


1 引言
基于PWM整流器离散模型,本文得出一种直接电流控制(Direct Current Control,DCC)方法。该方法在一次预测计算后可以得到当前时刻最优的非零矢量,与零矢量作用效果进行比较后得到最优作用矢量。该方法仅包括一次预测和比较环节,与传统的预测电流控制对比而言,计算量降低,却仍然具有出色的控制性能。
直接电流控制的基础是PWM整流器的离散数学模型,所以预测过程中需要准确的参数。当电感参数发生变化时,控制效果会受到很大影响。为了增强这种直接电流控制算法的鲁棒性,文献[10]基于永磁同步电机提出一种无模型预测电流控制,该方法采用上一时刻的电流差分和当前时刻的采样电流来预测下一时刻电流,无需任何系统参数,具有很强的鲁棒性,通过在永磁电机上进行实验验证了其有效性。该方法主要缺陷在于每个周期内都要对电流二次采样,控制周期初始时刻采样一次,延时一段时间后再采样一次。这种采样方式增加了硬件采样次数和软件实现的难度。当控制周期大小改变或者程序执行时间变化时,电流采样时刻也需要相应地做出调整,从而使得这种控制算法应用不方便。另外,该方法的缺陷还表现在控制算法只在三相静止坐标系下实现,电流差分数据会占用较大存储空间。针对PWM整流器,本文在文献[10]的基础上提出了一种改进的无模型预测电流控制(Model-Free Predictive Current Control,MFPCC),该方法只需在每个控制周期对电流采样一次,降低了计算量。事实上,由于采样频率高,单次电流采样即可实现电流差分的计算,从而简化了算法。不同于文献[10],本文提出的MFPCC是基于两相静止坐标系,只需较小的数组来存储电流差分值,从而减小计算量,方便数字实现。利用搭建的基于TMS320F28335 DSP的两电平PWM整流器实验平台进行了相关实验,对比了DCC和MFPCC两种方法的动态、稳态性能和参数鲁棒性,结果表明以上方法原理正确,具有较好的控制性能。
2 直接电流控制
2.1 预测电流计算
三相电压型PWM整流器电路如图1所示,电网侧的各相交流电压分别为ea、eb和ec;L和R表示交流侧电抗器的等效电感和电阻。
图1
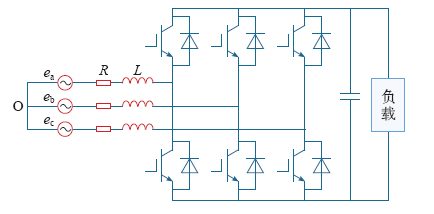
图1
三相电压型PWM整流器电路
Fig.1
Main circuit of three-phase voltage sourcePWM rectifier
利用式(1)将三相静止坐标系变换至两相静止坐标系,即

其中,x为两相坐标系下的复矢量。
将整流器模型中的各个电量按式(1)变换到两相坐标系下,则三相PWM整流器模型可以表示为
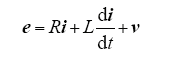
式中,e为网侧电压复矢量;i为网测电流复矢量;v为整流器交流侧输出电压复矢量。
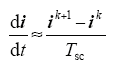
式(2)中包含的di/dt可以采用一阶欧拉离散法进行离散化,得
将式(3)代入式(2)进行离散化,得
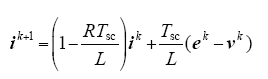
根据式(4),利用k时刻采样得到的网侧电压ek、网测电流ik和整流器交流侧电压vk可以计算出k + 1时刻的电网电流预测值ik+1。
利用采样得到的电网电压e和网测电流i可以计算出网侧复功率S[11],即
其中,“*”表示共轭。
根据式(5)得电流参考值iref为
2.2 选取最优作用矢量
两电平电压型PWM整流器可以输出8种电压空间矢量,对应表示8种开关状态。其中有6种非零作用矢量(u1,u2,…,u6)和两种零矢量(u0,u7)。传统的模型预测电流方法需要枚举8次,计算量大,本文提出一种快速的矢量选择方法。
由式(4)电网电流预测可改写为
其中

式中,i0k+1为零矢量作用时的预测电流。
式(7)表明预测电流ik+1可以用i0k+1和vk表示。
参考电流与预测电流之间的误差矢量可以表示为
其中,由零矢量产生的误差矢量为
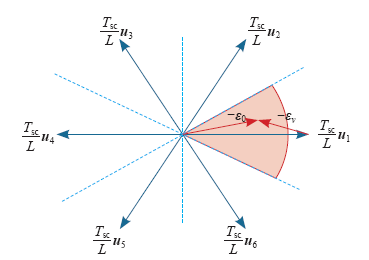
如图2所示,若误差矢量-ε0k+1在图中的阴影区域中,则矢量u1导致的误差矢量的幅值最小,可以判定u1为当前时刻可以选出的最优非零矢量;将该矢量代入式(7)中可得u1作用下的电流误差矢量ε1k+1;分别得到|ε0k+1|和|ε1k+1|的大小后,如果|ε0k+1|>|ε1k+1|,那么最优电压矢量是非零矢量u1,如果|ε0k+1|<|ε1k+1|,那么最优电压矢量为零矢量,如果最终得到的最优矢量是零矢量,那么需要遵循当前时刻开关动作次数最小的原则,考虑上一时刻作用的矢量,选取使得作用后开关次数较少的那个零矢量作为要发出的矢量。
图2
2.3 一拍延时补偿
k时刻采样获得的电流ik后,数字信号处理会进行一段时间,选出的电压矢量uk只能作用于k + 1时刻。这将导致额外的功率脉动,为实现对电流的精确控制,需要采用提前预测一步的方法解决控制延时问题。具体过程为k时刻预测k + 1时刻的网测电流ik+1,利用预测得到的电流值结合快速矢量选择选出k + 1时刻需要发出的最优电压矢量。加入一拍延时补偿后,式(10)改写为
其中
3 无模型预测电流控制
