

1 引言
2 直流飞轮电池系统主电路拓扑结构
本文设计的直流飞轮电池系统主要由五部分组成:电机端功率变换器、励磁电容、DC-DC变换器、集成飞轮的开关磁阻电机以及控制系统。飞轮电池的拓扑结构及其在光伏发电中的应用如图1所示。
图1
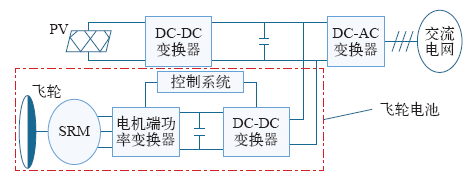
图1
飞轮电池结构及在光伏电站中应用示意
Fig.1
Structure of flywheel battery and its application in photovoltaic power station
图2
为了保证控制的灵活性以及电机调速范围的宽广性,电源端功率变换器采用如图3所示的结构,其主要作用有:①使电机通电或者与电源断开。②为绕组提供续流回路。③通过功率电子器件的开通或关断控制绕组中电流的大小。
图3
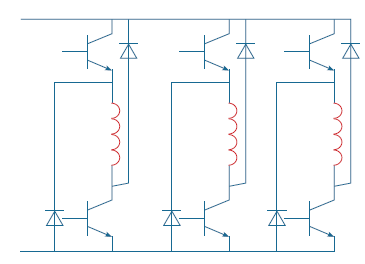
系统的工作方式为:充电时,控制系统通过控制DC-DC变换器的功率以及电机功率变换器开关使得直流电源能量注入到电机,电机加速旋转,将电能转化为飞轮的动能储存起来;放电时,控制系统将会控制电机减速,并通过DC-DC变换器的调压功能输出稳定的电压,供外部负载使用。
3 飞轮电池储能控制策略
SRM在起动和低速运行时,由于电机反电动势小,绕组的电流将很快上升到较大值,为保护功率开关元件和电机,需考虑限流措施。应用电流滞环控制可将电机的绕组电流限制在安全范围内。
3.1 直流充电控制策略
在DC-DC变换器稳定机端功率变换器输入电压的前提下,检测DC-DC变换器的输入电流与参考电流进行比较,应用PI调节器对机端功率变换器的功率开关进行PWM控制,即通过电流斩波实现直接功率控制。为了加快功率的响应速度,减小稳态响应波动及误差,本文同时采用固定关断角θoff,改变开通角θon角度位置的控制策略。
具体的飞轮电池充电控制策略如图4所示。
图4
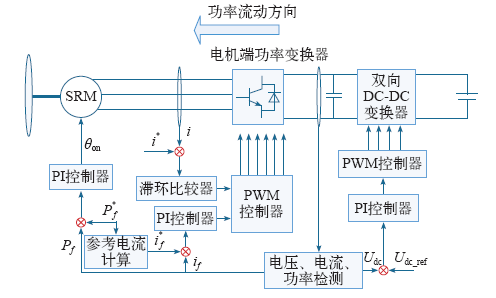
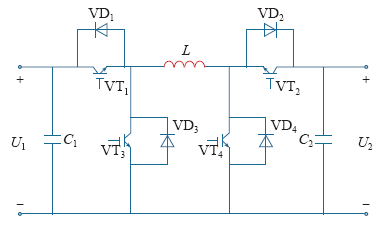
当电池输入电压高于电机额定电压时,图2中的功率开关VT2保持开通状态,VT3、VT4始终保持关闭状态,通过PI调节器以及PWM控制器对VT1的开关状态进行控制,完成降压斩波控制;当输入电压低于额定电压时,图2中的功率开关VT1保持开通状态,VT2、VT3始终保持关闭状态,通过PI调节器和PWM控制器对VT4的开关状态进行控制,完成升压斩波控制。通过滞环控制器完成对电机低速运行时的电流斩波控制。通过参考功率计算参考电流,采用PWM控制完成电流斩波控制(CCC),进而实现对功率的控制;同时,采用PI控制器调节开通角θon,实现角度位置控制(APC),APC与CCC结合控制可以加快电池对参考功率的响应速度,并有更平稳的稳态输入、输出功率。
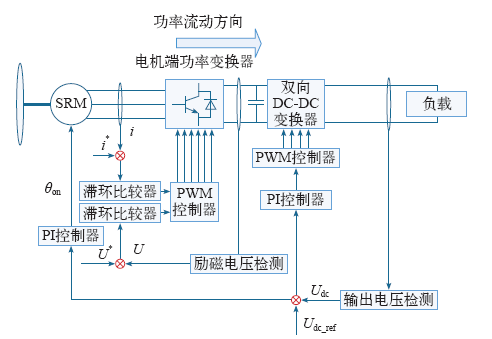
3.2 直流放电控制策略
