

1 引言
因此,研究牵引负荷在电力系统中产生的谐波畸变并提出控制解决方案,具有十分重要的现实意义。本文在搭建变电所供电模型的基础上,采用自适应控制融合修正参数方案,解决外部干扰噪声等因素,降低或过滤电压畸变,使电力运行保持在合理的稳定区间,提高供电的质量和效率,为现场进行实测数据分析提供重要的参数支持。
2 自适应控制与数据融合
电气化铁道变电所变配电能力好坏是决定设备参数状态和供电质量的关键,为了确保电力机车得到安全可靠的电力供应,需要减小输电线路上的电能损耗及线路阻抗压降,将首端电压升高。自适应控制就是确保设备功能在误差允许范围内,自动适应控制要求和调节的过程,具有自动修复和自动适应的能力。
本文提出的自适应控制必须建立在变电所准确的模型基础上,通过传感器采集原始数据、分析参数状态,通过Matlab仿真结果对比跟踪参数修正融合。在未知传感器测量数据有任何先验知识的前提下,只靠传感器所提供的测量数据,可以计算出误差最小的数据融合值[3]。估算后均方误差小于依靠单个传感器估计的均方误差,且小于采用多传感器均值平均值估计的均方误差。
数据融合是指当变电所供电运行受到外部因素产生电压畸变率高、电压闪变和谐波电流超标时,在一定准则下加以自动分析、综合决策和估计任务而进行的信息处理过程。当系统中原始采集数据不能提供足够的准确度和可靠性时就采用综合数据融合。数据融合技术扩展了具体模型确定范围,对目标或事件的确认增加了可信度,减少了信息的模糊性[4],改善了系统的可靠性。
2.1 数据融合算法
数据融合源于将多个传感器或多源的信息进行综合优化,相对于信息表征的层次可以分为数据层融合、特征层融合和决策层融合三类。通过建立变电所数学模型对超过误差的测量参数进行修正和调节控制策略。数据层融合是直接在采集到的原始数据层上进行的融合,在各传感器的原始测报未经预处理之前就进行数据的综合和分析,利用有用信息之间的相关性,对测量数据进行融合处理,获得比算术平均值算法更准确的测量结果,消除传感器测量中的干扰及不确定性,获得更准确、更可靠的测量结果。特征层融合[5]依据数学模型进行推断并剔除不合理的参数等级,建立统一的数据库系统,从中找到类似的模型库为后期案例提供依据。决策层融合在结合前者的基础上做出最终控制策略和方法的融合,判断正确性并修正误差到最佳效果。
在测量过程中,某个甚至多个传感器测量数据偏差过大或者失效时,其他有效传感器数据能独立提供信息不受影响,系统可以依据正常传感器测量的信息获知准确的数值[6]。
本文将利用这种自适应结合数据修正融合的策略解决变电所变配电过程中出现的外部干扰造成的电压闪变、畸变率高、能量损耗大、故障参数过电流现象,找出正确的控制方案和修正策略,保持电力系统对负荷供电的安全和稳定。
2.2 自适应控制方案
由于传感器测量数据中存在着噪声和波动,变电所原始参数定义和设置根据设备状态调节,根据这些测量数据所得到的估计值也存在估计误差,然而这种估计误差是随机量,一般用均方误差来评价测量方法的好坏,由于传感器自身的均方误差影响了估计值均方误差,误差的结果需要重新评估和计算。
自适应控制模型结构如图1所示。设有m个传感器对某一对象(采集供电原始电流、电压值10组数据)进行测量,首先对Xi(i = 1,2,…,m)进行数据检验,检验准则是X1,X2,…,Xm的相邻两值之差不应超过设定误差ε。即|X2 - X1|≤ε;…;|Xm - Xm-1|≤ε。
图1
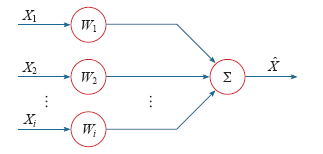
设n个传感器的方差分别为σ12,σ22,σ32,…,σn2;所要估计的真值为X,各传感器的测量值分别为X1,X2,…,Xn,它们彼此互相独立,并且是X的无偏估计,各传感器的加权因子分别为W1,W2,…,Wn,则融合后的 
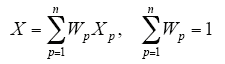
总均方误差为
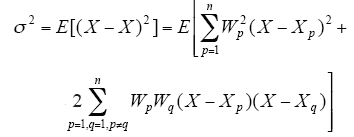
因为X1,X2,…,Xn彼此独立,并且为X的无偏估计,所以有
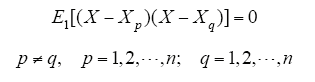
从式(4)可以看出,总均方误差σ2是关于各加权因子的多元二次函数。定义E1为测量值与均方误差差值,因此,σ2必然存在最小值。该最小值的取得是加权因子W1,W2,…,Wn满足式(4)约束条件的多元函数极值求值。