因为每个控制周期只选出一个要作用的电压矢量,所以无模型预测电流控制在理论上可以实现,并且根据当前采样的电流和电流差分来预测下一时刻的电流。因为系统控制周期较短,在每个控制周期中,考虑网测电流仅存在线性变化。基于这种考虑,每个周期的电流差分可以精确计算。在实际系统中,电压跳变和死区对采样精度有影响,为了得到更准确的电流差分,文献[10]中提出的无模型预测电流控制中,一个控制周期内对电流进行两次采样,之后预测电流差分值,这种方法增加了硬件采样次数和软件实现的难度,同时增加了计算负担,而且有可能导致检测到电流尖峰。为了避免出现这种情况,通常的做法是电压矢量作用后延迟一段时间进行第二次电流采样。然而延时时间需要靠经验来调试,不利于此方法的推广。
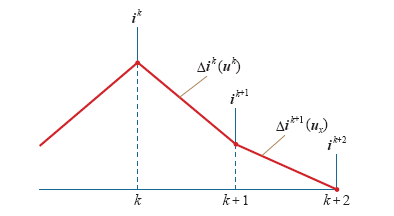
本文采用单次电流采样方法,即在每个控制周期内仅采样一次电流。由于每个控制周期开始时刻的采样值也是上个周期结束时刻的采样值,完全可以实现相同的效果。因为需要考虑一拍延时造成的影响,当前k时刻应该对k + 2时刻的网测电流进行预测,如图3所示,可以得到k + 2时刻的电流为

其中
式中,Δik(uk)为k~k + 1时刻之间uk作用下的电流差分矢量;Δik+1(ux)为k + 1~k + 2时刻之间ux作用下的电流差分矢量。可以看到,k + 2时刻的预测电流无需任何整流器参数。
图3
由式(13)可知,在k时刻无法计算得到Δik和Δik+1值,因为它们分别是在k + 1和k + 2时刻进行计算的。预测控制的基本思想是根据系统现在和过去的信息来预测未来的信息。如果采样间隔足够短,现在和过去的电流差分可以直接用来预测下一时刻的电流,换句话说,Δik和Δik+1可以用之前存储的电流差分矢量来近似,则Δik和Δik+1可表示为

式中,Δiiold|Si=Sk、Δijold|Sj=Sk+1为过去时刻电压矢量Si和Sj作用下的电流差分。将式(16)、式(17)代入式(13),得到k + 2时刻的电流为
由式(18)可知,k + 2时刻的预测电流只取决于当前时刻的电流和电流差分。为了更准确地近似Δik和Δik+1,在每个采样周期内,以前存储的电流差分应该被新的计算值更新。不同电压矢量电流差分的更新频率不一样,这可能会导致在某些电压矢量作用下的电流预测不精确,但是由于采样频率比较高,不同更新频率所带来的影响并不大。
定义目标函数
将7个电压矢量代入式(18)、式(19)中,由式(19)中目标函数计算得到的值最小对应的电压矢量作为最终选出的矢量。
4 实验结果
4.1 稳态性能
实际搭建了两电平PWM整流器样机对DCC和MFPCC控制策略进行实验验证。实验平台的实际架构如图4所示,控制板选用DSP TMS320F28335型控制器,为了方便观测内部变量,在控制板上增加了4通道DA。实验过程中,使用电流探头直接测出电流,剩余电量通过12位DA输出。整个系统包含的参数有:交流侧线电压有效值150V,频率50Hz,交流侧电感10mH,直流母线电容840μF,采样频率30kHz。
图4
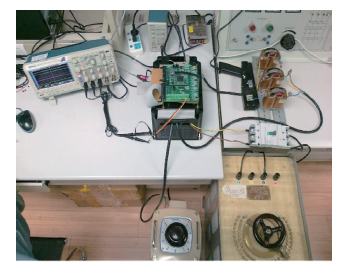
图5
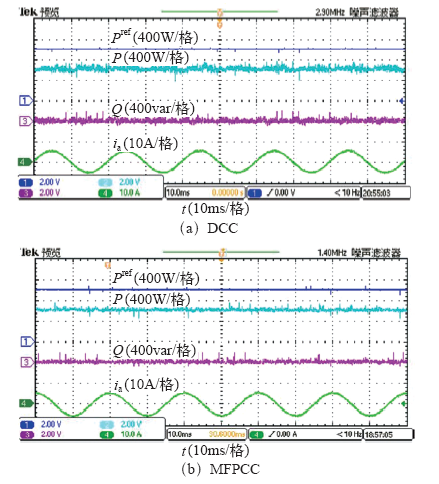
图5
DCC和MFPCC的稳态响应
(P = 1 000W,Q = 0var)
Fig.5
Steady state response for DCC and MFPCC
(P = 1 000W,Q = 0var)
图5表明,DCC的稳态性能比MFPCC的差,有功脉动和无功脉动较大。进一步量化分析,通过计算0.1s内有功功率和无功功率的均方差得到DCC的有功脉动为33.498 5W,无功脉动为31.683 6var,其A相电流THD为2.200 8%;MFPCC方法中有功脉动为20.963 2W,无功脉动为22.026 6var,其A相电流THD为1.933 4 %,这表明MFPCC稳态性能优于DCC。
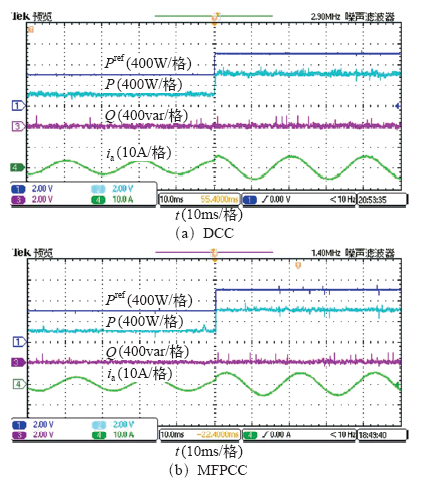
4.2 动态性能
图6
4.3 鲁棒性
图7
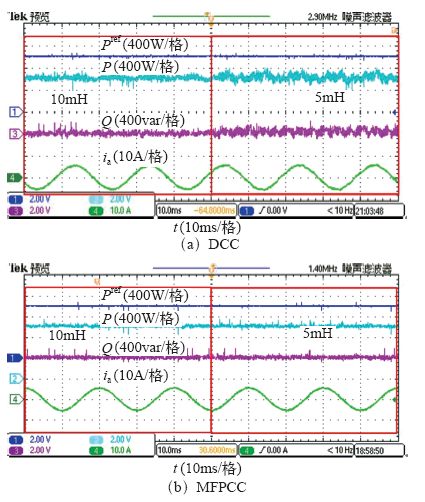
图7
电感变化时DCC和MFPCC的稳态响应
Fig.7
Steady state response for DCC and MFPCC when the inductance varies
图8为在模型电感分别等于10mH和5mH时DCC和MFPCC的有功脉动、无功脉动和THD对比。
图8
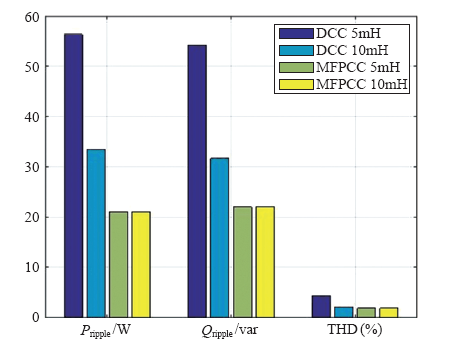
图8
DCC和MFPCC的有功脉动、无功脉动和THD对比图
Fig.8
Comparisons of active power ripple,reactive power ripple and current THD for DCC and MFPCC
5 结论
本文首先提出了一种直接电流控制方法,利用预测计算得到的电流矢量及其矢量误差比较获得最终要选取的矢量,因为整个过程仅需要一次预测和一次比较,与传统直接电流控制相比,计算量和复杂程度都得到了减小。然后提出一种无模型预测电流控制方法,这种方法在一个周期中采样一次网测电流,无需整流器参数即可获得最终要选取的最优电压矢量,鲁棒性强,相较于所提出的直接电流控制方法更容易实现。两电平PWM整流器样机的实验结果表明,在理想参数情况下,DCC稳态时的有功脉动、无功脉动和电流THD均大于MFPCC,说明MFPCC 稳态性能优于DCC,动态时二者的性能十分相似。考虑到MFPCC有较强的参数鲁棒性,因此在实际系统中MFPCC有较大的实用价值。