飞轮电池放电控制框图如图5所示。通过电压滞环控制维持励磁电容电压的基本恒定。使用角度位置控制与电压PWM斩波控制相结合的方法控制输出电压的幅值。同时,将电机绕组电流i与参考电流i*进行比较,通过滞环控制器完成对电机低速运行时的电流斩波控制。具体来说,若要求输出电压高于电机额定电压,图2中的功率开关VT2保持开通状态,VT1、VT4始终保持关闭状态,通过PI调节器和PWM控制器对VT3的开关状态进行控制,完成输出电压控制;当需要输出电压低于电机额定电压时,图2中的功率开关VT1保持开通状态,VT3、VT4始终保持关闭状态,通过PI调节器以及PWM控制器对VT2的开关状态进行控制,完成降压斩波控制;同时采用PI控制器调节开通角θon,通过角度位置控制完成输出功率控制。
图5
4 仿真分析
在Matlab中,建立了基于三相6/4极SRM的飞轮电池系统仿真模型,电机额定电压为240V,电流滞环的参考值为210A,滞环宽度为±10A,飞轮转动惯量J = 0.1kg·m2,DC-DC变换器主要参数C1 = 1mF,C2 = 5mF,C2兼具电机励磁电源功能,L = 1mL。
充电仿真实验:固定关断角 = 75°,设在0~3s内飞轮运行在储能阶段,充电电压为400V,拟输入功率4.8kW;在3~4s内飞轮电池处于待机状态;在4~7s内飞轮电池再次运行在储能阶段,充电电压为120V,拟输入功率2.4kW。系统仿真结果如图6所示。
图6
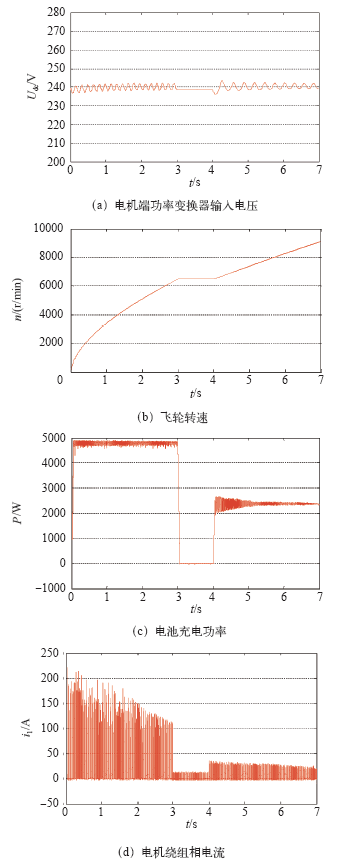
由图6可知,输入直流电压在小于电机额定电压以及大于电机额定电压的情况下,电机端输入电压维持在(240±10)V区间内,飞轮电池都能保证良好的运行,转速上升平稳。在1~3s和5~7s内,电池输入功率基本达到稳态,距参考输入功率误差均小于5%。
放电仿真实验:设在0~5s内飞轮电池运行于储能阶段,固定关断角为75°,充电电压为400V,输入功率7.2kW;在5~6s内飞轮电池处于待机状态;在6~9s内飞轮电池放电,输出电压300V,带电阻型负载30Ω;在9~10s内再次进入待机;在10~15s内飞轮再次放电,固定关断角40°,输出电压100V,负载为3Ω电阻。仿真结果如图7所示。
图7
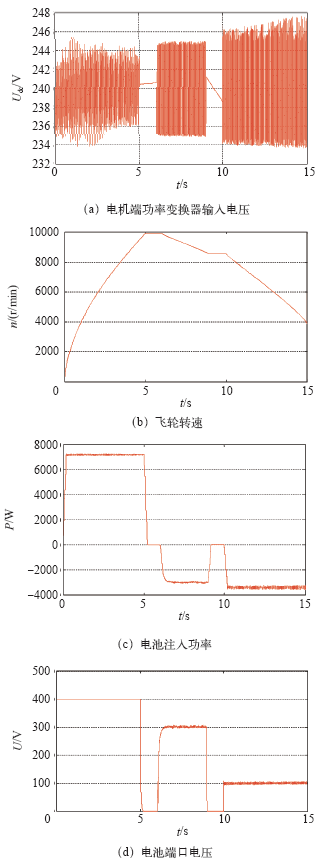
由图7可知,在6~9s内,电池输出电压基本稳定在300V,稳定后最大偏差在3%以内;在10~15s内,电池输出电压平均值为100V,稳态偏差在5%以内,基本符合工程实践要求;电机端口电压维持在(240±10)V间,励磁电压基本稳定;飞轮转速在1~5s内平稳上升,在5~6s以及9~10s内,转速维持恒定,在6~9s及10~15s内,转速下降,与仿真条件相符合。
图8
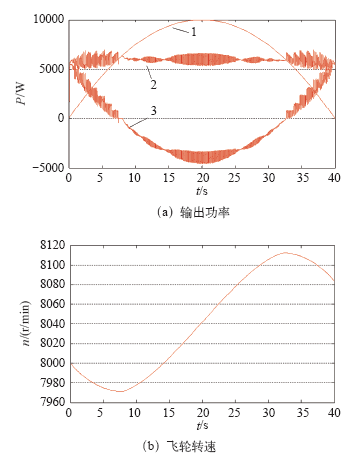