可求出总均方误差最小时所对应的加权因子为
所对应的最小均方误差为
图2
确保变电所输送的电力供应在合理区间运行和控制范围内。设置10组参数代入式(6),电压畸变保持80%~95%,补偿效果能稳定电能损耗,提高供电质量和效率。
3 建立变电所数学模型
3.1 变电所供电方式与计算
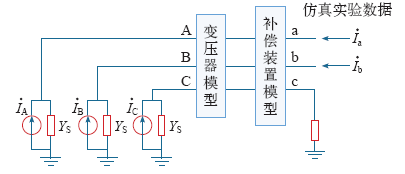
目前电气化牵引变电所通常装有并联补偿装置或滤波装置,牵引负荷属不对称的谐波源并伴有非线性特征,受输入参数影响,输出结果变化大,采用三相分析法,建立牵引变电所的三相模型如图3所示。
图3
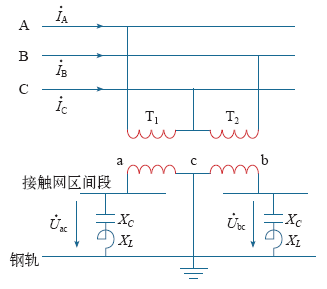
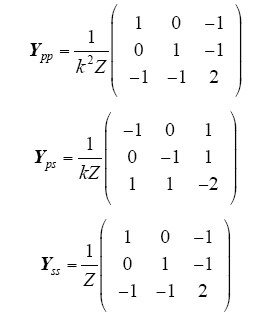
电气化牵引变电所装设两台单相V/v接线主变压器,采用V/v接线方式变配电。牵引变压器一次侧接入电力系统的两个馈线电压供电臂[8],二次侧两侧一端依次接到牵引侧的两相母线上,另一端与轨道及接地网络连接。按照V/v接线变压器的运行特征方程,当高压侧三相端子A、B、C和负荷侧三相端子a、b、c作为节点时,其节点导纳方程计算式为
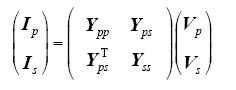
其中
假设变压器对称,有
其中,Zac-AC为绕组AC与绕组ac之间的短路阻抗。
设定c1+、c2-为负荷侧接地端子正负极(形成电源控制回路),此时节点导纳矩阵中各个子矩阵的形式为
则 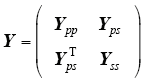
并联补偿装置的三相模型由a、b、c三个节点的节点导纳矩阵描述,当采用V/v接线牵引变压器时,基波下并联补偿装置的节点导纳矩阵为
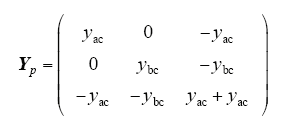
式(9)中,yac、ybc分别为接于牵引网和钢轨间的并联补偿装置的支路电阻阻值。
变电所运行数学建模中,由于设备状态和运行负荷特征,设定牵引变电所高压侧的短路容量,适合采用简化的外部电源模型[9]。当供电系统变电所的正序阻抗和负序阻抗相等时,计算可得
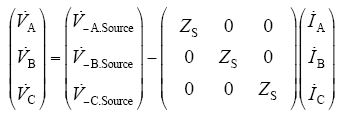
此时外部电源的外部导纳矩阵为
式中,YS = 1/ZS,ZS即为系统阻抗。
3.2 电压畸变的数据仿真原理
电压畸变是由变电所产生的不对称正弦电流、电压引起的,如果处理不及时将造成局部供电中断和接触网局部运营事故,供电质量和主变压器电压比损耗均增大,影响设备使用寿命,加大了检修难度。
上述式(11)是在基波下得到的牵引变电所节点导纳矩阵,而在谐波下对牵引变电所进行仿真计算时,式(11)中的参数需要做适当的修正[10]。对于电力系统的系统阻抗和变压器的短路阻抗,得 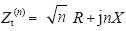
在并联补偿装置中,电容器的电容值和电抗器的电感值并不随频率的变化而变化[11]。因此,只需要知道基波参数,在进行变电所数学建模时,考虑按相应的谐波次数即可求出其在谐波下的数值。
图4
由于工频单相交流27.5kV的牵引网是一种不对称供电回路[13],当电力系统向非线性机车和不对称负荷供电时,机车负荷和设备在传送、变换、分配利用发电机供给的基波能量的同时,会将部分基波能量转换为谐波能量,向系统逆向输送大量的高次谐波,使电力系统中的电压和电流波形发生严重畸变,给电网造成了大量的谐波波动,造成严重隐患导致事故发生。
假设牵引变电所的节点导纳矩阵为Y,可列出方程组
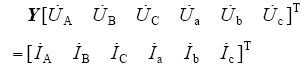
其中,A、B、C、a、b、c为变电所高压侧、负荷侧对应的各个节点。在电压畸变和谐波稳定模型下,理想电流源提供的电流为零,即 


4 Matlab仿真和实验结果分析
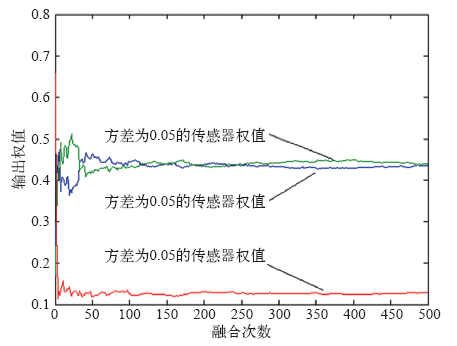
仿真条件:用三组互不相关的零均值白噪声数据来模拟3个传感器的观测误差,取真值为X = 1,先取三组白噪声的方差分别为0.05、0.10、0.30,将真值X与白噪声数据依次相加,即可模拟出三组传感器的测量数据。再用10组原始数据进行自适应控制加以验证,见下表。
表 阻抗的理论值与仿真值
Tab.
