


1 引言
直接转矩控制(Direct Torque Control,DTC)与多电平逆变器、无速度传感器技术相结合,实现高电压、大功率交流调速,是交流调速的发展趋势[1]。
本文针对直接转矩控制策略的特点,直接利用基于定子磁链的模型参考自适应算法进行无速度传感器速度辨识,无需再计算转子磁链,使速度辨识算法得到大幅简化;同时对模型中的磁链观测环节进行改进,使用低通滤波器代替纯积分环节,避免了因为积分饱和导致的磁链畸变,提高了定子磁链的观测精度。
实验环节将改进拓扑结构的三电平逆变器与改进的无速度传感器算法相结合,并与传统三电平供电的无速度传感器系统进行比较。仿真实验表明,系统整体控制算法更简单,控制器结构得到简化,可有效抑制磁链和转矩的脉动,适用于高压大功率环境,在工程上更易实现。
2 简化的三电平逆变器拓扑结构
2.1 简化后的拓扑结构分析
图1
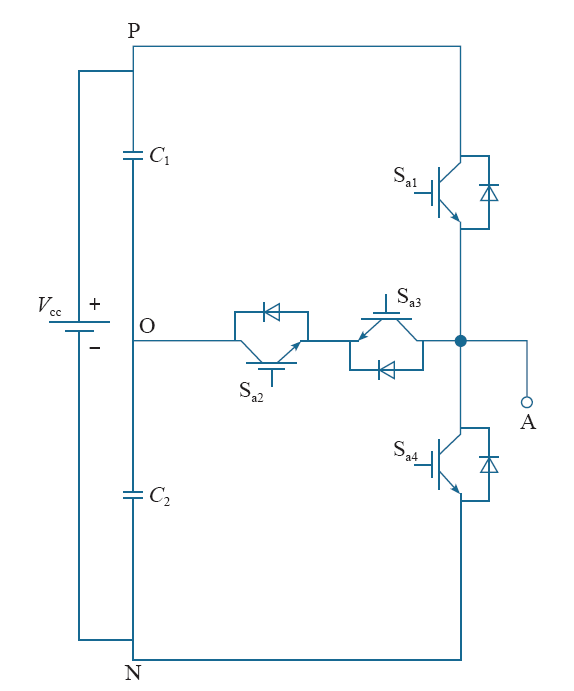
图1
简化拓扑结构的单相三电平逆变器
Fig.1
Single phase three-level inverter with simplified topology
2.2 改进三电平逆变器控制方法选择
表1 各种因素的优先级别
Tab.1
| 影响因素 | 潜在危害 | 优先级 |
|---|---|---|
| 高电压跳变 | 对逆变器或负载冲击大,损害绝缘 | 1 |
| 中性点电位偏移 | 电压偏移可能超过IGBT或电容的耐压 | 2 |
| 开关频率 | 开关损耗 | 3 |
表2 固定合成矢量法的合成矢量
Tab.2
| 合成电压矢量 | 固定合成矢量序列 | |||||
|---|---|---|---|---|---|---|
| V1 | 000 | 100 | 1-1-1 | 0-1-1 | -1-1-1 | 100 |
| V2 | 000 | 110 | 10-1 | 0-1-1 | 10-1 | 110 |
| V3 | 000 | 00-1 | 11-1 | 110 | 11-1 | 00-1 |
