


1 引言
异步电机的主要参数包括定子电阻、转子电阻、定子漏感、转子漏感和定转子之间互感。目前,异步电机的参数辨识主要分为离线和在线辨识[3]。在线辨识的算法主要有神经网络算法、遗传算法等。以上方法能对电机参数进行实时整定,提高控制系统的精度,但同时存在一定的缺点。如扩展卡尔曼滤波法需要给定系统噪声且算法较为复杂;遗传算法难以处理非线性约束,稳定性较差,所以在线辨识在实际应用中非常困难[4,5,6,7,8]。离线辨识的传统方法是空载实验和堵转实验[9],它能准确地测量电机参数,但由于受到现场条件的限制,不适合变频调速系统。基于此,学者们提出了许多离线自动辨识方法[11,12,13,14,15],文献[11]采用脉冲电压法和脉冲电流法,但数据处理方法略显复杂。文献[12]基于间接矢量控制系统进行参数辨识,对直流实验做了一些改进,但总漏感通过估算得到,因此会引入积累误差。文献[13]在空载实验时提出转差频率控制,能消除开环时可能出现的电流振荡,但需要加入定子电压传感器。文献[14]采用阶跃电压试验来消除漏感,可以消除总漏感的积累误差,但增加了测试的复杂度。文献[15]在电压重构时根据电流极性来补偿逆变器死区引起的电压误差,但计算量大。
本文在现有方法的基础上,提出了一种基于无功功率计算的异步电机定转子互感参数离线辨识方法,避免了传统互感辨识方法复杂的FFT计算过程。最后,对一台3.5kW的异步电机进行仿真和实验研究,结果证明该方法具有较高的准确性和有效性。
2 参数离线辨识
图1为异步电机驱动系统主电路,其中逆变器的三对桥臂A、B、C分别与异步电机M的三相定子绕组相连。
图1
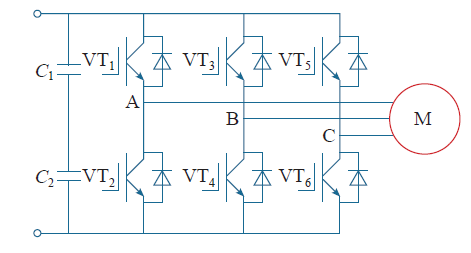
图1
异步电机变频调速主电路
Fig.1
Main circuit of variable frequency control system of asynchronous motor
2.1 直流实验
图2
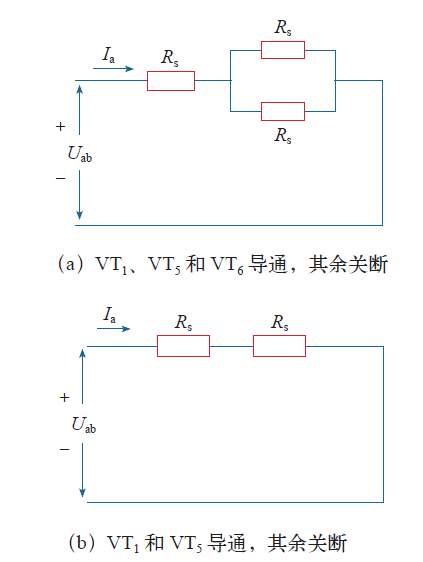
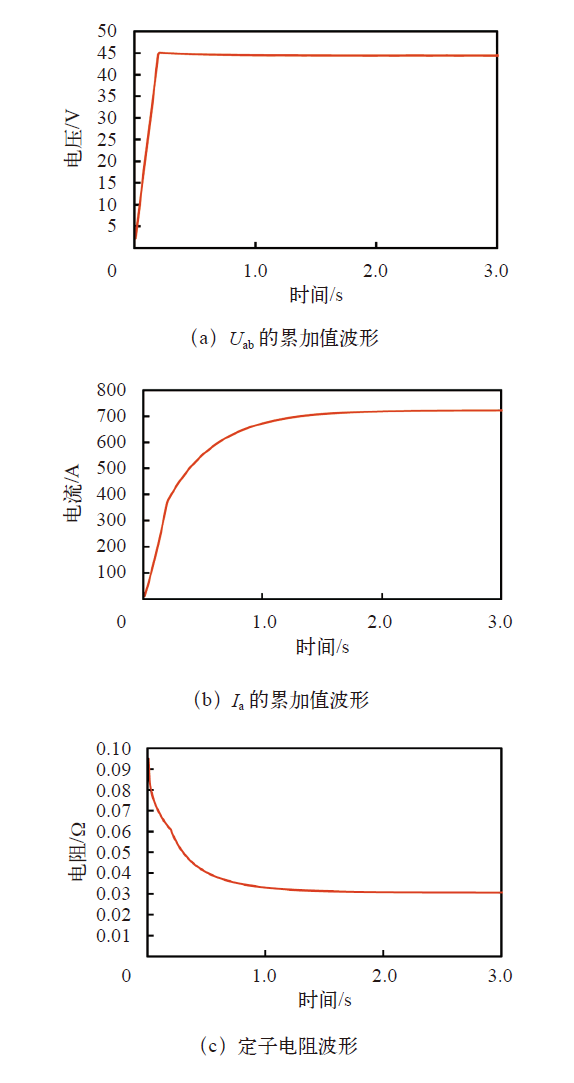
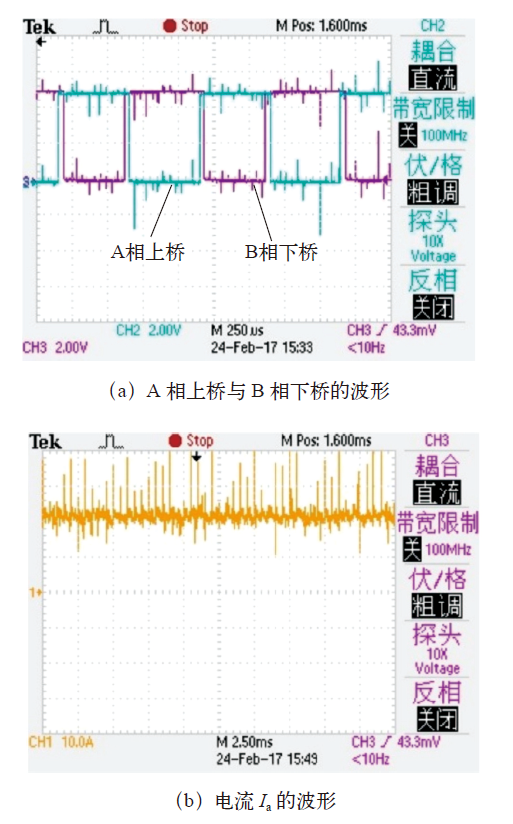
由于本文采用逆变器供电,不能直接在电机上施加直流电压,所以采用PWM斩波的方式来调节施加在电机上的电压值。通过控制6个功率管VT1~VT6的开关状态来实现定子电阻辨识。PWM斩波的占空比是A相上桥与B相下桥的占空比之差N。根据设定允许通过的最大电流来相应地改变B相的占空比,使回路电流达到设定值。
