和电压估算出来,滑模观测器(Sliding mode observer,SMO)是一种简单且性能较好的算法。永磁同步电动机的电压平衡方程由空间电压矢量、电阻、电感、电流和反动势组成[8],如式(2)所示
式中,${{I}_{x}}$为绕组相电流矢量;${{e}_{x}}$为反电势矢量;${{V}_{x}}$为输入电压矢量;L为绕组电感;R为绕组电阻。
在数字域中,式(2)可表示为
该公式是永磁同步电动机的离散化数字模型,也称为电流观测器。如图4所示,灰色方框代表实际的永磁同步电动机,下面方框代表离散化数字电动机模型,两个模型使用的输入电压${{V}_{s}}$相同,通常永磁同步电动机的反电势正弦度较高,可认为数字模型中的反电动势$e_{s}^{*}$与电动机实际的反电动势${{e}_{s}}$相同,因此可以通过数字模型中的估算电流$i_{s}^{*}$来匹配电动机实测相电流${{i}_{s}}$。电动机的位置角度和速度估算是基于电流观测器而实现的。为了使绕组估算电流和实测电流相匹配,电动机数字模型需要通过闭环控制来进行校正,其中Z为饱和函数,K为滑模系数。
图4
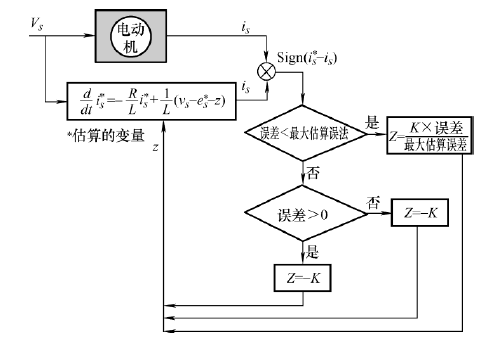
对电动机数字模型进行补偿,使电动机的实际电压、电流与电动机数字模型达到一致,然后对校正因子Z进行滤波,估算出反电动势$e_{s}^{*}$。每个控制周期对反电动势的估算值$e_{s}^{*}$进行更新,反馈给电动机的数字模型[9],直到两个模型的反电动势误差达到一定范围内。${{e}_{\alpha }}$和${{e}_{\beta }}$值是${{e}_{s}}$的两个矢量分量,可用${{e}_{\alpha }}$和${{e}_{\beta }}$的反余切计算出位置角度${{\theta }^{*}}$,如式(4)所示
上述计算位置角度${{\theta }^{*}}$时使用了滤波函数,在使用${{\theta }^{*}}$进行坐标变换前需要对相位进行补偿,补偿大小取决即电动机的速度,${{\theta }^{*}}$补偿量计算如图5所示。
图5
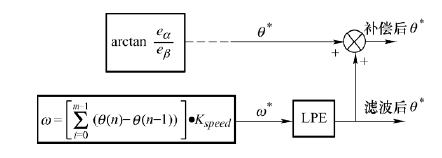
(1) 由未补偿的${{\theta }^{*}}$计算得到电动机的速度$\omega $。
(2) 对速度$\omega $进行滤波处理,得到${{\omega }^{*}}$,再计算${{\theta }^{*}}$的补偿量[10]。
3.3 单电流传感器采样
电流采样通常有两种方法:一种是检测精密电阻上的电压,再根据欧姆定理计算出电流,该方法成本低,但电流流过精密电阻会产生一定损耗,温度较高时存在温飘,适合电流较小的应用场合;另一种是直接通过霍尔电流传感器获得一个电压信号,该方法能测量大电流且功耗小,电流传感器与绕组之间相互隔离,但成本高、体积大。该高速电动机控制功率较大,所以选择电流传感器检测电流。
表2 母线电流传感器实测相电流表
| 矢量状态 | S2 | S4 | S6 | 实测电流 |
|---|---|---|---|---|
| V0 | 0 | 0 | 0 | 0 |
| V1 | 0 | 0 | 1 | -iC |
| V2 | 0 | 1 | 0 | -iB |
| V3 | 0 | 1 | 1 | iA |
| V4 | 1 | 0 | 0 | -iA |
| V5 | 1 | 0 | 1 | iB |
| V6 | 1 | 1 | 0 | iC |
| V7 | 1 | 1 | 1 | 0 |
3.4 三段式起动
无位置传感器永磁电动机控制器采用间接检测法得到转子的位置信息,通过检测电动机的绕组电流或电压/反电势信号,经过滑膜观测器算法得到转子位置信号。但是高速永磁电动机的反电动势系数小、电阻与电感小,在起动时刻电流和电压为零,难以计算出转子位置信息,需要其他方法来起动,如三段式起动法、高频注入法、升压升频法等[6]。其中升压升频法主要应用在异步电动机无位置传感器控制器中,高频注入法主要应用在起动时电动机不能反转的场景中,算法实现难度较大;三段式起动方法最为成熟,三个阶段分别是转子预定位、加速运行和切换,算法实现比较简单。对于空压机应用,其负载特性是转矩与转速平方成正比、起动时对电动机定位转向没有转向要求、起动阶段负载转矩低,因此三段式起动方法非常适合,具体实施如下。