| V4 | 000 | -10-1 | 01-1 | 110 | 01-1 | -10-1 |
| V5 | 000 | 010 | -11-1 | -10-1 | -11-1 | 010 |
| V6 | 000 | 011 | -110 | -10-1 | -110 | 011 |
| V7 | 000 | -100 | -111 | 011 | -111 | -100 |
| V8 | 000 | -1-10 | -101 | 011 | -101 | -1-10 |
| V9 | 000 | 001 | -1-11 | -1-10 | -1-11 | 001 |
| V10 | 000 | 101 | 0-11 | -1-10 | 0-11 | 101 |
| V11 | 000 | 0-10 | 1-11 | 101 | 1-11 | 0-10 |
| V12 | 000 | 0-1-1 | 1-11 | 101 | 1-11 | 0-1-1 |
改进拓扑结构的逆变器与传统的二极管钳位式三电平逆变器相比,开关通断组合是相同的,在控制策略上并未增加复杂性。
3 基于定子磁链的模型参考自适应无速度传感器系统
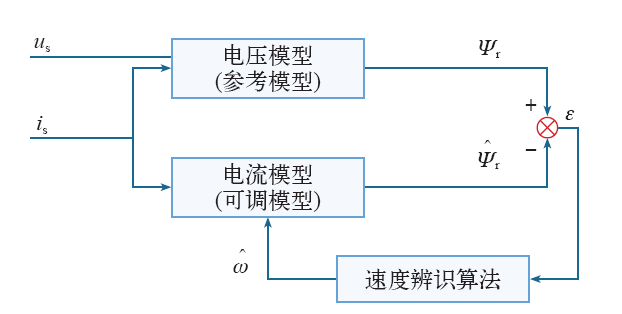
3.1 模型参考自适应系统原理
图2
3.2 基于定子磁链的模型参考自适应
由于直接转矩控制不涉及转子磁链,而基于转子磁链的MARS需要观测转子磁链,这不仅增加了系统的复杂性,且与直接转矩控制的主要优点相背离。
基于定子磁链模型的MARS无需对转子磁链、转子电流等进行观测。当误差方程趋于零时,估计定子磁链值可看作实际磁链值,直接用在直接转矩系统后续的磁链控制中。计算相对简单,较大程度地降低了系统的复杂性[14]。具体推导过程为
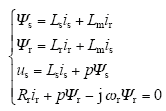
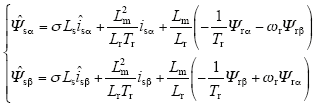
由式(1)可得异步电机定、转子磁链和电压方程为
