


1 引言
在异步电机矢量控制中,磁链观测和电流环调节器优化都依赖电机的电气参数,其参数值测定方法已从传统的空载、堵转实验改为逆变器本身自检测[1]。现有的异步电机离线参数辨识方法通常是当电机处于静止状态下,在定子侧任意两相之间施加阶跃或正弦等激励信号,结合电机在不同激励作用下的等效电路模型,通过暂、稳态响应辨识电机参数。
传统单相交流实验大都采用电流闭环的控制策略[9],其控制器参数缺乏统一的设计方法及可供参考的经验值,本文基于PWM逆变器–电机平台,提出一种全静止状态下的异步电机离线参数辨识方法,以开环的控制策略取代了传统的电流闭环,并分析了激励频率与等效电路阻抗的关系,给出了辨识频率的选择依据,且通过叠加直流偏置的方法抬升定子电流直至其直流分量大于基波分量幅值,有效解决了死区的影响,最后通过实验验证了该方法的有效性。
2 异步电机参数辨识模型
图1为异步电机T-I型等效电路,U1为定子相电压;I1、I2为定子和转子电流;Im为励磁电流;Rs、Rr为定子和转子电阻;Ls为定子电感;Lm为互感;σLs为总漏感;s为转差率;a = Lm/Ls。需要辨识的参数包括Rs、Rr、Lm和σLs。
图1
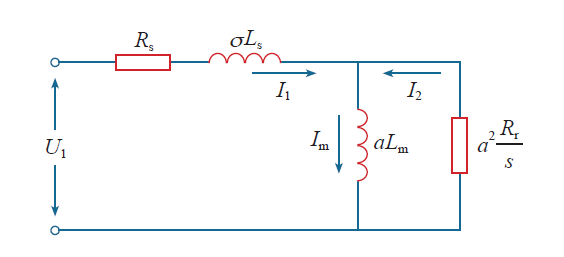
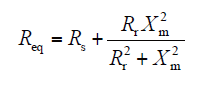
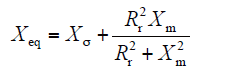
表1 注入电流频率与等效电路阻抗关系
Tab.1
| 频率/Hz | 0 | 0.1 | 3 | 50 |
|---|---|---|---|---|
| 近似条件 | Xm′ =Xσ = 0 | Xm′<<Rr′ | Xm′ ≈Rr′ | Xm′>>Rr′ |
| Req | Rs | Rs | Rs + $\frac{R'^{2}_{r}X'^{2}_{m}}{R'^{2}_{r}+X'^{2}_{m}}\qquad$ | Rs + Rr |
| Xeq | 0 | Xσ + Xm′ | Xσ + $\frac{R'^{2}_{r}X'_{m}}{R'^{2}_{r}+X'^{2}_{m}}\qquad$ | Xσ |
3 异步电机参数辨识算法
3.1 单相交流实验
参数辨识控制框图如图2所示。图中,f0为指令频率;uaubuc为指令电压,其中u0为直流偏置电压,um1为交流分量幅值,ω为指令角频率;i为A相定子电流,I0和|Im1|分别为i的直流分量和基波分量幅值;sasbsc为逆变器三相桥臂开关管的驱动信号;Udc为直流母线电压。
图2
3.2 参数辨识算法
异步电机参数辨识算法如图3所示,A、B相之间施加正弦电压激励,同时采样定子电流,并通过离散傅里叶变换分离出定子电压和电流的基波幅值以及相角。由激励信号u和响应信号i结合该激励频率下电机近似过后的等效电路计算电机各参数。
图3
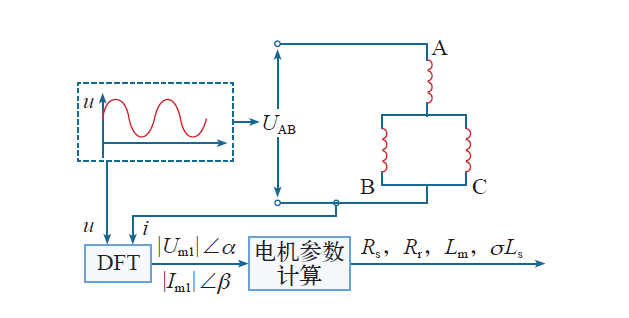
图3
参数辨识算法示意图
Fig.3
The schematic diagram of the algorithm of parameters estimation
图3中,DFT计算公式为
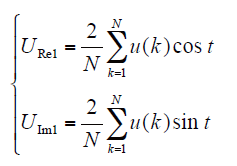