参考文献
PWM regenerative rectifiers: state of the art
[J].DOI:10.1109/TIE.2004.841149 URL [本文引用: 1]
A new mathematical model and control of a three-phase AC-DC voltage source converter
[J].DOI:10.1109/TPEL.63 URL [本文引用: 1]
Direct power control of an AFE using predictive control
[J].DOI:10.1109/TPEL.2008.2002065 URL [本文引用: 1]
Direct power control of PWM converter without power-source voltage sensors
[J].DOI:10.1109/28.673716 URL [本文引用: 1]
Low complexity model predictive control-single vector-based approach
[J].
DOI:10.1109/TPEL.2013.2291005
URL
[本文引用: 1]

Finite control set model predictive control (FCS-MPC) is emerging as a powerful control scheme in the control of power converters, because it takes the discrete nature of power converters into account and offers a flexible way to consider various constraints. However, conventional FCS-MPC requires to evaluate a cost function for each discrete switching states, which poses high computational burden. This paper proposes a low-complexity MPC (LC-MPC), which only requires one prediction to find the best voltage vector. The principle of LC-MPC is inherited from prior direct current control (DCC), but has been generalized by identifying its advantages, limitations, and potential application areas. Furthermore, the relationship between LC-MPC and FCS-MPC is studied and it is found that in some cases, the LC-MPC is completely equivalent to FCS-MPC. This paper presents the application example of LC-MPC in power control of three-phase ac/dc converter. To make it a success, the negative conjugate of complex power in synchronous frame is selected as the control variable. Detailed principle of vector selection is introduced and the reason for requiring only one prediction in the proposed LC-MPC is strictly proven using mathematical tools. The proposed LC-MPC is compared with conventional FCS-MPC and its effectiveness is verified by both simulation and experimental results from a two-level ac/dc converter.
Model predictive direct power control of a PWM rectifier with duty cycle optimization
[J].
DSP-based active power filter with predictive current control
[J].DOI:10.1109/41.585830 URL [本文引用: 1]