飞轮电池应用于光伏发电仿真实验:由于正常一天的光照强度近似呈反抛物线形状,这里用如图8a中的曲线1近似模拟一天中光伏发电站输出的有功功率,设0s时为光伏电站开始发电的时刻,50s为日照低到系统停止发电的时刻,光伏系统最大发电功率为10kW,飞轮电池接到直流母线上,设直流母线电压为300V。仿真参数如下:飞轮初始转速为8 000r/min,飞轮转子转动惯量为10kg·m2,计划通过飞轮电池引入使得光伏-飞轮电池联合系统输出有功功率较为平稳,维持在6kW左右。仿真结果如图8所示:图8a中曲线2为光伏-飞轮电池联合发电系统输出总的有功功率;曲线3为飞轮电池充放电功率,其为正时表示飞轮电池放电,为负时表示电池处于充电状态;图8b为飞轮转子的转速。
由图8可知,在0~7.35s内,光伏发电系统输出功率小于6kW,飞轮电池释放能量,电机迫使飞轮减速;在7.35~32.75s内,光伏发电系统输出功率大于6kW,飞轮电池吸收能量,电机驱动飞轮加速运行。在无飞轮电池装置的情况下,光伏发电站输出的有功功率在0~10kW范围内波动,采用飞轮电池后,有功功率输出围绕着6kW波动,但是波动幅度对比无飞轮电池情况显著减小,起到了功率平滑的作用。
5 结论
本文设计了一种双向自动升降压DC-DC变换器,用于基于SRM的飞轮电池系统,它在完成能量双向流动功能的同时,使得电池输入输出电压可以有较多的选择等级,增强了飞轮电池的适用场合。且变换器当中的一个电容元件同时充当SRM的励磁电源功能,简化了系统的结构并降低了电池成本。同时,为提高系统的动态响应和稳态精度,充电时,本文使用了电流斩波方式及角度位置控制两者结合的控制方式;放电时使用了角度位置控制结合电压斩波控制的方法。通过仿真,验证了本文所述飞轮电池充放电控制策略的有效性以及应用于光伏发电系统的可行性,为下一步实际应用奠定了基础。
参考文献
关于我国可再生能源发电的问题分析及对策研究
[J].
Research on existing problems in power generation by generable energy source and its corresponding countermeasure
[J].
飞轮储能关键技术及其发展现状
[J].飞轮储能是一种研究价值高、应用前景广阔的新型储能技术, 具有大储能容量、高效率、无污染、适用广、无噪声、长寿命、维护简单及可实现连续工作等优点, 它为解决目前广泛关注的能源问题提供了新途径。本文阐述了飞轮储能的原理和五大关键技术(包括飞轮转子、轴承支承系统、能量转换环节、电动/发电机与真空室), 并分别以五大关键技术为出发点, 详细论述了飞轮储能系统的国内外发展现状, 指出了飞轮储能关键技术的未来发展方向。
Key technologies and development status of flywheel energy storage system
[J].飞轮储能是一种研究价值高、应用前景广阔的新型储能技术, 具有大储能容量、高效率、无污染、适用广、无噪声、长寿命、维护简单及可实现连续工作等优点, 它为解决目前广泛关注的能源问题提供了新途径。本文阐述了飞轮储能的原理和五大关键技术(包括飞轮转子、轴承支承系统、能量转换环节、电动/发电机与真空室), 并分别以五大关键技术为出发点, 详细论述了飞轮储能系统的国内外发展现状, 指出了飞轮储能关键技术的未来发展方向。
可再生能源发电中的电池储能系统综述
[J].