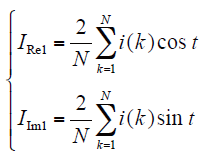
式中,URe1、UIm1为定子电压基波分量的实部和虚部;IRe1、IIm1为定子电流基波分量的实部和虚部;N为离散傅里叶变换的周期,N = fc /f0,fc为载波频率,f0为指令频率;t = -2(k-1)/N。则定子电压、定子电流的基波幅值及相角分别为
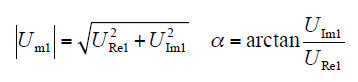
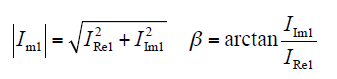
由反切函数计算得到的角度α, β ∈ (-π /2,π/2),而实际电压电流的相角其范围应为[0,2π]。因此,应按下述方法对原计算角度值修正:当UIm1<0,α = α + π;同理,当IIm1<0,β = β + π。修正以后,α, β ∈ (-π /2,π/2)∪(π/2,3π/2)。
3.3 电机参数计算
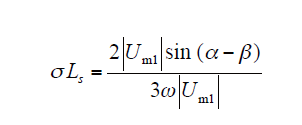
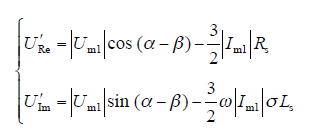
当激励频率在转差率附近时,结合式(4)、式(5)和式(6)可得到互感两端基波电压的实部和虚部为
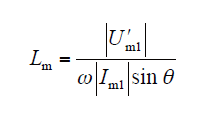
根据式(4)、式(5)和式(7)可得到互感两端基波电压的幅值和相角,则可计算出互感和转子电阻
4 实验验证
实验平台为以TMS320F28062 DSP为主控制器的通用变频器,采用以上参数辨识方法编写控制程序。待辨识电机铭牌参数:额定功率,37kW;额定定子线电压,380V;额定定子线电流,70.4A;额定转速,1 480r/min;极对数,2。直流侧电压,300V;开关频率,3kHz;死区时间,2.5μs。辨识过程遵循的顺序是:①Rs。②σLs。③Lm和Rr。指令频率依次为0Hz、50Hz和0.8Hz,参数辨识波形如图4所示。
图4
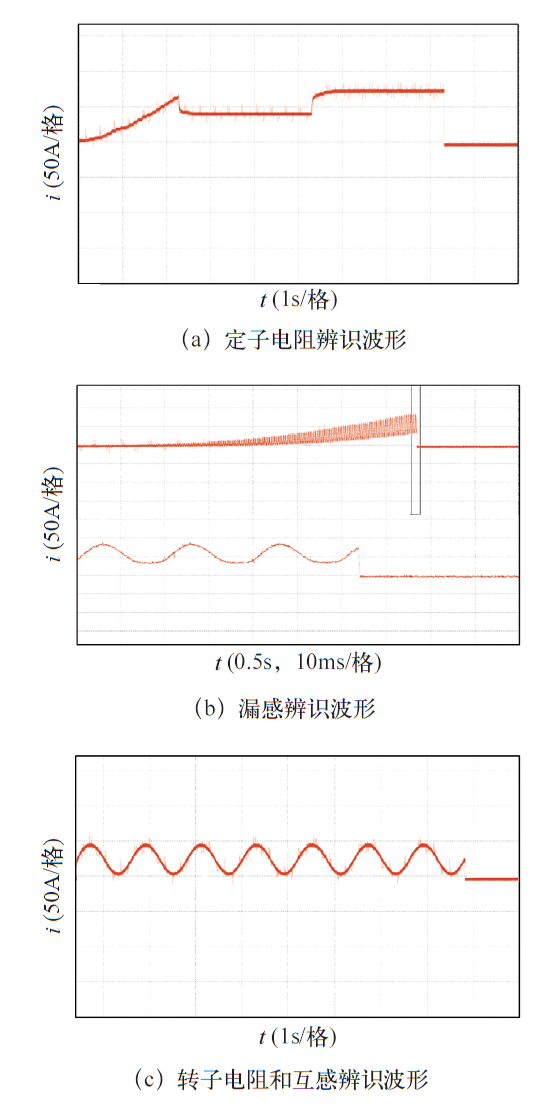
图4
电机参数辨识实验波形
Fig.4
Experimental waveforms of parameter estimation for induction motor
表2 电机参数辨识结果
Tab.2
| 参 数 | 真实值 | 辨识值 | 误差(%) |
|---|---|---|---|
| Rs/mΩ | 86.0 | 85.7 | 0.35 |
| σLs/mH | 2.41 | 2.42 | 0.41 |
| Rr/mΩ | 53.7 | 52.0 | 3.17 |
| Lm/mH | 28.9 | 29.6 | 2.42 |
5 结论
本文基于PWM逆变器–电机平台,在异步电机全静止状态下离线辨识参数,选取了合适的辨识频率,并在不同频率下对电机等效电路近似处理,推导出电机各个参数的计算公式,同时采取了交流叠加直流的方式有效解决了死区对参数辨识结果的影响,最后实验结果表明电机所有参数的辨识误差小,验证了辨识算法的有效性。
参考文献
矢量控制系统中异步电机参数的估算和测量
[J].
Parameter estimating and measuring of induction motors for vector control systems
[J].
感应电动机矢量控制参数离线辨识技术