其中, 
对式(2)两边求导,得
联立式(1)、式(3)可得
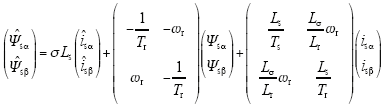
其中,Lσ = LrLs - Lm2 。Lm为定、转子间的互感系数;Ls为定子绕组的电感系数;Lr为转子绕组的电感系数。
定子磁链表达式为
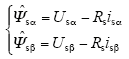
将式(5)代入式(4),可得
式中,Rr为转子电阻;Rs为定子电阻。
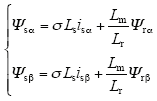
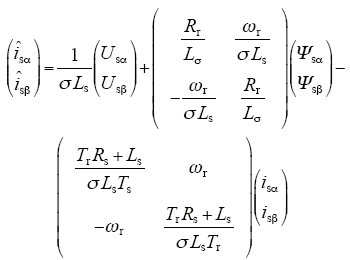
整理式(4)和式(6),即得基于定子侧的以定子电流和定子磁链为状态量的可调模型[15]为
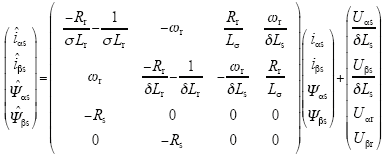
由可调模型推导模型参考自适应的自适应率为

式中,iαs、iβs可由直接测量电机定子电流值得到; $\hat{i}_{\alpha s}$、$\hat{i}_{\beta s}$、$\hat{\Psi}_{\alpha s}$、$\hat{\Psi}_{\beta s}$可由上述可调模型计算得到。基于定子磁链MARS的框图如图3所示。
图3
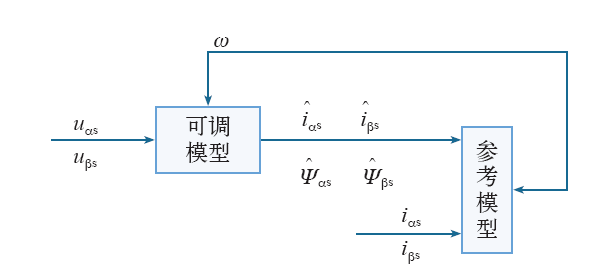
图3
基于定子磁链的模型参考自适应系统框图
Fig.3
The block diagram of model reference adaptive system based on stator flux
3.3 改进定子磁链MARS中磁链观测器部分
以上完全基于定子侧模型MARS的方法中涉及到定子磁链的计算,使用纯积分器造成定子磁链观测器产生直流偏置误差和初始积分误差[16]。改进方法采用低通滤波器替换纯积分器,可消除部分直流误差信号。
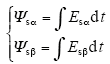
模型中定子磁链计算式为