An overview of battery energy storage system for renewable energy generation
[J].
Power smoothing using a flywheel driven by a switched reluctance machine
[J].DOI:10.1109/TIE.2006.878325 URL [本文引用: 1]
飞轮储能技术研究的发展现状
[J].
The situation of the flywheel energy storage research
[J].
储能技术在电气工程领域中的应用与展望
[J].结合我国实际情况,提出了未来电气工程学科所而临的各种新问题,论述了储能技术存解决这些问题时所能发挥的作用,讨论了目前几种常用储能技术的特点和现状,以及储能技术发展的热点问题.介绍了作者及华巾科技大学在储能技术及其应用方而的研究成果.
Application and prospect of energy storage in electrical engineering
[J].结合我国实际情况,提出了未来电气工程学科所而临的各种新问题,论述了储能技术存解决这些问题时所能发挥的作用,讨论了目前几种常用储能技术的特点和现状,以及储能技术发展的热点问题.介绍了作者及华巾科技大学在储能技术及其应用方而的研究成果.
开关磁阻电机发展综述
[J].
Summary on development of switched reluctance machine
[J].
飞轮储能系统用电动/发电机的研究
[J].
Research on motor/generator for flywheel storage system
[J].
DC/DC converter design for supercapacitor and battery power management in hybrid vehicle applications—Polynomial control strategy
[J].DOI:10.1109/TIE.2009.2025283 URL [本文引用: 1]
High efficiency power conditioner for photovoltaic power generation system
[C].
光伏并网发电系统对电网的影响研究综述
[J].
Influence of grid-connected photovoltaic system on power network
[J].
独立光伏发电系统能量管理控制策略
[J].随着能源危机和环境污染问题日益严重,太阳能光伏发电正成为世界关注的热点。提出一种新的太阳能独立光伏发电系统能量管理控制策略。系统由太阳能电池、蓄电池、单向DC-DC变换器和双向DC-DC变换器组成,太阳能电池提供负载稳定工作时所需要的能量,多余或不足的能量由蓄电池来动态调节。系统能量管理的核心是根据太阳能电池和蓄电池的工作状态,控制单向变换器和双向变换器工作在合适的模式,从而使太阳能电池和蓄电池协调工作,确保供电系统高效稳定运行以及快速的动态响应。通过原理样机验证了所提的系统能量管理控制策略的有效性。
Energy management control strategy for stand-alone photovoltaic power system
[J].随着能源危机和环境污染问题日益严重,太阳能光伏发电正成为世界关注的热点。提出一种新的太阳能独立光伏发电系统能量管理控制策略。系统由太阳能电池、蓄电池、单向DC-DC变换器和双向DC-DC变换器组成,太阳能电池提供负载稳定工作时所需要的能量,多余或不足的能量由蓄电池来动态调节。系统能量管理的核心是根据太阳能电池和蓄电池的工作状态,控制单向变换器和双向变换器工作在合适的模式,从而使太阳能电池和蓄电池协调工作,确保供电系统高效稳定运行以及快速的动态响应。通过原理样机验证了所提的系统能量管理控制策略的有效性。
飞轮储能系统及其运行控制技术研究
[J].
Research on flywheel energy storage system and its controlling technique
[J].
Control and performance of a doubly-fed induction machine intended for a flywheel energy storage system
[J].DOI:10.1109/TPEL.63 URL [本文引用: 1]
Modeling, simulation, and control of switched reluctance motor drives
[J].
DOI:10.1016/j.isatra.2008.10.012
URL
PMID:19100982
[本文引用: 1]

This paper considers the implementation of a current control method for switched reluctance motors (SRMs) and presents a novel approach to the accurate on-line modeling of an SRM drive. A simple autotuning technique for the SRM drives using a PWM controller is considered. Furthermore, conventional PI control and Internal Model Control (IMC) are considered to validate this method and present corresponding robust control analysis for the process. The control structures are comparatively analyzed using standard robustness measures for stability and performance. The proposed PWM controller is simulated and a hardware prototype is then implemented using digital signal processor control to evaluate the method using a 12/8, three-phase SRM. The experimental results of the SRM drive model validates the performance of the current loop.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}