A comparative study of predictive current control schemes for a permanent magnet synchronous machine drive
[J].DOI:10.1109/TIE.2009.2018429 URL [本文引用: 1]
Delay compensation in model predictive current control of a three-phase inverter
[J].
DOI:10.1109/TIE.2011.2157284
URL
[本文引用: 1]
When control schemes based on finite control set model predictive control are experimentally implemented, a large amount of calculations is required, introducing a considerable time delay in the actuation. This delay can deteriorate the performance of the system if not considered in the design of the controller. In this paper, the problem is described, and the solution to this issue is clearly explained using a three-phase inverter as an example. Experimental results to validate this solution are shown.
Model- free predictive current control for interior permanent magnet synchronous motor drives based on current difference detection technique
[J].
DOI:10.1109/TIE.2013.2253065
URL
[本文引用: 4]
A model-free predictive current control (PCC) of interior permanent-magnet synchronous motor (IPMSM) drive systems based on a current difference detection technique is proposed. The model-based PCC (MBPCC) of IPMSM requires knowledge of parameters such as resistance, q-axis inductance, and extended back EMF. This paper develops a new model-free approach that alleviates the need for excessive prior knowledge about the system and only utilizes the stator currents as well as the current differences corresponding to different switching states of the inverter. Despite the salient difference of the proposed approach, it adopts a measure similar to that in the MBPCC approach to obtain the next switching state of the inverter by minimizing a cost function. It is noteworthy that the proposed method is easy to implement due to its simplicity and free of any multiplication operation. For comparison purposes, a digital signal processor, TMS320LF2407, is used to execute the two aforementioned current control techniques. Several experimental results show that the proposed method can significantly improve the current-tracking performance.
Instantaneous reactive power compensators comprising switching devices without energy storage components
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}