采用一阶低通滤波器替代纯积分器,输入输出关系为
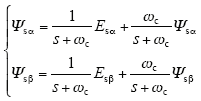
式中,ωc为截止频率。使用低通滤波器消除了积分初值的误差,减小了系统直流偏移,磁链环宽变窄,避免了转矩波动和电机转子振动[17]。
3.4 改进的感应电机直接转矩控制系统结构
图4
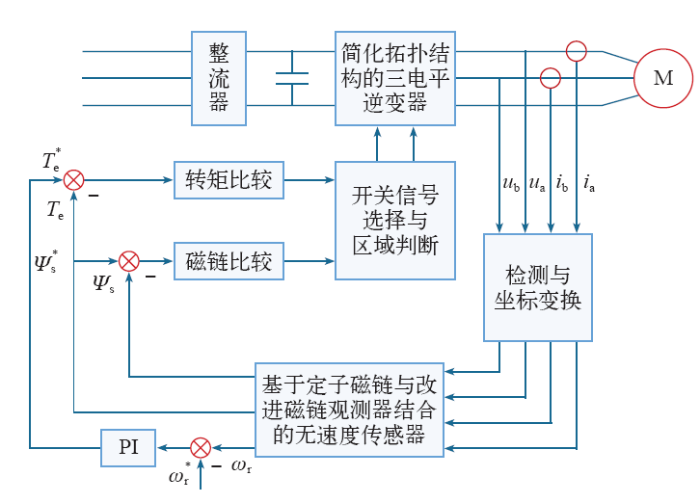
图4
改进的感应电机直接转矩控制系统
Fig.4
The improved direct torque control system of induction motor
4 仿真实验
为验证以上分析,在Simulink环境下进行仿真实验。其中逆变器的直流母线电压Ud = 400V,磁链给定值Ψ* = 0.2Wb。感应电机参数为:极对数np = 4;定子电阻Rr = 2.473Ω;转子电阻Rs = 2.473Ω;电感Ld = Lq = 0.991mH;转子磁链Ψf = 0.215Wb;转动惯量J = 0.8×10-4kg·m2;摩擦系数B = 0。
图5分别是传统DTC系统和改进DTC系统在给定参考定子磁链幅值为0.2Wb时的定子磁链轨迹。
图5
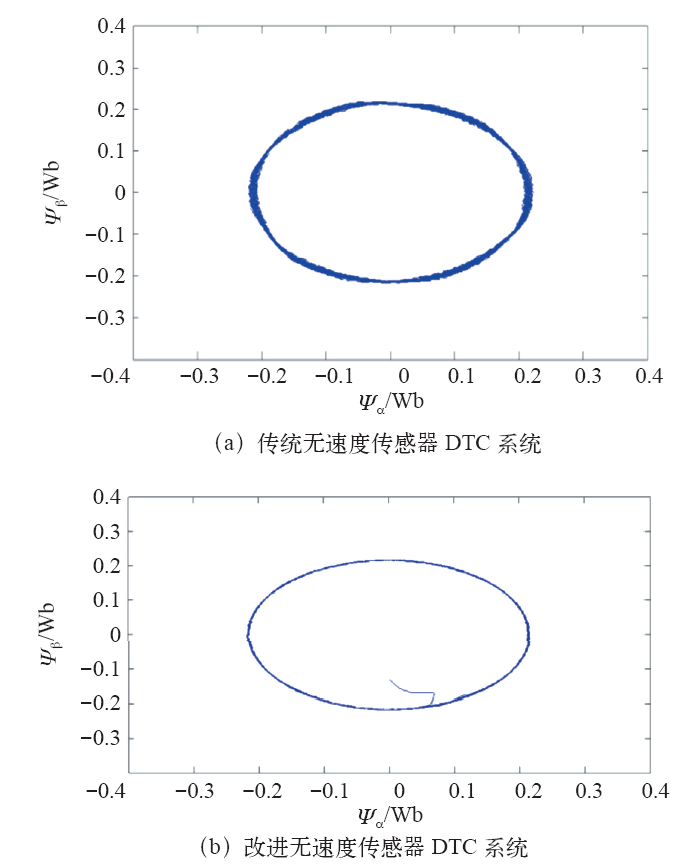
图5表明,在磁链圆给定实际半径幅值为0.2Wb时,传统DTC系统磁链圆半径在0.215Wb处波动;改进磁链观测器DTC系统定子磁链圆半径为0.2Wb,环宽变窄。这说明低通滤波器能有效消除直流偏移量对磁链的影响,减小定子磁链脉动,使定子磁链圆环宽度变窄,磁链观测值更加精确。
图6为给定转速在0.1s时从50r/min跳变到500r/min、转矩在0.2s由4N·m跳变到10N·m时,分别采用传统DTC系统和改进DTC系统得到的电磁转矩响应曲线。
图6
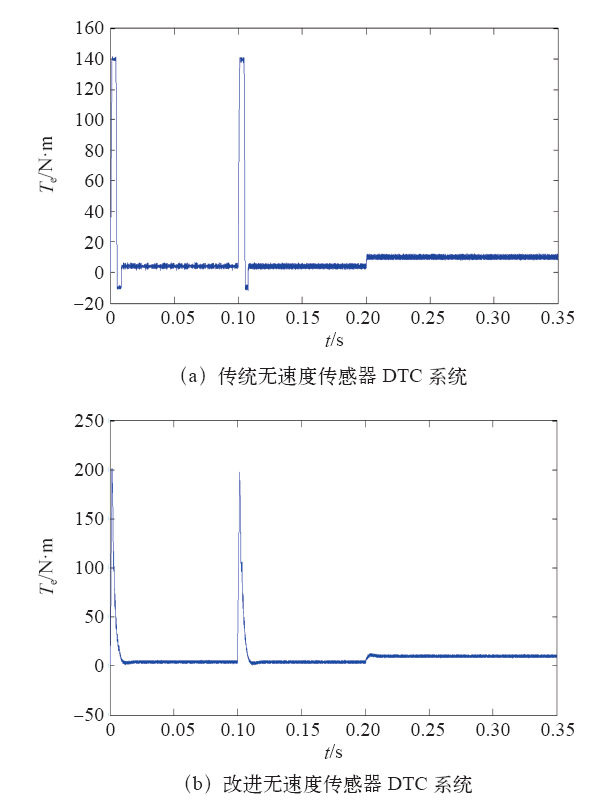