为了使计算精确,待电流稳定一段时间后,对电机的线电压和线电流进行累加,分别记为Uab和Ia,最后根据式(1)计算定子电阻。
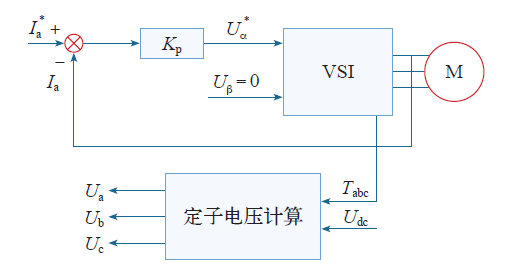
2.2 单相实验
图3
图4
其中电流给定为
式中,ωe*为给定定子电流角频率;I为电机额定线电流的有效值。
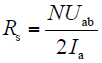
待电流稳定后,对A相和B相之间的线电压和A相的相电流进行傅里叶变换(FFT),分别得到其基波幅值Uab和Ia,同时得出基波电压和电流之间的相位差θ。
计算得等效阻抗为

等效电阻为
等效电抗为
转子电阻为
定、转子漏感为
2.3 空载试验
图5
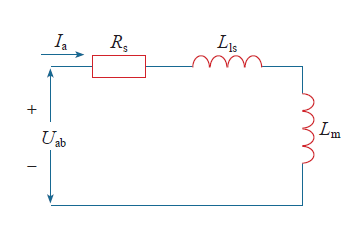
图6
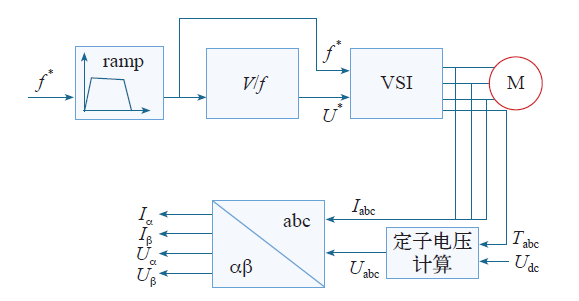
待转速稳定后,通过测得的相电压和相电流经过Clarke变换来计算出Uα,Uβ,Iα,Iβ的值,从而可以求出此时电路的无功功率Q。由于定子漏感相对于互感而言很小,计算时可以忽略,所以可以通过式(9)来计算出互感的值。

式中,Is2 = Iα2 + Iβ2;ω为电压、电流的同步角频率。
3 仿真研究
为了验证本文电机参数离线辨识方法的准确性,首先采用了Matlab/Simulink对该系统进行了仿真研究。仿真模型中所选电机为额定电压72V、额定频率100Hz、额定功率3.5kW的异步电机。
3.1 直流实验仿真
图7
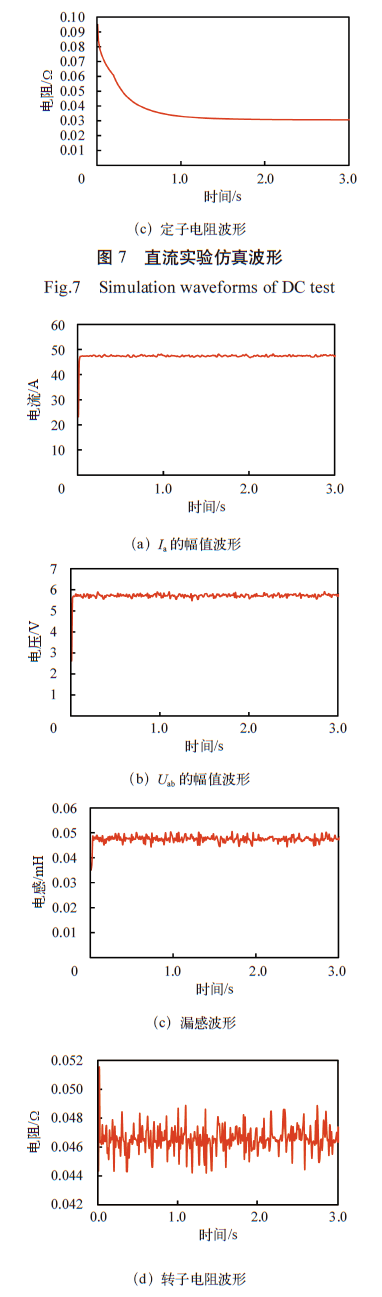
3.2 单相实验仿真
图8为单相实验仿真波形图,可以看出经过FFT计算后,Uab的幅值为5.8V,Ia的幅值为47A,最后仿真得到的转子电阻为0.047 3Ω,漏感为0.049mH。
图8
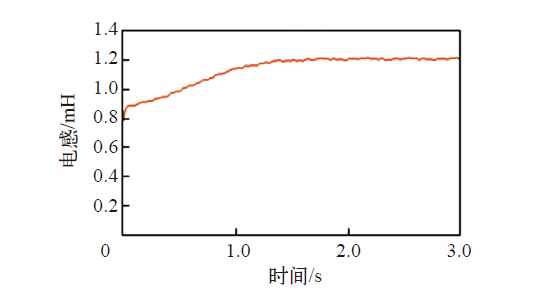
3.3 空载实验仿真
图9所示为V/f空载实验得出的电机互感波形。电机转速稳定后,仿真得到的定、转子之间互感为1.225mH。
图9
4 实验研究
本实验平台是以TI公司生产的DSP芯片TMS320F28035为核心的控制平台,实验电机额定功率为3.5kW,额定电压为72V,额定频率100Hz的异步电机。
4.1 定子电阻辨识
图10
4.2 转子电阻与漏感辨识
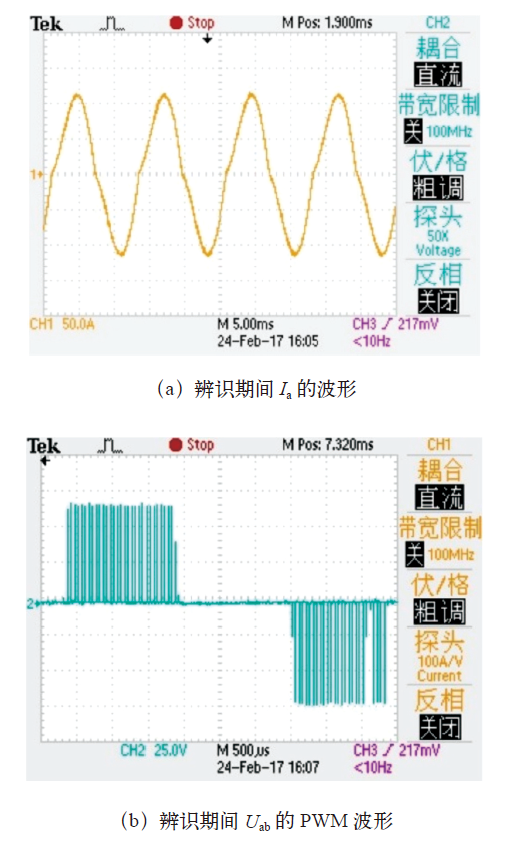