| 自适应控制融合数据的理论值与仿真值比较(采集10组数据) | |||
|---|---|---|---|
| 位置 采样数 | 仿真数据 | 理论数据 | 误差量 |
| 1 | 2.630 0+5.534 0i | 2.630 1+5.533 9i | -0.000 1+0.000 1i |
| 2 | 7.928 1+15.700 4i | 7.937 0+15.701 3i | -0.008 9-0.000 9i |
| 3 | 18.623 2+33.102 1i | 18.740 0+32.438 4i | -0.116 8+0.663 7i |
| 4 | 27.145 0+41.254 3i | 27.007 9+41.843 2i | 0.137 1-0.588 9i |
| 5 | 40.235 1+49.523 1i | 41.103 2+51.521 7i | -0.868 1-1.998 6i |
| 6 | 16.210 1+17.792 5i | 16.108 1+17.705 8i | 0.102 0+0.913 3i |
| 7 | 27.567 9+43.156 7i | 27.032 5+42.136 6i | 0.535 4+1.020 1i |
| 8 | 38.248 5+51.135 4i | 38.248 1+51.032 6i | 0.000 4+0.102 8i |
| 9 | 15.978 4+24.645 2i | 15.497 6+25.172 2i | 0.480 8-0.527 0i |
| 10 | 29.356 2+45.864 5i | 28.987 3+46.361 2i | 0.368 9-0.496 7i |
图5
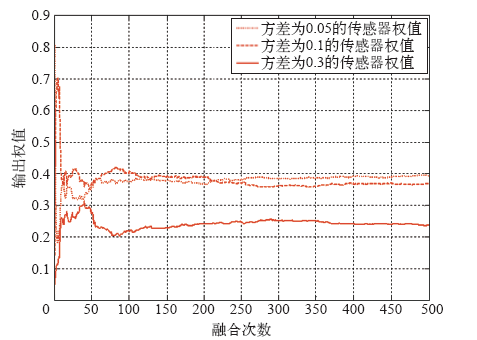
图5
采集三组原始参数干扰的权值分布曲线
Fig.5
The weight distribution curve of the interference of the original parameters of the three groups
图6
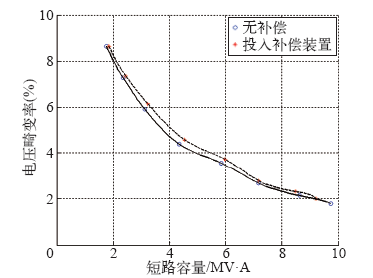
电气化铁道供电系统/变电所一次电压110kV,二次电压27.5kV;变压器的额定容量75MV·A,短路误差电压百分比10.5%;对于电容装置,设定额定电压33.6kV,额定容量3 200kvar;对于电感装置和电容特性[15],在基波下满足XL = 0.12XC。
通过对比仿真图7可知,无论对于前期数据采集状态还是投入融合算法之后,随着系统短路容量的增加,电压畸变率在不断降低,特别是当短路容量超过一定值(1 000MV·A)时,降低的趋势变得缓慢。当系统短路容量一定时,电压畸变率变化幅度随着系统短路容量的增加而减少。
图7
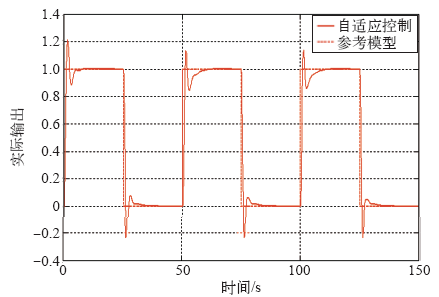
图7
自适应控制数据融合后的电压畸变率变化
Fig.7
Adaptive control data fusion and voltage distortion rate
图8
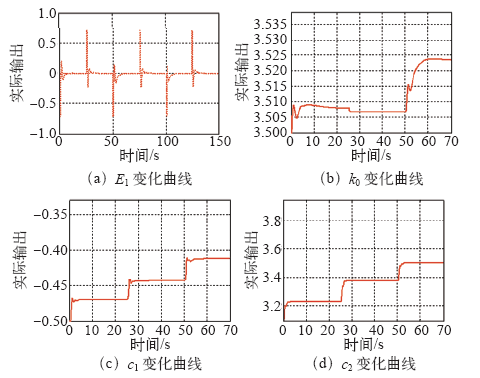
图8
数据融合逐步优化误差修正过程
Fig.8
Data fusion step by step optimization error correction process
5 结束语
本文所提出的基于自适应控制的融合数据估计算法在不知道任何传感器测量数据先验知识的条件下(无法预判电压畸变值和外部不稳定因素),可以从含有观测噪声的测量数据中得到被估计量的最小均方误差估计并加以修正。该方法不但充分利用了传感器的测量数据,还将传感器的均方误差、测量精度等信息融合进行处理,可以快速、准确地估计出真值并对比误差范围[17]。在拓展检测范围和提高测量精度等方面,估计算法可广泛地应用于处理不确定原始参数采集和计算领域。
因此,自适应控制策略和方案在本文中兼具优化修正和服务数据融合的功能,一旦控制效果在误差范围内,使用修正策略对比误差波动,减少干预能达到良好效果。因此为使外部干扰(电压畸变或噪声波动等)对变电所供电质量和安全性的影响降至最低,通常对变电所的外部电源,应考虑选择短路容量较大的电源系统。牵引变电所应该投入补偿装置,以便减少电力系统的谐波电流,保证供电的稳定和提高效率。
参考文献
适于重载电力牵引的新型供电系统的研究
[J].
Research on new power supply system for heavy haul electric traction
[J].
基于参数估计的多传感器数据融合
[J].
Multisensor data fusion based on parameter estimation
[J].
浅谈V/v 接铁路牵引变压器工作原理及运行特点
[J].
Discussion on working principle and operation characteristics of V/v traction transformer for railway
[J].
An introduction to multi-sensor data fusion
[J].
DOI:10.3390/s19245430
URL
PMID:31835407
[本文引用: 1]