图6表明,系统在0.2s突加负载时,相比传统DTC系统,改进DTC系统输出电磁转矩脉动减小,转矩的动态响应加快,在外界增加干扰条件下仍能保持比较好的控制效果。这说明改进系统通过准确补偿磁链和转矩的偏差,增强了系统的抗干扰性,实现了磁链和转矩的精确控制。
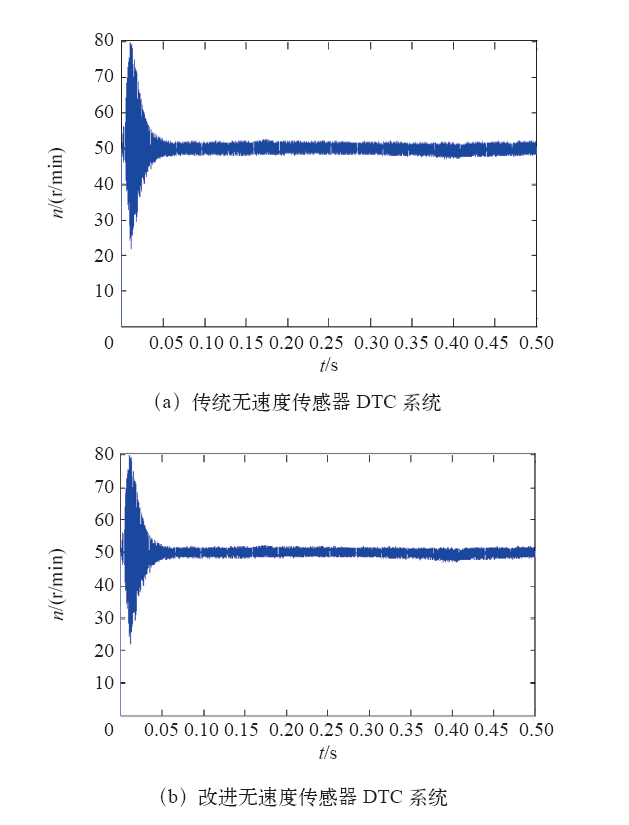
将系统初始转速设定为50r/min低速运行模式。图7分别为传统无速度传感器DTC系统和改进DTC系统的低速响应曲线。
图7
将系统初始转速设定为1 000r/min高速运行模式。图8分别为传统DTC系统和改进DTC系统的高速响应曲线。
图8
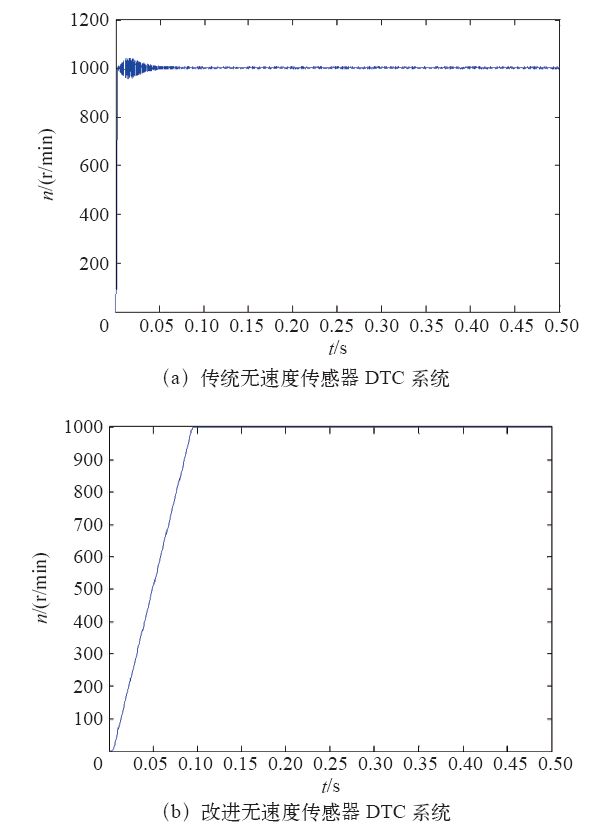
表3 低速性能指标对比
Tab.3
| 超调量(%) | 调节时间/s | 稳态误差(%) | |
|---|---|---|---|
| 传统 DTC系统 | 60 | 0.05 | 10 |
| 改进DTC系统 | 0.1 | 0.001 | 0.001 |
表4 高速性能指标对比
Tab.4
| 超调量(%) | 调节时间/s | 稳态误差(%) | |
|---|---|---|---|
| 传统DTC系统 | 5 | 0.07 | 3.3 |
| 改进DTC系统 | 0.01 | 0.09 | 0.001 |
以上几种运行状况的仿真实验,验证了三电平逆变器的感应电机直接转矩控制无速度传感器系统的可行性,且系统动态响应加快,抗干扰能力加强。在工程中应用可较大程度地节省开支,克服各种工况扰动,具有很好的实际应用价值。
5 结论
通过仿真实验,证明了改进感应电机直接转矩控制系统控制策略的有效性。改进的三电平供电技术节省了电力电子器件使用成本;改进的磁链观测器明显降低了直流偏移量对系统的干扰,磁链误差更小,为后续速度计算提供良好的基础数据;基于定子磁链的无速度传感器相比基于转子磁链的无速度传感器较大程度地简化了系统结构,提高了系统的抗干扰能力。整个系统在工程应用中的价值得到提升,具有一定的理论和工程应用意义。
参考文献
三电平逆变器异步电动机直接转矩控制系统——单一矢量法
[J].