在单相交流堵转时,其A相给定电流幅值为180A,给定频率为78Hz。待电流稳定后,通过FFT变换得到Uab、Ia的幅值和其相位差θ,最后利用式(3)~式(7)计算转子电阻和漏感。图11为单相实验中A相电流和A、B相之间线电压的波形。
图11
4.3 电机互感辨识
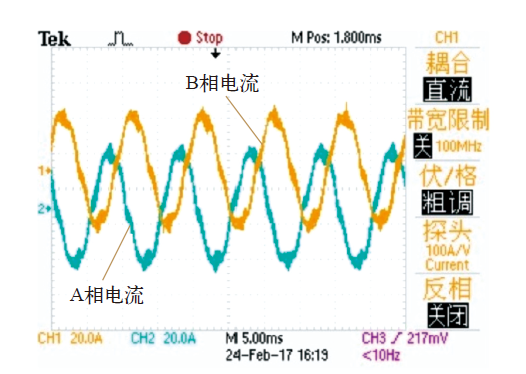
在V/f空载实验中,给定频率为100Hz,电压幅值为30V。频率稳定后,通过采样三相电压和电流来进行Clarke变换,求出无功功率后利用式(9)求出电机互感。图12为空载实验A、B相电流波形。
图12
4.4 实验结果分析
下表给出了该实验所用电机的实际值、仿真值以及实验所测值。可以发现,在误差允许范围内实验测值与实际值之间存在微小误差,原因主要如下:
表 离线辨识实验、传统实验与仿真结果
Tab.
| 电机参数 | 实际值 | 实验值 | 仿真值 |
|---|---|---|---|
| Rs/Ω | 0.0307 | 0.0298 | 0.0302 |
| Rr/Ω | 0.048 | 0.0476 | 0.0473 |
| Lls/mH | 0.05 | 0.048 | 0.049 |
| Lm/mH | 1.268 | 1.276 | 1.225 |
(1)在电压重构计算的过程中,存在死区和功率管管压降的影响。
(2)求解过程中对电机模型作了相应的近似计算。
5 结论
本文提出了一种异步电机参数离线辨识的改进算法,该法在辨识电机定、转子之间的互感时,采用了无功功率计算的方法,避免了FFT复杂的计算过程。最后对一台额定功率为3.5kW的异步电机进行了仿真和实际实验,辨识过程由系统自动完成,并且能够辨识出电机的所有参数。通过对比电机参数的实际值、仿真值和实验值,证明本文方法具有较高的精度,在工程中具有很高的应用价值。
参考文献
Electricmotor drive selection issues for HEV propulsionsystems: a comparative study
[J].
感应电动机矢量控制参数离线辨识技术
[J].
An off-line parameter estimation technique for vector controlled induction machine drive
[J].
基于TMS320F2812 的异步电机参数离线辨识系统
[J].
System of off-line parameter identification for AC motor based on TMS320F2812
[J].
Neural-network-based parameter estimations of induction motors
[J].
A fuzzy adapted field-oriented mechanism for induction motor drive
[J].
Induction motor parameter estimation using hybrid genetic algorithm
[C].
Model reference adaptive controller-based rotor resistance and speed estimation techniques for vector controlled induction motor drive utilizing reactive power
[J].
基于模型参考方法的感应电机磁链的自适应观测及参数辨识
[J].
Adaptive flux estimation and parameters identification of induction motors based on model reference approach
[J].
异步电机定转子参数的辨识方法研究
[J].
Research on parameter identification method for induction motor
[J].
基于Ansoft电动汽车用轮毂电动机电磁场分析
[J].
无速度传感器矢量控制系统中的电机参数辨识
[J].
Parameter identification of induction motor in sensor-less vector control inverter
[J].
Automatic IM parameter measurement under sensorless field-oriented control
[J].
间接矢量控制系统中的异步电机参数辨识
[J].
An off-line parameter identification method for indirect vector controlled induction motor drive
[J].
感应电机参数的离线辨识
[J].
Off-line identification of induction motor parameter
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}