预定位:将d轴电流给定为0,设置一定的q轴电流,使电动机铁心处产生磁通量,将转子的位置固定在初始角度位置。
加速运行有三种模式:爬坡起动、采用位置估算的Omega起动、先爬坡再用Omega起动。爬坡起动的原理是首先给定起动电流Iq和强制角度以配合坐标变换进行SVPWM运算,拖动电动机开环运行,当电动机转速增加到预定转速时,参考电流Iq和角度信号切换到无位置传感器闭环控制算法。Omega起动的原理是,给定起动电流Iq,位置估算算法估算当前速度,当速度低于起动限制转速时,估算器输出强制角度,将电动机拖动。当电动机速度大于起动的最小切换转速,起动结束,角度信息由估算算法计算得出。第三种方法,先爬坡起动后用Omega起动的方式是结合前两种方法的优点,先将电动机拖动,电动机有了一定转速后,再用Omega起动,可靠性大幅提高。该高速电动机控制器采用先爬坡后用Omega起动的方式。
切换:当电动机速度大于设定的最小切换转速,加速阶段结束,转子位置信息切入到由SMO算法提供。
3.5 双闭环控制和程序设计
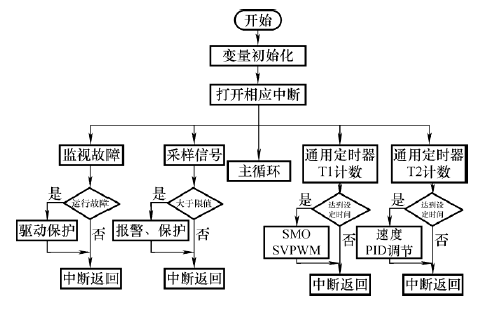
高速永磁电动机的控制程序如图6所示,主要由主程序、保护中断程序和定时器中断程序等组成。主程序包括初始化设计和主循环功能,初始化内容包括系统时钟、IO口功能定义、中断向量表和中断使能、存储器、AD单元、PWM模块、控制参数初始化、通信数据定义等。保护中断程序通过实时监测相电流和母线电压,根据电动机的运行状态不同设置为限电流保护、限电压保护和限功率保护。定时器中断程序根据任务的时效性不同设置不同的定时器周期,时效性最高的任务设置定时器周期最短,任务时效性从高到低排列如下:AD采样中断、滑模观测器计算中断、速度PID计算中断。
图6
4 样机试验
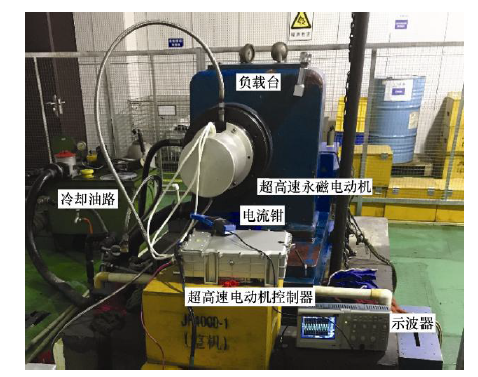
4.1 试验平台
图7
4.2 高速电动机的空载起动测试和额定负载测试
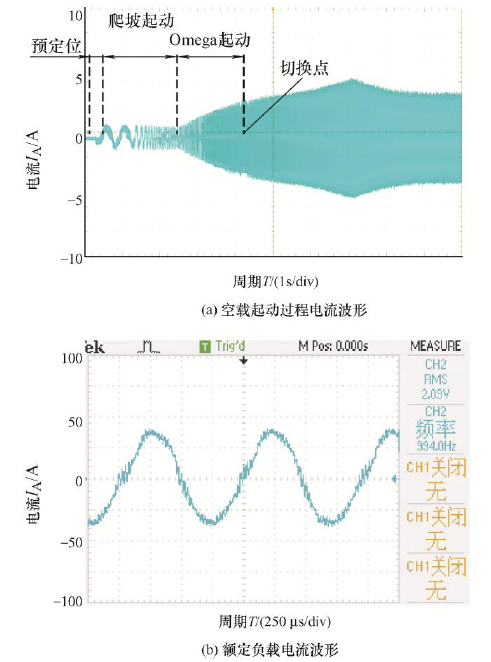
由于氢燃料电池空压机属于风机类负载,起动阶段转速很小,负载功率几乎为零,随着转速增加负载功率快速上升。因此在测试高速电动机起动性能时,负载台不给电动机加载,高速电动机空载起动。图8a显示了无位置传感器高速电动机起动时的电流波形,从图中可以看出起动过程分为三个阶段:预定位、加速起动(包括爬坡起动和Omega起动)、切换。控制器采用速度闭环控制,电流由于电动机惯性出现超调,逐渐趋向稳定,空载时电流3.2 A。待电动机运行稳定后,负载台给电动机施加负载转矩1.2 N·m,图8b显示了高速电动机在额定负载时的电流波形,正弦度非常高,电流有效值为23 A,频率994 Hz,转速59 640 r/min,速度波动在0.5%以内。
图8
4.3 高速电动机控制器的效率特性
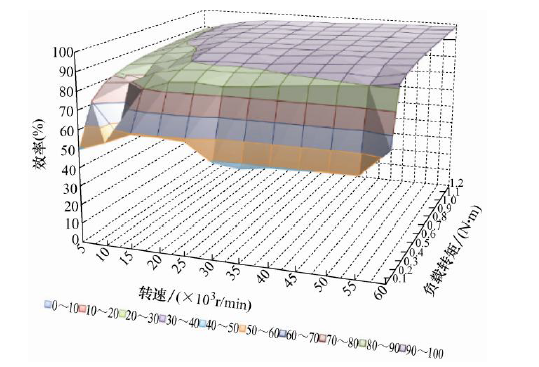
通常认为电动机的三相绕组完全对称,其三相线电压和相电流也完全对称。可以通过检测母线电压和电流计算出控制器输入功率;根据检测绕组线电压和相电流,再经过傅里叶分解计算出电压和电流的相角,r线电压、相电流和相角余弦乘积的$\sqrt{3}$倍即控制器的输出功率。输出功率与输入功率之比得到控制器的效率。控制器设定转速5 000~60 000 r/min,每次增加5 000 r/min,测试台调节负载转矩0~1.2 N·m,测试控制器的效率值,图9显示了控制器在不同负载下效率分布图,效率大于90%的占了整个调速区域的三分之二以上。
图9
5 结论
氢燃料电池汽车是目前新能源汽车的研究热点,目前尚未得到大面积推广的原因是成本太高,相关配套产业链还不够成熟。设计了一款氢燃料电池高速空压机控制器,样机试验得出以下结论。
(1) 无位置传感器控制器通过检测母线电流重构三相绕组电流,利用滑模观测器估算转子位置和速度,采用三段式起动方法。起动和运行过程平稳,在整个调速范围效率较高。
(2) 控制器选用常规材料的元器件,结构简单、成本较低。
参考文献
质子交换膜燃料电池低温启动水热管理特性及优化
[J].
Optimization of water and thermal management in proton exchange membrane fuel cell during low temperature startup
[J].
车载燃料电池用空气压缩机工作性能研究及能效分析
[D].