Real-time, precise and low-cost vehicular positioning systems associated with global continuous coordinates are needed for path planning and motion control in autonomous vehicles. However, existing positioning systems do not perform well in urban canyons, tunnels and indoor parking lots. To address this issue, this paper proposes a multi-sensor positioning system that combines a global positioning system (GPS), a camera and in-vehicle sensors assisted by kinematic and dynamic vehicle models. First, the system eliminates image blurring and removes false feature correspondences to ensure the local accuracy and stability of the visual simultaneous localisation and mapping (SLAM) algorithm. Next, the global GPS coordinates are transferred to a local coordinate system that is consistent with the visual SLAM process, and the GPS and visual SLAM tracks are calibrated with the improved weighted iterative closest point and least absolute deviation methods. Finally, an inverse coordinate system conversion is conducted to obtain the position in the global coordinate system. To improve the positioning accuracy, information from the in-vehicle sensors is fused with the interacting multiple-model extended Kalman filter based on kinematic and dynamic vehicle models. The developed algorithm was verified via intensive simulations and evaluated through experiments using KITTI benchmarks (A project of Karlsruhe Institute of Technology and Toyota Technological Institute at Chicago) and data captured using our autonomous vehicle platform. The results show that the proposed positioning system improves the accuracy and reliability of positioning in environments in which the Global Navigation Satellite System is not available. The developed system is suitable for the positioning and navigation of autonomous vehicles.
ABB static var compensator stabilizes Namibian grid voltage
[J].
多传感器稳健融合跟踪算法
[J].
Arobust fusion algorithm based on multi-sensor tracking
[J].
A boosted particle filter: multi-target detection and tracking
[C].
同相供电系统对称补偿装置控制策略研究
[J].
Control strategy of symmetry compensation system for traction power supply system in phase
[J].
Analysis of multi-frame target detection using pixel statistics
[J].
多传感器布局和目标跟踪精度分析
[J].
Multi-sensor's geometry position and target tracking accuracy analysis
[J].
Lasseter. Statcom control for operation with unbalanced voltages
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}