[J].
An off-line parameter estimation technique for vector controlled induction machine drive
[J].
Parameter estimation of inverter and motor model at standstill using measured currents only
[J].
A frequency-based determination of transient inductance and rotor resistance for field commissioning purposes
[J].DOI:10.1109/28.502169 URL [本文引用: 1]
Identification of induction motor equivalent circuit parameters using the single-phase test
[J].DOI:10.1109/60.749147 URL [本文引用: 1]
Automatic induction machine parameters measurement using standstill frequency-domain tests
[J].DOI:10.1049/iet-epa:20060512 URL [本文引用: 1]
基于自适应补偿的异步电机静止参数辨识方法
[J].
在异步电机调速系统中,电机参数的精度直接影响着系统的控制性能。为了获得准确的电机参数,提出了一种异步电机在静止状态下的参数辨识方法。采用了一种自适应的方法对器件的非线性进行补偿,从而提高了算法的辨识精度和鲁棒性。考虑到电机的磁滞效应对电机互感的影响,在传统单相交流实验的基础上叠加1个直流电流,利用此直流电流先将电机磁场激励起来,从而准确地辨识出电机在额定励磁情况下的互感值。最后实验证明了此方法可以准确辨识出电机的全部参数。
Parameters estimation of induction motors at standstill with adaptive nonlinearity compensation
[J].在异步电机调速系统中,电机参数的精度直接影响着系统的控制性能。为了获得准确的电机参数,提出了一种异步电机在静止状态下的参数辨识方法。采用了一种自适应的方法对器件的非线性进行补偿,从而提高了算法的辨识精度和鲁棒性。考虑到电机的磁滞效应对电机互感的影响,在传统单相交流实验的基础上叠加1个直流电流,利用此直流电流先将电机磁场激励起来,从而准确地辨识出电机在额定励磁情况下的互感值。最后实验证明了此方法可以准确辨识出电机的全部参数。
异步电机参数离线辨识改进算法
[J].
An improved off-line parameter identification algorithm for induction motors
[J].
Parameter estimation of an induction machine using a dynamic particle swarm optimization algorithm
[C].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}