Performance research and power analysis of air compressor in fuel cell vehicle
[D].
燃料电池车用空气压缩机发展现状及趋势
[J].
Development status and trend of air compressor in fuel cells vehicle
[J].
氢燃料电池车用高速离心式压缩机的设计及研究
[D].
Design and research of high speed centrifugal compressor for hydrogen fuel cell vehicle
[D].
高速永磁无刷电动机电磁损耗的研究概况
[J].
Study on electromagnetic losses in high-speed permanent magnet brushless machines-the state of the art
[J].
开式绕组无刷电动机换相转矩脉动抑制研究
[J].
Research on commutation torque ripple suppression of open winding brushless DC motor
[J].
Sensorless drive of high-speed BLDC motors based on virtual third-harmonic back EMF and high-precision compensation
[J].DOI:10.1109/TPEL.63 URL [本文引用: 1]
散热风机无位置传感器控制器设计
[J].
Design of position sensorless controller for BLDC cooling fan
[J].
电动汽车用永磁同步电动机控制器设计
[J].
Design of permanent magnet synchronous motor controller for electric vehicle
[J].
Investigation of losses for a concentrated winding high-speed permanent magnet-assisted synchronous reluctance motor for washing machine application
[J].DOI:10.1109/TMAG.2018.2889566 URL [本文引用: 2]
车载超高速永磁无刷电动机驱动器
[J].
A vehicle mounted super high speed permanent magnet brushless motor drive
[J].
高速电主轴驱动控制技术研究综述
[J].
高速电主轴是高速数控机床核心功能部件,主轴单元融合了高速电机、精密轴承、驱动控制等关键技术。高速主轴电机的驱动控制技术是决定主轴动静态性能的关键因素之一。因此,有必要对现有的主轴电机驱动控制技术进行系统分析和深入总结。根据主轴电机驱动控制技术的发展历史:从V/f控制、矢量变频控制、直接转矩控制到混合驱动控制以及智能控制等关键控制技术进行逐一分析和评述。在此基础上总结各控制技术客观存在的问题并进行对比分析,最后对高速电主轴驱动控制技术的发展趋势进行了预测和展望。]]>
Review on the drive and control technology of high-speed motorized spindle system
[J].
Investigations on high reliability permanent magnet motor controller for electric vehicle
[C]//
基于Buck变换器的无刷直流电动机无位置传感器控制
[J].
Sensorless control of brushless DC motor based on Buck converter
[J].
单电阻采样的永磁同步电动机相电流重构策略
[J].
Phase current reconstruction strategy for PMSM using one-shunt current sampling
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}