Direct torque control system of induction motor for three level inverter single vector method
[J].
三电平逆变器异步电动机直接转矩控制系统合成矢量法
[J].
Direct torque control system for induction motor with three level inverter synjournal vector method
[J].
一种具有中点平衡功能的三电平异步电机直接转矩控制方法
[J].
对三电平逆变器供电异步电机直接转矩控制(DTC)系统进行了研究。以固定合成矢量为基础,提出了一种三电平异步电机DTC控制方法,并使用基于三相输出电流方向及中点不平衡方向检测的中点平衡Bang-Bang控制方法来控制中点电位平衡。使用文中的DTC方法,可以抑制三电平直流侧中点不平衡,限制输出电压dv/dt,减小开关损耗,同时获得良好的电机调速特性。实验结果证明了该控制方法的可行性。
A direct torque control method for three level induction motors with neutral point balancing function
[J].对三电平逆变器供电异步电机直接转矩控制(DTC)系统进行了研究。以固定合成矢量为基础,提出了一种三电平异步电机DTC控制方法,并使用基于三相输出电流方向及中点不平衡方向检测的中点平衡Bang-Bang控制方法来控制中点电位平衡。使用文中的DTC方法,可以抑制三电平直流侧中点不平衡,限制输出电压dv/dt,减小开关损耗,同时获得良好的电机调速特性。实验结果证明了该控制方法的可行性。
基于无速度传感器的直接转矩控制系统优化
[J].<p>针对传统异步电机直接转矩控制系统在低速运行状态下存在磁链轨迹发生波动、转矩脉动大的问题,提出一种新型异步电机直接转矩控制策略。采用滑模控制和空间矢量脉宽调制技术(SVPWM: Space Voltage Pwlse-Width Modulation), 引入滑模控制器, 以提高系统对参数变化和外界干扰的鲁棒性。利用空间电压矢量脉宽调制技术产生系统所需要的任意期望空间电压矢量, 使磁链轨迹更趋近于圆形, 即降低了转矩和磁链脉动,又增强了系统的鲁棒性。同时引入无速度传感器技术, 以提高系统工程应用性。通过在Matlab/ Simulink软件仿真结果表明, 新型直接转矩控制系统改善了磁链轨迹波动并有效地降低了转矩脉动, 使转速估计具有较高精度。</p>
Optimization of direct torque control system based on speed sensorless
[J].<p>针对传统异步电机直接转矩控制系统在低速运行状态下存在磁链轨迹发生波动、转矩脉动大的问题,提出一种新型异步电机直接转矩控制策略。采用滑模控制和空间矢量脉宽调制技术(SVPWM: Space Voltage Pwlse-Width Modulation), 引入滑模控制器, 以提高系统对参数变化和外界干扰的鲁棒性。利用空间电压矢量脉宽调制技术产生系统所需要的任意期望空间电压矢量, 使磁链轨迹更趋近于圆形, 即降低了转矩和磁链脉动,又增强了系统的鲁棒性。同时引入无速度传感器技术, 以提高系统工程应用性。通过在Matlab/ Simulink软件仿真结果表明, 新型直接转矩控制系统改善了磁链轨迹波动并有效地降低了转矩脉动, 使转速估计具有较高精度。</p>
一种快速三电平逆变器SVPWM算法
[J].
A fast SVPWM algorithm for three level inverter
[J].
一种新型的三电平逆变器拓扑结构研究
[J].
A new type of three level inverter topology research
[J].
基于改进自抗扰控制的永磁同步电机无传感器系统研究
[J].
Research on sensorless system of PMSM based on improved active disturbance rejection control
[J].
基于直接转矩控制的高性能磁链观测与速度观测
[J].
High performance flux linkage observation and speed observation based on direct torque control
[J].
基于三电平变流器的PMSM无速度传感器控制研究
[J].
Study on speed sensorless control of PMSM based on three-level inverter
[J].
基于SVPWM的变参数MRAS速度辨识模型仿真与研究
[J].
Research and simulation of varying parameters MRAS speed identification mode1 based on SVPWM
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}